Dados Internacionais de Catalogação-na-Publicação (CIP)
Divisão Biblioteca Central do ITA/CTA
Silva, Cleiton Diniz Pereira da Silva e
Controle preditivo de uma bomba de infusão de insulina para regulação da glicemia em
pacientes diabéticos tipo I / Cleiton Diniz Pereira da Silva e Silva.
São José dos Campos, 2004
128f.
Tese de mestrado - Curso de Engenharia Eletrônica e Computação - Área de Sistemas e
Controle - Instituto Tecnológico de Aeronáutica, 2004. Orientador: Prof. Dr. Takashi Yoneyama.
1. Controle preditivo. 2. GPC 3. Bomba de infusão. 4. Diabetes 5. Glicemia I. Centro
Técnico Aeroespacial. Instituto Tecnológico de Aeronáutica. Divisão de Engenharia Eletrônica.
II. Título
REFERÊNCIA BIBLIOGRÁFICA
SILVA, Cleiton Diniz Pereira da Silva e. Controle preditivo de uma bomba de infusão de
insulina para regulação da glicemia em pacientes diabéticos tipo I. 2004. 128f. Tese de
mestrado - Instituto Tecnológico de Aeronáutica, São José dos Campos.
CESSÃO DE DIREITOS
NOME DO AUTOR: Cleiton Diniz Pereira da Silva e Silva
TÍTULO DO TRABALHO: Controle preditivo de uma bomba de infusão de insulina para regula-
ção da glicemia em pacientes diabéticos tipo I.
TIPO DE TRABALHO: Tese / 2004
É concedida ao Instituto Tecnológico de Aeronáutica permissão para reproduzir cópias desta
tese e para emprestar ou vender cópias somente para propósitos acadêmicos e científicos. O
autor reserva outros direitos de publicação e nenhuma parte desta tese pode ser reproduzida
sem a autorização do autor.
Cleiton Diniz Pereira da Silva e Silva
R. Artur Monteiro Viana, 55
CEP: 58.109-140 Campina Grande, PB
CONTROLE PREDITIVO DE UMA BOMBA DE INFUSÃO
DE INSULINA PARA REGULAÇÃO DA GLICEMIA EM
PACIENTES DIABÉTICOS TIPO I
Cleiton Diniz Pereira da Silva e Silva
Composição da Banca Examinadora:
Prof. Dr. Elder Moreira Hemerly
Presidente - (ITA)
Prof. Dr. Takashi Yoneyama
Orientador - (ITA)
Prof. Dr. Agenor de Toledo Fleury
(IPT)
Prof. Dr. Karl Heinz Kienitz
(ITA)
Prof. Dr. Roberto Kawakami Harrop Gavão
(ITA)
ITA
Dedicatória
Aos meus pais, Wilton e Cleide, e aos meus
irmãos, Diogo e Uilma, pela amizade, incentivo e apoio em todos os momentos importantes de minha vida.
Agradecimentos
Ao meu orientador Takashi Yoneyama pelo seu apoio e incentivo.
À FAPESP pela bolsa cujo suporte tornou possível a realização deste trabalho.
A todo o pessoal da Biblioteca Central do ITA, em especial ao Aurélio, pela solicitude
e pela inestimável ajuda no levantamento de referências para este trabalho.
A todos os meus colegas que me incentivaram e apoiaram ao longo deste trabalho.
Resumo
O presente trabalho visa a investigar, via simulação numérica, o desempenho de um
controlador preditivo generalizado aplicado à regulação da glicemia em pacientes diabéticos
tipo I, mediante o emprego de bombas de infusão de insulina.
A simulação da dinâmica do sistema endócrino-metabólico em um paciente diabético tipo I, metabolicamente normalizado, foi realizada através de um modelo não-linear de
19a ordem bastante difundido na literatura. Em pacientes diabéticos tipo I, metabolicamente
não-normalizados, tal dinâmica foi simulada considerando-se variações, em relação aos valores
nominais, nos valores dos parâmetros do modelo anterior.
O controlador projetado, quando atuando em um paciente diabético metabolicamente
normalizado, teve o seu desempenho avaliado pelos valores máximos e mínimos da concentração de glicose no sangue periférico venoso e pelo intervalo de tempo para a concentração de
glicose anterior retornar à faixa de 2% em torno da concentração de referência, após uma refeição contendo uma quantidade pré-fixada de glicose. Quando o controlador proposto atuava em
um paciente diabético metabolicamente não-normalizado, inicialmente descompensado, o seu
desempenho foi avaliado pelo intervalo de tempo necessário para a glicemia retornar à faixa de
2% em torno da concentração de referência.
O desempenho apresentado pelo controlador proposto neste trabalho é comparável aos
já disponíveis na literatura sendo, entretanto, o controlador proposto aqui mais simples de ser
implementado e menos custoso computacionalmente.
Abstract
The present work investigates a predictive controller’s performance to maintain normoglycemia in type I diabetic patient using a insulin infusion pump.
The dynamics of the glucoregulatory system in a metabolic normalized type I diabetic
patient was simulated by a nonlinear 19th order model, commonly found in the literature. In
the metabolic unnormalized type I diabetic patient this dynamic was simulated regarding the
parameters in the previous model not equal to their nominal values.
When acting to maintain normoglycemia in a normalized type I diabetic patient, the
controller’s performance was assessed by the minimum and maximum peripheral blood glucose
concentration and the elapsed time for the glucose concentration values return to the interval of
2% around the reference concentration. In an unnormalized diabetic patient the performance
was assessed by the elapsed time for the glucose concentration return to the interval of 2%
around the reference concentration.
The controllers synthesized in this work showed a performance similar to those available in the literature, being, however, more easily implemented and less computationally demanding.
Sumário
Dedicatória
iii
Agradecimentos
iv
Resumo
v
Abstract
vi
Lista de Figuras
xi
Lista de Tabelas
xiv
Lista de Acrônimos
xv
Lista de Símbolos
xvi
1 Introdução
18
1.1
Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
1.2
Escopo do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
1.3
Contribuições do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
1.4
Organização do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
2 Regulação do metabolismo dos carboidratos
26
2.1
Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
2.2
Regulação do metabolismo da glicose em pessoas hígidas . . . . . . . . . . . .
27
2.2.1
29
Estimulação da secreção de insulina pela glicose sanguínea . . . . . . .
vii
2.2.2
Estimulação da secreção de glucagon pela glicose sanguínea . . . . . .
29
2.2.3
Efeito da insulina sobre o metabolismo dos carboidratos . . . . . . . .
29
2.2.4
Efeito do glucagon sobre o metabolismo dos carboidratos . . . . . . .
30
2.3
Os estados de hipoglicemia, hiperglicemia e normoglicemia . . . . . . . . . .
31
2.4
Diabetes mellitus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
2.4.1
Conceito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
2.4.2
Classificação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
2.4.3
Estágios de tolerância à glicose e diagnóstico . . . . . . . . . . . . . .
33
2.4.4
Prevalência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
34
2.4.5
Complicações agudas e crônicas . . . . . . . . . . . . . . . . . . . . .
34
2.4.6
Insulino terapias convencionais . . . . . . . . . . . . . . . . . . . . .
34
2.5
Modelos matemáticos da dinâmica da regulação do metabolismo dos carboidratos 35
2.5.1
Modelo fisiológico: pessoa hígida . . . . . . . . . . . . . . . . . . . .
2.5.2
Modelo patológico normalizado: paciente diabético tipo I metabolicamente normalizado . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.3
2.6
36
42
Modelo patológico não-normalizado: paciente diabético tipo I metabolicamente não-normalizado . . . . . . . . . . . . . . . . . . . . . . . .
43
Modelo matemático da absorção de glicose no trato gastrintestinal . . . . . . .
44
3 Controle Preditivo
46
3.1
Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3.2
Controle Preditivo Generalizado (GPC) . . . . . . . . . . . . . . . . . . . . .
49
3.2.1
Solução do GPC: Caso sem Restrições . . . . . . . . . . . . . . . . . .
63
3.2.2
Solução do GPC: Caso com Restrições . . . . . . . . . . . . . . . . .
64
Algoritmo da Estratégia GPC: Resumo . . . . . . . . . . . . . . . . . . . . . .
68
3.3
4 Metodologia
70
4.1
Simulação dos modelos patológicos . . . . . . . . . . . . . . . . . . . . . . .
70
4.2
Determinação do modelo interno . . . . . . . . . . . . . . . . . . . . . . . . .
71
4.3
Resolução do problema de programação quadrática . . . . . . . . . . . . . . .
74
viii
4.4
Índices de desempenho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
4.5
Sintonia dos controladores . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
4.6
4.5.1
Escolha de N1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
4.5.2
Escolha de δ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
4.5.3
Escolha de Nu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
4.5.4
Escolha de N2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
Verificação de desempenho do controlador projetado . . . . . . . . . . . . . .
79
5 Análise dos resultados
80
5.1
Simulações dos modelos patológicos . . . . . . . . . . . . . . . . . . . . . . .
81
5.2
Determinação do modelo interno . . . . . . . . . . . . . . . . . . . . . . . . .
84
5.3
Sintonia do controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
86
5.4
Verificação de desempenho do controlador escolhido . . . . . . . . . . . . . .
91
5.5
Comparação com resultados da literatura . . . . . . . . . . . . . . . . . . . . .
93
6 Comentários finais
102
6.1
Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
6.2
Sugestões para trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . 103
A Equações e Parâmetros do Modelo do Sorensen
104
A.1 Equações do balanço de massa do submodelo da glicose . . . . . . . . . . . . 104
A.2 Taxas metabólicas do submodelo da glicose . . . . . . . . . . . . . . . . . . . 105
A.2.1 Taxa de consumo de glicose no cérebro: . . . . . . . . . . . . . . . . . 105
A.2.2 Taxa de consumo de glicose pelas células vermelhas: . . . . . . . . . . 105
A.2.3 Taxa de utilização de glicose no intestino: . . . . . . . . . . . . . . . . 105
A.2.4 Taxa de produção hepática de glicose: . . . . . . . . . . . . . . . . . . 106
A.2.5 Taxa de consumo de glicose no fígado . . . . . . . . . . . . . . . . . . 106
A.2.6 Taxa de excreção de glicose pelos rins . . . . . . . . . . . . . . . . . . 107
A.2.7 Taxa de consumo de glicose na periferia . . . . . . . . . . . . . . . . . 107
A.3 Equações do balanço de massa do submodelo da insulina . . . . . . . . . . . . 108
A.3.1 Taxa da degradação de insulina no fígado:
ix
. . . . . . . . . . . . . . . 108
A.3.2 Taxa de degradação da insulina nos rins: . . . . . . . . . . . . . . . . . 109
A.3.3 Taxa de degradação da insulina na periferia: . . . . . . . . . . . . . . . 109
A.3.4 Taxa de liberação de insulina pelo pâncreas: . . . . . . . . . . . . . . . 109
A.4 Equações do submodelo do glucagon: . . . . . . . . . . . . . . . . . . . . . . 110
A.5 Taxas metabólicas no modelo do Glucagon: . . . . . . . . . . . . . . . . . . . 111
A.5.1 Taxa de liberação de glucagon pelo pâncreas: . . . . . . . . . . . . . . 111
A.5.2 Taxa de degradação do glucagon no plasma: . . . . . . . . . . . . . . . 111
A.6 Parâmetros do modelo da glicose . . . . . . . . . . . . . . . . . . . . . . . . . 112
A.7 Parâmetros do modelo da insulina . . . . . . . . . . . . . . . . . . . . . . . . 113
A.8 Parâmetros do modelo do glucagon . . . . . . . . . . . . . . . . . . . . . . . . 114
B Equações Diofantinas
115
B.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
B.2 Equações diofantinas polinomiais lineares: existência de soluções . . . . . . . 116
B.3 A equação: Ã(z −1 )E(z −1 ) + z −j F (z −1 ) = 1 . . . . . . . . . . . . . . . . . . 116
B.3.1
Solução E1 (z −1 ), F1 (z −1 ) com deg(E1 (z −1 )) = 0 . . . . . . . . . . . 118
B.3.2
Recursão das soluções Ej (z −1 ), Fj (z −1 ) com deg(Ej (z −1 )) = j − 1 . . 119
B.4 Algoritmo para o cálculo recursivo das soluções Ej ,Fj : resumo . . . . . . . . . 122
Referências Bibliográficas
123
Glossário
127
x
Lista de Figuras
1.1
Representação esquemática do sistema de controle para regulação da glicemia
em malha fechada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
1.2
Definição das variáveis de interesse . . . . . . . . . . . . . . . . . . . . . . .
23
2.1
Diagrama esquemático da regulação do metabolismo da glicose pela insulina e
glucagon em pessoas hígidas . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
2.2
Representação esquemática dos compartimentos do submodelo da glicose . . .
37
2.3
Representação esquemática dos compartimentos do submodelo da insulina . . .
38
2.4
Representação esquemática dos compartimentos do submodelo do glucagon . .
39
2.5
Definição dos compartimentos empregados nos modelos de Sorensen (1985) . .
39
2.6
Definição das entradas do modelo da absorção de glicose no trato gastrintestinal
de Lehmann e Deutsch (1992) . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1
Representação esquemática do princípio geral seguido pelas diversas estratégias
de controle preditivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1
45
47
Concentração basal de glicose no sangue venoso da periferia, Gbasal (mg/dl),
em função da taxa de infusão intravenosa de insulina, rIV I (mU/min), para o
modelo patológico normalizado. . . . . . . . . . . . . . . . . . . . . . . . . .
5.2
81
Concentração basal de glicose no sangue venoso da periferia, Gbasal , em função
dos parâmetros representativos de um distúrbio metabólico assumindo rIV I =
22,4 mU/min. Enquanto um parâmetro foi variado, os outros foram mantidos
em seus valores nominais. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xi
82
5.3
Concentração de glicose no sangue venoso da periferia observada em um paciente diabético normalizado sem bomba de infusão (modelo patológico normalizado inicializado com rIV I = 22,4 mU/min) após uma refeição com 50 g de
carboidrato no instante 50 min (taxa de absorção de glicose no trato gastrintestinal obtida com o modelo de Lehmann e Deutsch (1992)). . . . . . . . . . . .
5.4
Influência da quantidade de carboidratos na alimentação (Qc ) em Gmax e em ta
para o modelo metabolicamente normalizado sem bomba de infusão. . . . . . .
5.5
83
84
Comparação entre as respostas ao degrau unitário dos modelos lineares com a
resposta ao degrau unitário do modelo patológico normalizado sem o valor de
regime. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6
Concentração de glicose no sangue periférico venoso (G) em função de N2 com
Nu = 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7
85
88
Controle (u) e variação do sinal de controle (4u) quando Nu = 1 e N2 = 5 ou
N2 = 20. Observe que o aumento de N2 diminui a variação do sinal de controle. 88
5.8
Verificação do desempenho em função do N2 para Nu = 1. . . . . . . . . . . .
5.9
Concentração de glicose no sangue periférico venoso (G) em função de N2 com
96
Nu = 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
97
5.10 Controle (u) e variação do sinal de controle (4u) quando Nu = 2 e N2 = 20. .
97
5.11 Verificação do desempenho em função do N2 para Nu = 2. . . . . . . . . . . .
98
5.12 Concentração de glicose no sangue periférico venoso após uma refeição com
50 g de carboidratos no instante 50 min e controlador com N2 = 20 e Nu = 3
ou Nu = 4 atuando. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
5.13 Concentração de glicose no sangue periférico venoso observada em um paciente
diabético metabolicamente normalizado usando a bomba de infusão . . . . . .
99
5.14 Taxa de infusão (u) e variação da taxa de infusão (4u) calculadas pelo controlador escolhido (parâmetros N1 = 1, N2 = 15, Nu = 1 e δ = 0). . . . . . . . .
99
5.15 Comparação da concentração de glicose observada em um paciente diabético
metabolicamente normalizado com e sem controlador (parâmetros N1 = 1,
N2 = 15, Nu = 1 e δ = 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
xii
5.16 Impacto da variação de Qc (entre 15 g e 120 g) nos índices de desempenho
observados em um paciente diabético metabolicamente normalizado com controlador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.17 Concentração de glicose no sangue periférico venoso observada em um paciente
diabético metabolicamente nomalizado submetido à refeições com Qc = 50 g e
Qc = 100 g. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.18 Tempo para o controlador reestabelecer a normogligemia (ta ) em pacientes metabolicamente não-normalizados . . . . . . . . . . . . . . . . . . . . . . . . . 101
xiii
Lista de Tabelas
2.1
Valores de glicose plasmática (mg/dl) para diagnóstico de diabetes mellitus e
seus estágios pré-clínicos (SBD, 2000) . . . . . . . . . . . . . . . . . . . . . .
2.2
Resumo dos processos fisiológicos que definem as fontes e sorvedouros metabólicos no modelo da glicose . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3
40
Resumo dos processos fisiológicos que definem as fontes e sorvedouros metabólicos no modelo da insulina . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4
34
40
Resumo dos processos fisiológicos que definem as fontes e sorvedouros metabólicos no modelo do glucagon . . . . . . . . . . . . . . . . . . . . . . . . . .
40
2.5
Definição das fontes e sorvedouros metabólicos do submodelo da glicose . . .
41
2.6
Definição das fontes e sorvedouros metabólicos do submodelo da insulina . . .
41
2.7
Definição das fontes e sorvedouros metabólicos do submodelo do glucagon . .
41
2.8
Definição da faixa de variação dos parâmetros representativos de distúrbios metabólicos associados ao diabetes mellitus . . . . . . . . . . . . . . . . . . . . .
5.1
44
Concentrações mínima (Gmin ) e máxima (Gmax ) de glicose no sangue periférico venoso e tempo de acomodação de 2% (ta ) observadas em paciente diabético tipo I metabolicamente normalizado (modelo patológico normalizado)
após a ingestão de uma refeição com 50 g de carboidratos. . . . . . . . . . . .
5.2
83
Valores dos índices de desempenho alcançados pelo controlador escolhido atuando em paciente diabético metabolicamente normalizado após uma refeição
5.3
com 50 g de carboidratos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
Comparação com outros controladores apresentados na literatura. . . . . . . . .
94
xiv
Lista de Acrônimos
ADA
American Diabetes Association
ARIMAX
Auto-Regressive Integrated Moving-Average eXogenous
ARIX
Auto-Regressive Integrated eXogenous
CARIMA
Controlled Auto-Regressive Integrated Moving-Average
DMC
Dynamic Matrix Control
GPC
Generalized Predictive Control
IMC
Internal Model Control
MPCSE
Model Predictive Control with State Estimation
NLQDMCSE
Nonlinear Quadratic Dynamic Matrix Control with State Estimation
SBD
Sociedade Brasileira de Diabetes
SISO
Single-Input Single-Output
TDI
Tecidos Dependentes da Insulina
TGI
Trato Gastrintestinal
TII
Tecidos Independentes da Insulina
TTGO
Teste de Tolerância a Glicose Oral
ZOH
Zero Order Hold
xv
Lista de Símbolos
kxk 2
Norma euclidiana de x
deg(P )
Grau do polinômio P
E [A|B]
Esperança de A dado B
mdc (a, b)
Maior divisor comum entre a e b
δ
Peso na função custo
d
Atraso do sistema
G
Concentração de glicose no sangue venoso da periferia (mg/dl)
G
Matriz G usada no cálculo do vetor de predições Y(k)
Gbasal
Concentração basal (em regime) de glicose no sangue venoso da periferia
(mg/dl)
Gmax
Concentração máxima de glicose no sangue venoso da periferia (mg/dl)
Gmin
Concentração mínima de glicose no sangue venoso da periferia (mg/dl)
N1
Horizonte inicial de predição da saída
N2
Horizonte final de predição da saída
Nu
Horizonte de predição do sinal de controle
Qu
Quantidade de insulina acima da basal injetada pelo controlador (U)
rIV I
Taxa de infusão intravenosa de insulina (mU min)
xvi
rOGA
Taxa de absorção de glicose no trato gastrintestinal (mg/min)
ta
Tempo de acomodação de 2% (min)
u
Variável manipulada
U
Unidade de insulina
4u
Variação da variável manipulada
uinfundida
Taxa de infusão intravenosa de insulina (mU/min)
4uinfundida
Variação na taxa de infusão intravenosa de insulina(mU/min por período de
amostragem)
4U (k)
Seqüência futura de variações do sinal de controle
ŷ(k + j|k)
Valor predito da saída no instante k + j calculada com as informações disponíveis até o instante k
Y(k)
Vetor de predições
z −1
Operador atrasador. z −1 x(k) = x(k − 1)
xvii
Capítulo 1
Introdução
Neste capítulo serão apresentadas as motivações que levaram à realização deste trabalho. Será discutida a importância do projeto de um controlador para uma bomba de infusão de
insulina bem como da escolha da estratégia de controle preditivo. Em seguida será delineado o
escopo do trabalho e, por fim, será apresentada a sua organização, com uma pequena introdução
sobre o que será discutido em cada um dos capítulos subseqüentes.
1.1 Motivação
O diabetes mellitus é uma síndrome crônica que atinge milhões de pessoas em todo o
mundo, constituindo um importante problema de saúde pública uma vez que, freqüentemente,
quando não controlado, está associado a complicações que comprometem a produtividade, a
qualidade de vida e a sobrevida dos indivíduos, além de envolver altos custos no seu tratamento
(SBD, 2000).
Em particular, o diabetes mellitus tipo I é uma síndrome que decorre da destruição das
células β das ilhotas pancreáticas. A principal conseqüência desta destruição é uma deficiência, geralmente absoluta, na secreção de insulina pelo pâncreas, o que promove uma série de
distúrbios no metabolismo dos carboidratos, lipídios e proteínas que, quando não controlados,
podem produzir uma série de complicações agudas e crônicas (SBD, 2000).
A maioria das complicações crônicas (a longo prazo) está associada às altas concentrações de glicose no sangue (acima de 120 mg/dl), sustentadas por longos períodos, comuns
CAPÍTULO 1. INTRODUÇÃO
19
em pacientes diabéticos não tratados. Dentre estas complicações destacam-se: a retinopatia diabética e hemorragias intra-vítreo com possível evolução para a cegueira; a nefropatia diabética
com glomeruloesclerose que pode levar à necessidade de diálises ou mesmo de transplantes renais; a neuropatia periférica com desmielinização segmentar com redução da sensibilidade nas
vias aferentes; a aceleração da aterosclerose que pode levar a grangrenas secundárias e a isquemia; além de riscos de cetoacidose diabética ou coma hiperosmolar, entre outros (GUYTON;
HALL, 1998; PUPO, 1984; GANONG, 1977).
Dadas as diversas complicações advindas do diabetes, o tratamento torna-se indispensável. Os procedimentos atuais de tratamento, no caso de pacientes insulino-dependentes,
incluem injeções subcutâneas de insulina (agente hipoglicemiante), infusão subcutânea contínua de insulina (em malha aberta) ou infusão contínua intravenosa de insulina (em malha aberta
e geralmente em hospitais) (ADA, 2003; TYAGI, 2002). A aplicação subcutânea de insulina
pode exigir do diabético múltiplas injeções diárias, sendo a quantidade de insulina a ser injetada calculada em função dos seguintes parâmetros: medição da concentração de glicose no
sangue, feita com o auxílio de um glucosímetro; estimativa do conteúdo de carboidratos da refeição; quantidade de exercícios realizados (a entrada de glicose nos músculos aumenta durante
a prática de exercício) e tipo de insulina a ser injetada.
Aplicando-se quaisquer dos métodos de tratamento citados acima, observa-se uma significativa, e geralmente freqüente variação da concentração de glicose no sangue, devido, principalmente, à natureza em malha aberta da infusão de insulina. Além disso, estes métodos exigem
muita disciplina e organização do paciente (ADA, 2003; TYAGI, 2002). Devido a estes fatores
justifica-se a necessidade de uma bomba que injete insulina automaticamente, na quantidade
adequada, de modo que a quantidade de glicose no sangue se mantenha num nível aceitável,
mesmo com a variação dos diversos fatores aos quais o indivíduo está sujeito. Essa bomba,
sendo implantada no indivíduo, evitaria, por exemplo, que por algum descuido da pessoa (erro
ou esquecimento da hora ou da quantidade da dose de insulina que deveria tomar), a sua concentração sanguínea de glicose ficasse fora dos limites normais (entre 70 mg/dl e 100 mg/dl,
segundo Pupo (1984)).
O atual desenvolvimento de modelos mais acurados que descrevem a dinâmica da re-
CAPÍTULO 1. INTRODUÇÃO
20
gulação do metabolismo da glicose; os avanços tecnológicos no campo dos sensores de glicemia
(sensores com grande sensibilidade, baixo consumo de energia, resposta rápida, pouca necessidade de calibração e miniaturizados, que já estão sendo disponibilizados); os avanços no campo
dos dispositivos controlados de infusão de fármacos (capazes de infundir precisamente pequenas quantidades, dezenas de µl) bem como o progresso em termos de estratégias de controle
automático têm proporcionado o desenvolvimento de controladores cada vez mais próximos de
reproduzir o funcionamento do pâncreas no controle da glicemia sanguínea (STEIL et al., 2004;
RENARD et al., 2002; JARENKO; RORSTAD, 1998).
Dentre os diversos trabalhos que abordam o desenvolvimento de modelos do sistema
endócrino-metabólico de regulação da glicemia destacam-se: (LOPES, 2002; PUCKETT, 1992;
LEHMANN; DEUTSCH, 1992; SORENSEN, 1985; COBELLI et al., 1984). Por outro lado, dentre
os que tratam do desenvolvimento de sensores de glicemia encontram-se: (GARG et al., 2004;
YONZON et al., 2004; HELLER, 1999; LAGER et al., 1994; UPDIKE et al., 1994).
Na literatura, encontram-se ainda disponíveis diversos algoritmos de controle para
bombas de infusão de insulina nos mais variados graus de complexidade. Neste trabalho, em
particular, será projetado e avaliado um controlador preditivo GPC1 (CLARKE et al., 1987a).
Para uma revisão das diversas técnicas de controle já empregadas no controle da glicemia
destacam-se os seguintes trabalhos: (LOPES, 2002), (PARKER et al., 2001) e (BELLAZZI et
al., 2001).
Dentre as razões que levaram a esta escolha da estratégia de controle preditivo destacamse: o fato da estratégia já ter sido aplicada com sucesso na solução de outros problemas da
engenharia biomédica, incluindo controle da pressão (KWOK et al., 1995; GOPINATH et al.,
1995) e de infusão de anestesia (WADA; WARD, 1995) além do fato desta estratégia permitir,
de forma natural, levar-se em consideração, ainda na fase de projeto, as restrições do problema
(ROSSITER, 2003; CAMACHO; BORDONS, 2000).
Dentre outros trabalhos que utilizam alguma estratégia de controle preditivo para projetar controladores que visam a regulação da glicemia destacam-se: (LOPES, 2002; PARKER et
al., 1999; TRAJANOSKI et al., 1998; TRAJANOSKI, 1998).
1
Do inglês Generalized Predictive Control
CAPÍTULO 1. INTRODUÇÃO
21
Lopes (2002) propõe controladores baseados na técnica GPC para a normalização da
glicemia em pacientes diabéticos, inicialmente descompensados, com infusão intravenosa ou
subcutânea de insulina. Ele estuda, também, controladores que infudem tanto glicose quanto
insulina para reestabelecer a normoglicemia.
Parker et al. (1999) propõem controladores utilizando as seguintes estratégias de controle preditivo: DMC2 , MPCSE3 e NQDMCSE4 além de apresentar uma versão discretizada
do controlador IMC5 projetado por Sorensen (1985). Os controladores são sintonizados com
o objetivo de maximizar a concentração mínima de glicose no sangue periférico venoso e reduzir o tempo que a concentração de glicose sanguínea leva para retornar à faixa de 2% em
torno da concentração de referência, após uma refeição com uma quantidade pré-determinada
de carboidratos.
Trajanoski et al. (1998) e Trajanoski (1998) propõem uma estratégia de controle preditivo neural e empregam esta estratégia em um controlador para uma bomba de infusão subcutânea de insulina. A proposta do controlador é regular a concentração de glicose no sangue após
uma refeição com quantidade pré-determinada de glicose. Maiores detalhes sobre estratégias de
controle preditivo neural são discutidas, por exemplo, em (NØRGAARD et al., 2003; MELEIRO,
2002).
1.2 Escopo do Trabalho
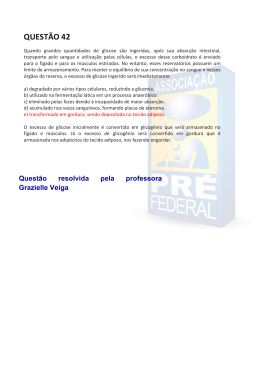
Este trabalho concerne o projeto e a análise de algoritmos de controle preditivo generalizado (CLARKE et al., 1987a), via simulação numérica, para uma bomba de infusão de insulina
(ver figura 1.1) para regulação da concentração de glicose no sangue de um paciente diabético
tipo I. O objetivo do controle é fazer com que a concentração de glicose no sangue periférico
venoso (denotado por G) volte, tão rápido quanto possível, para um valor em torno de 75 mg/dl
após uma refeição rica em carboidrato (especialmente glicose). Esta concentração de referência
foi a concentração média de glicose, no sangue periférico venoso, medida em pessoas hígidas,
2
Do inglês Dynamic Matrix Control (CUTLER; RAMAKER, 1980, 1979)
Do inglês Model Predictive Control with State Estimation (RICKER, 1990)
4
Do inglês Nonlinear Quadratic Dynamic Matrix Control with State Estimation (GATTU; ZAFIRIOU, 1992)
5
Do inglês Internal Model Control (GARCIA; MORARI, 1982)
3
CAPÍTULO 1. INTRODUÇÃO
22
Distúrbio
Referência
Algoritmo de
controle
Bomba de
infusão
Paciente
diabético
Taxa de infusão
de insulina
Controlador
Valor medido da
concentração de glicose
Sensor de
glicose
Concentração de glicose
Figura 1.1: Representação esquemática do sistema de controle para regulação da glicemia em
malha fechada
quando em jejum, que serviram como voluntários no trabalho do Sorensen (1985).
O paciente diabético será representado, inicialmente, pelo modelo patológico normalizado (modelo de simulação de um paciente diabético tipo I metabolicamente normalizado6 )
elaborado por Sorensen (1985) com o intuito de avaliar diferentes insulinoterapias. Em seguida
serão consideradas variações nos parâmetros do modelo anterior de forma a obter-se modelos
representativos de pacientes diabéticos não-normalizados, referidos como modelos patológicos
não-normalizados. Os parâmetros representativos de distúrbios metabólicos serão extraídos dos
trabalhos de Parker et al. (2001) e Parker et al. (2000).
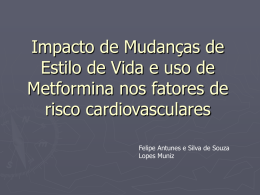
A variável de saída (variável controlada) será a concentração de glicose no sangue venoso da periferia, enquanto que a variável manipulada (sinal de controle) será a taxa de infusão
intravenosa de insulina. Já o distúrbio será considerado como sendo a taxa de absorção de
glicose no trato gastrintestinal (alimentação modelada conforme em (LEHMANN; DEUTSCH,
1992)). A figura 1.2 resume as variáveis de interesse.
Admitir-se-á que a variação na taxa de infusão intravenosa de insulina, 4uinfundida , deve
obedecer, assim como em (PARKER et al., 1999), a seguinte restrição:
|4uinfudida | ≤ 16,5 mU/min por período de amostragem7
6
(1.1)
Neste modelo é assumida deficiência total na produção endógena de insulina não sendo, entretanto, considerado nenhum distúrbio metabólico comumente associado ao diabetes como, por exemplo, resistência a ação da
insulina.
7
Uma unidade de insulina (1 U) humana equivale a, aproximadamente, 40 µg de insulina
CAPÍTULO 1. INTRODUÇÃO
23
Taxa de absorção
de glicose no trato
gastrintestinal
Paciente
Diabético
Concentração de glicose
no sangue venoso da
periferia
Taxa de infusão
intravenosa de insulina
Figura 1.2: Definição das variáveis de interesse: a variável controlada será a concentração
de glicose no sangue venoso da periferia (G), a variável manipulada será a taxa de infusão
intravenosa de insulina (uinfudida ) e o distúrbio considerado será a taxa de absorção de glicose
no trato gastrintestinal (rOGA ). O paciente diabético será o modelo patológico de Sorensen
(1985) enquanto que a taxa de absorção de glicose no trato gastrintestinal é dada pelo modelo
de Lehmann e Deutsch (1992).
e que a taxa de infusão intravenosa de insulina, uinfundida , deve obedecer
0 mU/min ≤ uinfudida ≤ 66,25 mU/min
(1.2)
A restrição (1.1) na variação da taxa de infusão intravenosa de insulina foi imposta
com o intuito de garantir que não sejam exigidas da bomba de infusão taxas de infusão uinfudida
maiores que aquela que o seu mecanismo pode tolerar. Entretanto, se considerada a infusão de
insulina com concentração de 100 U por ml, que é a concentração das insulinas normalmente
vendidas no Brasil (LOPES, 2002), a restrição (1.1) na variação de taxa de infusão intravenosa
de insulina é, na realidade, bastante conservadora para as bombas disponíveis atualmente. As
bombas de infusão disponíveis atualmente já são capazes de infundir, precisamente, volumes
que variam de centenas de nl até centenas de µl (A La Van et al., 2003; HATCH et al., 2001;
COHEN, 1993). Justifica-se, entretanto, a manutenção desta restrição como um mecanismo para
prevenir que eventuais falhas no algoritmo de controle injetem insulina rápido demais causando
hipogligemia (baixa concentração de glicose no sangue) o que poderia causar desmaios, coma
ou mesmo morte do paciente.
A restrição (1.2), por sua vez, foi imposta para impedir que o algoritmo tente retirar insulina após a mesma ter sido injetada (uinfundida ≥ 0 mU/min) e que o paciente não
seja submetido a concentrações sanguíneas de insulina maiores que as fisiológicas (uinfundida ≤
66,25 mU/mim)8 .
8
Este limitante superior na taxa de infusão intravenosa de insulina foi extraído de Sorensen (1985).
CAPÍTULO 1. INTRODUÇÃO
24
O algoritmo de controle proposto será avaliado pela sua capacidade de regular, em
um paciente diabético metabolicamente normalizado, a concentração de glicose no sangue periférico venoso, após uma refeição com uma quantidade pré-determinada de carboidratos. Tal
avaliação será feita observando-se, após uma refeição:
• A concentração máxima de glicose no sangue periférico venoso (Gmax );
• A concentração mínima de glicose no sangue periférico venoso (Gmin );
• O tempo para a concentração de glicose no sangue periférico venoso voltar à faixa dos
2% em torno da concentração de referência (ta );
• A quantidade de insulina infundida até a concentração voltar à faixa dos 2% (Qu );
• A presença de oscilações na concentração de glicose no sangue periférico venoso.
Ainda, o algoritmo proposto será avaliado pela sua capacidade de restabelecer a normoglicemia em um paciente diabético metabolicamente não-normalizado inicialmente descompensado. Esta avaliação será feita analisando-se o tempo necessário para a concentração de
glicose (G) voltar à faixa de 2% em torno da concentração de referência.
Por fim, o controlador preditivo desenvolvido será comparado com os apresentados na
literatura com o mesmo fim dos controladores estudados neste trabalho.
1.3 Contribuições do Trabalho
As principais contribuições deste trabalho são:
• Projeto e análise de um algoritmo de controle preditivo generalizado para uma bomba de
infusão de insulina para a regulação da glicemia em pacientes diabéticos tipo I (deficiência total na secreção de insulina);
• Comparação do algoritmo de controle estudado neste trabalho com outros disponíveis na
literatura, em especial os apresentados em Parker et al. (1999) e Lopes (2002);
CAPÍTULO 1. INTRODUÇÃO
25
• Os resultados deste trabalho sugerem também que não necessariamente deve-se empregar,
no algoritmo de controle, um modelo acurado do sistema controlado para se obter uma
desempenho satisfatório (pelo menos quando a razão entre o tempo de acomodação de
2% e o tempo de amostragem é elevada. Neste trabalho esta razão é da ordem de 70);
• Sugestão de algumas escolhas que visam a facilitar o processo de sintonia de um controlador preditivo (em especial é estudado o parâmetro δ, peso na função custo da estratégia
estudada).
1.4 Organização do Trabalho
O presente capítulo tem o objetivo de apresentar as principais motivações para a realização deste trabalho, bem como expor as contribuições do mesmo.
O segundo capítulo tem por objetivo fazer uma breve discussão sobre a regulação do
metabolismo da glicose e apresentar algumas definições e conceitos importantes de modo a
fundamentar uma base mínima para o entendimento dos capítulos subseqüentes.
A técnica de controle preditivo é apresentada no capítulo 3. Neste capítulo, dicute-se os
detalhes da formulação de controle preditivo generalizado, (CLARKE et al., 1987a), empregada
neste trabalho.
O capítulo 4 mostra os passos seguidos para o projeto dos controladores e no capítulo
5 serão discutidos os resultados obtidos.
Finalmente, o capítulo 6 relata as conclusões deste trabalho assim como as diversas
sugestões para possíveis trabalhos futuros.
Capítulo 2
Regulação do metabolismo dos
carboidratos
Neste capítulo será feita uma breve discussão sobre a regulação do metabolismo dos
carboidratos, em particular da glicose, sendo apresentados algumas definições e conceitos importantes, de modo a fundamentar uma base mínima para o entendimento dos capítulos subseqüentes. Será descrito o que ocorre nas condições patológicas que definem os principais tipos
do diabetes mellitus, e as principais complicações agudas e crônicas que podem advir ao paciente diabético. Serão apresentados, ainda, dados recentes sobre prevalência, diferenças entre
os tipos do diabetes, e as terapias usualmente adotadas em âmbito clínico no Brasil. Em seguida serão apresentados os modelos matemáticos da dinâmica da regulação da glicemia em
uma pessoa hígida (modelo fisiológico), em um paciente diabético tipo I metabolicamente normalizado (modelo patológico normalizado) e em um paciente diabético tipo I metabolicamente
não-normalizado (modelo patológico não-normalizado) que foram usados neste trabalho. Por
fim, será apresentado o modelo matemático empregado para simular a absorção de glicose no
trato gastrintestinal.
2.1 Introdução
Os alimentos de que depende o organismo, com exceção de pequenas quantidades de
substâncias como vitaminas e minerais, podem ser classificados em carboidratos, gorduras e
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
27
proteínas. Por não serem, geralmente, absorvidos em suas formas naturais (sendo, portanto,
inúteis como nutrientes), os carboidratos, as gorduras e as proteínas são inicialmente digeridos,
dando origem a substâncias suficientemente pequenas para serem absorvidas e, então, serem
utilizadas como nutrientes (GUYTON; HALL, 1998).
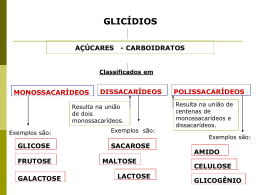
Na dieta humana normal, existem três fontes principais de carboidratos: a sacarose, a
lactose e os amidos, cujos produtos da digestão são os monossacarídios glicose (95% de todos
os monossacarídios que circulam no sangue), galactose e frutose. Quase toda a gordura da
dieta consiste em triglicerídios (gorduras neutras), cujo produto da digestão são ácidos graxos
e glicerol. As proteínas, enfim, têm como produto da digestão os aminoácidos (GUYTON;
HALL, 1998).
Apesar do metabolismo dos carboidratos, gorduras e proteínas não serem processos
definidos por vias metabólicas isoladas, mas sim interdependentes, é comum na literatura o
estudo isolado do metabolismo dos carboidratos, o que torna factível a análise dinâmica da
glicose, pelo menos do ponto de vista macroscópico (ZIERLER, 1999).
Neste trabalho, será discutido brevemente apenas o metabolismo da glicose, monossacarídeo mais abundante na circulação sanguínea, admitido isolado do metabolismo das gorduras
e proteínas. Dentre os sistemas de controle do organismo para a regulação da glicemia, apenas
a ação dos hormônios insulina e glucagon, ambos secretados pelas ilhotas de Langerhans do
pâncreas, serão abordados. Outros hormônios, como a epinefrina, os hormônios tireoidianos,
os glicocorticóides e o hormônio do crescimento, que desempenham papéis importantes, porém
secundários, na homeóstase da glicemia (GANONG, 1977), não serão abordados. Discussões
mais detalhadas podem ser encontradas em (ZIERLER, 1999), (GUYTON; HALL, 1998), (GANONG, 1977) e suas referências.
2.2 Regulação do metabolismo da glicose em pessoas hígidas
Em pessoas hígidas, a concentração de glicose no sangue é mantida dentro de limites
muito estreitos, em geral na faixa de 70 a 100 mg/dl quando em jejum1 . Durante a primeira
hora após uma refeição, essa concentração aumenta para 120 a 140 mg/dl aproximadamente,
1
O jejum é definido como a falta de ingestão calórica de, no mínimo, 8 horas (SBD, 2000).
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
28
mas os sistemas de controle, discutidos a seguir e esquematizados na figura 2.1, fazem com
que ela volte rapidamente aos valores iniciais (de 70 a 100 mg/dl), em geral duas horas após
a última absorção de carboidrato. De modo inverso, na inanição, mecanismos de controle, que
também serão discutidos a seguir, impedem que esta concentração caia em demasia (GUYTON;
HALL, 1998).
Os mecanismos para a consecução desse elevado grau de regulação, pelos hormônios
insulina e glucagon, da concentração de glicose no sangue, em pessoas hígidas são esquematizados, resumidamente, no diagrama da figura 2.1, onde: TII representa os tecidos que independem
da ação da insulina para utilizarem glicose com fins energéticos, como o cérebro e o sistema
nervoso central; TDI, por sua vez, representa os tecidos que dependem da ação da insulina para
utilizarem adequadamente glicose para fins energéticos, especialmente os músculos e tecido
adiposo; TGI representa o trato gastrintestinal.
TGI
TII
Glicose
Pâncreas
Sangue
TDI
Glucagon
Insulina
Fígado
Insulina
Fluxo de glicose
Sinal de controle
Figura 2.1: Diagrama esquemático da regulação do metabolismo da glicose em pessoas hígidas
pelos hormônios insulina e glucagon. TGI, TII e TDI significam, respectivamente, trato gastrintestinal, tecidos independentes da ação da insulina, tecidos dependentes da ação da insulina.
A influência da concentração de glicose na estimulação da secreção pancreática de insulina será discutida no item 2.2.1 e de glucagon no item 2.2.22 . Nos itens 2.2.3 e 2.2.4 discutese, respectivamente, o efeito da insulina e do glucagon no metabolismo dos carboidratos, em
especial da glicose.
2
Na figura 2.1 a influência da concentração de glicose tanto na estimulação da secreção pancreática de insulina
quanto na estimulação da secreção pancreática de glucagon é indicada pela seta tracejada do sangue para o pâncreas
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
29
Observa-se, na figura 2.1, que o glucagon estimula a transferência de glicose do fígado para o sangue. A insulina, por sua vez, estimula tanto a remoção de glicose do sangue
para o fígado (estágio pós-prandial3 ) quanto a remoção de glicose do sangue pelos tecidos que
dependem da ação da insulina (TDI).
2.2.1 Estimulação da secreção de insulina pela glicose sanguínea
Quando a concentração de glicose sanguínea está na faixa de 70 a 100 mg/dl, a secreção de insulina pelo pâncreas é bastante reduzida. Entretanto, quando a concentração de
glicose aumenta substancialmente para um nível duas a três vezes superior ao normal, e é mantida nesse nível elevado, notam-se duas fases no aumento da secreção de insulina. Na primeira
fase, a concentração plasmática de insulina aumenta quase 10 vezes dentro de 3 a 5 min. Essa
elevada secreção inicial não se mantém, reduzindo-se num prazo de mais 5 a 10 min, à metade
do aumento inicial. Na segunda fase, iniciada após cerca de 15 min, a secreção de insulina
se eleva uma segunda vez e atinge um novo patamar em 2 a 3 h, desta vez geralmente com
velocidade de secreção ainda maior que a da fase inicial (GUYTON; HALL, 1998).
Além disso, a interrupção da secreção de insulina ocorre alguns minutos após a concentração sanguínea de glicose voltar ao nível de jejum.
2.2.2 Estimulação da secreção de glucagon pela glicose sanguínea
Ao contrário da insulina, cuja secreção é estimulada por altas concentrações sanguíneas de glicose, a secreção de glucagon pelo pâncreas é estimulada por uma redução na concentração sanguínea de glicose (GUYTON; HALL, 1998).
2.2.3 Efeito da insulina sobre o metabolismo dos carboidratos
Segundo Guyton e Hall (1998), de todos os efeitos da insulina sobre o metabolismo
dos carboidratos, um dos mais importantes é fazer com que a maior parte da glicose absorvida
após uma refeição seja quase imediatamente armazenada no fígado, sob a forma de glicogênio
(ver, na figura 2.1, o fluxo de glicose do sangue para o fígado, promovido pela insulina).
3
Após uma refeição
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
30
Experiências em cães hepatectomizados (fígado removido cirurgicamente) mostram
que, em jejum, a glicemia encontra-se na faixa de normal. Porém, administrando-se glicose
a esses cães as curvas de tolerância à glicose são do tipo diabético, mesmo com o pâncreas
intacto, devido à impossibilidade de armazenar, no fígado, sob a forma de glicogênio, a glicose
absorvida na alimentação. Por outro lado, administrando-se infusão constante de insulina a cães
pancreatectomizados (pâncreas removido cirurgicamente), com fígado intacto, eles apresentam
essencialmente uma curva normal de tolerância a glicose (GANONG, 1977).
Outra ação da insulina na regulação do metabolismo dos carboidratos é a facilitação da
entrada de glicose em quase todos os tecidos, especialmente nos músculos. Segundo (GUYTON;
HALL, 1998), a insulina pode aumentar em pelo menos 15 a 20 vezes o transporte de glicose
para o interior das células musculares.
2.2.4 Efeito do glucagon sobre o metabolismo dos carboidratos
O glucagon exerce várias funções opostas às da insulina, sendo a mais importante
delas aumentar a concentração sanguínea de glicose. Os dois principais efeitos deste hormônio
sobre o metabolismo da glicose são: (1) decomposição do glicogênio hepático em glicose (ver,
na figura 2.1, o fluxo de glicose do fígado para o sangue) e (2) o aumento da conversão de
aminoácidos em glicose (não mostrado na figura 2.1) (GUYTON; HALL, 1998; PUPO, 1984).
Entre as refeições, quando não há alimento disponível e a concentração sanguínea de
glicose começa a cair, o glicogênio hepático, influenciado pelo glucagon, é novamente decomposto em glicose, que volta a ser liberada para o sangue para impedir que a concentração de
glicose caia demais (GUYTON; HALL, 1998).
O efeito mais intenso do glucagon, entretanto, é a sua capacidade de provocar glicogenólise no fígado (conversão do glicogênio armazenado no fígado em glicose) o que, por sua
vez, aumenta a concentração sanguínea de glicose em poucos minutos. Segundo Guyton e Hall
(1998) uma infusão de glucagon por cerca de 4 horas pode causar uma glicogenólise hepática
tão intensa que todas as reservas hepáticas de glicogênio ficarão completamente esgotadas.
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
31
2.3 Os estados de hipoglicemia, hiperglicemia e normoglicemia
Quando a concentração de glicose plasmática cai abaixo de 60 mg/dl, seja pelo consumo excessivo, seja pela produção endógena insuficiente, seja pelo desvio da glicose para
outras vias metabólicas (ou uma combinação destes eventos), diz-se que o indivíduo apresenta
hipoglicemia. Durante um episódio de hipoglicemia, pode haver comprometimento do funcionamento cerebral em vários níveis sucessivos, e até resultar em coma ou morte. Quando a
glicemia abaixa de 70 mg/dl, já ocorre um decréscimo na secreção de insulina. Para concentrações de glicose inferiores a cerca de 60 mg/dl, ocorre um aumento na secreção de glucagon
e adrenalina, sendo que ocorre diminuição no nível de consciência se o estado hipoglicêmico
superar o limite de cerca de 50 mg/dl. Principalmente a partir deste ponto, pode ocorrer insuficiência de glicose para o funcionamento adequado do sistema nervoso central, podendo haver
comprometimento importante do funcionamento cerebral. Portanto, esta manifestação aguda é
altamente indesejável, e o estado hipoglicêmico deve ser sempre evitado ou, ao menos, rapidamente controlado. Para isto, podem ser adotadas algumas soluções: ingestão de nutrientes com
alta quantidade de carboidratos, infusão intravenosa de glicose ou mesmo infusão de glucagon
(intravenoso ou intramuscular) (LOPES, 2002; PUPO, 1984).
Por outro lado, quando existe pouca absorção celular de glicose ou alta produção endógena (ou os dois eventos), situação que é ainda acentuada na fase pós-prandial, e a concentração
de glicose plasmática atinge valores superiores a 140 mg/dl, diz-se que o indivíduo apresenta
hiperglicemia. Neste caso pode-se ter como resultado agudo importante a cetoacidose, que pode
levar o paciente ao coma e à morte. Porém, mesmo quando a hiperglicemia não atinge valores
que desencadeiam o estado de cetoacidose provocada, com o tempo, várias manifestações crônicas tornam-se perceptíveis. Ao quadro de hiperglicemia está associado o quadro patológico
do diabetes mellitus (LOPES, 2002; PUPO, 1984). Em pessoas hígidas, a concentração sanguínea de glicose é mantida dentro de limites muito estreitos, em geral na faixa de 70 a 100 mg/dl
(normoglicemia).
A importância da manutenção da glicemia dentro destes limites deve-se ao fato da
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
32
glicose ser o único nutriente usado, normalmente, pelo cérebro e pelas células vermelhas do
sangue (GANONG, 1977). Quando a glicemia efetivamente cai em demasia, para a faixa de 20 a
50 mg/dl, ocorrem sintomas de choque hipoglicêmico, caracterizado por irritabilidade nervosa
e progressiva que leva a desfalecimento, convulsões e mesmo coma (GUYTON; HALL, 1998).
2.4 Diabetes mellitus
Nesta seção será discutido o conceito do diabetes mellitus, a classificação atualmente
preconizada pela Organização Mundial de Saúde, seu diagnóstico, sua prevalência, complicações associadas e, por fim, as insulinoterapias em âmbito clínico no Brasil.
2.4.1 Conceito
O diabetes mellitus é uma síndrome de etiologia múltipla decorrente da deficiência
total ou parcial na secreção de insulina pelo pâncreas, ou da incapacidade da insulina exercer
adequadamente seus efeitos, ou de ambos os fatos. Caracteriza-se basicamente por uma hiperglicemia crônica com distúrbios no metabolismo dos carboidratos, lipídios e proteínas (SBD,
2000). As conseqüências da moléstia a longo prazo incluem danos, disfunção e falência de
vários órgãos, especialmente rins, olhos, nervos, coração e vasos sanguíneos. Com freqüência
os sintomas clássicos (perda inexplicada de peso, polidipsia e poliúria) estão ausentes, porém
poderá existir hiperglicemia de grau suficiente para causar alterações funcionais patológicas por
um longo período antes que o diagnóstico seja estabelecido (PUPO, 1984; GANONG, 1977).
Segundo Guyton e Hall (1998), a maioria das características patológicas do diabetes
mellitus pode ser atribuída aos três principais efeitos da falta de insulina no organismo, a saber:
(1) menor utilização de glicose pelas células corporais, com conseqüente elevação da concentração de glicose sanguínea; (2) aumento acentuado da mobilização de gordura para as áreas
de armazenamento, produzindo metabolismo lipídico anormal e também o depósito de lipídios
nas paredes vasculares, levando à aterosclerose; (3) diminuição da síntese e aumento no fracionamento de proteínas ocasionando, geralmente, uma diminuição da capacidade do organismo
combater infecções e de regenerar tecidos lesados (SPENCE, 1991).
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
33
2.4.2 Classificação
A classificação do diabetes dellitus, atualmente preconizada pela Organização Mundial
de Saúde e adotada pela Sociedade Brasileira de Diabetes, considera a etiologia e estabelece
quatro divisões principais: diabetes mellitus Tipo 1, diabetes mellitus Tipo 2, diabetes mellitus
Gestacional e Outros Tipos Específicos de diabetes mellitus (SBD, 2000).
Diabetes mellitus Tipo 1: Resulta da destruição das células das ilhotas de Langerhans do pâncreas, podendo ser de natureza auto-imune ou por mecanismos ainda não conhecidos,
geralmente ocasionando deficiência absoluta de insulina.
Diabetes mellitus Tipo 2: Caracterizada por graus variados de resistência à ação da insulina e
deficiência relativa em sua secreção.
Diabetes mellitus Gestacional: Caracterizado pela diminuição da tolerância à glicose, de magnitude variável e diagnosticada pela primeira vez durante a gestação, podendo ou não
persistir após o parto.
Outros Tipos Específicos: Esta categoria inclui vários tipos específicos, decorrentes de defeitos genéticos associados com outras doenças ou com o uso de fármacos diabetogênicos.
2.4.3 Estágios de tolerância à glicose e diagnóstico
A evolução para a hiperglicemia mantida ocorrerá ao longo de um período de tempo
variável, passando por estágios intermediários que recebem as denominações de glicemia de
jejum alterada e tolerância à glicose diminuída cujos critérios de diagnósticos estão sintetizados
na tabela 2.1.
Os procedimentos de diagnósticos empregados são a medida da glicose no soro ou no
plasma após jejum de 8 a 12 horas e o teste padronizado de tolerância à glicose oral (TTGO)
após a administração de 75,0 g de glicose anidra (ou dose equivalente, por exemplo, de 82,5 g
de Dextrosol) por via oral, com medidas de glicose no soro ou plasma nos instantes 0 e 120 min
após a ingestão (SBD, 2000).
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
34
Tabela 2.1: Valores de glicose plasmática (mg/dl) para diagnóstico de diabetes mellitus e seus
estágios pré-clínicos (SBD, 2000)
Categorias
Glicemia de jejum alterada
Tolerância à glicose diminuída
Diabetes mellitus
Jejum
> 110 e < 126
< 126 e
≥ 126 ou
TTGO 75g
< 140 se realizada
≥ 140 e < 200
> 200 ou
Casual4
≥ 200
2.4.4 Prevalência
No mundo, o diabetes mellitus possui uma elevada taxa de prevalência, geralmente
variando entre 5 e 10%, dependendo da população considerada. No Brasil, a taxa de prevalência
média nacional é de 7,6%, variando entre 5,22% em Brasília e 9,66% em São Paulo (SBD, 2000).
Do total de casos, a freqüência relativa do diabetes tipo 2 fica na faixa de 80 a 90% dos
casos, enquanto que o diabetes tipo 1 corresponde a 10 − 20% dos casos (SBD, 2000).
2.4.5 Complicações agudas e crônicas
As principais complicações que podem ocorrer a um paciente diabético podem ser
agudas, manifestando-se em um curto espaço de tempo (de horas ou dias), e iniciadas por
quadros extremos de desregulação glicêmica, ou crônicas, aparecendo tipicamente após anos
de hiperglicemia moderada.
Dentre as complicações agudas as principais são o coma hipoglicêmico, a cetoacidose
diabética e o estado hiperosmolar não-cetótico. Por outro lado, as principais complicações
crônicas são a nefropatia (comprometimento renal), a retinopatia (comprometimento da microcirculação da retina), a neuropatia e as doenças cardio-pulmonares e vasculares periféricas.
2.4.6 Insulino terapias convencionais
Atualmente, o paciente diabético insulino-dependente (tipo-1) pode seguir uma terapia
insulínica convencional ou intensiva (LOPES, 2002).
Insulinoterapia convencional: O regime terapêutico convencional aplicado hoje em
dia corresponde ao que seria a mínima dose diária de insulina para um razoável controle glicêmico. A dose inicial é escolhida na faixa de 0,2 a 1,2 U/(kg.dia).
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
35
Insulinoterapia intensiva: O regime terapêutico intensivo conta com ao menos 3
injeções diárias de insulina.
2.5 Modelos matemáticos da dinâmica da regulação do metabolismo dos carboidratos
Na literatura especializada, encontra-se disponível uma grande variedade de modelos
matemáticos da dinâmica da regulação do metabolismo dos carboidratos em diversos níveis de
complexidade e acurácia. Estão descritos desde modelos simples, construídos apenas a partir
de dados experimentais, entrada/saída, sem a preocupação de representar mecanismos bioquímicos, mas sim representar parâmetros globais (BOLIE, 1961; ACKERMAN et al., 1965), até
os chamados modelos compreensivos, mais detalhados e que tentam reproduzir os processos
bioquímicos básicos, ou pelos menos os processos metabólicos com maior nível de detalhes,
sendo, em geral, utilizados como modelos de simulação. São exemplos de modelos compreensivos os modelos elaborados por Lopes (2002), Puckett (1992) e Sorensen (1985). Uma revisão
detalhada dos diversos tipos de modelos do sistema endócrino-metabólico de regulação da glicemia pode ser encontrada em (LOPES, 2002).
Neste trabalho serão apresentados, resumidamente, apenas os modelos de simulação
da dinâmica da regulação do metabolismo da glicose em uma pessoa hígida, denominado modelo fisiológico; em uma pessoa diabética tipo I metabolicamente normalizada, denominado
modelo patológico normalizado ambos desenvolvidos por Sorensen (1985); e em uma pessoa diabética tipo I metabolicamente não-normalizada, denominado modelo patológico nãonormalizado, que, por sua vez, foi obtido variando-se os parâmetros nominais do modelo patológico de Sorensen (1985).
Nestes modelos, conforme mencionado anteriormente, foi admitido que apenas a glicose, a insulina e o glucagon influenciam a dinâmica modelada.
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
36
2.5.1 Modelo fisiológico: pessoa hígida
Os modelos fisiológico e patológico elaborados por Sorensen (1985) têm características de modelo compreensivo, ou isomórfico da fisiologia, onde se tenta reproduzir alguns dos
principais processos elementares envolvidos na fisiologia da regulação da glicemia, considerando uma descrição anatômica compartimental.
Por descrição anatômica compartimental deve-se entender que, baseado no conhecimento da anatomia humana, o organismo foi dividido em regiões (compartimentos) onde a
concentração de cada substância considerada (glicose, insulina ou glucagon) podia ser admitida
constante 5 . Feita a divisão do corpo humano em compartimentos foram determinados os diagramas compartimentais para cada substância: o diagrama compartimental do submodelo da
glicose é mostrado na figura 2.2; o do submodelo da insulina na figura 2.3; e o do glucagon na
figura 2.4. Em seguida, foram escritas as equações de conservação de massa para cada compartimento conforme ilustrado pelos pares: figura 2.5(a) e equação (2.1); figura 2.5(b) e equações
(2.2) e (2.3). Tais equações serão discutidas a seguir.
Na figura 2.5(a), CBi e CBo representam, respectivamente, as concentrações da substância considerada (glicose, insulina ou glucagon) no fluxo de entrada e saída; VB e QB representam, respectivamente o volume de distribuição da substância no compartimento considerado
e o fluxo (unidade de volume por min) da substância através do compartimento; ri e ro representam, respectivamente, uma fonte e um sorvedouro metabólicos da substância considerada.
A equação (2.1) representa, portanto, a equação de balanço de massa da substância considerada
no compartimento em questão
ro
ri
QB
dCBo
−
(CBi − CBo ) +
=
VB VB
VB
dt
(2.1)
Na figura 2.5(b), assim como na figura 2.5(a), CBi e CBo representam,respectivamente,
as concentrações da substância no fluxo de entrada e saída no compartimento considerado; QB
representa o fluxo (unidade de volume por min) da substância através do compartimento; ri e
ro representam, respectivamente, uma fonte e um sorvedouro metabólicos da substância con5
Maiores detalhes sobre modelagem compartimental podem ser encontrados, por exemplo, em (COBELLI;
1998; COBELLI et al., 1984)
CAUMO,
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
37
CÉREBRO
G
GBV V
QB
G
BV
G
GBI V BI
G
TB
r BGU
G
CORAÇÃO E
PULMÕES
QH
G
GH V H
r RBCU
Artéria Hepática
FÍGADO
GL V
r HGP
G
L
Q
G
A
Q
G
G
TRATO
GASTRINTESTINAL
GG V
r HGU
G
QG
G
G
Veia Porta
r OGA
RINS
r GGU
G
G
GK V K
QK
r KGE
PERIFERIA
G
G
QP
GPV V PV
G
GPI V PI
G
TP
r PGU
Figura 2.2: Representação esquemática dos compartimentos do submodelo da glicose
siderada. Este compartimento, entretanto, foi dividido em dois subcompartimentos, visando
a modelar regiões em que a transferência da substância do fluxo sanguíneo para o líquido intersticial tinha atraso não desprezível. Desta forma, VB e VI representam, respectivamente,
os volumes de distribuição da substância considerada no sangue e no líquido intersticial; CI
representa a concentração da substância no líquido intersticial. A transferência da substância
considerada entre o sangue e o líquido intersticial de um mesmo compartimento foi modelada
por um sistema de primeira ordem com constante de tempo T . As equações (2.2) e (2.3) são,
respectivamente, as equações de balanço de massa para o subcompartimento sanguíneo e o
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
38
CÉREBRO
I
IB V
Q
I
H
I
B
QB
CORAÇÃO E
PULMÕES
I
IH V H
r IVI
Artéria Hepática
FÍGADO
IL V
rPIR
Q
I
L
TRATO
GASTRINTESTINAL
I
A
I
IG V
rLIC
I
G
Q
I
G
QG
Veia Porta
RINS
IK V
I
K
I
QK
rKIC
PERIFERIA
I
I
QP
IPV VPV
I
IPI V PI
I
TP
rPIC
Figura 2.3: Representação esquemática dos compartimentos do submodelo da insulina
subcompartimento intersticial do compartimento considerado:
VI
QB
dCBo
(CBo − CI )
(CBi − CBo ) −
=
VB T
VB
dt
(2.2)
ro
ri
1
dCI
−
= (CBo − CI ) +
VI
VI
T
dt
(2.3)
Como para cada substância (glicose, insulina e glucagon) os compartimentos foram
considerados diferentes (as regiões onde as substâncias poderiam ser consideradas homogeneamente distribuídas são diferentes), cada um dos modelos acima (patológico ou fisiológico) é,
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
N
* V
rP*R
39
*
rP*C
Figura 2.4: Representação esquemática dos compartimentos do submodelo do glucagon
QB, CBi
QB, CBi
QB, CBo
CBo VB
QB, CBo
CBo VB
ri
CI VI
ro
(a)
ri
T
ro
(b)
Figura 2.5: Definição dos compartimentos empregados nos modelos de Sorensen (1985)
na realidade, composto de 3 submodelos: o submodelo da glicose, o submodelo da insulina e o
submodelo do glucagon. Tais submodelos são acoplados entre si pelas taxas metabólicas (ver,
nas tabelas 2.2, 2.3 e 2.4, que algumas fontes e sorvedouros de um submodelo dependem de
concentrações de algumas substâncias de outro submodelo).
No apêndice A, na página 104, são apresentadas todas as equações do modelo fisiológico derivadas de acordo com: os diagramas esquemáticos dos submodelos da glicose (figura
2.2), da insulina (figura 2.3) e glucagon (figura 2.4); o significado do compartimento da figura 2.5(a) representado pela equação de balança de balanço de massa (2.1); e o significado do
compartimento da figura 2.5(b) dado pelas equações de balanço de massa (2.2) e (2.3).
O modelo fisiológico resultante é constituído por 22 equações diferenciais ordinárias
(formulação a parâmetros concentrados) não-lineares, das quais 11 estão associadas ao modelo
da glicose (ver figura 2.2), 10 estão associadas ao modelo da insulina, das quais 3 descrevem
a secreção pancreática, (ver figura 2.3) e uma equação refere-se ao modelo do glucagon (ver
figura 2.4).
Os processos fisiológicos responsáveis pelas fontes e sorvedouros metabólicos no submodelo da gliocose são resumidos na tabela 2.2; os responsáveis pelas fontes e sorvedouros no
submodelo da insulina são resumidos na tabela 2.3; e os do submodelo da insulina são apresentados na tabela 2.4.
As tabelas 2.5, 2.6 e 2.7 definem as taxas metabólicas presentes, respectivamente, nos
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
40
Tabela 2.2: Resumo dos processos fisiológicos que definem as fontes e sorvedouros metabólicos no modelo da glicose
Processo é
Taxa é função de
Processo Fisiológico
Sorvedouros
Constante
Consumo nas células vermelhas
Consumo no cérebro
Constante
Consumo no trato grastrintestinal
Constante
Consumo na periferia
Glicose no líquido intersticial da periferia
Insulina no líquido intersticial da periferia
Linear
Não-linear
Excreção pelos rins
Glicose nos rins
Não-linear
Consumo no fígado
Glicose no fígado
Insulina no fígado
Não-linear
Não-linear
Glicose no fígado
Insulina no fígado
Glucagon no plasma
Não-linear
Não-linear
Não-linear
Fontes
Produção no fígado
Tabela 2.3: Resumo dos processos fisiológicos que definem as fontes e sorvedouros metabólicos no modelo da insulina
Processo é
Taxa é função de
Processo Fisiológico
Sorvedouros
Linear
Insulina do fígado
Degradação no fígado
Degradação nos rins
Insulina nos rins
Linear
Degradação na periferia
Insulina no líquido intersticial da periferia
Linear
Glicose no coração e pulmões
Não-linear
Fontes
Liberação pelo pâncreas
Tabela 2.4: Resumo dos processos fisiológicos que definem as fontes e sorvedouros metabólicos no modelo do glucagon
Processo é
Taxa é função de
Processo Fisiológico
Sorvedouros
Linear
Glucagon no plasma
Degradação no plasma
Fontes
Liberação pelo pâncreas
Glicose no coração e pulmões
Insulina no coração e pulmões
Não-linear
Não-linear
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
41
Tabela 2.5: Definição das fontes e sorvedouros metabólicos do submodelo da glicose
Sorvedouros:
Taxa de utilização de glicose pelas células vermelhas do sangue
rRBCU
Taxa de utilização de glicose no cérebro
rBGU
Taxa de utilização de glicose no trato gastrintestinal
rGGU
Taxa de utilização de glicose na periferia
rP GU
Taxa de excreção de glicose pelos rins
rKGE
Taxa de utilização de glicose no fígado
rHGU
Fontes:
Taxa de produção hepática de glicose
rHGP
Taxa de absorção de glicose no trato gastrintestinal
rOGA
Tabela 2.6: Definição das fontes e sorvedouros metabólicos do submodelo da insulina
Sorvedouros:
Taxa da degradação de insulina no fígado
rLIC
Taxa da degradação da insulina nos rins
rKIC
Taxa da degradação da insulina na periferia
rP IC
Fontes:
Taxa de liberação pancreática de insulina
rP IR
Taxa de infusão intravenosa de insulina
rIV I
diagramas do submodelo da glicose (ver figura 2.2), do submodelo da insulina (ver figura 2.3)
e do submodelo do glucagon (ver figura 2.4).
Ainda nos diagramas esquemáticos de cada submodelo, as variáveis dentro de cada
compartimento representam, respectivamente, a concentração da substância do submodelo considerado e o seu volume de distribuição naquele compartimento.
Dentre as principais limitações deste modelo podem ser citadas:
• Efeitos dos hormônios epinefrina (adrenalina), cortisol e hormônio do crescimento não
são levados em consideração. Segundo Ganong (1977) variações diárias normais destes
hormônios influenciam a regulação da glicemia. Estes potentes hormônios antagônicos
à ação da insulina podem, entretanto, provocar estados de hiperglicemia (estimulando a
produção de glicose no fígado e induzir resistência à insulina) em níveis associados a
Tabela 2.7: Definição das fontes e sorvedouros metabólicos do submodelo do glucagon
Sorvedouro:
Taxa de degradação do glucagon
rM ΓC
Fonte:
Taxa de liberação pancreática de glucagon
rP ΓR
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
42
vários estados de doenças, estresse e traumas.
• A impossibilidade de simulação de uma refeição mista; variações pós-prandiais nos níveis
de circulação destes substratos podem interferir com a homeostase da glicose alterando a
secreção pancreática de hormônios e influenciando o metabolismo no fígado. Na absorção
apenas de glicose o efeito dos aminoácidos e dos ácidos graxos não são significativos na
homeostasia do metabolismo da glicose (GUYTON; HALL, 1998; GANONG, 1977).
• Condições iniciais do modelo refletem apenas o metabolismo normal (basal) no estado
pós-prandial. Mudanças na velocidade do metabolismo associadas a estados prolongados de jejum, como depleção do glicogênio hepático e alteração na utilização de glicose
cerebral não foram modeladas (SORENSEN, 1985).
• Os volumes de distribuição e fluxo sanguíneo são fixos e representativos de um homem
de 70 kg.
2.5.2 Modelo patológico normalizado: paciente diabético tipo I metabolicamente normalizado
O modelo da dinâmica da regulação da glicemia em um paciente diabético, metabolicamente normalizado, desenvolvido por Sorensen (1985) usa o mesmo conjunto de equações
obtido para a pessoa hígida. A diferença foi a remoção da liberação pancreática de insulina6 do
modelo da pessoa hígida fazendo-se:
rP IR = 0.
(2.4)
Por ter sido admitido que o paciente diabético tinha as mesmas fontes e sorvedouros metabólicos que uma pessoa hígida, o modelo obtido foi chamado de modelo patológico
metabolicamente normalizado, sendo representativo de um paciente diabético tipo I metabolicamente normalizado. Dentre as limitações deste modelo destaca-se o não modelamento da
6
Conforme descrito anteriormente, o modelo da liberação de insulina pelo pâncreas empregado por Sorensen
(1985) é de 3a ordem. Assim, com a remoção da liberação pancreática de insulina, a ordem do modelo reduz de
22a para 19a .
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
43
resistência à ação insulínica geralmente presente em pacientes diabéticos.
2.5.3 Modelo patológico não-normalizado: paciente diabético tipo I metabolicamente não-normalizado
O modelo da dinâmica da regulação da glicemia em um paciente diabético tipo I, metabolicamente não-normalizado, foi obtido considerando-se variações nos parâmetros nominais
do modelo patológico normalizado conforme descrito a seguir.
Das equações mostradas no apêndice A, página 104, têm-se que as fontes e sorvedouros metabólicos de cada submodelo são modelados por funções, ou produto de funções, do
tipo:
ri = Ei {Ai + Bi tanh [Ci (xi + Di )]}
(2.5)
Parker et al. (2001) e Parker et al. (2000) mostraram que de todos os parâmetros Ei ,
Ai , Bi , Ci e Di , representativos de distúrbios metabólicos, comumente associados ao diabetes
mellitus, os mais significativos são:
• Parâmetro D do MPI GU (efeito da insulina na taxa de utilização de glicose na periferia,
ver equação (A.28) na página 107)
G
• Parâmetro E do MHGP
(efeito da glicose na taxa de produção hepática de glicose, ver
equação (A.19) na página 106)
Foi verificado, ainda, por Parker et al. (2001) e Parker et al. (2000), que dos demais
parâmetros do modelo o parâmetro FLIC (parâmetro que define a degradação de insulina no
fígado, ver equação (A.37) na página 108) também era bastante representativo na simulação de
distúrbios metabólicos, geralmente associados ao diabetes mellitus.
A tabela 2.8 resume os valores nominais dos parâmetros acima considerados, bem
como a faixa de variação destes parâmetros, representativos dos distúrbios metabólicos geralmente associados ao diabetes.
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
44
Tabela 2.8: Definição da faixa de variação dos parâmetros representativos de distúrbios metabólicos associados ao diabetes mellitus
Faixa de Variação
Parâmetro Nominal
I
−5,82 ±50% em torno de −5,82
D de MP GU
G
±50% em torno de 1,0
1,0
E de MHGP
±20% em torno de 0,4
0,40
FLIC
2.6 Modelo matemático da absorção de glicose no trato gastrintestinal
Neste trabalho será empregado o modelo da absorção de glicose no trato gastrintestinal apresentado em (LEHMANN; DEUTSCH, 1992). Neste modelo a absorção de glicose no
intestino é modelada como sendo a resposta de um sistema de primeira ordem a uma entrada triangular, quando a quantidade de carboidratos na alimentação é menor que 10 g, ou trapezoidal,
quando a quantidade de carboidratos é maior ou igual a 10 g, como ilustrado na figura 2.6.
As equações do modelo de absorção de (LEHMANN; DEUTSCH, 1992) são:
dθ
= Gemp − kgabs θ
dt
(2.6)
rOGA = kgabs θ
(2.7)
onde Gemp é mostrado na figura 2.6(a) quando a quantidade de carboidratos na refeição (Qc ) é
menor que 10 g e, na figura 2.6(b), quando a quantidade de carboidratos na refeição (Qc ) é maior
ou igual a 10 g; rOGA (mg/mim) é, conforme mencionado anteriormente, a taxa de absorção de
glicose no trato gastrintestinal (ver tabela 2.5); Vmax e kgabs são parâmetros do modelo dados,
respectivamente, por: 360,0 mg/min, e
1
60,0
min−1 .
No caso em que a quantidade de carboidratos na refeição é menor que 10 g (ver figura
2.6(a)), tem-se
Qc
Vmax
Qc
=
Vmax
Tasc =
Tdes
(2.8)
CAPÍTULO 2. REGULAÇÃO DO METABOLISMO DOS CARBOIDRATOS
45
onde Qc é dado em mg.
Já no caso em que a quantidade de carboidratos na refeição é maior ou igual a 10 g
(ver figura 2.6(b)), tem-se ainda:
Tasc = 30,0 min
Tdes = 30,0 min
¤
£
Qu − 12 Vmax (Tasc + Tdes )
Tmax =
Vmax
(2.9)
onde Qu é dado em mg.
Gempt
Gempt
Vmax
Vmax
Tasc Tdes
t
(a) Quantidade de carboidrato na alimentação menor que 10 g.
Tasc
Tmax
Tdes
t
(b) Quantidade de carboidrato na alimentação é
maior ou igual a 10 g.
Figura 2.6: Definição das entradas do modelo da absorção de glicose no trato gastrintestinal de
Lehmann e Deutsch (1992)
Capítulo 3
Controle Preditivo
Neste capítulo serão discutidas brevemente as idéias básicas que estão presentes nas
mais diversas estratégias de controle preditivo. Em seguida, será detalhada a estratégia de controle preditivo generalizado, em sua versão não-adaptativa, para um sistema com uma entrada e
uma saída, nos casos com e sem restrições (limitação da amplitude do sinal de saída, limitação
da variação do sinal de controle e limitação na amplitude do sinal de controle).
3.1 Introdução
O termo controle preditivo não se refere a uma estratégia específica, mas a um conjunto
amplo de técnicas que possuem algumas idéias em comum (CAMACHO; BORDONS, 2000),
ilustradas na figura 3.1 e discutidas a seguir.
Nas diversas estratégias de controle preditivo, em cada instante de amostragem k, o
algoritmo de controle recebe novas leituras das saídas medidas do sistema e, baseado nesta informação e no modelo do processo empregado explicitamente no algoritmo de controle, calcula
uma seqüência de ações futuras de controle que minimizam uma certa função custo. Empregase, então, a estratégia do horizonte móvel, onde apenas a primeira ação de controle calculada é
implementada até o próximo instante de amostragem, quando todo o processo é repetido baseado nas novas informações medidas (ROSSITER, 2003; CAMACHO; BORDONS, 2000; GLAD;
LJUNG, 2000; SOETERBOEK, 1992).
A principal razão para a utilização do horizonte móvel é a possibilidade que esta es-
CAPÍTULO 3. CONTROLE PREDITIVO
PASSADO
47
FUTURO
Referência
Saídas preditas: ŷ(k j | k )
y(k )
Ações de controle: u(k)
k-2
k-1
k
k+1
k+2
k+Nu
k+j
k+N2
Figura 3.1: Representação esquemática do princípio geral seguido pelas diversas estratégias de
controle preditivo
tratégia oferece para a rejeição de perturbações futuras e/ou correção de erros de modelagem.
Assim, se a saída predita do processo no instante k, ŷ(k + 1|k), não for igual à saída medida do
processo no instante k + 1, y(k + 1), esta diferença tenderá a ser corrigida pela realimentação.
Além disso, no instante k + 1, as próximas predições serão feitas a partir das saídas medidas do
processo e não a partir da saída predita, utilizando um modelo interno do processo, no instante
anterior. O resultado da aplicação da abordagem do horizonte móvel é que o horizonte sobre o
qual a saída do processo é predita é deslocado um instante de amostragem na direção do futuro,
a cada instante de amostragem (SOETERBOEK, 1992).
Em cada instante k, calcula-se uma seqüência de saídas futuras, ŷ(k + j|k), utilizandose, explicitamente, um modelo do sistema a ser controlado. As saídas futuras calculadas são
função de toda a informação disponível até o instante k, ou seja, saídas do sistema e sinais de
controle passados1 , da seqüência futura de sinais de controle e do modelo do processo empregado no cálculo das predições (SOETERBOEK, 1992).
Calculadas as predições ŷ(k + j|k), determina-se uma seqüência de sinais futuros de
1
Quando, para o cálculo das predições da saída, são utilizadas todas as entradas e saídas disponíveis até o
instante k, a formulação de controle preditivo é dita empregar um modelo realinhado do sistema. Este é o caso,
por exemplo, da estratégia GPC (CLARKE et al., 1987a) empregada neste trabalho. No caso em que as predições
da saída são calculadas empregando-se apenas as entradas passadas, diz-se que o controlador emprega um modelo
independente do sistema (ROSSITER, 2003; MACIEJOWSKI, 2002).
CAPÍTULO 3. CONTROLE PREDITIVO
48
controle que minimizam uma certa função custo dependente das predições ŷ(k + j|k). Cada
estratégia de controle preditivo emprega uma função custo diferente sendo, geralmente, usada
uma função custo quadrática (CAMACHO; BORDONS, 2000). No caso do controlador preditivo
generalizado, a função custo empregada é (CLARKE et al., 1987a):
J=
N2
X
j=N1
2
[ŷ(k + j|k) − w(k + j)] +
Nu
X
δ(j)[4u(k + j − 1)]2
(3.1)
j=1
Na equação (3.1), N1 e N2 são, respectivamente, os horizontes mínimos e máximos
de predição da saída e Nu é o horizonte de controle, que não necessariamente coincide com o
horizonte máximo de predição da saída. O significado de N1 e N2 são intuitivos: eles marcam
os instantes em que é desejável que as saídas preditas, ŷ(k + j|k), sigam a referência futura,
w(k + j). Assim, caso seja escolhido N1 6= 1, isto significa que não são importantes os erros
entre as saídas preditas, ŷ(k + j|k), e a trajetória de referência, w(k + j), nos instantes k +
1, . . . ,k + N1 . Por exemplo, no caso de sistemas com atraso d não há necessidade que N1 seja
menor que d porque a ação de controle atual não terá efeito na saída da planta até o instante
k + d + 1. Também, se o processo é de fase não mínima, este parâmetro permitirá que os
instantes iniciais da resposta inversa não sejam levados em consideração para a determinação
da seqüência futura de sinais de controle (CAMACHO; BORDONS, 2000). Quanto à seqüência
de pesos δ(j), ela é, geralmente, considerada constante δ(j) = δ, j = 1, . . . ,Nu . Pode-se,
entretanto, considerá-la variável, por exemplo, diminuindo com o tempo, indicando um peso
maior para os erros nos instantes iniciais que para os finais.
Um ponto que chama a atenção na função custo da equação (3.1) é o uso da variação
dos sinais de controle futuros, 4u(k+j), j = 1, . . . ,Nu , ao invés dos próprios sinais de controle
futuros, u(k + j), j = 1, . . . ,Nu . A idéia ao se considerar a variação do sinal de controle é
introduzir uma ação integral na malha de controle fazendo com que o erro de regime para uma
referência constante, no caso em que não existam restrições ativas, seja nulo (MACIEJOWSKI,
2002). O algoritmo de controle calcula 4u(k) mas aplica à planta u(k). Como
4u(k) = u(k) − u(k − 1)
(3.2)
CAPÍTULO 3. CONTROLE PREDITIVO
49
que no domínio transformado z é
4U (z) = (1 − z −1 )U (z)
(3.3)
z
U (z)
=
z−1
4U (z)
(3.4)
ou, equivalentemente,
tem-se que é introduzida uma ação integral na malha de controle.
Neste trabalho, restringir-se-á ao estudo do controle preditivo generalizado (CLARKE
et al., 1987a, 1987b), descrito na seção seguinte, para sistemas com uma entrada e uma saída
(SISO), em sua versão não adaptativa.
Existe uma vasta literatura, entre artigos e livros, dedicada à teoria e aplicação das
várias vertentes relacionadas ao controle preditivo. Para uma introdução mais compreensível
aos controladores preditivos lineares sugere-se o livro de Rossiter (2003). Outras referências
são os livros de Maciejowski (2002), de Soeterboek (1992) além dos artigos, tipo revisão, de
Rawlings (2000), Morari e Lee (1999) e de Garcia et al. (1989), que são bastante úteis para
situar todas as tendências e estado da arte do MPC. Para um tratamento mais completo sobre
GPC (SISO e MIMO) sugere-se consultar Camacho e Bordons (2000), e suas referências.
3.2 Controle Preditivo Generalizado (GPC)
A estratégia GPC foi proposta por Clarke et al. (1987a), tendo se tornado uma das
estratégias de controle preditivo mais populares tanto na indústria quanto no meio acadêmico
(CAMACHO; BORDONS, 2000). Em diversas aplicações industriais (CLARKE, 1988), os controladores GPC apresentaram bom desempenho e um certo grau de robustez.
Nesta estratégia, o sistema é considerado descrito por um modelo Auto-Regressivo de
Média-Móvel Integrada com entradas Exógenas (ARIMAX do inglês Auto-Regressive Integrated Moving-Average)2 na forma da equação (3.5)
2
Clarke et al. (1987a) utiliza a denominação CARIMA -Controled Auto-Regressive Integrated Moving Average
CAPÍTULO 3. CONTROLE PREDITIVO
A(z −1 ) y(k) = z −d B(z −1 ) u(k − 1) +
50
C(z −1 )
ξ(k)
4
(3.5)
onde ξ(k) é um distúrbio estocástico com E [ξ(i)ξ(j)] = 0, ∀i 6= j e E [ξ(k)] = 0, ∀k, u(k)
e y(k) são, respectivamente, o sinal de controle e a saída da planta, d é o atraso do sistema,
4 = 1 − z −1 , A(z −1 ), B(z −1 ) e C(z −1 ) são os seguintes polinômios no operador atrasador
z −1 .
A(z −1 ) = 1 + a1 z −2 + a2 z −2 + . . . + ana z −na
(3.6)
B(z −1 ) = b0 + b1 z −1 + b2 z −2 + . . . + bnb z −nb
(3.7)
C(z −1 ) = 1 + c1 z −1 + c2 z −2 + . . . + cnc z −nc .
(3.8)
Multiplicando a equação (3.5) por 4 = 1−z −1 pode-se reescrever o modelo do sistema
como:
Ã(z −1 ) y(k) = z −d B(z −1 ) 4u(k − 1) + C(z −1 ) ξ(k)
(3.9)
Ã(z −1 ) = 4A(z −1 ) = ã0 + ã1 z −1 + ã2 z −2 + . . . + +ãna +1 z −(na +1)
(3.10)
onde
com
CAPÍTULO 3. CONTROLE PREDITIVO
51
ã0 = 1
ã1 = a1 − 1
ã2 = a2 − a1
ã3 = a2 − a3
..
.
ãna = ana − ana −1
..
.
(3.11)
ãna +1 = −ana
Neste trabalho, o polinômio C(z −1 ) será considerado C(z −1 ) = 1, ou seja, o distúrbio C(z −1 )ξ(k) = ξ(k) será admitido como sendo branco. As modificações necessárias para
derivar a lei de controle GPC, no caso em que C(z −1 ) 6= 1, são mínimas e podem ser encontradas, por exemplo, em (CAMACHO; BORDONS, 2000; CLARKE et al., 1987b). Embora existam
técnicas de modelagem que computam, segundo um determinado critério, os melhores valores para os parâmetros dos polinômios A(z −1 ), B(z −1 ) e C(z −1 ), no GPC é freqüente tratar
C(z −1 ) = T (z −1 ), com T (z −1 ) sendo um parâmetro de projeto. Isto deve-se ao fato de que
T (z −1 ) tem efeitos diretos na sensitividade da malha podendo, assim, obter melhor desempenho em malha fechada usando o T (z −1 ) diferente do C(z −1 ) (melhor valor estimado segundo
um certo critério) (ROSSITER, 2003; CAMACHO; BORDONS, 2000).
Para implementar o controle preditivo, tendo-se identificado os polinômios A(z −1 )
e B(z −1 ), deve-se então computar uma seqüência de variações futuras do sinal de controle,
4u(k),4u(k+1), . . ., de forma que a saída da planta fique próxima da referência futura w(k+j)
nos instantes dentro do horizonte de interesse (determinado pela escolha de N1 e N2 ). Isto é
obtido minimizando a função custo:
J=
N2
X
j=N1
[ŷ(k + j|k) − w(k + j)]2 +
Nu
X
δ(j)[4u(k + j − 1)]2
(3.12)
j=1
onde ŷ(k + j|k) é a predição da saída do sistema j passos a frente, com base nas informações
até o instante k. Os parâmetros N1 e N2 são os horizontes iniciais e finais de predição da saída
do sistema, Nu ≤ N2 é o horizonte de controle, δ(j) é uma seqüência de pesos e w(k + j) é a
referência para as saídas preditas. Na formulação original de Clarke et al. (1987a), bem como
CAPÍTULO 3. CONTROLE PREDITIVO
52
neste trabalho, a seqüência δ(j) será considerada constante3 igual a δ.
Para realizar a minimização da função custo deve-se, inicialmente, realizar a predição
das saídas futuras ŷ(k + j|k), j = N1 , . . . ,N2 do sistema. Precisa-se, então, calcular:
ŷ(k + j|k) = E [y(k + j)|Hk ], j = N1 , . . . ,N2
(3.13)
Hk = {y(k),4u(k − 1),y(k − 1),4u(k − 2), . . .}
(3.14)
onde
é o conjunto de todas as informações disponíveis até o instante k 4 .
Antes de se derivar uma expressão geral para o cálculo das predições ŷ(k + j|k), j =
N1 , . . . , N2 , será analisado um exemplo numérico. O objetivo deste exemplo é deixar claro os
conceitos envolvidos no cálculo das predições que, caso contrário, podem não ser bem elucidados, quando se realizam as predições utilizando diretamente um conjunto de soluções particulares de uma equação diofantina polinomial (ver apêndice B), como feito em (CAMACHO;
BORDONS, 2000; CLARKE et al., 1987a).
Exemplo 3.1 Considere o seguinte modelo extraído de Camacho e Bordons (2000):
(1 − 1,8z −1 + 0,8z −2 )y(k) = (0,4 + 0,6z −1 )4u(k − 1) + ξ(k)
onde E [ξ(k)] = 0 e E [ξ(i)ξ(j)] = 0
(3.15)
∀ i 6= j.
Deseja-se calcular:
• ŷ(k + 1|k) = E [y(k + 1)|Hk ]
• ŷ(k + 2|k) = E [y(k + 2)|Hk ]
• ŷ(k + 3|k) = E [y(k + 3)|Hk ]
A opção por δ constante é apenas para limitar os graus de liberdade, os parâmetros de sintonia do controlador.
Derivar a lei de controle para o caso de δ(i) não introduz maiores dificuldades sendo possível, assim como no caso
em que δ(i) seja constante, escrever uma solução analítica para o caso sem restrições.
4
Observe que o modelo empregado na formulação de controle preditivo de Clarke et al. (1987a) é estritamente
próprio (GLAD; LJUNG, 2000) e, assim, o sinal de controle no instante k não tem influência na saída da planta no
instante k.
3
CAPÍTULO 3. CONTROLE PREDITIVO
53
em função de Hk , ou seja, das informações sobre sistema até o instante k (ver equação (3.14)),
e das variações futuras do sinal de controle, 4u(k + j), j ≥ 0. Observe que este é justamente
o problema que temos que resolver, no caso geral, para derivar a lei de controle da estratégia
GPC.
Solução: Para calcular ŷ(k + 1|k) substitui-se k por k + 1 na equação (3.15) e,
lembrando que z −1 é o operador atrasador, ou seja, z −n y(k) = y(k − n) e z −n 4u(k) =
4u(k − n), obtém-se:
y(k + 1) = 1,8y(k) − 0,8y(k − 1) + 0,44u(k) + 0,64u(k − 1) + ξ(k + 1)
(3.16)
Aplicando o operador esperança, E [·|Hk ], na equação (3.16) e lembrando que ele é
um operador linear tem-se5 :
ŷ(k + 1|k) = 1,8y(k) − 0,8y(k − 1) + 0,44u(k) + 0,64u(k − 1)
(3.17)
Observe que ŷ(k + 1|k) depende das saídas passadas, y(k) e y(k − 1), da variação
passada do sinal de controle 4u(k − 1) e da variação futura do sinal de controle, 4u(k).
Para o cálculo de ŷ(k + 2|k) procede-se de forma análoga: substitui-se k por k + 2
na equação (3.15) e aplica-se o operador esperança E [·|Hk ], obtendo-se
ŷ(k + 2|k) = 1,8 ŷ(k + 1|k) − 0,8 y(k) + 0,44u(k + 1) + 0,64u(k)
(3.18)
Observe que ŷ(k + 2|k), na equação (3.18), depende de ŷ(k + 1|k), já calculado na
equação (3.17). Substituindo a equação (3.17) na equação (3.18) obtém-se:
ŷ(k +2|k) = 2,44 y(k)−1,44y(k −1)+0,44u(k +1)+1,32 4u(k)+1,08 4u(k −1) (3.19)
5
E [ξ(k + 1)|Hk ] = 0 segue de E [ξ(k)] = 0 e E [ξ(i)ξ(j)] = 0
∀ i 6= j
CAPÍTULO 3. CONTROLE PREDITIVO
54
Procedendo de maneira inteiramente análoga, calcula-se ŷ(k + 3|k):
ŷ(k + 3|k) = 1,8 ŷ(k + 2|k) − 0,8 ŷ(k + 1|k) + 0,4 4u(k + 2) + 0,6 4u(k + 1)
(3.20)
Da equação (3.20), vê-se que para calcular ŷ(k + 3|k) em função das saídas passadas
do sistema, variações passadas do sinal de controle e variações futuras do sinal de controle,
precisa-se, antes, calcular ŷ(k + 1|k) e ŷ(k + 2|k). Substituindo as equações (3.17) e (3.19) em
(3.20) obtém-se:
ŷ(k + 3|k) = 2,952 y(k) − 1,952 y(k − 1) + 0,4 4u(k + 2)
(3.21)
+ 1,32 4u(k + 1) + 2,056 4u(k) + 1,464 4u(k − 1)
Escrevendo as equações (3.17), (3.19) e (3.21) na forma vetorial tem-se:
ŷ(k + 1|k)
ŷ(k + 2|k)
ŷ(k + 3|k)
0
0 4u(k)
0,4
= 1,32 0,4 0 4u(k + 1)
4u(k + 2)
2,056 1,32 0,4
−0,8
0,6
1,8
y(k)
1,08 4u(k − 1)
+
+
2,44
−1,44
y(k − 1)
1,464
2,952 −1,952
(3.22)
Analisando o exemplo numérico 3.1, elucida-se o conceito fundamental utilizado no
cálculo das predições ŷ(k + j|k): calcula-se ŷ(k + 1|k), . . . , ŷ(k + j − 1|k) para determinar
ŷ(k + j|k).
A idéia acima foi usada por Clarke et al. (1987a) de forma menos transparente. Ao
invés de derivar expressões para as predições ŷ(k + j|k) diretamente, utilizando o mecanismo
ilustrado no exemplo 3.1, ou seja, calcular ŷ(k + 1|k), em seguida calcular ŷ(k + 2|k) utilizando ŷ(k + 1|k) e assim por diante, ele considerou um conjunto de soluções particulares da
CAPÍTULO 3. CONTROLE PREDITIVO
55
equação diofantina (3.23) (ver apêndice B, página 115), obtidas recursivamente, para calcular
as predições ŷ(k + j|k), j = N1 , . . . , N2 . É importante ressaltar que tanto o caminho ilustrado
no exemplo 3.1 quanto o caminho seguido por Clarke et al. (1987a) levam às mesmas relações
de recursão: são dois caminhos diferentes para a solução de um mesmo problema6 .
A seguir serão derivadas as relações de recursão para o cálculo das predições utilizandose soluções particulares da equação diofantina polinomial7 (3.23).
Considere a seguinte equação polinomial linear nas incógnitas E(z −1 ) e F (z −1 ):
Ã(z −1 )E(z −1 ) + z −j F (z −1 ) = 1
(3.23)
onde o polinômio Ã(z −1 ) da equação acima é definido pelas equações (3.10) e (3.11). Como
o polinômio de maior grau em z −1 que divide simultaneamente Ã(z −1 ) e z −j , ∀ j ∈ N é
Q(z −1 ) = 1 conclui-se, do teorema 1 apresentado no apêndice B, que a equação (3.23) tem
infinitas soluções.
Considere apenas a solução particular, Ej (z −1 ), Fj (z −1 ) da equação (3.23):
Ej (z −1 ) = ej, 0 + ej, 1 z −1 + . . . + ej, j−1 z −(j−1)
(3.24)
−1
Fj (z ) = fj, 0 + ej, 1 z
−1
+ . . . + ej, na z
−na
obtida impondo-se deg (Ej (z −1 )) = j − 18 .
Substituindo na equação (3.9) k por k + j, com C(z −1 ) = 1, e em seguida multiplicando o resultado por Ej (z −1 ) obtém-se:
Ej (z −1 )Ã(z −1 )y(k + j) = Ej (z −1 )z −d B(z −1 )4u(k + j − 1) + Ej (z −1 )
(3.25)
Rossiter (2003) discute outras formas de obter as predições ŷ(k + j|k) para o algoritmo GPC utilizando
matrizes de Hankel.
7
Caso não se tenha familiaridade com tal equação diofantina polinomial e suas soluções sugere-se ler o apêndice
B, página 115, antes de prosseguir com a leitura deste capítulo
8
No Apêndice B deriva-se, procedendo de maneira análoga ao apresentado em (CLARKE et al., 1987a) um algoritmo recursivo para o cálculos das soluções Ej , Fj , com j = 1, . . . ,N dado o polinômio Ã(z −1 ) e N ∈ N. Um
resumo do algoritmo pode ser encontrado na página 122.
6
CAPÍTULO 3. CONTROLE PREDITIVO
56
Como Ej , Fj é uma solução da equação diofantina (3.23) e, então, pode-se escrever:
Ej (z −1 )Ã(z −1 ) = 1 − z −j Fj (z −1 )
(3.26)
Substituindo (3.26) em (3.25) obtém-se:
[1 − z −j Fj (z −1 )]y(k + j) = Ej (z −1 )z −d B(z −1 )4u(k + j − 1) + Ej (z −1 )ξ(k + j) (3.27)
que pode ser reescrita, lembrando que z −j x(k) = x(k − j), como:
y(k + j) = Fj (z −1 )y(k) + Ej (z −1 )B(z −1 )4u(k + j − d − 1) + Ej (z −1 )ξ(k + j)
(3.28)
Como deg (Ej (z −1 )) = j − 1 tem-se que:
Ej (z −1 )ξ(k + j) = ej, 0 ξ(k + j) + ej, 1 ξ(k + j − 1) + . . . + ξ(k + 1)
(3.29)
e, lembrando que E [ξ(k)] = 0, ∀k e E [ξ(k)ξ(j)] = 0, ∀k 6= j, tem-se que
E [Ej (z −1 )ξ(k + j)|Hk ] = 0.
Assim, aplicando o operador esperança E [·|Hk ] na equação (3.28) obtém-se:
ŷ(k + j|k) = E[y(k + j)|Hk ]
(3.30)
−1
−1
= Fj (z )y(k) + Sj (z )4u(k + j − d − 1)
onde
CAPÍTULO 3. CONTROLE PREDITIVO
57
Sj (z −1 ) = Ej (z −1 )B(z −1 )
(3.31)
= sj, 0 + sj, 1 z
−1
+ . . . + sj, nb +j−1 z
−(nb +j−1)
Analisando a equação (3.30) vê-se que:
• se j < d + 1, ŷ(k + j|k) não depende das variações futuras do sinal de controle podendo
ser calculado a partir das informações disponíveis até o instante k, ou seja, Hk ;
• se j ≥ d + 1, ŷ(k + j|k) depende tanto das variações futuras no sinal de controle
4u(k), 4u(k + 1), . . . , 4u(k + j − d − 1) quanto das informações disponíveis até o
instante k
e é por isso que é interessante escolher N1 ≥ d + 1.
Escrevendo a equação (3.30) na forma vetorial tem-se:
ŷ(k + 1|k)
ŷ(k + 2|k)
..
.
ŷ(k + N |k)
{z
|
=y(k)
f
ŷ (k + 1|k)
ŷ f (k + 2|k)
=
..
.
ŷ f (k + N |k)
{z
} |
=yf (k)
ly
ŷ (k + 1|k)
ŷ ly (k + 2|k)
+
..
.
ŷ ly (k + N |k)
{z
} |
=yly (k)
lu
ŷ (k + 1|k)
ŷ lu (k + 2|k)
+
..
.
ŷ lu (k + N |k)
{z
} |
(3.32)
}
=ylu (k)
onde os vetores yf (k), yly (k), ylu (k) são, respectivamente, dados pelas equações (3.33), (3.34)
e (3.35) escritas a seguir, usando-se a seguinte notação:
• s0 , . . . , sN −d−1 : os N − d primeiros coeficientes do polinômio SN (z −1 )9 ;
• fj, 0 , . . . , fj, na : os coeficientes do polinômio Fj (z −1 ), ver equação (3.24);
• sj, 0 , . . . , sj, nb +j :os coeficientes do polinômio Sj (z −1 ), ver equação (3.31).
Da recursão dos Ej (z −1 ) derivada no apêndice B e da definição dos Sj , ver equação (3.31), é possível concluir
que os j primeiros coeficientes de Sj+1 (z −1 ) são iguais aos j primeiros coeficientes de Sj (z −1 ). Portanto, segundo
a notação empregada, sd+1, 0 = s0 , sd+2, 0 = s0 , sd+2, 1 = s1 , e assim sucessivamente.
9
CAPÍTULO 3. CONTROLE PREDITIVO
58
Neste trabalho, será utilizada a mesma terminologia empregada por (CAMACHO; BORDONS, 2000; CLARKE et al., 1987a) e, assim, o vetor yf (k), ver equação (3.33), será referido
como resposta forçada do sistema, por ser dependente das variações futuras do sinal de controle,
enquanto que o vetor (yly (k) + ylu (k)), ver equações (3.34) e (3.35), será chamado de resposta
livre do sistema, por depender apenas das informações até o instante k (ou seja, depende apenas
de Hk ) e será denotado por f (k).
f
ŷ (k + 1|k)
ŷ f (k + 2|k)
..
.
ŷ f (k + d|k)
ŷ f (k + d + 1|k)
f
ŷ (k + d + 2|k)
f
ŷ (k + d + 3|k)
..
.
ŷ f (k + N |k)
=
|
0
0
0
...
0
..
.
0
..
.
0
..
.
...
..
.
0
0
0
...
s0
0
0
...
s1
s0
0
...
s2
..
.
s1
..
.
s0
..
.
...
..
.
sN −d−1 sN −d−2 sN −d−3 . . .
{z
0
0
0
0
0
0
0
..
.
s0
}
|
4u(k)
4u(k + 1)
4u(k + 2)
..
.
4u(k + N − 1)
}
{z
=4u(k)
=Hf
(3.33)
ly
ŷ (k + 1|k)
ŷ ly (k + 2|k)
..
.
ŷ ly (k + d|k)
ŷ ly (k + d + 1|k)
ly
ŷ (k + d + 2|k)
l
ŷ y (k + d + 3|k)
..
.
ŷ ly (k + N |k)
=
|
f1, 0
f1, 1
...
f2, 0
..
.
f2, 1
..
.
...
...
fd, 0
fd, 1
...
fd+1, 0 fd+1, 1 . . .
fd+2, 0 fd+2, 1 . . .
fd+3, 0 fd+3, 1 . . .
..
..
..
.
.
.
fN, 0
fN, 1 . . .
{z
=Hly
f1, na
f2, na
..
.
fd, na
fd+1, na
fd+2, na
fd+3, na
..
.
fN, na
}
y(k)
y(k − 1)
..
.
y(k − na )
(3.34)
CAPÍTULO 3. CONTROLE PREDITIVO
lu
ŷ (k + 1|k)
ŷ lu (k + 2|k)
..
.
ŷ lu (k + d|k)
ŷ lu (k + d + 1|k)
lu
ŷ (k + d + 2|k)
l
ŷ u (k + d + 3|k)
..
.
ŷ lu (k + N |k)
59
0
0
..
.
sd, 0
= s
d+1, 1
sd+2, 2
sd+3, 3
..
.
sN, N −d
|
...
0
s1, 0
...
s1, nb
...
...
s2, 0
..
.
s2, 1
..
.
...
...
s2, nb +1
..
.
...
sd, d−2
sd, d−1
...
sd, nb +d−1
sd+1, d
...
sd+1, nb +d
. . . sd+1, d−1
...
sd+2, d
sd+2,d+1 . . . sd+2,nb +d+1
. . . sd+3, d+1 sd+3, d+2 . . . sd+3, nb +d+2
..
..
..
..
..
.
.
.
.
.
...
sN, N −2
sN, N −1
{z
...
sN, nb +N −1
4u(k − 1)
..
.
4u(k − d)
4u(k − d + 1)
..
.
4u(k − d − nb )
}
=Hlu
(3.35)
Das equações (3.32), (3.33), (3.34) e (3.35) pode-se escrever:
y(k) = Hf 4u(k) + f (k)
(3.36)
f (k) = yly (k) + ylu (k)
(3.37)
onde
e observar que o vetor y(k) depende de N2 variações futuras do sinal de controle, 4u(k).
Observando a função custo empregada pelo algoritmo GPC
J=
N2
X
2
[ŷ(k + j|k) − w(k + j)] +
j=N1
Nu
X
δ[4u(k + j − 1)]2
(3.38)
j=1
vê-se que ela engloba Nu ≤ N2 variações de controle enquanto que o vetor de predições y(k)
da equação (3.36) depende de N2 variações futuras do sinal de controle. Nos casos em que
Nu < N2 o algoritmo GPC faz com que o vetor de predições y(k) dependa apenas de Nu
variações futuras do sinal de controle impondo-se:
4u(k + Nu ) = . . . = 4u(k + N2 − 1) = 0
(3.39)
CAPÍTULO 3. CONTROLE PREDITIVO
60
Desta forma, o vetor de predições y(k) depende apenas de
4u(k), . . . , 4u(k + Nu − 1).
Considerar a restrição da equação (3.39) equivale a escrever o vetor y(k) como:
y(k) = H̃f 4U (k) + f (k)
(3.40)
onde H̃f é a matriz formada extraindo as N2 − Nu + 1 últimas colunas da matriz Hf , e 4U (k)
é o vetor:
4U (k) =
4u(k)
4u(k + 1)
..
.
(3.41)
4u(k + Nu − 1)
Considere agora o vetor
ŷ(k + N1 |k)
ŷ(k + N1 + 1|k)
Y(k) =
..
.
ŷ(k + N2 |k)
(3.42)
Da definição do vetor Y(k) e da equação (3.40) pode-se, então, escrever:
Y(k) = G4U (k) + fo (k)
(3.43)
onde G e fo (k) são dados, respectivamente, pelas linhas N1 , . . . ,N2 da matriz H̃f e do vetor
f (k).
Usando as definições dos vetores Y(k) e 4U (k) a função custo (3.38) pode ser escrita
como:
J = ||Y(k) − W(k)||22 + δ||4U (k)||22
(3.44)
CAPÍTULO 3. CONTROLE PREDITIVO
61
onde
w(k + N1 )
w(k + N1 + 1)
W(k) =
..
.
w(k + N2 )
(3.45)
O procedimento acima para encontrar o vetor Y(k) será ilustrado por um exemplo
numérico.
Exemplo 3.2 Considere novamente o modelo extraído de Camacho e Bordons (2000):
(1 − 1,8z −1 + 0,8z −2 ) y(k) = (0,4 + 0,6z −1 ) 4u(k − 1) + ξ(k)
}
{z
}
|
{z
|
=Ã(z −1 )
(3.46)
=B(z −1 )
Deseja-se calcular o vetor de predições Y(k), equação (3.43), assumindo N1 = 2,
N2 = 4 e Nu = 3.
Observe que no exemplo em questão tem-se:
• d=0
• na = 1 (lembrar que deg (Ã(z −1 )) = na + 1)
• nb = 1
Utilizando o algoritmo resumido na página 122, fornecendo como entradas:
• N =4
• Ã(z −1 ) = 1 − 1,8z −1 + 0,8z −2
obtém-se
CAPÍTULO 3. CONTROLE PREDITIVO
62
E1 (z −1 ) = 1
F1 (z −1 ) = 1,8 − 0,8z −1
E2 (z −1 ) = 1 + 1,8z −1
F2 (z −1 ) = 2,44 − 1,44z −1
E3 (z −1 ) = 1 + 1,8z −1 + 2,44z −2
F3 (z −1 ) = 2,952 − 1,952z −1
E4 (z −1 ) = 1 + 1,8z −1 + 2,44z −2 + 2,952z −3
F4 (z −1 ) = 3,3616 − 2,3616z −1
(3.47)
como Sj (z −1 ) = Ej (z −1 )B(z −1 ) tem-se
S1 (z −1 ) = 0,4 + 0,6z −1
S2 (z −1 ) = 0,4 + 1,32z −1 + 1,08z −2
(3.48)
−1
S3 (z ) = 0,4 + 1,32z
−1
+ 2,056z
−2
+ 1,464z
−3
S4 (z −1 ) = 0,4 + 1,32z −1 + 2,056z −2 + 2,6448z −3 + 1,7712z −4
Então, pela equação (3.30)
ŷ(k + 1|k) = F1 (z −1 )y(k) + S1 (z −1 )4u(k)
ŷ(k + 2|k) = F2 (z −1 )y(k) + S2 (z −1 )4u(k + 1)
(3.49)
−1
−1
ŷ(k + 3|k) = F3 (z )y(k) + S3 (z )4u(k + 2)
ŷ(k + 4|k) = F4 (z −1 )y(k) + S4 (z −1 )4u(k + 3)
substituindo-se (3.47) e (3.48) em (3.49), tem-se:
CAPÍTULO 3. CONTROLE PREDITIVO
63
ŷ(k + 1|k)
ŷ(k + 2|k)
ŷ(k + 3|k)
ŷ(k + 4|k)
4u(k)
0,4
0
0
0
1,32
4u(k
+
1)
0,4
0
0
=
2,056 1,32 0,4 0 4u(k + 2)
4u(k + 3)
2,6448 2,056 1,32 0,4
0,6
1,8
−0,8
2,44
−1,44
y(k) 1,08
+
+
y(k − 1)
1,464
2,952 −1,952
1,7712
3,3616 −2,6893
(3.50)
4u(k − 1)
Assim, para N1 = 2, N2 = 4 e Nu = 3, da equação (3.50) tem-se que:
ŷ(k + 2|k)
ŷ(k + 3|k)
ŷ(k + 4|k)
{z
|
0,4
0
1,32
= 2,056 1,32 0,4
2,6448 2,056 1,32
}
{z
} |
=Ŷ(k)
=G
−1,44
2,44
+
2,952 −1,952
3,3616 −2,6893
|
4u(k)
4u(k + 1)
4u(k + 2)
{z
|
=U (k)
}
(3.51)
1,08
y(k)
1,464 4u(k − 1)
+
y(k − 1)
1,7712
}
{z
=f (k)
Do exposto até aqui já se sabe como calcular o vetor de predição da saída Y(k), equação (3.42), a partir do modelo ARIX do sistema, e dos parâmetros N1 , N2 e Nu . Precisa-se
agora determinar, a partir de Y(k), o vetor 4U (k), equação (3.41), que minimiza a função
custo da equação (3.44).
3.2.1 Solução do GPC: Caso sem Restrições
No caso em que não são impostas restrições, determinar 4U (k) que minimiza a função custo
CAPÍTULO 3. CONTROLE PREDITIVO
64
J = ||Y(k) − W(k)||22 + δ||4U (k)||22
(3.52)
conhecido o vetor de predições Y(k) é um problema de fácil solução. Basta perceber que
minimizar (3.52) conhecido o vetor Y(k) equivale a minimizar
J = ||G4U (k) + fo (k) − W(k)||22 + δ||4U (k)||22
(3.53)
o que pode ser feito calculando o valor 4U ∗ (k) que anula o gradiende de J em relação à
4U (k). Procedendo assim, encontra-se:
4U ∗ (k) = −(GT G + δI)−1 (f0 (k) − W(k))
(3.54)
Determinado o valor 4U ∗ (k), em cada instante de amostragem, como o controlador
GPC emprega a estratégia do horizonte móvel, apenas o primeiro elemento do vetor 4U ∗ (k) é
utilizado, sendo aplicado o seguinte sinal de controle à planta:
u(k) = u(k − 1) + [1 0 . . . 0]4U ∗ (k)
(3.55)
No próximo instante de amostragem, é calculado um novo vetor 4U ∗ (k) e o processo
é repetido.
3.2.2 Solução do GPC: Caso com Restrições
Neste trabalho, será considerado a possibilidade do sistema estar sujeito às seguintes
restrições:
Limites na amplitude do sinal de saída: y ≤ y(k) ≤ y,
∀k
Limites na variação do sinal de controle: u ≤ u(k) − u(k − 1) ≤ u, ∀k
Limites de amplitude no sinal de controle: U ≤ u(k) ≤ U ,
∀k
A seguir é mostrado, de forma análoga à que foi feita em (CAMACHO; BORDONS,
2000), como as restrições acima podem ser escritas como RU (k) ≤ c (será determinado R e c)
CAPÍTULO 3. CONTROLE PREDITIVO
65
de forma que o problema de otimização a ser resolvido em cada instante de amostragem passa
a ser escrito como:
min
4U (k)
ª
©
kY(k) − W(k)k 22 + δk4U (k)k 22
(3.56)
R4U (k) ≤ c
sujeito a
onde Y(k) é determinado como no caso sem restrições.
O objetivo nesta seção não é estudar as formas de se resolver o problema de programação quadrática acima, mas como reescrever as restrições consideradas, determinando R e c.
Para detalhes sobre os métodos disponíveis para solução de problemas de otimização quadrática
sugere-se consultar (FLETCHER, 1981).
Considere inicialmente o problema de escrever as restrições na amplitude do sinal de
saída, y ≤ y(k) ≤ y, ∀k, como R1 U (k) ≤ c1 .
Como, neste caso, deve-se ter y ≤ y(k) ≤ y, ∀k, naturalmente10
ymin ≤ G4U (k) + fo (k) ≤ ymax
}
{z
|
(3.57)
=Y(k)
que, por sua vez, equivale a
ymax − fo (k)
G
4U (k) ≤
fo (k) − ymin
−G
(3.58)
onde ymax e ymin são vetores com a mesma dimensão de Y(k), ou seja, de dimensão (N2 −
N1 + 1), com todos os elementos iguais a y e a y respectivamente. Da equação (3.58) tem-se
que o R1 e c1 procurados são dados por:
G
R1 =
,
−G
10
ymax − fo (k)
c1 =
fo (k) − ymin
(3.59)
Considera-se aqui, e no resto do trabalho, que um vetor é maior (ou menor) que outro vetor de mesma dimensão
quando cada uma de suas componentes é maior (ou menor) que a componente equivalente no outro vetor.
CAPÍTULO 3. CONTROLE PREDITIVO
66
Considere agora o problema de escrever as restrições na variação do sinal de controle,
u ≤ u(k) − u(k − 1) ≤ u, ∀k, como um R2 U (k) ≤ c2 .
Neste caso, deve-se ter u ≤ u(k) − u(k − 1) ≤ u, ∀k, o que implica que:
umin ≤ 4U (k) ≤ umax
(3.60)
ou, equivalentemente,
umax
I
4U (k) ≤
−umin
−I
(3.61)
onde I é a matriz identidade (Nu × Nu ), umax e umin são vetores com Nu elementos, todos
iguais, respectivamente, a u e u. Da equação (3.61) tem-se que os R2 e c2 procurados são
dados por:
umax
c2 =
−umin
I
R2 =
,
−I
(3.62)
Finalmente, para escrever as restrições na amplitude da variável manipulada como
R3 U (k) ≤ c3 observe que:
u(k + j) =
j
X
4u(k + i) + u(k − 1)
(3.63)
i=0
o que permite escrever, em notação vetorial:
Iu ≤ T4U (k) + Iu(k − 1) ≤ Iu
ou, equivalentemente:
I(u − u(k − 1))
T
4U (k) ≤
I(u(k − 1) − u)
−T
(3.64)
onde T é uma matriz triangular inferior de 1 (os elementos da matriz T acima da diagonal
principal são nulos e os demais 1), I é a matriz identidade (Nu × Nu ). Da equação (3.64) segue,
então, que:
CAPÍTULO 3. CONTROLE PREDITIVO
67
I(u − u(k − 1))
c3 =
)
I(u(k − 1) − u
T
R3 =
,
−T
(3.65)
As restrições (3.58), (3.61) e (3.64) podem, então, serem empilhadas da seguinte
forma:
ymax − f
G
f − ymin
−G
umax
I
u ≤
−umin
−I
I(u
T
max − u(k − 1))
I(u(k − 1) − umin )
−T
(3.66)
A equação (3.66) pode ainda ser escrita simplificadamente como
R4U (k) ≤ c
(3.67)
onde
R1
R=
R2 ,
R3
c1
c=
c2
c3
(3.68)
com R1 e c1 , R2 e c2 e R3 e c3 dados, respectivamente, pelas equações (3.59), (3.62) e (3.65).
Desta forma, encontrar o 4U ∗ (k) que minimiza
J = kY(k) − W(k)k 22 + δk4U (k)k 22
respeitando as restrições
• y ≤ y(k) ≤ y,
∀k
• u ≤ u(k) − u(k − 1) ≤ u,
• U ≤ u(k) ≤ U ,
∀k
∀k
CAPÍTULO 3. CONTROLE PREDITIVO
68
equivale a resolver o seguinte problema de otimização quadrática:
min
4U (k)
ª
©
kY(k) − W(k)k 22 + δk4U (k)k 22
sujeito a
(3.69)
R4U (k) ≤ c
De forma análoga ao caso sem restrições, determinando, em cada instante de amostragem, o vetor 4U ∗ (k) solução de (3.69), como o controlador preditivo emprega a estratégia
do horizonte móvel, apenas o primeiro elemento do vetor 4U ∗ (k) é utilizado sendo, então,
aplicado o seguinte sinal de controle à planta:
u(k) = u(k − 1) + [1 0 . . . 0]4U ∗ (k)
(3.70)
No próximo instante de amostragem, é calculado um novo vetor 4U ∗ (k) e o processo
é repetido.
3.3 Algoritmo da Estratégia GPC: Resumo
A seguir, é apresentada resumidamente a estratégia de controle preditivo generalizado
(GPC), proposta por Clarke et al. (1987a), em sua versão não adaptativa para o caso de um
sistema com uma entrada e uma saída (SISO) descrito por um modelo ARIX:
A(z −1 ) y(k) = z −d B(z −1 ) u(k − 1) +
1
ξ(k)
4
ou equivalentemente,
Ã(z −1 ) y(k) = z −d B(z −1 ) 4u(k − 1) + ξ(k)
onde E [ξ(k)] = 0, ∀k e E [ξ(i)ξ(j)] = 0, ∀i 6= j.
Início do Algoritmo
CAPÍTULO 3. CONTROLE PREDITIVO
69
Entradas: Coeficientes dos polinômios Ã(z −1 ) e B̃(z −1 ), N1 , N2 e Nu
Inicialização:
Passo 1: Calcular os polinômios Ej , Fj usando o algoritmo resumido na página 122.
Para o cálculo deve-se fornecer os coeficientes de Ã(z −1 ) e N2 .
Passo 2: Calcular a matriz G e o vetor fo (k) que definem Y(k), conforme a equação
(3.43) na página 60. Para o cálculo necessita-se do valor de N1 , N2 , Nu , Ej , Fj e B(z −1 ).
Passo 3: Caso existam restrições, calcular a matriz R, conforme as equações (3.66) e
(3.67).
Para cada instante de amostragem:
Passo 1: Ler a saída y(k) do processo.
Passo 2: Calcular o vetor de predições Y(k).
Passo 3: Resolver o seguinte problema de programação quadrática:
min
4U (k)
ª
©
kY(k) − W(k)k 22 + δk4U (k)k 22
sujeito a
(3.71)
R4U (k) ≤ c
Passo 4: Aplicar o sinal de controle à planta
u(k) = u(k − 1) + [1 0 . . . 0]4U ∗ (k)
onde 4U ∗ (k) é a solução do problema de otimização (3.69).
Passo 5: Repetir enquanto o controlador estiver ativo.
(3.72)
Capítulo 4
Metodologia
Neste capítulo serão discutidos os passos seguidos no desenvolvimento do projeto do
controlador preditivo estudado neste trabalho. Inicialmente, será descrito como foram simulados os modelos patológicos e como foi obtido o modelo interno empregado explicitamente no
algoritmo de controle. Em seguida, será descrito como foi resolvido o problema de programação quadrática em cada instante de amostragem. Por fim, será detalhado o processo de sintonia
do controlador (ajuste dos parâmetros N1 , N2 , Nu e δ).
4.1 Simulação dos modelos patológicos
Os modelos patológico normalizado e patológico não-normalizado foram implemenc sendo inicializados admitindo-se o sistema inicialmente em
tados em ambiente Simulink °,
regime.
Em ambos os casos (normalizado e não-normalizado), o estado de equilíbrio do sistema
é dependente da taxa de infusão intravenosa de insulina (rIV I ). Desta forma, dado um valor para
esta taxa determina-se, univocamente, o estado de equilíbrio do sistema.
Em todas as simulações realizadas neste trabalho, os modelos patológicos foram inicializados assumindo-se
rIV I = 22,4 mU/min.
(4.1)
CAPÍTULO 4. METODOLOGIA
71
No caso do modelo patológico normalizado, a taxa de infusão intravenosa de insulina, dada na equação (4.1), denominada daqui por diante por taxa de infusão basal (intravenosa) de insulina, corresponde a uma concentração de glicose no sangue venoso da periferia de
75,0 mg/dl e será referenciada daqui por diante como concentração basal de glicose no sangue
venoso da periferia.
No caso do modelo patológico não-normalizado, a cada conjunto de parâmetros representativos de um distúrbio metabólico (ver tabela 2.8 na página 44) a taxa de infusão basal da
equação (4.1) corresponde a um valor diferente para a concentração basal de glicose no sangue
periférico venoso.
O conjunto de equações diferenciais que descrevem os modelos foi, então, resolvido
c
numericamente utilizando a função ode45 (método Runge-Kutta) do M atlab°
com o passo de
integração máximo de 0,11 . É necessário fazer esta observação pois, nos casos em que não foi
imposto este passo máximo, os resultados obtidos não estavam de acordo com os apresentados
por Sorensen (1985) que, por sua vez, resolveu o problema com um Runge-Kutta de 4a ordem
com passo fixo igual a 0,1.
4.2 Determinação do modelo interno
Para a implementação do controlador GPC (CLARKE et al., 1987a), descrito no capítulo
3, precisa-se, inicialmente, derivar um modelo ARIX
Ã(z −1 ) y(k) = z −d B(z −1 ) 4u(k − 1) + ξ(k)
(4.2)
que relacione a saída medida do sistema, y(k) (desvio em relação a saída em regime), com a
variável manipulada, u(k) (desvio em relação ao valor de regime), quando as demais variáveis
de entrada são nulas.
Neste trabalho a concentração de glicose no sangue venoso da periferia é considerada
a saída medida do sistema enquanto que a taxa de infusão intravenosa de insulina é a variável
manipulada. A entrada não controlada do sistema, o distúrbio, é a taxa de absorção de glicose
1
Valores menores para o passo não alteraram significativamente a solução.
CAPÍTULO 4. METODOLOGIA
72
no trato gastrintestinal (dada pelo modelo de Lehmann e Deutsch (1992)).
Em sua tese de doutorado, Sorensen (1985) apresentou, além dos modelos fisiológico
e patológico discutidos no capítulo 2, um modelo a ser empregado explicitamente no projeto
de um controlador IMC2 para uma bomba de infusão de insulina. Este modelo aproximava a
influência de desvios na taxa basal de infusão de insulina na concentração basal de glicose do
sangue periférico venoso, quando a absorção glicose no trato gastrintestinal era nula, por um
modelo de primeira ordem com atraso:
H(s) =
onde K = −3,0
mg/dl
,
mU/min
K e−ds
αs + 1
(4.3)
α = 90,0 min e d = 10,0 min sendo a saída em regime igual a
75,0 mg/dl e a entrada em regime igual a 22,4 mU/min.
Neste trabalho, os parâmetros do modelo ARIX, equação (4.2), foram derivados a
partir do modelo de primeira ordem com atraso, equação (4.3), apresentado por Sorensen (1985)
conforme descrito a seguir.
Com base em (4.3) e nas aproximações de Padè de 1a , 2a , 3a e 4a ordens
e−ds ≈
e−ds ≈
e−ds ≈
e−ds ≈
1
ds + 1
1 2 2
ds
2
1
+ ds + 1
1
1 3 3
ds
6
1 4 4
ds
24
+
+
1 2 2
ds
2
1 3 3
ds
6
+ ds + 1
1
+ 12 d2 s2 + ds + 1
(4.4)
(4.5)
(4.6)
(4.7)
foram construídos os seguintes modelos:
Modelo 1:
K e−ds
H1 (s) =
αs + 1
2
Internal Model Control (GARCIA; MORARI, 1982).
(4.8)
CAPÍTULO 4. METODOLOGIA
73
Modelo 2:
H2 (s) =
K
(αs + 1)(ds + 1)
(4.9)
Modelo 3:
H3 (s) =
K
(αs +
1)( 12 d2 s2
+ ds + 1)
(4.10)
Modelo 4:
H4 (s) =
(αs +
1)( 16 d3 s3
K
+ 12 d2 s2 + ds + 1)
(4.11)
Modelo 5:
H4 (s) =
K
(αs +
1 4 4
ds
1)( 24
+
1 3 3
ds
6
+ 12 d2 s2 + ds + 1)
(4.12)
Em seguida, foram comparadas as repostas ao degrau unitário dos modelos lineares
Hi (s), i = 1, . . . ,4, com a resposta ao degrau unitário do modelo patológico normalizado (desconsiderando o valor de regime). Esta comparação foi feita considerando-se, para cada modelo
Hi (s), i = 1, . . . ,5, a integral3 do quadrado da diferença entre a sua resposta ao degrau, chamada yi (k), com a resposta ao degrau, sem o valor de regime (basal), do modelo patológico
normalizado.
Dentre os modelos Hi (s), considerou-se, no passo seguinte, apenas aquele que apresentou o menor valor para a integral definida anteriormente, ou seja, foi considerado apenas
aquele cuja resposta ao degrau unitário estava mais próxima da resposta ao degrau unitário do
modelo patológico normalizado.
Por fim, o modelo acima obtido foi discretizado assumindo um segurador de ordem
zero (ZOH)4 na sua entrada. O tempo de amostragem escolhido neste trabalho para a discretização acima, assim como em Parker et al. (1999) e Lopes (2002), foi de 5 min. Esta escolha foi
feita respeitando-se o compromisso entre o tempo de acomodação de 2% do sistema (cerca de
360 min no modelo patológico) (limitante superior) e o atual desenvolvimento tecnológico no
campo de sensores de glicemia (limitante inferior) (GARG et al., 2004; HELLER, 1999; LAGER
c
Para o cálculo desta integral foi utilizado a função trapz do M atlab°
, sendo considerado os limites de
integração suficientemente longos para que todas as respostas ao degrau unitário atingissem a faixa de 2% do valor
final
4
Do inglês Zero Order Hold
3
CAPÍTULO 4. METODOLOGIA
74
et al., 1994).
A principal motivação para a consideração dos modelos H2 (s), . . . , H5 (s), derivados
a partir da equação (4.3), considerando-se aproximações de Padè para o atraso, foi o fato do
modelo patológico normalizado não apresentar, de fato, atraso. Já para o fato de serem consideradas apenas aproximações de Padè em que o grau do numerador é nulo, a motivação foi a
de evitar derivar-se modelos de fase não-mínima o que poderia gerar maiores dificuldades no
ajuste dos parâmetros do controlador (CAMACHO; BORDONS, 2000).
A discretização foi feita assumindo um segurador de ordem zero na entrada e isso foi
motivado pela observação de que, na estratégia de controle preditivo empregada, o sinal de
controle calculado em um instante k era aplicado à planta e não tinha seu valor alterado até o
próximo instante de amostragem k + 1. Além disso, segundo Maciejowski (2002), este é o método de discretização geralmente empregado ao se discretizar modelos para serem empregados
explicitamente em algoritmos de controle preditivo.
4.3 Resolução do problema de programação quadrática
Conforme discutido no capítulo 1, neste trabalho foram consideradas as seguintes restrições na taxa de infusão intravenosa de insulina:
|4uinfudida | ≤ 16,5 mU/min por tempo de amostragem
(4.13)
0 mU/min ≤ uinfudida ≤ 66,25 mU/min
(4.14)
de forma que, conforme discutido na capítulo 3, a cada instante de amostragem deveria ser
resolvido, pelo algoritmo de controle, o seguinte problema de programação quadrática:
min
4U (k)
ª
©
kY(k) − W(k)k 22 + δk4U (k)k 22
sujeito a
(4.15)
R4U (k) ≤ c
onde R e c são determinados a partir de (4.13) e (4.14) usando as equações (3.62) e (3.65).
CAPÍTULO 4. METODOLOGIA
75
Nas simulações numéricas consideradas, a resolução do problema de programação
c Na eventualidade
quadrática (4.15) foi feita utilizando a função quadprog do M atlab°.
de quadprog não encontrar 4U1∗ (k), solução de (4.15), implementou-se, no algoritmo de
controle, a seguinte estratégia: calcular a solução 4U2∗ (k) de (4.15) sem considerar as restrições e, a seguir, determinar o vetor 4U3∗ (k) saturando-se a solução 4U2∗ (k) nos valores
limites impostos pela restrição R ≤ c. O sinal de controle foi, então, determinado empregando
4U3∗ (k). A existência da solução 4U2∗ (k) será discutida no item 4.5.2.
4.4 Índices de desempenho
Conforme discutido no capítulo 1 os parâmetros do controlador projetado foi escolhido
de forma a ter-se um compromisso entre os seguintes requisitos, observados após uma refeição
com uma quantidade pré-determinada de carboidratos:
• minimizar a concentração máxima de glicose no sangue periférico venoso (Gmax );
• maximizar a concentração mínima de glicose no sangue periférico venoso (Gmin );
• minimizar o tempo necessário para que a concentração de glicose no sangue periférico
venoso voltar à faixa dos 2% em torno da concentração de referência (ta );
• minimizar a quantidade de insulina infundida até a concentração voltar à faixa dos 2%
(Qu );
• reduzir as oscilações na concentração de glicose no sangue periférico venoso.5
4.5 Sintonia dos controladores
Naturalmente, existem diversas possibilidades para a escolha dos quatro parâmetros de
projeto, N1 , N2 , Nu e δ, de forma que uma busca exaustiva pelos parâmetros ótimos (segundo
algum critério) pode demandar bastante tempo. Para contornar este problema foi elaborado,
5
A presença de oscilações é avaliada qualitativamente observando-se a resposta temporal para cada conjunto
de parâmetros escolhido.
CAPÍTULO 4. METODOLOGIA
76
com base em uma interpretação intuitiva do significado dos parâmetros, um roteiro de decisões
que permitem simplificar a etapa de sintonia dos controladores.
Em toda a etapa de sintonia será considerado o controlador atuando na regulação da
glicemia, após uma refeição com quantidade pré-fixada de carboidratos, em um paciente diabético metabolicamente normalizado (modelo patológico normalizado). A trajetória de referência
futura w(k + j) (ver equação (3.1) na página 48), será considerada fixa em 0 mg/dl. De fato, a
concentração desejada no sangue periférico venoso (referência) é 75,0 mg/dl, mas w representa
o desvio em relação ao valor em regime.
4.5.1 Escolha de N1
O parâmetro N1 será escolhido como sendo o atraso (d) do modelo interno (a ser
empregado no algoritmo de controle). Isso será feito pois, caso o sistema tenha atraso d, o
sinal de controle no instante k só influenciará as saídas preditas a partir do instante k + d + 1
(CAMACHO; BORDONS, 2000).
4.5.2 Escolha de δ
O parâmetro δ será escolhido analisando-se os autovalores da matriz GT G onde a
matriz G, definida no capítulo 3, é empregada no cálculo do vetor de predições Y(k) (ver
equação (3.43)).
Para entender melhor esta escolha, considere os polinômios característicos das matrizes GT G e (GT G + δI). Analisando tais polinômios conclui-se (ver equação (4.16)) que os
autovalores de (GT G + δI) são iguais aos autovalores de GT G mais δ:
pGT G+δI (λ) = det(λI − GT G − δI)
(4.16)
= det[(λ − δ)I − GT G]
Além disso, da definição de norma euclidiana de um vetor tem-se, para qualquer matriz
G:
CAPÍTULO 4. METODOLOGIA
77
kGxk22 ≥ 0 ∀ x ∈ RNu
(4.17)
xT GT Gx ≥ 0 ∀ x ∈ RNu
(4.18)
ou equivalentemente,
de onde conclui-se que GT G é positiva semi-definida (observe que ela é simétrica) e, portanto,
todos os seus autovalores são maiores ou iguais a zero.
Observe ainda que no caso em que todas as colunas de G são linearmente independentes
Gx = 0 se e somente se x = 0(x ∈ RNu )
(4.19)
de onde conclui-se que, no caso em que as colunas de G são linearmente independentes, GT G
é positiva definida e, portanto, todos os seus autovalores são estritamente positivos. De fato, da
equação (4.19) e novamente da definição de norma euclidiana, tem-se:
kGxk22 > 0 ∀ x ∈ RNu
(4.20)
xT GT Gx > 0 ∀ x ∈ RNu
(4.21)
ou equivalentemente,
Um caso de interesse, em que as colunas de G são todas linearmente independentes,
ocorre quando N1 > d e (N2 − N1 + 1) ≥ Nu (veja a equação (3.33) e definição da matriz G
para perceber que neste caso G tem todas as colunas linearmente independentes).
Do exposto acima tem-se que, caso todas as colunas de G sejam linearmente independentes, a matriz GT G terá todos os seus autovalores positivos e (GT G + δI) será inversível
para ∀δ ≥ 0. Assim, no caso sem restrições, sempre será determinado 4U ∗ (ver equação
(3.54)). Caso as colunas de G não sejam linearmente independentes, a matriz (GT G + δI) será
inversível ∀δ > 0.
CAPÍTULO 4. METODOLOGIA
78
Naturalmente, um aumento no parâmetro δ diminui a velocidade de resposta do sistema, uma vez que serão dados pesos maiores para a variação no sinal de controle e, por conseguinte, o sinal de controle tenderá a variar menos após o aumento do δ. Nos casos em que o
sistema está sujeito a ruídos consideráveis, é particularmente interessante tomar valores “grandes”6 para δ. Neste caso, um aumento em δ diminui a variação, indesejável, de 4u induzida
pelo ruído (ROSSITER, 2003; CAMACHO; BORDONS, 2000).
Neste trabalho, entretanto, os ruídos serão considerados desprezíveis e a limitação na
variação do sinal de controle será imposta pela restrição R4U ≤ c (ver equação (4.15). Por
sempre considerar-se, neste trabalho, N1 > d e N2 ≥ Nu + N1 − 1 (colunas de G linearmente
independentes) de forma que (GT G + δI) será inversível ∀δ ≥ 0 escolher-se-á δ = 0. De fato,
segundo Clarke e Mohtadi (1989), esta é a escolha mais fácil para δ 7 .
4.5.3 Escolha de Nu
O parâmetro Nu será escolhido dentre os valores 1, 2, 3 e 4 conforme descrito a seguir.
Fixado um valor para Nu procede-se com a escolha de N2 (item 4.5.4) armazenando-se,
para cada valor de N2 , os valores dos índices de desempenho descritos na seção 4.4. Em seguida
escolhe-se um novo valor para Nu e repete-se o procedimento anterior. Por fim, comparase todos os valores determinados para os índices de desempenho e escolhe-se o par Nu e N2
que proporcionou o melhor (escolha qualitativa devido à forma de avaliação das oscilações)
compromisso entre os requisitos.
De acordo com Rossiter (2003) o parâmetro Nu deve refletir, de alguma forma, o grau
de acurácia que se espera do modelo. Caso não se tenha um bom modelo do sistema, pode não
ser interessante calcular, em cada instante de amostragem, sinais de controle muitos passos a
frente8 . Clarke e Mohtadi (1989) afirmam que, para sistemas estáveis em malha aberta, Nu = 1
é geralmente satisfatório. Rossiter (2003), por sua vez, afirma que Nu é geralmente menor ou
igual a 3. Devido a estes fatores, neste trabalho, por estar sendo avaliado controladores que
6
Para um significado mais preciso de “grande” sugere-se consultar (ROSSITER, 2003)
Rossiter (2003) apresenta um exemplo de sistema em que só é notada a influência de variações em δ na saída
(em malha fechada) quando δ sofre variações da ordem de 104 .
8
Rossiter (2003) faz uma analogia com jogadores de xadrez: Um jogador de xadrez experiente (modelo acurado) é capaz de prever várias jogadas a frente enquanto que um jogador iniciante (modelo não muito acurado) está
preocupado apenas com a sua próxima jogada.
7
CAPÍTULO 4. METODOLOGIA
79
empregam modelos internos com descrição menos acurada do sistema, não foram considerados
valores maiores que 5 para Nu .
4.5.4 Escolha de N2
Feita a escolha dos parâmetros N1 , Nu e δ, o parâmetro N2 foi variado de N2 = 5 até
30 (este último foi o valor em que não foram observadas alterações significativas nas respostas)
sendo avaliado o impacto da variação de N2 sobre os índices de desempenho descritos na seção
4.4.
4.6 Verificação de desempenho do controlador projetado
Escolhidos os parâmetros N1 , N2 , Nu e δ conforme descrito na seção 4.5, os controladores projetados foram avaliados pela sua capacidade de manutenção da glicemia em um
paciente diabético metabolicamente normalizado submetido a refeições com quantidades variadas de carboidratos (20 g − 120 g) e pela sua capacidade, medida pelo tempo de acomodação ta ,
de reestabelecer a normoglicemia em pacientes diabéticos não metabolicamente normalizados.
Capítulo 5
Análise dos resultados
Neste capítulo serão apresentados os resultados obtidos no desenvolvimento do projeto
do controlador preditivo para uma bomba de infusão de insulina. Inicialmente, será discutida
a influência da taxa de infusão intravenosa de insulina (rIV I ) na concentração basal de glicose
no sangue periférico venoso (Gbasal ). Em seguida, para efeito de comparação, serão apresentados os valores de máximos e mínimos da concentração de glicose no sangue periférico venoso
(Gmax e Gmin respectivamente), e o tempo para a concentração de glicose retornar à faixa de
2% da referência (ta ) observados em um paciente diabético metabolicamente normalizado, sem
bomba de infusão, após uma refeição com 50 g de carboidratos. Ainda, para efeito de comparação, será mostrada a influência, no diabético metabolicamente normalizado sem bomba de
infusão, de refeições com quantidades variadas de carboidrato (Qc ) nos valores de Gmax e ta
observados após a alimentação. Serão mostrados, também, os resultados obtidos para a determinação do modelo interno empregado explicitamente no algoritmo de controle e os resultados
para a sintonia do controlador. Por fim, será verificado o desempenho do controlador projetado na regulação da concentração sanguínea de glicose em duas situações: (1) na regulação da
glicemia em um paciente diabético metabolicamente normalizado submetido a refeições com
quantidades variadas de carboidratos; (2) no restabelecimento da normoglicemia em pacientes
diabéticos metabolicamente não-normalizados.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
81
5.1 Simulações dos modelos patológicos
No capítulo 4 foi visto que o estado inicial, tanto do modelo patológico normalizado
quanto de um modelo patológico não-normalizado, era univocamente determinado pela taxa de
infusão intravenosa de insulina, rIV I , em mU/min.
Neste trabalho, em todas as simulações realizadas, foi assumido que os modelos foram
inicializados com rIV I = 22,4 mU/min. No caso do modelo patológico normalizado esta
taxa rIV I está associada à concentração basal de glicose no sangue venoso da periferia (Gbasal )
de 75,0 mg/dl (ver, na figura 5.1, as concentrações Gbasal em função de rIV I ). No caso dos
modelos patológicos não-normalizados, a cada conjunto de parâmetros representativos de um
distúrbio metabólico esta taxa de infusão estava associada a uma concentração Gbasal diferente.
As figuras 5.2(a), 5.2(b) e 5.2(c) mostram, respectivamente, os valores de Gbasal , para rIV I =
22,4 mU/min, em função do parâmetro D do MPI GU (todos os outros parâmetros nominais),
G
do parâmetro E do MHGP
(todos os outros parâmetros nominais) e também do parâmetro FLIC
(todos os outros parâmetros nominais).
Concentração de glicose
no sangue venoso da periferia (mg/dl)
160
140
120
100
80
60
40
0
5
10
15
20
25
30
rIVI (mU/min)
Figura 5.1: Concentração basal de glicose no sangue venoso da periferia, Gbasal (mg/dl), em
função da taxa de infusão intravenosa de insulina, rIV I (mU/min), para o modelo patológico
normalizado.
Visando a comparação futura, é mostrada na figura 5.3(a) a concentração de glicose
no sangue periférico venoso de um paciente diabético tipo I metabolicamente normalizado ao
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
82
85
95
90
80
85
80
Gbasal (mg/dl)
Gbasal (mg/dl)
75
70
65
75
70
65
60
60
55
55
−9
−8
−7
−6
−5
−4
−3
50
0.5
−2
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
G
Parâmetro E do MHGP
I
Parâmetro D do MPGU
(a)
(b)
90
85
Gbasal (mg/dl)
80
75
70
65
60
0.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
FLIC
(c)
Figura 5.2: Concentração basal de glicose no sangue venoso da periferia, Gbasal , em função
dos parâmetros representativos de um distúrbio metabólico assumindo rIV I = 22,4 mU/min.
Enquanto um parâmetro foi variado, os outros foram mantidos em seus valores nominais.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
83
ingerir, no instante 50 min, uma refeição com 50 g de carboidratos. A taxa de absorção de
glicose no trato gastrintestinal para a refeição anterior, simulada com o modelo de Lehmann e
Deutsch (1992), é mostrada na figura 5.3(b).
140
350
130
300
250
rOGA (mg/min)
G (mg/dl)
120
110
100
200
150
90
100
80
50
70
0
100
200
300
400
500
600
Tempo (min)
(a)
700
0
0
100
200
300
400
500
600
700
Tempo (min)
(b)
Figura 5.3: Concentração de glicose no sangue venoso da periferia observada em um paciente
diabético normalizado sem bomba de infusão (modelo patológico normalizado inicializado com
rIV I = 22,4 mU/min) após uma refeição com 50 g de carboidrato no instante 50 min (taxa de
absorção de glicose no trato gastrintestinal obtida com o modelo de Lehmann e Deutsch (1992)).
Analisando a figura 5.3(a) observa-se, após a alimentação, que o tempo (ta ) decorrido para que a concentração volte à faixa de 2% em torno de Gbasal = 75,0 mg/dl é de
450 min. Ainda, a concentração máxima de glicose no sangue venoso da periferia (Gmax ) é
de 133,2 mg/dl enquanto que a concentração mínima (Gmin ) é de 75,0 mg/dl. A tabela 5.1
apresenta um resumo destes resultados.
Tabela 5.1: Concentrações mínima (Gmin ) e máxima (Gmax ) de glicose no sangue periférico
venoso e tempo de acomodação de 2% (ta ) observadas em paciente diabético tipo I metabolicamente normalizado (modelo patológico normalizado) após a ingestão de uma refeição com
50 g de carboidratos.
ta
Gmax
Gmin
75,0 mg/dl 133,2 mg/dl 450,0 min
Observe que, como no diabético tipo I não há liberação pancreática de insulina, o restabelecimento da normoglicemia é demorado e o indivíduo está sujeito a elevadas concentrações
sanguíneas de glicose. No caso ilustrado na figura 5.3, antes de ser restabelecida a glicemia,
muito provavelmente o paciente já terá tido outra refeição (ta = 450,0 min), sendo observados picos de concentração de glicose, no sangue venoso da periferia (G), ainda maiores que o
anterior. Por isso, é desejável restabelecer a normoglicemia tão rápido quanto possível.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
84
As figuras 5.4(a) e 5.4(b) mostram, respectivamente, o efeito de refeições com quantidades variadas de carboidratos (Qc ) em Gmax e ta observadas em paciente diabético metabolicamente normalizado. Observando estas figuras percebe-se, conforme esperado, que refeições
mais ricas em carboidrato estão associadas a concentrações mais elevadas de glicose no sangue
bem como é necessário mais tempo (ta ) para restabelecer a normoglicemia. Isso decorre da
ausência da secreção pancreática de insulina (agente hipoglicemiante) que atuaria no restabele-
170
700
160
650
150
600
140
550
ta (min)
Gmax (mg/dl)
cimento mais rápido da normoglicemia.
130
500
120
450
110
400
100
350
90
0
20
40
60
80
100
120
300
0
20
Qc (g)
(a)
40
60
80
100
120
Qc (g)
(b)
Figura 5.4: Influência da quantidade de carboidratos na alimentação (Qc ) em Gmax e em ta
para o modelo metabolicamente normalizado sem bomba de infusão.
5.2 Determinação do modelo interno
Procedendo conforme descrito no capítulo 4, foi calculada a diferença entre a resposta
ao degrau de cada um dos modelos dados na página 72, e a resposta ao degrau unitário do
modelo patológico normalizado (sem o valor em regime). Em seguida foi calculada a integral
do quadrado desta diferença entre o instante da aplicação do degrau e 600 min.
A figura 5.5(a) mostra a diferença (erro) entre as respostas ao degrau unitário do modelo 1, modelo de primeira ordem com atraso do Sorensen (1985) (ver equação (4.8)), e o
modelo patológico normalizado (sem valor de regime); bem como o valor da diferença entre
o modelo 2, aproximação de Padè de primeira ordem para o atraso (ver equação (4.9)), e o
modelo patológico normalizado. Nas figuras 5.5(b), 5.5(c) e 5.5(d) são mostradas as mesmas
comparações considerando-se os modelos 2, 3 (ver equação (4.10)), 4 (ver equação (4.11)) e 5
(ver equação (4.12)) respectivamente.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
85
0.3
0.3
Atraso
Padè de 2a ordem
0.25
0.2
0.2
0.15
0.15
Erro (mg/dl)
Erro (mg/dl)
Atraso
Padè de 1a ordem
0.25
0.1
0.05
0.1
0.05
0
0
−0.05
−0.05
−0.1
−0.1
−0.15
−0.15
0
100
200
300
400
500
600
0
100
200
300
Tempo (min)
Tempo (min)
(a)
(b)
0.3
400
Atraso
Padè de 4a ordem
0.25
0.2
0.2
0.15
0.15
Erro (mg/dl)
Erro (mg/dl)
600
0.3
Atraso
Padè de 3a ordem
0.25
0.1
0.05
0.1
0.05
0
0
−0.05
−0.05
−0.1
−0.1
−0.15
500
0
100
200
300
400
500
600
−0.15
0
100
200
300
Tempo (min)
Tempo (min)
(c)
(d)
400
500
600
Figura 5.5: Comparação entre as respostas ao degrau unitário dos modelos lineares com a resposta ao degrau unitário do modelo patológico normalizado sem o valor de regime, inicializado
com rIV I = 22,4 mU/min. Nestas figuras, Erro (mg/dl) é a diferença entre a saída do modelo
aproximado e a saída do modelo patológico normalizado submetidos a uma excitação degrau
unitário no instante 50 min.
Analisando os resultados mostrados na figura 5.5 foi escolhido, conforme discutido
anteriormente, o modelo 3, ou seja, o modelo com aproximação de Padè de 2a ordem para o
atraso
G(s) =
−3
(90s + 1)(50s2 + 10s + 1)
(5.1)
por sua resposta ao degrau unitário ser mais próxima (no sentido da integral definida anteriormente) da resposta ao degrau unitário do modelo patológico normalizado (sem valor em
regime).
O modelo da equação (5.1) foi, então, discretizado, com um tempo de amostragem
T = 5 min, assumindo-se um segurador de ordem zero na sua entrada. O modelo discretizado
obtido foi:
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
G(z) =
−0,0106z −1 − 0,0323z −2 − 0,0062z −3
1,0000 − 2,0105z −1 + 1,3749z −2 − 0,3480z −3
86
(5.2)
que pode ser reescrito como:
A(z −1 ) y(k) = B(z −1 ) u(k − 1)
(5.3)
A(z −1 ) = 1,0000 − 2,0105z −1 + 1,3749z −1 − 0,3480z −3
(5.4)
B(z −1 ) = −0,0106 − 0,0323z −1 − 0,0062z −2
(5.5)
y(k) = G(k) − 75,0
(5.6)
u(k) = uinfundida (k) − 22,4
(5.7)
onde
Observe que y(k) é o desvio da concentração de glicose no sangue periférico venoso
(G) em relação ao seu valor em regime (75,0 mg/dl), e u(k) é o desvio da taxa de infusão
intravenosa de insulina (uinfundida ) em relação ao valor basal da taxa de infusão (22,4 mU/min).
5.3 Sintonia do controlador
Em todas as simulações realizadas para a sintonia do controlador foi admitida uma
alimentação com 50 g de glicose no instante 50 min e o controlador atuando na regulação da
glicemia em um paciente diabético metabolicamente normalizado (modelo patológico normalizado).
A sintonia do controlador consistiu na escolha dos parâmetros N1 , N2 , Nu e δ, conforme descrito no capítulo 4, de forma a ter-se um compromisso entre os seguintes requisitos,
observados após uma refeição com 50 g de carboidrados:
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
87
• Maximizar a concentração mínima de glicose no sangue periférico venoso (Gmin );
• Minimizar a concentração máxima de glicose no sangue periférico venoso (Gmax );
• Minimizar a quantidade infundida de insulina (Qu );
• Minimizar o tempo de acomodação de 2% (ta );
• Reduzir as oscilações na concentração de glicose no sangue periférico venoso;
Os parâmetros N1 e δ foram considerados fixos:
• N1 = 1
• δ=0
conforme discutido no capítulo 4.
Inicialmente escolheu-se Nu = 1 e variou-se o parâmetro N2 . Foi observado que para
valores pequenos de N2 a concentração de glicose (G) apresentava algumas oscilações indesejáveis (ver, na figura 5.6 para N2 = 5, as oscilações entre o instante 250 min e 350 min). À
medida em que N2 foi aumentado observou-se uma resposta mais lenta do sistema e uma redução do comportamento oscilatório. Observe, nas figuras 5.8(e) e 5.8(f), os respectivos valores
máximos do sinal de controle (umax ) e da variação do sinal de controle (4umax ) em função de
N2 , quando Nu = 1. À medida que N2 aumenta, tanto umax quanto 4umax diminuem.
Foi observado ainda (ver figura 5.8) que, com o aumento de N2 a concentração mínima
Gmin diminuía (o que é indesejável); a concentração máxima Gmax aumentava (o que é indesejável); a quantidade de insulina Qu diminuía (o que é desejável); o tempo de acomodação ta
aumentava (o que é indesejável); a resposta apresentava um comportamento menos oscilatório
(o que é desejável).
Ainda, em toda as simulações as restrições no sinal de controle e na variação do sinal
de controle não estavam ativas. Assim, a função quadprog encontrou as mesmas soluções que
seriam encontradas se tivesse sido implementado a solução sem restrições (ver equação (3.54)
na página 64). Como Nu = 1 e N2 foi tomado sempre maior que 2 a matriz GT G é sempre
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
88
80
N2=5
N2=10
N =15
2
N =20
79
2
78
G (mg/dl)
77
76
75
74
73
72
71
70
0
100
200
300
400
500
600
Tempo (min)
Figura 5.6: Concentração de glicose no sangue periférico venoso (G) em função de N2 com
Nu = 1 após uma refeição com 50 g de carboidratos no instante 50 mim.
inversível (ver item 4.5.2 na página 76) o que garante a existência da solução para o caso sem
restrições.
Do exposto acima, e dos requisitos de projeto, foi escolhido, para o caso de Nu = 1,
N2 = 15. Outros valores para N2 poderiam, naturalmente, ter sido tomados uma vez que não foi
estabelecido, precisamente, o compromisso entre os requisitos de projetos (em especial sobre a
quantificação do comportamento oscilatório).
A seguir, foi considerado Nu = 2 e repetido o procedimento anterior (quando Nu = 1)
60
4
N2=5
N2=20
2
∆u (mU/min por T)
50
u (mU/min)
N =5
2
N2=20
3
55
45
40
35
1
0
−1
−2
30
−3
25
20
−4
0
100
200
300
Tempo (min)
(a) u
400
500
600
−5
0
100
200
300
400
500
600
Tempo (min)
(b) 4u
Figura 5.7: Controle (u) e variação do sinal de controle (4u) quando Nu = 1 e N2 = 5 ou
N2 = 20. Observe que o aumento de N2 diminui a variação do sinal de controle.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
89
para verificar a influência de variações em N2 nos índices de desempenho: Gmin , Gmax , Qu , ta
e a presença de oscilações na resposta (pela análise da resposta no tempo).
No caso em que Nu = 2 foi observado que, para qualquer valor de N2 > 2, o sistema
não saiu do limite de 2% do valor em torno do valor de referência (75 mg/dl), ou seja, a concentração de glicose no sangue periférico venoso permaneceu entre 73,5 mg/dl e 76,5 mg/dl
(ver, na figura 5.9, G em função do tempo nos casos em que N2 = 5 e N2 = 20, com Nu = 2).
Analogamente aos casos em que Nu = 1, um aumento em N2 fez com que Gmin diminuísse (ver figura 5.11(a)) e Gmax aumentasse (ver figura 5.11(b)). Ainda, para os diversos
valores de N2 testados, a quantidade de insulina (acima da basal) infundida não variou significativamente, ficando em torno de Qu = 4,7 mU/min (±0,006). A taxa máxima de infusão
também não variou significativamente ficando em torno de umax = 56,3 mU/min (± 0,003).
Com respeito ao módulo da variação na taxa de infusão de insulina, observou-se que um aumento em N2 fez com que esta variação diminuísse, como anteriormente, o que refletia em uma
resposta mais lenta do sistema. Neste caso, entretanto, não foi notado, para variações de N2
acima de 20, alterações significativas na resposta (veja a concentração de glicose no sangue
periférico venoso, mostrada na figura 5.9 para N2 = 5 e N2 = 20, quando Nu = 2).
Os resultados discutidos acima pareciam sugerir que um controlador sintonizado com
Nu = 2 e qualquer N2 ≥ 2 apresentava desempenho melhor em relação aos controladores
em que Nu = 1. Entretanto, ao analisar a resposta temporal (ver figura 5.9), percebeu-se que,
nos casos em que Nu = 2, o sistema apresentava um comportamento oscilatório para todos os
valores de N2 estudados (para N2 > 20 a resposta não diferiu significativamente em relação
à mostrada na figura 5.9 para N2 = 20). Devido às oscilações na resposta serem altamente
indesejáveis, segundo Sorensen (1985), não foram considerados controladores com Nu = 2.
Os casos em que Nu = 3 e Nu = 4 (bem como valores maiores de Nu ) apresentaram,
assim como nos casos em que Nu = 2, respostas oscilatórias para todos os valores de N2
estudados (N2 > 3 e N2 > 4 respectivamente para Nu = 3 e Nu = 4). Analogamente ao
caso em que Nu = 2, um aumento em N2 para N2 > 20 não alterou significativamente as
concentrações de glicose G observadas. As figuras 5.12(a) e 5.12(b) mostram, respectivamente,
as respostas para Nu = 3 e Nu = 4 quando N2 = 20 (valores de N2 maiores que 20 não
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
90
implicaram em diferenças significativas nas concentrações mostradas na figura 5.12.)
Novamente, devido às oscilações indesejáveis, os casos em que Nu = 3 e Nu = 4
(bem como Nu > 4), não foram considerados.
Uma possível explicação para os comportamentos oscilatórios observados nos casos
em Nu ≥ 2 pode ser dada a seguir. Considere, por exemplo, Nu = 2. No instante k o algoritmo de controle calcula, com base no vetor de predições Y(k), 4u(k) e 4u(k + 1) usando
apenas 4u(k) no cálculo do sinal de controle a ser aplicado no instante atual k. O fato de
ser calculado duas variações (futuras) no sinal de controle em cada instante de amostragem dá
maior flexibilidade ao algoritmo. Isto porque o desvio entre a concentração de glicose medida,
no instante atual, e a concentração de referência é vista, pelo algoritmo de controle, como podendo ser compensada pelos dois sinais de controle futuros calculados. Caso as predições Y(k)
não sejam suficientemente acuradas, o 4u(k + 1) calculado no instante k poderá diferir significativamente em relação ao 4u(k + 1) calculado no instante k + 1 (no instante k + 1 são
calculados 4u(k + 1) e 4u(k + 2), sendo o primeiro empregado no cálculo do sinal de controle
efetivamente aplicado à planta). Dessa forma a “compensação calculada” pelo algoritmo de
controle no instante anterior pode não ser, de fato, satisfatória, sendo necessária uma correção,
em relação à compensação anterior, que poderá originar algumas oscilações.
No caso em que Nu = 1, por sua vez, em cada instante de amostragem é calculado
apenas o “melhor” sinal de controle para aquele instante. Isso parece ser de fato interessante
quando não se espera uma boa acurária das predições realizadas utilizando o modelo interno
(caso deste trabalho).
Segundo Clarke (1996), de fato, na prática duas escolhas são feitas para os parâmetros
N1 , N2 , Nu e δ na estratégia GPC. O primeiro é o mean-level control com N1 = d, N2 suficientemente grande, geralmente em torno de 10, Nu = 1 e δ = 0. O outro é baseado no controlador
dead-beat onde a idéia é alcançar a referência tão rápido quanto possível de forma que o erro
e todas as suas derivadas tornam-se zero simultaneamente. O controlador dead-beat pode ser
sintonizado a partir das seguintes escolhas para os horizontes:
N1 = n, N2 ≥ 2n − 1, Nu = n e δ = 0
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
91
onde n é a maior potência de z −1 em sua forma integral (ARIX) (CLARKE, 1996).
O controlador com os parâmetros
• N1 = 1
• N2 = 15
• Nu = 1
• δ=0
foi o que apresentou, neste trabalho, o melhor desempenho, segundo os índices estabelecidos na
seção 4.4, se enquadra, portanto, na primeira das escolhas principais acima, ou seja, mean-level
control (CLARKE, 1996).
5.4 Verificação de desempenho do controlador escolhido
Feita a sintonia do controlador, o seu desempenho na regulação da concentração sanguínea de glicose foi avaliado, conforme discutido anteriormente, em duas situações: (1) em
um paciente diabético metabolicamente normalizado submetido a refeições com quantidades
variadas de carboidratos; (2) no restabelecimento da normoglicemia em pacientes diabéticos
metabolicamente não-normalizados.
Antes, porém, de verificar o desempenho nas situações anteriores, será discutido o
desempenho do controlador, com N1 = 1, N2 = 15, Nu = 1 e δ = 0, na regulação da concentração sanguínea de glicose em um paciente diabético metabolicamente normalizado ingerindo
uma refeição com 50 g de carboidratos (mesmas condições na sintonia do controlador).
Os índices de desempenho observados quando o controlador estava atuando na regulação da glicemia em um paciente diabético metabolicamente normalizado, após uma refeição
com 50 g de carboidratos, são resumidos na tabela 5.2. Note a redução significativa, em relação
aos valores observados em um paciente diabético sem controlador (ver tabela 5.1), na concentração máxima de glicose no sangue periférico venoso e no tempo de acomodação de 2% na
regulação da glicemia após a refeição anterior para o diabético utilizando o controlador. A figura 5.15 compara as concentrações de glicose no sangue periférico venoso em um paciente
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
92
diabético metabolicamente normalizado com controlador e sem controlador após uma refeição
com 50 g de carboidratos no instante 50 min.
As figuras 5.13, 5.14(a) e 5.14(b) mostram, respectivamente, a concentração de glicose
no sangue periférico venoso, taxa de infusão de insulina e variação na taxa de infusão de insulina
após o paciente diabético tipo I metabolicamente normalizado ter ingerido uma refeição com
50 g de carboidratos no instante 50 min.
Tabela 5.2: Valores dos índices de desempenho alcançados pelo controlador escolhido atuando
em paciente diabético metabolicamente normalizado após uma refeição com 50 g de carboidratos.
Qu
ta
Gmax
Gmin
70,9 mg/dl 78,9 mg/dl 248,1 min 4,7 U
Para a verificação do desempenho do controlador projetado quando atuando em um
paciente diabético metabolicamente normalizado, submetido a refeições com quantidades variadas de carboidratos, considere os resultados mostrados nas figuras 5.16(a), 5.16(b) e 5.16(c).
Estas figuras mostram, respectivamente, a concentração mínima de glicose, tempo de acomodação de 2%, e quantidade de insulina infundida (acima do basal) em função da quantidade de
carboidratos na refeição. Observe, na figura 5.16(b), que um aumento na quantidade de carboidratos na refeição aumenta de forma aproximadamente linear o tempo de acomodação de
2% (ver, na figura 5.4(b), os tempos ta em função de Qc , observados em um paciente diabético metabolicamente normalizado sem controlador). Na figura 5.16(c) deve ser observado que,
assim como ta , a quantidade de insulina infundida Qu aumenta quase que linearmente com a
quantidade de carboidratos na refeição Qc . Com relação à concentração máxima de glicose no
sangue periférico venoso em função da quantidade de carboidratos na refeição não foram verificadas, no caso do paciente diabético com controlador, alterações significativas em Gmax (Gmax
se manteve constante em 78,9 mg/dl). No caso de um paciente diabético sem controle, um
aumento na quantidade de carboidratos na refeição aumenta a concentração de glicose máxima
no sangue periférico venoso (ver figura 5.4(a)).
Para entender o motivo pelo qual, no caso do paciente diabético com controlador, a
concentração máxima de glicose no sangue periférico venoso não sofre alterações significativas,
considere as figuras 5.17(a) e 5.17(b). Nestas figuras mostra-se, respectivamente, as concentra-
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
93
ções de glicose e a taxa de absorção de glicose no trato gastrintestinal após uma refeição com
Qc = 50 g e Qc = 100 g (simulada com o modelo de Lehmann e Deutsch (1992)). Observe,
na figura 5.17(b), que as taxas de absorção de glicose são as mesmas até o instante em que a
concentração G atinge o pico. Desta forma, as concentrações sanguíneas de glicose observadas,
após refeições com quantidades variadas de carboidratos, são as mesmas até ser atingido, e um
pouco após ter sido atingido, o pico na concentração sanguínea de glicose.
Com relação à verificação do desempenho do controlador ao restabelecer a normoglicemia em pacientes diabéticos metabolicamente não normalizados considere, finalmente, as
figuras 5.18(a), 5.18(b) e 5.18(c). Estas figuras mostram os tempos para se restabelecer a normoglicemia (concentração voltar à faixa de 2% em torno da concentração de referência) ao se
considerar um distúrbio metabólico representado por uma variação, em relação ao valor noG
minal, no valor dos parâmetros D do MPI GU , E do MHGP
e FLIC respectivamente. Nestas
figuras foi considerado apenas um distúrbio metabólico por vez, ou seja, quando o parâmeG
tro D do MPI GU foi variado os parâmetros E do MHGP
e FLIC foram considerados iguais aos
seus valores nominais. Observe que, para os distúrbios metabólicos considerados (bastante
abrangentes, segundo Parker et al. (2001, 2000)), o controlador consegue restabelecer a normoglicemia em, no máximo, 110 min. Ainda, quando o paciente diabético estava inicialmente em
estado hipoglicêmico não foram observados concentrações de glicemia menores que a inicial
no restabelecimento da glicemia (gráficos não mostrados).
5.5 Comparação com resultados da literatura
Parker et al. (1999) apresentou controladores preditivos para regulação da glicemia em
paciente diabéticos baseado nas estratégias DMC (CUTLER; RAMAKER, 1980, 1979), MPCSE
(RICKER, 1990) e NQDMCSE (GATTU; ZAFIRIOU, 1992). Além dos controladores preditivos,
foi apresentado, para efeito de comparação, uma versão discretizada (tempo de amostragem
5 min) do controlador, baseado na técnica IMC (GARCIA; MORARI, 1982) apresentado em
Sorensen (1985). A tabela 5.3 mostra as concentrações mínimas de glicose em relação à concentração de referência (undershoot) após uma refeição com 50 g de carboidratos, bem como o
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
94
tempo de acomodação de 2% após às refeições.
Tabela 5.3: Comparação com outros controladores apresentados na literatura. O controlador
GPC acima é o controlador com parâmetros N1 = 1, N2 = 15, Nu = 1 e δ = 0 avaliado neste
trabalho e os outros controladores foram apresentados em (PARKER et al., 1999).
Controlador
GPC
NLQDMCSE
MPCSE
DMC
IMC
Undershoot (mg/dl)
4,1
3,6
4,4
9,7
8,7
ta (min)
248,1
216,0
204,0
343,0
376,0
Observe, na tabela 5.3, que o controlador GPC projetado neste trabalho apresentou um
desempenho superior aos controladores DMC e IMC apresentados em (PARKER et al., 1999) e
um desempenho comparável aos dos controladores NLQDMCSE e MPCSE, também apresentados em (PARKER et al., 1999).
Por terem sido empregados modelos internos mais acurados, em relação ao empregado neste trabalho, nos algoritmos de controle preditivos elaborados por Parker et al. (1999)
esperava-se, a priori, um desempenho melhor destes controladores. Uma possibilidade para os
resultados de Parker et al. (1999) não terem sido melhores que os apresentados neste trabalho,
apesar do modelo interno empregado aqui ser bem mais simples que os empregados no primeiro,
é a de ter havido algum problema na sintonia dos controladores de (PARKER et al., 1999). Em
ambos os trabalhos, a dinâmica do sistema endócrino-metabólico, em pacientes diabéticos, foi
simulada pelo modelo patológico normalizado de Sorensen (1985). Foram consideradas as
mesmas variáveis de saída e manipulada além de ter sido empregado o mesmo modelo, o de
Lehmann e Deutsch (1992), para a taxa de absorção de glicose no trato gastrintestinal.
Parker et al. (1999) não avaliou o desempenho dos seus controladores na regulação da
glicemia em um paciente diabético metabolicamente normalizado submetido a refeições com
quantidades variadas de carboidratos, nem no restabelecimento da normoglicemia em pacientes
diabéticos metabolicamente normalizados.
Em Parker et al. (2001, 2000), de onde foram obtidos os parâmetros representativos
de distúrbios metabólicos empregados neste trabalho, não foram considerados os controladores atuando no restabelecimento da normoglicemia mas sim, na regulação da glicemia após
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
95
uma refeição nos instantes após restabelecida a normoglicemia. Um dos trabalhos futuros será
verificar o desempenho do controlador apresentado neste trabalho nesta situação.
Ainda, em Parker et al. (2001, 2000), não foi verificado o desempenho dos controladores apresentados nas situações em que os pacientes estavam submetidos a refeições com
quantidades variadas de carboidratos (mas apenas 50 g).
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
96
80
73
79.5
72.5
Gmax (mg/dl)
Gmin (mg/dl)
79
72
71.5
78.5
78
71
77.5
70.5
5
10
15
20
25
77
30
5
10
15
20
25
30
N2
N2
(a) Gmin em função de N2
(b) Gmax em função de N2
300
4.72
290
4.71
280
4.7
270
4.69
ta (min)
4.67
250
240
4.66
230
4.65
220
4.64
4.63
210
5
10
15
20
25
200
30
5
10
15
(c) Qu em função de N2
4.8
|∆u| (mU/min por T)
56
(mU/min)
30
5
56.2
max
25
(d) ta em função de N2
56.4
55.8
55.6
55.4
4.6
4.4
4.2
4
3.8
55.2
55
20
N2
N2
u
Qu (U)
260
4.68
3.6
5
10
15
20
25
N2
(e) umax em função de N2
30
5
10
15
20
25
30
N2
(f) |4u|max em função de N2
Figura 5.8: Verificação do desempenho em função do N2 para Nu = 1.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
97
76.5
N2=5
N2=20
76
G (mg/dl)
75.5
75
74.5
74
73.5
0
100
200
300
400
500
600
Tempo (min)
Figura 5.9: Concentração de glicose no sangue periférico venoso (G) em função de N2 com
Nu = 2 após uma refeição com 50 g de carboidratos no instante 50 mim.
60
5
4
55
3
∆u (mU/min por T)
u (mU/min)
50
45
40
35
2
1
0
−1
−2
30
−3
25
−4
20
0
100
200
300
Tempo (min)
(a) u
400
500
600
−5
0
100
200
300
400
500
600
Tempo (min)
(b) 4u
Figura 5.10: Controle (u) e variação do sinal de controle (4u) quando Nu = 2 e N2 = 20.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
98
74.4
76.2
74.3
76.1
74.2
Gmax (mg/dl)
Gmin (mg/dl)
76
74.1
74
73.9
75.9
75.8
73.8
75.7
73.7
73.6
5
10
15
20
25
75.6
30
5
10
15
20
25
30
N2
N2
(a) Gmin em função de N2
(b) Gmax em função de N2
5.9
5.8
|∆u| (mU/min por T)
5.7
5.6
5.5
5.4
5.3
5.2
5.1
5
4.9
5
10
15
20
25
30
N2
(c) |4u|max em função de N2
Figura 5.11: Verificação do desempenho em função do N2 para Nu = 2.
75.8
75.4
75.3
75.6
75.2
75.4
75.1
G (mg/dl)
G (mg/dl)
75.2
75
74.8
75
74.9
74.8
74.7
74.6
74.6
74.4
74.2
74.5
0
100
200
300
400
500
600
74.4
0
100
200
300
Tempo (min)
Tempo (min)
(a) Nu = 3
(b) Nu = 4
400
500
600
Figura 5.12: Concentração de glicose no sangue periférico venoso após uma refeição com 50 g
de carboidratos no instante 50 min e controlador com N2 = 20 e Nu = 3 ou Nu = 4 atuando.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
99
79
78
77
G (mg/dl)
76
75
74
73
72
71
70
0
50
100
150
200
250
300
350
400
450
500
Tempo (min)
Figura 5.13: Concentração de glicose no sangue periférico venoso observada em um paciente
diabético metabolicamente normalizado com infusão rIV I determinada pelo controlador com
os parâmetros N1 = 1, N2 = 15, Nu = 1 e δ = 0. O paciente foi submetido a uma refeição
com 50 g de carboidratos no instante 50 min.
4
55
3
50
2
∆u (mU/min por T)
u (mU/min)
60
45
40
35
1
0
−1
−2
30
−3
25
20
−4
0
50
100
150
200
250
300
Tempo (min)
350
400
450
500
−5
0
50
100
150
200
250
300
350
400
450
500
Tempo (min)
Figura 5.14: Taxa de infusão (u) e variação da taxa de infusão (4u) calculadas pelo controlador
escolhido (parâmetros N1 = 1, N2 = 15, Nu = 1 e δ = 0).
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
100
140
Diabético com controlador
Diabético sem controlador
130
G (mg/dl)
120
110
100
90
80
70
0
50
100
150
200
250
300
350
400
450
500
Tempo (min)
Figura 5.15: Comparação da concentração de glicose observada em um paciente diabético
metabolicamente normalizado com e sem controlador (parâmetros N1 = 1, N2 = 15, Nu = 1 e
δ = 0)
500
73
450
72.5
400
350
ta (min)
Gmin (mg/dl)
72
71.5
300
250
71
200
70.5
150
70
0
20
40
60
80
100
100
120
0
20
40
60
80
100
120
Qc
Qc (g)
(a) Gmin em função de Qc g
(b) ta em função de Qc g
12
10
Qu (U)
8
6
4
2
0
0
20
40
60
80
100
120
Qc (g)
(c) Qu em função de Qc g
Figura 5.16: Impacto da variação de Qc (entre 15 g e 120 g) nos índices de desempenho
observados em um paciente diabético metabolicamente normalizado com controlador.
CAPÍTULO 5. ANÁLISE DOS RESULTADOS
101
79
400
Q =50g
c
Q =100g
Qc=50g
Qc=100g
c
78
350
77
300
rOGA (mg/min)
G (mg/dl)
76
75
74
73
200
150
100
72
50
71
70
250
0
50
100
150
200
250
300
350
400
450
0
500
0
50
100
150
Tempo (min)
200
250
300
350
400
450
500
Tempo (min)
Figura 5.17: Concentração de glicose no sangue periférico venoso observada em um paciente
diabético metabolicamente nomalizado submetido à refeições com Qc = 50 g e Qc = 100 g.
110
110
100
100
90
90
80
70
ta (min)
ta (min)
80
70
60
60
50
50
40
40
30
30
20
−9
20
−8
−7
−6
−5
−4
−3
10
0.5
−2
0.6
0.7
Parametro D do M IPGU
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
Parametro E do M G
HGP
(a)
(b)
90
80
ta (min)
70
60
50
40
30
20
0.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
FLIC
(c)
Figura 5.18: Tempo para o controlador reestabelecer a normogligemia (ta ) em pacientes metabolicamente não-normalizados. Apenas um parâmetro representativo de um distúrbio metabólico foi avaliado por vez.
Capítulo 6
Comentários finais
Neste capítulo serão apresentadas as conclusões deste trabalho e algumas sugestões
para trabalhos futuros.
6.1 Conclusões
O presente trabalho visa a investigar o desempenho de controladores preditivos aplicados à regulação da glicemia em pacientes diabéticos tipo I, metabolicamente normalizados e
não-normalizados, mediante o emprego de bombas de infusão de insulina.
O controlador projetado teve o seu desempenho avaliado, quando considerado um paciente diabético metabolicamente normalizado, pelos valores máximo e mínimo da concentração
de glicose no sangue periférico venoso e pelo tempo para a glicemia retornar à faixa de 2% em
torno da concentração de referência, após uma refeição contendo quantidades variadas de carboidratos (de 15 g a 120 g). No caso de um paciente diabético metabolicamente normalizado, o
controlador foi avaliado pelo tempo decorrido para levar a concentração de glicose para a faixa
de 2% em torno da concentração de referência.
Ainda, o controlador preditivo, baseado na técnica GPC, proposto neste trabalho, empregou um modelo não-acurado do sistema a ser controlado. Mesmo assim, foi obtido um
controlador com desempenho comparável aos apresentados na literatura e que empregavam um
modelo mais acurado do sistema a ser controlado.
O bom desempenho do controlador projetado neste trabalho, mesmo empregando um
CAPÍTULO 6. COMENTÁRIOS FINAIS
103
modelo pobre da dinâmica do sistema a ser controlado foi atribuído ao fato do tempo de amostragem (T = 5 min) ser bem inferior ao tempo de acomodação do sistema (ta = 360 min).
Dessa forma o controlador preditivo compensava de forma satisfatória a incerteza no modelamento.
Comparando-se os resultados obtidos neste trabalho com os que já estão disponíveis na
literatura constatou-se que o controlador projetado aqui apresentou um desempenho comparável
aos já existentes sendo, entretanto, mais simples de ser projetado e menos custoso computacionalmente.
6.2 Sugestões para trabalhos futuros
Dentre as sugestões para trabalhos futuros destacam-se:
• Verificação do desempenho do controlador proposto no caso de um paciente metabolicamente não-normalizado submetido, após ter sido restabelecida a normoglicemia, a
refeições com quantidades variadas de carboidratos;
• Investigação do desempenho de controladores GPC projetados sem considerar, separadamente, as etapas de identificação do modelo interno e sintonia do controlador, como em
Shook et al. (1992)1 . Acredita-se que um modelo interno mais acurado poderá melhorar
o desempenho do controlador;
• Investigação da degradação do desempenho do controlador devido às imperfeições nos
sensores tais como atraso, ruído, resolução, entre outras;
• Consideração da infusão tanto de insulina quanto de soluções glicosadas para o restabelecimento da glicemia, o que poderia proporcionar desempenhos melhores.
1
Além de outros trabalhos que abordam a identificação de modelos para serem empregados em controladores
preditivos como (ROSSITER; KOUVARITAKIS, 2001; SCHÖN, 2001)
Apêndice A
Equações e Parâmetros do Modelo do
Sorensen
Neste apêndice são apresentadados todos os parâmetros e equações do modelo de Sorensen (1985) empregados neste trabalho.
A.1 Equações do balanço de massa do submodelo da glicose
No modelo do Sorensen (1985), G é a concentração de glicose na água do sangue. A
concentração de glicose no sangue, assumindo hematócrito de 0,40, é dada, aproximadamente,
por 0,84G e a concentração de glicose no plasma é dada, aproximadamente, por 0,925G (SORENSEN, 1985).
VBI
QG
dGBV
(GBV − GBI )
= GB (GH − GBV ) − G
dt
VBV TB
VBV
(A.1)
rBGU
1
dGBI
(GBV − GBI ) −
=
VBI
TB
dt
(A.2)
rRBCU
QG
QG
QG
QG
QG
dGH
H
P
K
L
+ GIN
G −
G
−
G
+
G
+
G
+
= B
P
V
K
L
BV
G H
G
G
G
G
dt
VHG
VH
VH
VH
VH
VH
(A.3)
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
105
rKGE
QG
dGK
(GH − GK ) −
= K
G
dt
VKG
VK
(A.4)
rHGU
rHGP
QG
QG
QG
dGL
L
G
−
G +
G
−
G
+
= A
G
G L
G G
G H
dt
VLG
VL
VL
VL
VL
(A.5)
VG
QG
dGP V
= GP (GH − GP V ) − GP I G (GP V − GP I )
dt
VP V TP
VP V
(A.6)
rP GU
1
dGP I
= G (GP V − GP I ) − G
dt
VP I
TP
(A.7)
rGGU
QG
dGG
(GH − GG ) − G + GGO
= G
G
dt
VG
VG
(A.8)
A.2 Taxas metabólicas do submodelo da glicose
A.2.1 Taxa de consumo de glicose no cérebro:
rBGU = 70,0 mg/min
(A.9)
A.2.2 Taxa de consumo de glicose pelas células vermelhas:
rRBCU = 10,0 mg/min
(A.10)
A.2.3 Taxa de utilização de glicose no intestino:
rGGU = 20,0 mg/min
(A.11)
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
106
A.2.4 Taxa de produção hepática de glicose:
I
Γ
G
B
rHGP = MHGP
MHGP
MHGP
rHGP
(A.12)
Taxa basal de produção hepática de glicose:
B
rHGP
= 155,0 mg/min
(A.13)
Efeito da insulina na produção hepática de glicose
I∞
MHGP
(ILN ) = 1,21 − 1,14 tanh [1,66(ILN − 0,89)]
(A.14)
I
1
dMHGP
I∞
I
(ILN ) − MHGP
]
= [MHGP
τ1
dt
(A.15)
Efeito do Glucagon na produção hepática de glicose
Γo
MHGP
= 2,7 tanh (0,39ΓN )
(A.16)
1 M Γo − 1
df2
) − f2
= [( HGP
2
τΓ
dt
(A.17)
Γo
Γ
MHGP
= MHGP
− f2
(A.18)
Efeito da glicose na produção hepática de glicose
G
= 1,42 − 1,41 tanh [0,620(GN
MHGP
L − 0,497)]
(A.19)
A.2.5 Taxa de consumo de glicose no fígado
B
G
I
rHGU
MHGU
rHGU = MHGU
(A.20)
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
107
Taxa basal do consumo de glicose no fígado:
B
rHGU
= 20,0 mg/min
(A.21)
Efeito da insulina na taxa de consumo de glicose no fígado
I∞
MHGU
= 2,0 tanh (0,55ILN )
(A.22)
I
1
dMHGU
I∞
I
− MHGU
)
= (MHGU
τ1
dt
(A.23)
Efeito da glicose na taxa de consumo de glicose no fígado
G
MHGU
= 5,66 + 5,66 tanh [2,44(GN
L − 1,48)]
(A.24)
A.2.6 Taxa de excreção de glicose pelos rins
rKGE
71,0 + 71,0 tanh [0,011(GK − 460)], se 0 ≤ GK < 460 mg/dl ;
=
−330 + 0,872GK ,
se GK ≥ 460 mg/dl.
(A.25)
A.2.7 Taxa de consumo de glicose na periferia
rP GU = MPI GU MPGGU rPBGU
(A.26)
Taxa basal de utilização de glicose na periferia
rPBGU = 35,0 mg/min
(A.27)
Efeito da insulina na taxa de utilização de glicose na periferia
MPI GU = 7,03 + 6,52 tanh [0,338(IPNI − 5,82)]
(A.28)
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
MPGGU = GN
PI
108
(A.29)
A.3 Equações do balanço de massa do submodelo da insulina
QI
dIBV
= IB (IH − IBV )
dt
VBV
(A.30)
QIH
QIP
QIK
QIL
QI
dIH
IH + P IIR
I
−
I
+
I
+
I
+
= BV
P
V
K
L
BV
dt
VHI
VHI
VHI
VHI
VHI
(A.31)
rKIC
QI
dIK
= KI (IH − IK ) −
dt
VKI
VK
(A.32)
rP IR rLIC
QI
QI
QI
dIL
= AI IH + GI IG − LI IL + I − I
dt
VL
VL
VL
VL
VL
(A.33)
VPII
QIP
dIP V
= I (IH − IP V ) − I I (IP V − IP I )
dt
V P V TP
VP V
(A.34)
rP IC
1
dIP I
= I (IP V − IP I ) − I
dt
VP I
TP
(A.35)
QI
dIG
= GI (IH − IG )
dt
VG
(A.36)
A.3.1 Taxa da degradação de insulina no fígado:
rLIC = FLIC (QIA IH + QIG IG + rP IR )
onde FLIC = 0,40.
(A.37)
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
109
A.3.2 Taxa de degradação da insulina nos rins:
rKIC = FKIC (QIK IH )
(A.38)
onde FKIC = 0,30
A.3.3 Taxa de degradação da insulina na periferia:
rP IC =
IP I
TI
P IC
)( Q1I ) − ( V PI )
( 1−F
FP IC
P
(A.39)
PI
onde FP IC = 0,15.
A.3.4 Taxa de liberação de insulina pelo pâncreas:
rP IR =
S(GH ) B
rP IR
S(GB
H)
(A.40)
A taxa basal de liberação de insulina pelo pâncreas (rPBIR ) depende do estado inicial
e é determinada na inicialização do modelo. A seguir o modelo da liberação pancréatica da
insulina usado no cálculo de rP IR
dP
= α(P∞ − P )
dt
(A.41)
dI
= β(X − I)
dt
(A.42)
dQ
= κ(Qo − Q) + γP − S
dt
(A.43)
X=
G3,27
H
3,27
132
+ 5,93G3,02
H
(A.44)
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
Y = X 1,11
(A.45)
P∞ = X 1,11
(A.46)
+
S = [M1 Y + M2 (X − I)0 ]Q
+
NOTAÇÃO: a0 =
110
(A.47)
0, a ≤ 0;
a, a > 0.
A.4 Equações do submodelo do glucagon:
1
dΓN
= Γ B (rP ΓR − rP ΓC )
V ·Γ
dt
(A.48)
rP ΓC = rM ΓC Γ
(A.49)
rP ΓR = MPI ΓR MPGΓR rPBΓR
(A.50)
Substituindo A.49 e A.50 em A.48 e observando que no estado basal a taxa de liberação
pancreática de glucagon é igual a taxa de degradação no plasma, ou seja,
rPBΓR = rPBΓC = rM ΓC ΓB
(A.51)
1
dΓN
= Γ (MPI ΓR · MPGΓR − ΓN )rM ΓC
V
dt
(A.52)
tem-se:
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
111
A.5 Taxas metabólicas no modelo do Glucagon:
A.5.1 Taxa de liberação de glucagon pelo pâncreas:
Efeito da glicose na taxa de liberação de glucagon
MPGΓR = 2,93 − 2,10 · tanh[4,18 · (GN
H − 0,61)]
(A.53)
Efeito da insulina na taxa de liberação de glucagon
N
MPI ΓR = 1,31 − 0,61 · tanh[1,06 · (IH
− 0,47)]
(A.54)
A.5.2 Taxa de degradação do glucagon no plasma:
rM ΓC = 910 ml/min
(A.55)
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
A.6 Parâmetros do modelo da glicose
QG
A
2,5 dl/min
QG
B
5,9 dl/min
QG
G
10,1 dl/min
QG
H
43,7 dl/min
QG
K
10,1 dl/min
QG
L
12,6 dl/min
QG
P
15,1 dl/min
VBI
4,5 dl
VP I
63,0 dl
VKG
6,6 dl
VGG
11,2 dl
VLG
25,1 dl
G
VBV
3,5 dl
VHG
13,8 dl
VPGV
10,4 dl
rRBCU
10,0 mg/min
rGGU
20,0 mg/min
rBGU
70,0 mg/min
B
rHGU
20,0 mg/min
B
rHGP
155,0 mg/min
rPBGU
35,0 mg/min
TB
2,1 min
TPG
5,0 min
τ1
25,0 min
τΓ
65,0 min
112
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
A.7 Parâmetros do modelo da insulina
QIA
0,18 l/min
QIB
0,45 l/min
QIG
0,72 l/min
QIH
3,12 l/min
QIK
0,72 l/min
QIL
0,9 l/min
QIP
1,05 l/min
VGI
0,945 l
VKI
0,505 l
VLI
1,14 l
VBI
0,265 l
VHI
0,985 l
VPIV
0,735 l
FKIC
0,30
FLIC
0,40
FP IC
0,15
TPI
20 min
A
0,048229 min−1
B
0,93141 min−1
XN
K
1,0
0,0079378 min−1
Q0
6,32 U
GΓ
0,57493 U/min
M1
0,007968
M2
0,106495
113
APÊNDICE A. EQUAÇÕES E PARÂMETROS DO MODELO DO SORENSEN
A.8 Parâmetros do modelo do glucagon
rP ΓC 0,910 l/min
VΓ
11,31 l
114
Apêndice B
Equações Diofantinas
B.1 Introdução
O termo equações diofantinas é uma homenagem prestada pelos matemáticos ao grego
Diofante por ter sido o primeiro a fazer um estudo sistemático, em seu tratado Aritmética1
escrito por volta de 250 d.C., da solução de equações com coeficientes e incógnitas inteiras
(HARDY; WRIGHT, 2000). Como exemplos de equações diofantinas nos inteiros temos as equações: 3x − 2y = 1, x3 + y 3 = z 3 e x3 − 117y 3 = 5 quando as soluções procuradas pertecem ao
conjunto dos números inteiros. Para maiores detalhes sobre equações diofantinas nos inteiros
consultar (LANDAU, 2002; HARDY; WRIGHT, 2000).
A terminologia equações diofantinas foi estendida para equações polinomiais, devido
ao fato que, sob o ponto de vista da álgebra abstrata os inteiros e polinômios são “entidades”
semelhantes (KUCERA, 1979). Para maiores detalhes sobre as relações algébricas entre inteiros
e polinômios consultar livros que tratem de álgebra, como por exemplo (HERSTEIN, 1999;
DOMINGUES; IEZZI, 1995). Para uma revisão sobre aplicações de equações diofantinas em
controle consultar (KUCERA, 1993).
Foi na margem de uma cópia do livro Aritmética de Diofante que, em 1637, Fermat enunciou que xn +y n = z n
não possue soluções inteiras para n > 2, conhecido como o útimo teorema de Fermat só provado por Andrew Wiles
em 1995 (SINGH, 1997)
1
APÊNDICE B. EQUAÇÕES DIOFANTINAS
116
B.2 Equações diofantinas polinomiais lineares: existência de
soluções
Definição B.1 (Equações diofantinas polinomiais lineares) As equações polinomiais do tipo
A(z −1 )E(z −1 ) + B(z −1 )F (z −1 ) = C(z −1 )
(B.1)
onde A(z −1 ), B(z −1 ) e C(z −1 ) são polinômios conhecidos em z −1 , são chamadas de equações
diofantinas polinomiais lineares nas incógnitas E(z −1 ) e F (z −1 ) (KUCERA, 1979).
Definição B.2 (Solução) Uma solução da equação diofantina polinomial linear (B.1) é o par de
polinômios E(z −1 ), F (z −1 ) em z −1 que satisfaz (B.1).
Notação B.1 O polinômio de maior grau que divide, simultaneamente, os polinômios não ambos nulos A(z −1 ) e B(z −1 ), será denotado por mdc (A(z −1 ), B(z −1 )).
Teorema B.1 (Existência de Solução) A equação diofantina (B.1), com A(z −1 ) e B(z −1 ) não
ambos nulos, admite solução se, e somente se, C(z −1 ) é divisível por mdc (A(z −1 ), B(z −1 )).
Ainda, dada uma solução E(z −1 ), F (z −1 ), todas as soluções são da forma
E(z −1 ) = E(z −1 ) + K(z −1 )
B(z −1 )
mdc (A(z −1 ),B(z −1 ))
F (z −1 ) = F (z −1 ) − K(z −1 )
A(z −1 )
mdc (A(z −1 ),B(z −1 ))
onde K(z −1 ) é um polinômio arbitrário em z −1 .
Prova: Ver (KUCERA, 1979). Para demonstração do teorema nos inteiros, cuja extensão para o
caso polinomial é imediata, consultar (LANDAU, 2002).
B.3 A equação: Ã(z −1)E(z −1) + z −j F (z −1) = 1
Neste trabalho em particular, tratar-se-á apenas de equações do tipo:
APÊNDICE B. EQUAÇÕES DIOFANTINAS
117
Ã(z −1 )E(z −1 ) + z −j F (z −1 ) = 1
(B.2)
Ã(z −1 ) = 1 + ã1 z −1 + . . . + ãna +1 z −(na +1)
(B.3)
onde
é um polinômio conhecido em z −1 .
Como mdc (Ã(z −1 ),z −j ) = 1, pois Ã(z −1 ) é mônico e, portanto não divisível por z −j ,
aplicando o teorema B.1 concluímos que a equação (B.2) admite infinitas soluções da forma:
E(z −1 ) = E(z −1 ) + K(z −1 )z −j ,
F (z −1 ) = F (z −1 ) − K(z −1 )A(z −1 )
(B.4)
com K(z −1 ) um polinômio arbitrário em z −1 .
Considere as soluções Ej (z −1 ), Fj (z −1 ) da equação (B.2), obtidas por uma escolha
conveniente do polinômio K(z) em (B.4), tais que deg (Ej ) = j − 1. Pelas equações (B.2) e
(B.3) conclui-se que, se deg (Ej ) = j − 1 então deg (Fj (z −1 )) = deg (Ã(z −1 )) − 1 = na .
Na seção B.3.1 será determinada a solução E1 (z), F1 (z −1 ):
E1 (z −1 ) = e1, 0
(B.5)
F1 (z −1 ) = f1, 0 + f1, 1 z −1 + . . . + f1, na z −na
(B.6)
e na seção B.3.2 será encontrada, de forma análoga ao apresentado em (CLARKE et al., 1987a),
uma relação recursiva que permite determinar a solução Ej+1 (z −1 ), Fj+1 (z −1 ):
Ej+1 (z −1 ) = ej+1, 0 + ej+1, 1 z −1 + . . . + ej+1, j−1 z −(j−1) + ej+1, j z −j
(B.7)
APÊNDICE B. EQUAÇÕES DIOFANTINAS
118
Fj+1 (z −1 ) = fj+1, 0 + fj+1, 1 z −1 + . . . + fj+1, na z −na .
(B.8)
a partir da solução Ej (z −1 ), Fj (z −1 ):
Ej (z −1 ) = ej, 0 + ej, 1 z −1 + . . . + ej, j−1 z −(j−1)
(B.9)
Fj (z −1 ) = fj, 0 + fj, 1 z −1 + . . . + fj, na z −na
(B.10)
B.3.1 Solução E1 (z −1 ), F1 (z −1 ) com deg(E1 (z −1 )) = 0
Para o caso em j = 1 tem-se que:
E1 (z −1 ) = e1, 0
(B.11)
F1 (z −1 ) = f1, 0 + f1, 1 z −1 + . . . + f1, na z −na
(B.12)
Substituido as equação (B.3), (B.11) e (B.12) na equação (B.2) obtém-se:
(1 + ã1 z −1 + . . . + ãna +1 z −(na +1) )e1, 0 + z −1 (f1, 0 + f1, 1 z −1 + . . . + f1, na z −na ) = 1 (B.13)
ou equivalentemente,
e1, 0 + (f1, 0 + ã2 e1, 0 )z −1 + . . . + (f1, na + ãna +1 e1, 0 )z −(na +1) = 1
(B.14)
Pela identidade polinomial:
e1, 0 = 1
(B.15)
f1, i = −ãi+1
i = 0, . . . ,na
APÊNDICE B. EQUAÇÕES DIOFANTINAS
119
Assim, as soluções E1 (z −1 ) e F1 (z −1 ) procuradas são:
E1 (z −1 ) = 1
(B.16)
F1 (z −1 ) = −ã1 − ã2 z −1 − . . . − ãna +1 z −na
(B.17)
B.3.2 Recursão das soluções Ej (z −1 ), Fj (z −1 ) com deg(Ej (z −1 )) = j − 1
Será mostrado agora, de forma análoga ao feito em (CLARKE et al., 1987a), que dada
uma solução Ej (z −1 ), Fj (z −1 ) de (B.2) com
Ej (z −1 ) = ej, 0 + ej, 1 z −1 + . . . + ej, j−1 z −(j−1)
(B.18)
Fj (z −1 ) = fj, 0 + fj, 1 z −1 + . . . + fj, na z −na
(B.19)
Calcula-se, recursivamente, a solução Ej+1 (z −1 ), Fj+1 (z −1 ):
Ej+1 (z −1 ) = ej+1, 0 + ej+1, 1 z −1 + . . . + ej+1, j−1 z −(j−1) + ej+1, j z −j
Fj+1 (z −1 ) = fj+1, 0 + fj+1, 1 z −1 + . . . + fj+1, na z −na
(B.20)
(B.21)
De fato, como Ej (z −1 ), Fj (z −1 ) e Ej+1 (z −1 ), Fj+1 (z −1 ) são soluções da equação (B.2)
têm-se:
Ã(z −1 )Ej (z −1 ) + z −j Fj (z −1 ) = 1
(B.22)
Ã(z −1 )Ej+1 (z −1 ) + z −(j+1) Fj+1 (z −1 ) = 1
(B.23)
e
APÊNDICE B. EQUAÇÕES DIOFANTINAS
120
Subtraindo a equação (B.23) da equação (B.22) obtém-se:
Ã(z −1 )(Ej+1 (z −1 ) − Ej (z −1 )) + z −j (z −1 Fj+1 (z −1 ) − Fj (z −1 )) = 0
(B.24)
Como deg (Ej+1 (z −1 )) = j e deg (Ej (z −1 )) = j − 1 têm-se que (Ej+1 (z −1 )−Ej (z −1 ))
tem grau j e, portanto, pode-se escrever:
(Ej+1 (z −1 ) − Ej (z −1 )) = Ẽ(z −1 ) + ej+1, j z −j
(B.25)
Substituindo-se agora, a equação (B.25) na equação (B.24) chega-se à equação:
Ã(z −1 )Ẽ(z −1 ) + z −j (z −1 Fj+1 (z −1 ) − Fj (z −1 ) + Ã(z −1 )ej+1,j ) = 0
(B.26)
Lembrando que:
• deg (Ã(z −1 )) = na + 1
• deg (Ẽ(z −1 )) = j − 1
• deg (Fj+1 (z −1 )) = deg (Fj (z −1 )) = na
conclui-se, usando identidade polinomial na equação (B.26), que:
Ẽ(z −1 ) = 0
(B.27)
Ej+1 (z −1 ) = Ej (z −1 ) + ej+1,j, z −j
(B.28)
Fj+1 (z −1 ) = z(Fj (z −1 ) + ej+1,j Ã(z −1 ))
(B.29)
ou seja,
e
APÊNDICE B. EQUAÇÕES DIOFANTINAS
121
Agora, substituindo as equações (B.21) e (B.19) na equação (B.29), lembrando que
Ã(z −1 ) é mônico (ã0 = 1), têm-se, por identidade polinomial que:
ej+1, j = fj, 0
fj, i+1 + ej+1, j ãi+1
fj+1, i =
ej+1, j ãi
(B.30)
i = 0, . . . ,(na − 1)
(B.31)
i = na
Analogamente, substituindo as equações (B.20) e (B.18) na equação (B.28) tem-se:
ej+1, i =
e
j, i
ej+1, j
i = 1, . . . ,j − 1
(B.32)
i=j
Por fim, substituindo a equação (B.30) na equação (B.31) e na equação (B.32) obtêmse as recursões desejadas:
ej+1, i =
fj+1, i =
ej, i
fj, 0
f
j, i+1
i = 1, . . . ,j − 1
(B.33)
i=j
+ fj, 0 ãi+1
fj, 0 ãi
i = 0, . . . ,(na − 1)
(B.34)
i = na
Assim, dado Ej (z −1 ) (equação (B.18)) e Fj (z −1 ) (equação (B.19)) calcula-se, a partir
das equações (B.33) e (B.34), Ej+1 e Fj+1 :
Ej+1 (z −1 ) = ej, 0 + ej, 1 z −1 + . . . + ej, j−1 z −(j−1) + fj, 0 z −j
Fj+1 (z −1 ) = (fj, 1 + fj, 0 ã1 ) + . . . + (fj, na + fj, 0 ãna )z −(na −1) + (fj, 0 ãna +1 )z −na
(B.35)
(B.36)
APÊNDICE B. EQUAÇÕES DIOFANTINAS
122
B.4 Algoritmo para o cálculo recursivo das soluções Ej ,Fj :
resumo
Entradas:
• Coeficientes do polinômio mônico Ã(z −1 )
• N ∈N
Inicialização:
e1, 0 = 1
f1, i = −ãi+1
i = 1, . . . ,na
Recursão:
Para j = 1 até N
(
ej+1, i =
(
fj+1, i =
ej, i
fj, 0
i = 1, . . . ,j − 1
i=j
fj, i+1 + ej+1, j ãi+1
ej+1, j ãi
i = 0, . . . ,(na − 1)
i = na
Fim do Para
Saída:
Coeficientes dos polinômios:
• E1 (z −1 ), E2 (z −1 ), . . . , EN (z −1 )
• F1 (z −1 ), F2 (z −1 ), . . . , FN (z −1 )
Referências Bibliográficas
A La Van, D.; McGuire, T.; LANGER, R. Small-scale systems for in vivo drug delivery. Nature
Biotechnology, v. 21, n. 10, p. 1184–1191, 2003.
ACKERMAN, E. et al. Model studies of blood-glucose regulation. Bulletin of Mathematical
Biophysics, v. 27, n. 1, p. 21–37, 1965.
ADA. Insulin administration. Diabetes Care, v. 26, n. Supplement 1, p. S121–S124, 2003.
BELLAZZI, R.; NUCCI, G.; COBELLI, C. The subcutaneous route to insulin-dependent diabetes therapy. IEEE Engineering in Medicine and Biology, v. 20, n. 1, p. 54–64, 2001.
BOLIE, V. M. Coefficients of normal blood glucose regulation. Journal of Applied Physiology,
v. 16, n. 5, p. 783–788, 1961.
CAMACHO, E. F.; BORDONS, C. Model Predictive Control. 1a. ed. London: Springer-Verlag,
2000.
CLARKE, D. W. Application of generalized predictive control to industrial processes. IEEE
Control Systems Magazine, v. 8, n. 2, p. 49–55, 1988.
CLARKE, D. W. Self-tuning control. In: LEVINE, W. S. (Ed.). The Control Handbook. Boca
Raton: CRC Press, 1996. cap. 53, p. 827–846.
CLARKE, D. W.; MOHTADI, C. Properties of generalized predictive control. Automatica,
v. 25, n. 6, p. 859–875, 1989.
CLARKE, D. W.; MOHTADI, C.; TUFFS, P. S. Generalized predictive control - part i. the basic
algorithm. Automatica, v. 23, n. 2, p. 137–148, 1987.
CLARKE, D. W.; MOHTADI, C.; TUFFS, P. S. Generalized predictive control - part ii. extensions and interpretations. Automatica, v. 23, n. 2, p. 149–160, 1987.
COBELLI, C.; CAUMO, A. Using what is accessible to measure that which is not: Necessity
of model of system. Metabolism, v. 47, n. 8, p. 1009–1035, 1998.
COBELLI, C.; TOFFOLO, G.; FERRANNINI, E. A model of glucose kinetics and their control by insulin – compartmental and noncompartmental appoaches. Mathematical Biosciences,
v. 72, n. 2, p. 291–315, 1984.
COHEN, A. New disposable electronic micropump for parenteral drug delivery. In: GURNY,
R.; JUNGINGER, H. E.; PEPPAS, N. (Ed.). Pulsatile Drug Delivery: Current Applications and
Future Trends. Stuttgart: Wissenschaftliche, 1993. p. 151–161.
REFERÊNCIAS BIBLIOGRÁFICAS
124
CUTLER, C. R.; RAMAKER, B. L. Dynamic matrix control - a computer algorithm. In: AIChE
86th National Meeting. Houston, TX, USA: [s.n.], 1979.
CUTLER, C. R.; RAMAKER, B. L. Dynamic matrix control - a computer algorithm. In: Joint
Automatic Control Conference. San Francisco, CA, USA: [s.n.], 1980.
DOMINGUES, H. H.; IEZZI, G. Ágebra Moderna. 3a. ed. São Paulo: Atual Editora, 1995.
FLETCHER, R. Constrained Optimization. [S.l.]: Wiley-Interscience, 1981. (Practical Methods
of Optimization, v. 2).
GANONG, W. F. Fisiologia Médica. 3a. ed. São Paulo: Atheneu, 1977.
GARCIA, C. E.; MORARI, M. Internal model control. i. a unifying review and some new
results. Industrial Engineering Chemical Process Design and Development, v. 21, n. 2, p. 308–
323, 1982.
GARCIA, C. E.; PRETT, D. M.; MORARI, M. Model predictive control: Theory and prectice
- a survey. Automatica, v. 25, n. 3, p. 335–348, 1989.
GARG, S. K.; SCHWARTZ, S.; EDELMAN, S. V. Improved glucose excursions using an implantanle real-time continuous glucose sensor in adults with type I diabetes. Diabetes Care,
v. 27, n. 3, p. 734–738, 2004.
GATTU, G.; ZAFIRIOU, E. Nonlinear quadratic dynamic matrix control with state estimation.
Industrial e Engineering Chemistry Research, v. 31, n. 4, p. 1096–1104, 1992.
GLAD, T.; LJUNG, L. Control theory – Multivariable and Nonlinear Methods. 1a. ed. New
York: Taylor Francis, 2000.
GOPINATH, R. et al. Issues in the design of a multirate model-based controller for a nonlinear
drug infusion system. Biotechnology Progress, v. 11, n. 3, p. 318–332, 1995.
GUYTON, A. C.; HALL, J. E. Fisiologia Humana e Mecanismos das Doenças. 6a. ed. Rio de
Janeiro: Guanabara Koogan, 1998.
HARDY, G. H.; WRIGHT, E. M. An Introduction to the Theory of Numbers. 5a. ed. New York:
Oxford University Press, 2000.
HATCH, A. et al. A ferrofluidic magnetic micropump. Journal of Microelectromechanical Systems, v. 10, n. 215-221, 2001.
HELLER, A. Implanted electrochemical glucose sensors for the management of diabetes. Annual Review of Biomedical engineering, v. 1, p. 153–175, 1999.
HERSTEIN, I. N. Abstract Algebra. 3a. ed. New York: Wiley, 1999.
JARENKO, J.; RORSTAD, O. Advances toward the implantable artificial pancreas for treatment
of diabetes. Diabetes Care, v. 21, n. 3, p. 444–450, 1998.
KUCERA, V. Discrete Linear Control: The Polynomial Equation Approach. 1a. ed. Chichester:
Wiley, 1979.
KUCERA, V. Diophantine equations in control – a survey. Automatica, v. 29, n. 6, p. 1361–
1375, 1993.
REFERÊNCIAS BIBLIOGRÁFICAS
125
KWOK, K. E. et al. Evaluation of a long-range adaptive predictive controller for computerized
drug delivery systems. IEEE Transactions on Biomedical Engineering, v. 42, n. 1, p. 79–86,
1995.
LAGER, W. et al. Electrocatalytic glucose sensor. Medical, biological engineering and computing, v. 32, n. 3, p. 247–252, 1994.
LANDAU, E. Teoria Elementar dos Números. 1a. ed. Rio de Janeiro: Editora Ciência Moderna,
2002.
LEHMANN, E. D.; DEUTSCH, T. A physiological model of glucose-insulin interaction in type
1 diabetes mellitus. Journal of Biomedical Engineering, v. 14, n. 3, p. 235–242, 1992.
LOPES, J. A. Modelagem, Simulação e Controle da Glicemia em Pacientes Diabéticos Hospitalizados. Tese (Doutorado) — USP, São Paulo, 2002.
MACIEJOWSKI, J. M. Predictive Control with Constraints. 1a. ed. Harlow, England: Prentice
Hall, 2002.
MELEIRO, L. A. da C. Projeto e Aplicação de Controladores Baseados em Modelos Lineares,
Neurais e Nebulosos. Tese (Doutorado) — Unicamp, Campinas, 2002.
MORARI, M.; LEE, J. H. Model predictive control: Past, present and future. Computers and
Chemical Engineering, v. 23, n. 4-5, p. 667–682, 1999.
NØRGAARD, M. et al. Neural Networks for Modelling and Control of Dynamic Systems. 1a.
ed. London: Springer-Verlag, 2003.
PARKER, R. S.; DOYLE III, F. J.; PEPPAS, N. A. A model-based algorithm for blood glucose
control in type i diabetic patients. IEEE Transactions on Biomedical Engineering, v. 46, n. 2, p.
148–157, 1999.
PARKER, R. S.; DOYLE III, F. J.; PEPPAS, N. A. The intravenous route to blood glucose
control. IEEE Engineering in Medicine and Biology, v. 20, n. 1, p. 65–73, 2001.
PARKER, R. S. et al. Robust discrete H∞ glucose control in diabetes using a physiological
model. AICHE Journal, v. 46, n. 12, p. 2537–2549, 2000.
PUCKETT, W. R. Dynamic Modeling of Diabetes Mellitus. Tese (Ph.D.) — University of
Wisconsin-Madison, 1992.
PUPO, A. de A. Endocrinologia. In: MARCONDE, M.; SUSTAVICH, D. R.; RAMOS, O. L.
(Ed.). Clínica Médica: Propedêutica e Fisiopatologia. 3a. ed. Rio de Janeiro: Guanabara Koogan, 1984. cap. 15, p. 488–557.
RAWLINGS, J. B. Tutorial overview of model predictive control. IEEE Control Systems Magazine, v. 20, n. 3, p. 38–52, 2000.
RENARD, E.; COSTALAT, G.; BRINGER, J. De la pompe externe à la pompe implantable, la
fermeture de la boucle est-elle possible? Diabetes e Metabolism, v. 28, n. 2, p. S19–S25, 2002.
RICKER, N. L. Model predictive control with state estimation. Industrial e Engineering Chemistry Research, v. 29, n. 3, p. 374–382, 1990.
REFERÊNCIAS BIBLIOGRÁFICAS
126
ROSSITER, J. A. Model Based Predictive Control: a practical approach. 1a. ed. Boca Raton:
CRC Press, 2003.
ROSSITER, J. A.; KOUVARITAKIS, B. Modelling and implicit modelling for predictive control. International Journal of Control, v. 74, n. 11, p. 1085–1095, 2001.
SBD. Consenso Brasileiro sobre Diabetes - Diagnóstico e Classificação do Diabetes Mellitus.
[S.l.], 2000.
SCHÖN, T. Identification for Predictive Control - A Multiple Model Approach. Dissertação
(Mestrado) — Linköping University, 2001.
SHOOK, D. S.; MOHTADI, C.; SHAH, S. L. A control-relevant identification strategy for gpc.
IEEE Transactions on Automatic Control, v. 37, n. 7, p. 975–980, 1992.
SINGH, S. O Último Teorema de Fermat. 4a. ed. Rio de Janeiro: Record, 1997.
SOETERBOEK, R. Predictive Control: a Unified Approach. 1a. ed. Cambridge: Prentice Hall,
1992. (Systems and Control Engineering).
SORENSEN, J. T. A Physiologic Model of Glucose Metabolism in Man and its use to Design
and Assess Improved Insulin Therapies for Diabetes. Tese (Ph.D.) — Massachusetts Institute
of Technology, April 1985.
SPENCE, A. P. Anatomia Humana Básica. 2a.. ed. São Paulo: Editora Manole Ltda, 1991.
STEIL, G. M.; PANTELEON, A. E.; REBRIN, K. Closed-loop insulin delivery – the path to
physiological glucose control. Advanced Drug Delivery Reviews, v. 56, n. 2, p. 125–144, 2004.
TRAJANOSKI, Z. Neural predictive controller for insulin delivery using the subcutaneous
route. IEEE Transactions on Biomedical Engineering, v. 45, n. 9, p. 1122–1134, 1998.
TRAJANOSKI, Z.; REGITTNIG, W.; WACH, P. Simulation studies on neural predictive control
of glucose using the subcutaneous route. Computer Methods and Programs in Biomedicine,
v. 56, n. 2, p. 133–139, 1998.
TYAGI, P. Insulin delivery systems: Present trends and the future direction. Indian Journal of
Pharmacology, v. 34, n. 6, p. 379–389, 2002.
UPDIKE, S. J. et al. Enzymatic glucose sensors. improved lon-term performance in vitro and
in vivo. American Society for Artificial Internal Organs Journal, v. 40, n. 2, p. 157–63, 1994.
WADA, D. R.; WARD, D. S. Open loop control of multiple drug effects in anesthesia. IEEE
Transactions on Biomedical Engineering, v. 42, n. 7, p. 666–677, 1995.
YONZON, C. R. et al. A glucose biosensor based on surface-enhanced Raman scattering: improved partition layer, temporal stability, reversibility, and resistance to serum protein interference. Analytical Chemistry, v. 76, n. 1, p. 78–85, 2004.
ZIERLER, K. Whole body glucose metabolism. American Journal fo Physiology - Endocrinology and Metabolism, v. 276, n. 3, p. 409–426, 1999.
Glossário
Arteriosclerose
Esclerose ou endurecimento de artéria
Aterosclerose
Arteriosclerose em que se formam ateromas nas túnicas íntima,
média, e parte mais interna de artérias de grande e de médio calibre
Depleção
Redução de qualquer matéria armazenada no corpo
Desmielinização
Perda de mielina
Glicogenólise
Decomposição do glicogênio hepático
Glicogênese
Formação de glicogênio a partir da glicose
Gliconeogênese
Formação de glicose a partir das proteínas e de algumas outras
substâncias
Hepactectomizado
Fígado removido cirurgicamente
Hígida
Saudável
Mielina
Substância lipóide que forma a bainha em torno de certos nervos
Monossacarídeo
Açúcar simples, que não pode ser hidrolisado em outros
Nefropatia
Denominação genérica de doença renal
Neuropatia
Designação genérica de doença do sistema nervoso
Oftalmopatia
Qualquer doença ocular
GLOSSÁRIO
128
Pancreatectomizado
Pâncreas removido cirurgicamente
Pós-prandial
Período de algumas horas após uma refeição
FOLHA DE REGISTRO DO DOCUMENTO
1.
CLASSIFICAÇÃO/TIPO
TM
5.
2.
DATA
3.
DOCUMENTO N°
03 de Agosto de 2004 CTA/ITA-IEE/TM-012/2004
4.
N° DE PÁGINAS
128
TÍTULO E SUBTÍTULO:
Controle preditivo de uma bomba de infusão de insulina para regulação da glicemia em pacientes
diabéticos tipo I
6.
AUTOR(ES):
Cleiton Diniz Pereira da Silva e Silva
7.
INSTITUIÇÃO(ÕES)/ÓRGÃO(S) INTERNO(S)/DIVISÃO(ÕES):
Instituto Tecnológico de Aeronáutica. Divisão de Engenharia Eletrônica – ITA/IEE
8.
PALAVRAS-CHAVE SUGERIDAS PELO AUTOR:
Controle Preditivo, GPC, Bomba de Infusão, Diabetes, Glicemia
9.PALAVRAS-CHAVE RESULTANTES DE INDEXAÇÃO:
Controle automático; Predição; Glicose no sangue; Controladores; Análise numérica; Simulação
computadorizada; Diabetes; Avaliação de desempenho; Controle; Medicina
10.
X Nacional
APRESENTAÇÃO:
Internacional
ITA, São José dos Campos, 2004, 128 páginas
11.
RESUMO:
O presente trabalho visa a investigar, via simulação numérica, o desempenho de um controlador preditivo
generalizado aplicado à regulação da glicemia em pacientes diabéticos tipo I, mediante o emprego de
bombas de infusão de insulina. A simulação da dinâmica do sistema endócrino-metabólico em um
paciente diabético tipo I, metabolicamente normalizado, foi realizada através de um modelo não-linear de
19a ordem bastante difundido na literatura. Em pacientes diabéticos tipo I, metabolicamente nãonormalizados, tal dinâmica foi simulada considerando-se variações, em relação aos valores nominais, nos
valores dos parâmetros do modelo anterior. O controlador projetado, quando atuando em um paciente
diabético metabolicamente normalizado, teve o seu desempenho avaliado pelos valores máximos e
mínimos da concentração de glicose no sangue periférico venoso e pelo intervalo de tempo para a
concentração de glicose anterior retornar à faixa de 2% em torno da concentração de referência, após
uma refeição contendo uma quantidade pré-fixada de glicose. Quando o controlador proposto atuava em
um paciente diabético metabolicamente não-normalizado, inicialmente descompensado, o seu
desempenho foi avaliado pelo intervalo de tempo necessário para a glicemia retornar à faixa de 2% em
torno da concentração de referência. O desempenho apresentado pelo controlador proposto neste trabalho
é comparável aos já disponíveis na literatura sendo, entretanto, o controlador proposto aqui mais simples
de ser implementado e menos custoso computacionalmente.
12.
GRAU DE SIGILO:
(X ) OSTENSIVO
( ) RESERVADO
( ) CONFIDENCIAL
( ) SECRETO
Baixar