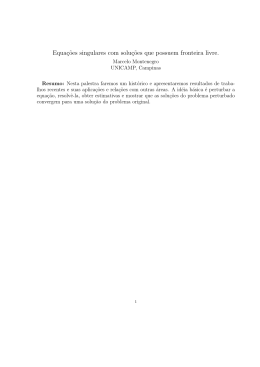
Um estudo sobre abordagens para solução de problemas de localização de dacilidades M. G. Oliveira Technical Report - February RT-INF_001-12 - 2012 - - Relatório Técnico Fevereiro The contents of this document are the sole responsibility of the authors. O conteúdo do presente documento é de única responsabilidade dos autores. Instituto de Informática Universidade Federal de Goiás www.inf.ufg.br Um estudo sobre abordagens para solução de problemas Facility Location Max Gontijo de Oliveira ∗ Cedric L. de Carvalho [email protected] † [email protected] Abstract. This paper is intended to propose a solution to the problem of resource distribution in a predetermined geographic region. For this purpose, techniques and data mining approaches have been studied in order to obtain patterns of demand of the distribution problem you want solved. This type of problem is known in literature as facility location problems, where we seek to find the best locations for new facilities, considering the estimated demand. Keywords: facility location, data mining, clustering algorithms, k-means. Resumo. Este relatório tem o objetivo de apresentar um estudo sobre diversas abordagens que buscam solução para o problema de distribuição de recursos em uma região geográfica pré-determinada. Nesse estudo, as informações de demanda e de possı́veis localizações de uma facilidade terão respaldo de dados históricos referentes ao problema. Assim, o uso de técnicas e abordagens de mineração de dados para o aprendizado é fundamental. Esse tipo de problema é conhecido na literatura como problemas de localização de facilidades (facility location), onde busca-se encontrar as melhores localizações para a inserção facilidades, considerando a demanda existente. Palavras-Chave: facility location, mineração de dados, algoritmos de cluster, k-means. 1 Introdução Decidir sobre como realizar a distribuição de facilidades1 em uma região geográfica limitada (uma cidade, por exemplo), é uma atividade estratégica para muitas organizações. Quando a disponibilização de um recurso envolve um custo muito alto ou o número de recursos disponı́veis é limitado, esse problema fica ainda mais preocupante, pois uma distribuição mal realizada pode acarretar em prejuı́zo certo para a organização. ∗ Mestrando em Ciência da Computação, INF-UFG Orientador 1 Nesse contexto, uma facilidade é um recurso que provê algum tipo de serviço ou produto para atender uma demanda medida ou estimada que, geralmente, está próxima a esse recurso. De modo geral, facilidade e recurso terão o mesmo significado nesse trabalho. † 1 Facility Location 2 Uma distribuição mal realizada de recursos disponı́veis pode ser responsável por uma série de consequências indesejáveis pela organização, como interesse maior de clientes locais à concorrência, dificuldades de atingir metas de qualidade de serviço (prazo para atendimento) e baixo uso do recurso (considerando sua capacidade). Somente para ilustrar, pode-se tomar como exemplo de organizações que se deparam com esse tipo de decisão, redes de supermercados (que precisam decidir onde instalar uma nova filial), empresas que coordenam o serviço de divulgação por panfletagem (que precisam decidir como alocar as pessoas que irão distribuir panfletos), empresas distribuidoras de energia elétrica (que precisam decidir os melhores pontos em uma rede elétrica onde inserir chaves e transformadores), hospitais, postos de saúde, delegacias e semáforos em uma malha rodoviária (que precisam ser distribuı́dos de forma que haja a maior cobertura possı́vel em uma cidade, considerando a demanda e necessidade de cada unidade em uma cada região). Esses problemas de realizar a distribuição de recursos (ou facilidades) em uma região geográfica limitada é caracterizado na literatura como modelos do tipo facility location[?]. De modo geral, esses problemas lidam com recursos que, quando distribuı́dos, sempre permanecerão no local da distribuição. Isso é o caso das organizações que tem que construir edificações para o fornecimento do serviço ou produto. Entretanto, esse trabalho visa atacar problemas onde os recursos distribuı́dos irão se locomover para atender as demandas. Cooperativas de taxi, por exemplo, poderiam oferecer um atendimento mais rápido (e mais barato para a cooperativa) se realizasse a distribuição dos taxistas de forma bem planejada, para que cada demanda recebida pudesse ser mais facilmente atendida. Atendimentos médicos de emergência podem ser realizados cada vez mais rápidos se as ambulâncias estiverem distribuı́das em locais estratégicos. É importante notar que nesse tipo de problema, a facilidade deverá estar preparada para atender a uma demanda local, de modo que chegar a um consumidor não afaste a facilidade demais dos outros consumidores. Segundo Benati e Laporte[?], problemas de otimização modelados como facility location são NP-Difı́ceis, tornando inviável até mesmo a solução de instâncias relativamente pequenas. Dessa forma, esse trabalho visa buscar uma abordagem inteligente embasadas em propostas feitas ao longo do tempo na literatura, de modo que seja viável a geração de boas sugestões de distribuição de recursos de um determinado problema de localização de facilidades. 2 Caracterı́sticas de problemas facility location Os problemas de localização de facilidades abrangem uma grande quantidade de aspectos que podem determinar diversos tipos de modelos e abordagens. Segundo Klose e Drexl[?], os modelos desse tipo de problema podem ser classificados em diversas formas: 1. Organização da região geográfica. A região geográfica pode ser representada como um plano ou o problema pode permitir que a região seja mapeada para um modelo discreto. Uma exploração maior sobre modelos contı́nuos e descritos poderão ser vistos na sessão 3. 2. Objetivos. Os objetivos podem incluir a minimização de uma variável (como a soma do custo de instalação de uma facilidade ou a soma das distâncias entre pontos de demanda e a facilidade mais próxima) ou a maximização de outra (como a cobertura de uma facilidade). Facility Location 3 3. Capacidade da facilidade. Os modelos facility location podem ou não ter que considerar a restrição de capacidade. Essa restrição se refere à capacidade de demanda que uma facilidade tem. De fato, de acordo com Melkote e Daskin[?], modelos que não possuem a restrição de capacidade podem ser vistos como modelos que possuem tal restrição, desde que a capacidade de cada uma das facilidades seja maior ou igual à soma de todas as demandas do problema. Assim, uma facilidade teria capacidade para atender todos os pontos de demanda, podendo então, essa restrição, ser desconsiderada, restando apenas as demais restrições do problema. 4. Quantidade de estágios. A logı́stica de atendimento de demanda pode ter um único estágio ou pode ter vários estágios. Modelos com apenas um único estágio são aqueles onde todas as facilidades atendem diretamente aos clientes da organização. Modelos multi-estágios são aqueles em que, além das facilidades que atendem aos clientes, tem-se ainda facilidades que atendem à outras facilidades, como por exemplo, pontos de abastecimento de estoque. A quantidade de estágios nessa estrutura é determinada pelo problema. 5. Quantidade de produtos/serviços. Os modelos podem contemplar facilidades que forneçam apenas um tipo de produto/serviço ou que forneçam mais de um tipo de produto/serviço. São ainda considerados modelos de um único produto/serviço aqueles modelos em que os diversos produtos/serviços podem ser condensados em um único produto/serviço. 6. Influência da demanda. A maioria dos problemas do tipo facility location consideram que a demanda existe independente da localização das facilidades. Entretanto, em alguns casos, a demanda pode ser influenciada pela existência ou não de uma facilidade. 7. Dinamismo. Modelos podem ser estáticos ou dinâmicos. Modelos estáticos buscam otimizações para perı́odos especı́ficos. Modelos dinâmicos consideram o tempo como fator determinante a ser considerado na otimização. Ainda analisando as classificações de modelos facility location, segundo Farahani, SteadieSeifi e Asgari[?], esses modelos ainda podem ser distinguidos segundo a quantidade de critérios a serem otimizados. Eles apresentam um grande estudo sobre o estado-da-arte de problemas facility location com múltiplos critérios. Assim, as seguintes classificações podem ainda ser acrescentadas à lista: • Modelos com múltiplos objetivos; • Modelos com múltiplos atributos. 3 Modelos contı́nuos e discretos Quando se fala em distribuir facilidades em uma região geográfica, a primeira decisão a ser tomada é de como essa região será organizada. A abordagem e algoritmos utilizados, bem como fatores de performance e complexidade estão totalmente dependentes da forma como essa organização é tratada no problema. Assim, pode-se classificar os modelos do tipo facility location em pelo menos dois grupos: modelos contı́nuos e modelos discretos. 4 Facility Location 3.1 Modelos contı́nuos e o problema de Weber O meio mais natural de se enxergar a solução para a questão é tratar o plano de forma contı́nua, de modo que cada ponto do plano seja uma localização potencial onde pode-se instalar uma facilidade. Partindo dessa premissa, em 1909 A. Weber[?] propôs o problema de encontrar o melhor ponto para instalar uma facilidade, de modo que a soma das distâncias (euclidiana) entre todos os pontos de demanda e a facilidade instalada fosse minimizada. No problema de Weber simples (PWS), a quantidade de facilidades a serem distribuı́das era apenas uma. Dessa forma, dado que dk (x, y) é a distância do ponto de demanda k à facilidade localizada na posição (x, y) e que pk é o peso de um ponto de demanda (podendo ser obtido por uma função que considere diversos aspectos como prioridade, custo, frequência de uso da facilidade, etc.), o problema de otimização poderia ser descrito conforme (1). X pk dk (x, y) (1) v(PWS ) = min(x,y) k∈K Se o plano for dividido em coordenadas discretas, a solução para o problema de otimização (1) poderia ser facilmente implementada com o uso de um simples algoritmo iterativo, como apresentado no Algoritmo 1. Algoritmo 1: PWS (K) Entrada: vetor K[(x1 , y1 ), (x2 , y2 )...] de coordenadas (k x , ky ) dos pontos de demanda Saı́da: coordenadas (x, y) do melhor posicionamento para a facilidade 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 xMaior ← maior valor de coordenada x do vetor K xMenor ← menor valor de coordenada x do vetor K yMaior ← maior valor de coordenada y do vetor K yMenor ← menor valor de coordenada y do vetor K somaMenor ← ∞ para x ← xmenor até xMaior faça para y ← ymenor até yMaior faça soma ← 0 para cada k ∈ K faça soma ← soma+ distância entre pontos (k x , ky ) e (x, y) fim se soma < somaMenor então somaMenor ← soma xS olucao ← x yS olucao ← y fim fim fim retorna (xS olucao, yS olucao) Percebe-se que a quantidade de operações necessárias para se encontrar a melhor solução para o problema de Weber simples é O(x ∗ y ∗ k), onde x é a quantidade de colunas 5 Facility Location do plano, y é a quantidade de linhas e k é a quantidade de pontos de demanda. Assim, o problema de Weber simples possui uma solução iterativa eficiente. Entretanto, é mais comum que problemas reais requeiram a distribuição de mais de uma facilidade no plano. Dessa forma, uma extensão do problema de Weber simples é um problema onde a quantidade de facilidades seja maior que 1. Essa extensão é chamada de problema de Weber com múltiplas fontes (PWM). O problema PWM consiste em distribuir n facilidades em uma determinada região geográfica com os pontos de demanda K e alocar cada ponto de demanda à uma facilidade especı́fica. Esse problema pode ser descrito conforme (2). v(PW M) = min p XX (2a) pk dk (x, y)zk j k∈K j=1 sujeito à p X zk j = 1 ∀k ∈ K, (2b) zk j ∈ {0, 1} ∀k ∈ K, j = 1, ..., p, (2c) j=1 onde zk j indica se o ponto de demanda k está sendo atendido pela facilidade j (zk j assume valor 1) ou não (zk j assume valor 0), enquanto a restrição (2b) garante que somente uma facilidade irá atender um ponto de demanda. Dessa forma, avaliar todas as possibilidades de distribuição de uma facilidade em um plano resultaria na execução de O((x ∗ y ∗ k)n ). Assim, analisando a quantidade de facilidades n, pode-se perceber que a complexidade é exponencial. 3.2 Modelos discretos e modelos em rede Uma grande parte dos problemas de localização podem ser modelados como problemas discretos, tendo em vista que um número limitado de pontos de localização é suficiente para o espaço de busca da solução ótima. Os problemas de rede, por exemplo, constituem de um tipo particular de problemas discreto. Em problemas de localização de facilidades modelados em rede, as distâncias são computadas como a menor distância em um grafo. De fato, muitos problemas de localização de facilidades podem considerar um número limitado de localizações como possı́veis pontos de para a instalação de uma facilidade. Esses pontos são representados em um grafo através dos vértices. Segundo Klose e Drexl[?], um modelo de rede pode ser mapeado com um grafo, onde os vértices representam os pontos de demanda e cada aresta que liga um vértice representa uma ligação entre os dois pontos de demanda no problema real. Nesse contexto, a distância entre um nó e outro é dada pela menor distância entre ambos no grafo. Um subconjunto dos vértices desse grafo e mesmo pontos adicionais inseridos nas arestas do grafo representam os possı́veis pontos de instalação de uma facilidade. Em algumas abordagens, dependendo da função de distância adotada, como a de [?], os pontos de localização de facilidades em potencial podem ser restritos ao próprio conjunto de nós do grafo (pontos de demanda). O problema de localização de facilidades modelado em rede correspondente ao problema de Weber com múltiplas fontes é conhecido como p-mediana. Nesse problema, buscase encontrar a localização de p medianas em um grafo, de modo que a soma das distâncias 6 Facility Location entre todos os vértices (pontos de demanda) e a mediana mais próxima seja minimizada. As medianas encontradas representarão, ao final, a localização das p facilidades que se deseja distribuir. O problema p-mediana pode ser formulado conforme apresentado em (3) XX v(PMed) = min pk dk j zk j (3a) k∈K j∈J sujeito à X zk j = 1 ∀k ∈ K (3b) zk j − y j 6 0 X yj = p ∀k ∈ K, j ∈ J (3c) j∈J (3d) j∈J zk j , y j ∈ {0, 1} ∀k ∈ K, j ∈ J (3e) onde dk j representa a distância no grafo entre os vértices d e j, zk j indica se o ponto de demanda k está sendo atendido pela facilidade j (zk j assume valor 1) ou caso contrário (zk j assume valor 0) e y j indica se foi instalada uma facilidade no vértice j (y j assume valor 1) ou não (y j assume valor 0). Comumente, problemas de distribuição de facilidades em um plano (modelos contı́nuos) podem ser mapeados para um modelo de rede, de acordo com a conveniência em se fazer essa conversão. Para isso, diversas abordagens podem ser utilizadas para a realização desse mapeamento, desde que os pontos de demanda resultem em vértices do grafo e as arestas representem alguma ligação entre esses pontos de demanda. Para problemas onde o negócio da organização pode enxergar os bairros de uma cidade como unidades a serem tratadas individualmente, uma abordagem interessante seria mapear cada bairro para um vértice do grafo e cada fronteira entre os bairros poderia ser representado como uma aresta. O valor de cada aresta nessa abordagem, poderia ser, por exemplo, a distância entre o ponto central de um um bairro ao ponto central do outro. Em uma outra abordagem, o plano poderia ser discretizado em células que representariam os vértices. O problema de distribuição de facilidades em um plano poderia ser mapeado para um problema de distribuição de facilidades em rede com alguns passos: a discretização do mapa em células de tamanho igual; a identificação de células que contenham algum ponto de demanda; a ligação de células vizinhas; o grafo sairia das células (vértices do grafo) e suas ligações com as células vizinhas (arestas do grafo). A Figura 1 mostra os passos dessa conversão. Facility Location 7 Figura 1: Passos para um possı́vel mapeamento de pontos de demanda em um mapa geográfico plotado em um plano cartesiano para uma representação em grafo. Em (a) tem-se a configuração inicial do problema no plano, com a representação dos pontos de demanda distribuı́dos pelo mapa de uma cidade (nesse caso, Goiânia); no passo (b) o mapa é dividido em células de tamanhos iguais (nesse caso, optou-se por dividir em uma grade de 8 x 8); em seguida, em (c), são identificadas as células que não possuem nenhum ponto de demanda e as mesmas são excluı́das do espaço de solução; no passo seguinte (d), cada célula que possui pelo menos um ponto de demanda recebe um vértice (ponto azul) e os vértices gerados são ligados por arestas conforme alguma regra de fronteira entre as células (nesse caso, optou-se como regra, considerar apenas fronteiras nos lados esquerdo, direito, cima e baixo); o grafo gerado passa a ser o resultado da conversão (e), onde cada aresta tem como valor, a distância euclidiana do centro de cada célula ao centro da célula vizinha. É importante notar que cada caso pode ser modelado de acordo com as caracterı́sticas do problema. A quantidade de células bem como a restrição de tamanhos serem iguais podem ser alteradas conforme a necessidade. A polı́tica de atribuição das arestas também pode ser adaptada, permitido, por exemplo, a criação de arestas diagonais ou proibindo a criação de arestas que passem por células sem pontos de demanda. Uma outra possı́vel abordagem poderia considerar identificar clusteres no mapa e mapear cada centroide à um vértice. As arestas poderiam ser atribuı́das conforme alguma regra estabelecida como, por exemplo, a parametrização de uma distância máxima entre dois clusteres para a atribuição de uma aresta entre os mesmos. Muitos problemas de localização de facilidades podem ser naturalmente mapeados para um modelo de rede, sem exigir nenhuma conversão do plano para o grafo. O problema de distribuição de transformadores em uma rede elétrica é um exemplo. Cada transformador deverá abastecer à uma quantidade determinada de pontos de consumo. Assim, cada ponto de consumo representa um vértice em um grafo enquanto as arestas podem ser representadas pelas ligações fı́sicas existentes entre esses pontos de consumo. Um outro exemplo são as linhas de trânsito do transporte coletivo. Tomando como caso as Facility Location 8 linhas de ônibus, o problema está em decidir onde inserir pontos de parada dos ônibus do transporte coletivo de modo que os pontos de demanda (bairros contemplados pela linha) sejam atendidos da maneira mais satisfatória possı́vel. 4 Critérios e objetivos Os modelos de localização de facilidades buscam sempre otimizar algum critério em sua função objetivo. A maioria dos modelos busca atingir um único objetivo. Em geral, trata-se de minimizar uma variável, como a soma das distâncias entre os pontos de demanda e a facilidade mais próxima, ou maximizar a cobertura de atendimento de uma facilidade. Entretanto, diversos problemas podem exigir uma abordagem que considere a otimização de mais de um objetivo. Assim, de acordo com Farahani, SteadieSeifi e Nasrin Asgari[?], os modelos podem ainda ser classificados quanto aos seus objetivos. Antes de buscar uma solução para um problema multi-critério, alguns passos iniciais são necessários: • Verificar conflitos entre os objetivos. Geralmente modelos com mais de um objetivo tendem a ter conflitos em seus objetivos. Como exemplo, um problema pode requerer minimizar a soma das distâncias entre pontos de demanda e a facilidade mais próxima ao mesmo tempo em que pode requerer a minimização da maior distância entre um ponto de demanda e a facilidade mais próxima. • A eficiência de uma solução. Esse ponto é referente ao fato de que uma abordagem deve se preocupar com todos os objetivos, pois uma abordagem só será considerada eficiente se produzir soluções que otimize todos os objetivos, de modo que um objetivo não serja superotimizado em detrimento de outro. • A definição de uma solução preferida. Essa definição auxiliará no desenvolvimento do modelo, de modo que as soluções geradas pela abordagem sejam capazes de gerar aquele tipo de solução. Uma abordagem interessante é a de tentar converter um problema multi-objetivo em um problema com apenas um objetivo. Objetivos comuns para problemas de localização de facilidades, incluem: minimizar o custo total; minimizar a maior distância de um ponto de demanda à facilidade mais próxima; minimizar o custo fixo, que é o custo fixo de instalar uma facilidade em um ponto especı́fico; maximizar a quantidade de serviço; minimizar a média de tempo ou distância percorrida; minimizar o maior tempo ou distância percorrida; minimizar o número de facilidades instaladas, diminuindo assim o custo de investimento; dentre outros objetivos. Farahani[?] divide os problemas de localização com multi-critérios em problemas multi-objetivos e problemas multi-atributos. Os problemas bi-objetivos são aqueles que possuem sempre dois objetivos e, são um caso particular dos problemas multi-objetivos. Os demais problemas dessa classe são chamados de problemas de localização k-objetivos. Esse relatório não se aprofundará no assunto acerca de problemas com multicritérios. Para referências, a revisão da literatura feita por Farahani[?] é bastante vasta e atualizada. Facility Location 5 9 Algumas abordagens e algoritmos para solução de problemas facility location Os problemas de localização de facilidades tendem a abranger uma grande diversidade de possibilidades, podendo alcançar todo tipo de organização e seus vários contextos para seus produtos providos e/ou serviços prestados. Dessa forma, é improvável que exista um algoritmo que resolva todos os problemas de um determinado modelo, sendo a solução, totalmente dependente do problema. Entretanto, existem diversas abordagens que podem ser aplicadas à modelos especı́ficos, auxiliando assim na implementação de uma solução. Essa sessão irá apresentar algumas propostas de abordagens para a solução de alguns problemas de localização de facilidades. 5.1 Clusteres e o algoritmo k-means A distribuição de K facilidades em um plano, como visto na sessão 3.1, é um problema de modelo contı́nuo. Em muitas abordagens para resolver esse tipo de problema, um passo preliminar é encontrar os clusteres existentes no plano. Uma abordagem por força bruta poderia ser definida por encontrar os clusteres por meio de um algoritmo iterativo, como o apresentado no Algoritmo 1. Entretanto, como já mencionado antes na sessão 3.1, essa atividade que avalia todas as possibilidades e encontra os K clusteres seria impraticável dado o número de comparações a serem realizadas. Em 1967, MacQueen[?] introduziu o método k-means. O método k-means é, na verdade, um algoritmo classificador. O seu propósito é o de encontrar clusteres nos dados, onde cada cluster encontrado representa uma classe. Esse método é uma técnica de mineração de dados do tipo não-supervisionada. Isso significa que o k-means não precisa ser parametrizado e nem acompanhado. De modo geral, toda a informação necessária como entrada para esse método restringe-se ao conjunto de dados amostral. A partir desse conjunto, é possı́vel realizar a classificação. Mahajan, Nimbhorkar e Varadarajan[?] apresentaram uma prova de que o problema k-means no plano é NP-Difı́cil, realizando a redução através do problema 3-SAT2 . Portanto, para resolver esse problema, é necessário o uso de boas meta-heurı́sticas que sejam capazes de obter bons resultados em um tempo aceitável. 5.1.1 Abordagens para solução do problema k-means O algoritmo k-means foi concebido inicialmente como uma abordagem não determinı́stica. Trata-se de um algoritmo bastante simples, rápido e eficiente que busca encontrar os centroides dos clusteres e pode ser resumido nos seguintes passos: • Passo 1: Gerar valores iniciais para os centroides. Nesse passo, cada um dos k centroides são distribuı́dos no espaço n-dimensional (geralmente de forma aleatória). • Passo 2: Gerar uma matriz An×k , onde n é a quantidade de pontos de demanda e Ai j tem o valor da distância (geralmente euclidiana) entre o ponto de demanda i e o centroide j. Essa distância considera todos os atributos utilizados para determinar um ponto. No caso do problema de distribuição de facilidades no plano, esses atributos são apenas 2: as coordenadas x e y. 2 O 3-SAT é um problema da classe NP-Completo[?]. Facility Location 10 • Passo 3: Atribuir cada ponto de demanda ao centroide mais próximo. Nesse ponto, o algoritmo termina se nenhum ponto de demanda mudar de centroide em relação ao centroide a que estava atribuı́do anteriormente. Caso contrário, o algoritmo segue para o próximo passo. • Passo 4: Calcular os novos centroides. Cada um dos k centroides é movimentado para o centro de cada cluster. Assim, cada atributo que define as coordenadas de um centroide, assume como valor, a média de todos os valores desse mesmo atributo dos pontos a ele atribuı́dos. • Passo 5: Repetir até a convergência. O algoritmo volta ao Passo 2 a irá continuar sua execução até que seja atingida a convergência. Esse método converge bem rápido. Entretanto, nota-se que a qualidade o resultado está diretamente relacionada à distribuição inicial. Assim, o algoritmo k-means não garante a convergência para a melhor configuração de localização dos centroides. Existem muitas abordagens para encontrar a solução desse problema por meio de artifı́cios que busquem melhorar os resultados alcançados pelo algoritmo k-means. Kaveh, Zadeh e Sahraeian[?], por exemplo, sugerem um algoritmo para resolução de um problema de localização de facilidades que utiliza o k-means para gerar uma solução inicial e, para melhorar os resultados obtidos nessa solução inicial, o algoritmo k-means é executado várias vezes. Contudo, mesmo rodando várias vezes, o k-meanscontinua gerando soluções que convergem para um ótimo local, quando o desejado é um resultado que venha a convergir para um ótimo global. Assim, existem diversas abordagens propostas para a busca de uma convergência global. Somente para ilustrar, algumas serão apresentadas a seguir. Em 1999, Krishna e Murty[?] propuseram uma versão do k-means utilizando algoritmos genéticos e que gera resultados que convergem para um ótimo global. Nesse algoritmo, que foi batizado de GKA (Genetic K-Means Algorithm), a codificação do cromossomo utilizada foi um vetor C de tamanho n, onde n é a quantidade de pontos e cada Ci assume um valor de 1 à k. Assim, cada cromossomo representa os pontos e a qual centroide cada um está ligado. Essa codificação só é possı́vel porque cada ponto só pode estar relacionado a um e somente um dos k centroides. A população inicial é criada a partir de configurações aleatórias e execuções do kmeans clássico. A mutação ocorre selecionado alguns pontos de uma solução e somando ao complemento de outra solução, tendo assim, uma nova solução. A partir daı́, os k centroides são então recalculados novamente, baseando-se na sua nova configuração. A convergência é atingida depois de um número parametrizado de iterações. Yi Lu, Shiyong Lu, Fotouhi e DengBrown[?] criaram, em 2004, melhorias para o GKA e batizaram o novo algoritmo de FGKA (Fast Genetic K-means Algorithm). Assim como seu antecessor, o FGKA também converge para um ótimo global mas, segundo os autores, o algoritmo faz isso muito mais rápido, graças às mudanças nos operadores de mutação e seleção. Likas, Vlassis e Verbeek[?] propuseram um algoritmo com convergência global que possui um tempo de processamento consideravelmente mais longo que o k-means clássico, mas ainda assim, com um bom desempenho. Trata-se de um algoritmo iterativo que executará o k-means diversas vezes seguindo uma estratégia bem definida. Primeiro, o k-means clássico é rodado com k = 1 para se encontrar a solução ótima para k = 1. Em seguida, o k-means é rodado N vezes para k = 2, obedecendo a seguinte Facility Location 11 regra: a posição inicial do primeiro centroide é sempre a posição ótima para k = 1 calculada anteriormente. A posição inicial do segundo centroide é aleatória para a primeira rodada do k-means e, a partir da segunda rodada, a posição inicial do segundo centroide passa a ser a localização final do mesmo centroide na rodada anterior. Assim, à medida em que vão sendo adicionados centroides para que o algoritmo k-means execute N vezes com a nova quantidade de centroides, a estratégia de posicionamento inicial dos centroides continua a mesma: quando k = j, o algoritmo k-means irá ser executado N vezes e, nessas N vezes, os primeiros j − 1 centroides assumem como posição inicial, a posição ótima encontrada para k = j − 1, enquanto o j-ésimo centroide inicia em uma posição aleatória na primeira rodada do k-means e, a partir da segunda rodada até a última, a sua posição é a posição ótima encontrada na rodada anterior. Esse algoritmo termina sua execução quando executa a última das N rodadas para a quantidade de centroides k desejada. Uma grande vantagem desse algoritmo é que, além de resolver o problema k-means , encontrando uma solução que converge para um ótimo global, ainda possibilita resolver um outro problema: encontrar a quantidade de centroides necessárias para minimizar o custo total. Ou seja, encontrar o valor de K. O mesmo algoritmo aqui descrito poderia ser executado sem se limitar à quantidade K. Assim, o ponto de parada seria o valor do custo desejado. O retorno seria o valor K e o posicionamento desses centroides. 5.2 Busca Tabu Al-Sultan e Al-Fawzan[?] apresentaram uma abordagem baseada em uma Busca Tabu para resolver o problema de localização de facilidades sem restrição de capacidade e sugerir a quantidade de facilidades a serem instaladas. No problema atacado pelos autores, o custo de instalação de uma facilidade é levado em consideração. Nessa abordagem, além das informações atuais, um breve histórico de soluções encontradas é armazenado para evitar um recálculo desnecessário. Assim, essas soluções armazenadas passam a compor os movimentos tabu4 . Primeiramente, busca-se uma solução inicial para o problema. Para essa solução inicial, cada ponto de demanda passa a ser atendido pela facilidade instalada mais próxima. Em seguida, começa a fase de remoção de facilidades. Nessa fase, cada facilidade é analisada quanto à possibilidade de sua remoção. A remoção vai acontecer se o custo total da solução (soma das distâncias de pontos de demanda à facilidade mais próxima e soma dos custos de instalação das facilidades) diminuir com a remoção da mesma. Após a criação dessa solução inicial, é iniciada a busca de soluções vizinhas melhores. Essa abordagem não é amarrada e deixa aberta a forma como essa exploração é realizada. Uma possibilidade é a de substituir algumas facilidades por outro ponto aleatório. Outra maneira de formular a vizinhança é considerar que cada nova solução alcançada pelo movimento de uma unidade de espaço de uma facilidade rumo à alguma direção faz parte 3 3 Busca Tabu (Tabu Search)[?] é um método meta-heurı́stico de busca de soluções para problemas exponenciais que utiliza alguns artifı́cios para evitar que a busca convirja muito precocemente, dando ao algoritmo, mais tempo para explorar novas soluções, seguindo caminhos de soluções piores do que a melhor encontrada até o momento. A Busca Tabu utiliza uma lista de soluções visitadas (Lista Tabu) que visa evitar que soluções recentes sejam recalculadas. O critério de parada é uma quantidade k de passos dados sem encontrar nenhuma nova solução que seja melhor. 4 Em uma busca tabu, um movimento tabu é aquele que não pode ser realizado. Em outras palavras, é uma solução que não pode ser considerada na busca, pois passar nessa solução novamente iria gerar um ciclo e, consequentemente, a convergência. 12 Facility Location da vizinhança atual. Por fim, a abordagem assume que o algoritmo deve parar quando atingir algum limite de iterações sem que haja melhoria nas soluções encontradas. 5.3 Aproximações para o problema das p-medianas O problema das p-medianas, formulado em (3), é objeto de constante pesquisas e existem diversos trabalhos que apresentam abordagens para a solução desse tipo de problema. A seguir, algumas dessas abordagens serão apresentadas. 5.3.1 Algoritmo de Teitz e Bart Dado um conjunto V de nós (vértices) em uma rede, Teitz e Bart[?] apresentaram um algoritmo simples para o problema das p-medianas, onde espera-se encontrar um subconjunto V 0 (onde |V 0 | = p) dos nós da rede de modo que a soma de todas as distâncias entre os nós de V e o nó de V 0 mais próximo fosse minimizado. Esse algoritmo, é inicializado com uma solução S aleatória tal que S ⊂ V e |S | = p. A partir dessa solução inicial, é realizada uma varredura pelos demais vértices do conjunto V, objetivando encontrar um vértice vi ∈ (V − S ) que possa substituir um vértice v j ∈ S tal que a soma das distâncias entre todos os nós de V e o nó mais próximo em (S ∪ vi ) − v j seja menor que a soma das distâncias entre todos os nós de V e o nó mais próximo em S . O algoritmo termina quando não houver mais nenhuma substituição que produza uma soma de distâncias menor que a atual. É notório que esse algoritmo busca encontrar uma melhor solução, mas pode demorar muito para convergir. Assim, muitas outras meta-heurı́sticas surgiram para buscar boas aproximações sem demandar muito tempo para a convergência. Uma alternativa é relaxar o problema em alguma de suas restrições. A seguir, será apresentada a relaxação lagrangeana/surrogate, que se mostra bastante conveniente para resolver o problema de localização de facilidades. 5.3.2 O uso da relaxação lagrangeana/surrogate Senne, Lorena e Pereira[?] propuseram um algoritmo branch-and-price 5 que faz uso da relaxação lagrangeana/surrogate 6 para resolver o problema das p-medianas. Nesse trabalho, o problema das p-medianas foi convertido em um problema de partição de conjuntos com uma restrição de cardinalidade. O problema então passa a ser formulado como em (4). v(S PPmed) = min m X ck xk (4a) k=1 sujeito à 5 Branch-and-price é um método de geração de colunas em uma árvore de busca proposto por Barnhart[?]. 6 A relaxação lagrangeana/surrogate é um tipo de relaxação voltada para diversos problemas de otimização de programação inteira, incluindo problemas de localização. Essa relaxação foi criada por Greenberg e Pierskalla[?] 13 Facility Location m X k=1 m X Aik xk = 1 ∀i ∈ S , (4b) xk = p, (4c) xk ∈ {0, 1}, (4d) k=1 onde N é o conjunto de todos os nós da rede, S = {S 1 , ..., S m } é o conjunto de todos os subconjuntos de N, A = [aik ]n×m é uma matriz que indica a qual subconjunto pertence cada nó (aik = 1 se i ∈ S k e aik = 0 caso contrário), xk indica se o subconjunto k foi selecionado P como parte da solução e ck = min j∈S k ( i∈S k di j ). A relaxação utilizada pelos autores foi na substituição da restrição (4d) pela restrição xk ∈ [0, 1]. 5.4 Aproximações para o problema das p-medianas capacitado Uma restrição bastante recorrente em muitos problemas de localização de facilidades é a capacidade que uma facilidade tem para poder atender os pontos de demanda. Os algoritmos clássicos para solução de problemas de localização geralmente não consideram a capacidade de atendimento e, dessa forma, podem gerar soluções ótimas, porém, inviáveis. Dessa forma, a restrição de capacidade deve ser sempre levada em consideração, quando o problema do mundo real tem essa restrição. Exemplos clássicos de facilidades que possuem essa caracterı́sticas são as redes de telefonia e redes elétricas, onde cada facilidade (uma antena ou um transformador) tem uma capacidade que limita o tamanho da demanda que pode atender. Portanto, para resolver problemas dessa natureza, algoritmos mais elaborados se fazem necessários. Kaveh, Zadeh e Sahraeian[?] introduziram um algoritmo hı́brido, que mescla o uso do algoritmo k-meanscom o algoritmo FNS (Fixed Neighborhood Search). Esse algoritmo tem o objetivo de resolver o problema das p-medianas capacitado no qual cada ponto de demanda pode ser alocado a somente uma facilidade. A formulação do problema é apresentada em (5) XX v(CPMed) = min ci j xi j (5a) i∈N j∈J sujeito à X xi j = 1 ∀i ∈ N, (5b) j∈J X y j = p, (5c) j∈J X ci j xi j 6 b j y j ∀ j ∈ J, (5d) ∀i ∈ N, ∀ j ∈ J, (5e) i∈N xi j ∈ {0, 1}, y j ∈ {0, 1} onde xi j assume valor 1, se o ponto de demanda i está alocado à facilidade j e 0, caso contrário; y j indica se no ponto j foi (assume valor 1) ou não (assume valor 0) instalada uma facilidade; e b j representa a capacidade da facilidade j. A restrição (5d) é o que Facility Location 14 garante que a capacidade da facilidade j jamais irá ser extrapolada pela demanda alocada à ela. O algoritmo proposto utiliza o algoritmo k-means para gerar uma solução inicial, que irá servir de entrada para o algoritmo FNS. Como já mencionado antes, o k-means é um algoritmo que não garante a solução ótima. Por essa razão, a abordagem utilizada executa o k-means 20 vezes iniciando o mesmo em posições aleatórias. Evidentemente, a quantidade de clusteres que se deseja encontrar é p (K = p). Para otimizar os resultados, garantindo que será encontrada a mediana, o k-means executado aqui tem a função de distância alterada. O valor utilizado para comparação é a distância elevada ao quadrado. Assim, garante-se que a mediana será encontrada. Depois de executar o k-means 20 vezes, o algoritmo seleciona a melhor solução. Então, para cada um dos k clusteres identificados isoladamente, é executado um algoritmo simples de solução do problema p-mediana (p = 1) com a finalidade de encontrar o melhor nó para cada um dos k clusteres encontrados. Nesse ponto, o algoritmo tem a sua solução inicial S . No próximo passo, o algoritmo FNS é executado com a solução inicial S . Aqui, o conceito de vizinhança é definido como: “a k0 -ésima vizinhança de uma solução são todas as soluções que diferem da solução corrente em exatamente k0 facilidades.” Dada uma função f (x) que retorna o valor do custo total de uma solução x, o algoritmo FNS pode ser descrito conforme os passos do Algoritmo 2. Algoritmo 2: FNS (k0 , maxiter, N) Entrada: valor inteiro k0 que vai determinar o tamanho da vizinhança; maxiter (que vai indicar quando o algoritmo irá parar); o conjunto de pontos de demanda N Saı́da: solução S contendo os pontos de localização das facilidades 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 S ← solução inicial do problema dada pelo algoritmo k-means enquanto Não convergir faça Vizk0 (S ) ← a k0 -ésima vizinhança de S para cada S 0 ∈ Vizk0 (S ) faça se f (S 0 ) < f (S ) então S ← S0 r←1 sai do laço “para cada” fim se f (S 0 ) > f (S ) então r ←r+1 se r > maxiter então retorna S fim fim fim fim Esse algoritmo foi então adaptado para o problema das p-medianas capacitado para otimizar a escolha das novas soluções[?]. Facility Location 15 A primeira alteração foi na forma como os nós são selecionados no momento em que a k0 -ésima vizinhança é gerada. No algoritmo FNS original (Algoritmo 2), todas as possibilidades seriam geradas. A modificação realizada exclui alguns pontos do espaço de busca. E isso pode ser feito de duas formas diferentes. Na primeira, k0 pontos são removidos da solução corrente e, a seleção dos novos k0 pontos irá considerar todos os demais pontos que não possuem facilidade instalada, com exceção dos h nós mais próximos de cada um dos k0 pontos selecionados. O valor de h deve ser parametrizado empiricamente, por tentativa e erro. A segunda alternativa é excluir os pontos mais periféricos, pois esses tendem a não serem escolhidos para a solução final. Aqui, mais uma vez, os limites de periferia devem ser parametrizados empiricamente. A Figura 2 mostra o resultado dessas duas abordagens para a exclusão de pontos na geração da vizinhança. Figura 2: Identificação de nós candidatos à substituição na geração da vizinhança. Inicialmente, tem-se a solução corrente (a) onde os pontos azuis representam as facilidades instaladas. Para k0 = 2, em (b), (c) e (d), são selecionadas duas facilidades para serem removidas. Em (b), a vizinhança passa a ser gerada a partir de todos os demais pontos (brancos). Em (c), para um h = 3, são selecionadas os três pontos mais próximos para serem excluı́dos do espaço de solução (pretos). Em (d), as linhas pontilhadas delimitam as margens periféricas, onde estarão os pontos excluı́dos. A segunda alteração no algoritmo FNS foi o critério de parada. Antes, o critério de parada era quando atingia a quantidade de iterações realizadas sem melhoria no custo total. Agora, todas as k0 soluções da vizinhança deverão ser analisadas e o algoritmo só para se nenhuma dessas soluções for melhor que a solução corrente. Por fim, a última alteração realizada foi a adição de memória ao algoritmo, acrescentando uma lista tabu para armazenar soluções e evitar o recálculo de soluções já visitadas. Facility Location 6 16 Aplicações É notória a aplicação de modelos facility location a problemas de distribuição de facilidades em uma região geográfica. Entretanto, de acordo Klose e Drexl[?], uma série de ouras possı́veis aplicações podem fazer uso dos modelos de localização de facilidades. A análise de clusteres para a identificação de classes distintas baseando-se em atributos diversos de uma grande quantidade de dados é uma atividade que já foi mapeada como um problema das p-medianas. A seleção de vendedores e a alocação dos mesmos aos produtos pode ser mapeado para um modelo de localização. Identificar um conjunto de vendedores para vender um determinado produto representa um problema de multi-critérios, onde devem ser levados em conta a experiência do vendedor, o preço do produto que se deseja alocar, a qualidade do mesmo, dentre outras. Em alguns problemas, a organização não deseja oferecer um produto/serviço para uma demanda especı́fica, mas explorar um produto/serviço de diversas fontes. Um exemplo de casos assim é o de encontrar a melhor localização para plataformas de exploração de petróleo. Se o custo de instalação de uma plataforma fosse irrelevante, certamente haveriam plataformas por toda a região que fosse rica em petróleo. Entretanto, esse custo é muito relevante e, encontrar a melhor localização para a instalação de p plataformas, bem como o tamanho de cada uma, pode ser facilmente mapeado para um problema de localização de facilidades. A localização de um servidor de banco de dados em uma rede de computadores pode ser mapeada para um problema de p-medianas onde p = 1 em uma rede. Assim, pode-se perceber que diversos problemas que, a princı́pio, não parecem se enquadrar em algum modelo facility location, poderiam ser mapeados para um problema de localização e ser resolvido com a ajuda de alguma das tantas abordagens que já foram publicadas. 7 Conclusão O problema de localização de facilidades em uma região geográfica é pertinente aos mais diversos tipos de organizações: indústrias que buscam viabilizar o fornecimento de produtos industrializados aos distribuidores, sem inviabilizar o recebimento de matéria prima; grandes organizações comerciais, como redes de supermercado, que visam atender o maior número de clientes; empresas de distribuição de energia elétrica; órgãos de saúde e segurança pública; empresas de transporte; dentre outros tantos tipos de organizações, cuja qualidade do serviço está diretamente ligada à uma distribuição ótima de facilidades. Tais problemas de localização são conhecidos como NP-Difı́cil. Assim, uma grande atenção tem sido voltada para essa área da Pesquisa Operacional. Não é uma necessidade recente, sendo ela estudada desde o inı́cio do século XIX[?]. Entretanto, um grande salto, no que diz respeito à quantidade de pesquisas realizadas e abordagens sendo criadas, aconteceu nos últimos quinze anos, com um grande interesse sobre o assunto sendo cada vez mais evidente. Contudo, mesmo diante de tanto empenho por parte da comunidade de Pesquisa Operacional, fica claro que os diversos modelos de localização de facilidades ainda deixam muitas lacunas, abrindo espaço para novas abordagens. Percebeu-se que, mesmo com a louvável iniciativa de separar os problemas em modelos bem definidos, diversas abordagens poderiam ser bastante eficientes para um tipo especı́fico de problema, mas sendo inviáveis Facility Location 17 para outros tipos. Dessa forma, conclui-se que, embora as abordagens existentes possam ser utilizadas parcialmente, totalmente ou combinadas com outras, cada caso deve ser analisado com suas particularidades. Conclui-se também que existem muitas possibilidades de evolução das pesquisas nessa área, tendo em vista que diversas boas novas abordagens foram propostas com a simples junção de duas ou mais abordagens anteriormente publicadas ou com alguma adaptação e/ou melhorias em cima de uma outra abordagem. 8 Agradecimento À Profa. Dra. Telma Woerle de Lima Soares, pela avaliação do presente texto e pelas sugestões feitas, as quais muito contribuı́ram para a melhoria do texto original. Referências [1] Al-Sultan, K.; Al-Fawzan, M. A tabu search approach to the uncapacitated facility location problem. Annals of Operations Research, 86:91–103, 1999. 10.1023/A:1018956213524. [2] Barnhart, C.; Johnson, E. L.; Nemhauser, G. L.; Savelsbergh, M. W. P.; Vance, P. H. Branch-and-price: Column generation for solving huge integer programs. Operations Research, 46:316–329, 1996. [3] Benati, S.; Laporte, G. Tabu search algorithms for the (r|xp)-medianoid and (r|p)-centroid problems. Location Science 2, 1994. [4] Cook, S. A. The complexity of theorem-proving procedures. In: Proceedings of the third annual ACM symposium on Theory of computing, STOC ’71, p. 151–158, New York, NY, USA, 1971. ACM. [5] Farahani, R. Z.; SteadieSeifi, M.; Asgari, N. Multiple criteria facility location problems: A survey. Applied Mathematical Modelling, 34(7):1689 – 1709, 2010. [6] Glover, F.; Laguna, M. Tabu search, p. 70–150. John Wiley & Sons, Inc., New York, NY, USA, 1993. [7] Greenberg, H. J.; Pierskalla, W. P. Surrogate mathematical programming. Operations Research, 18(5):924–939, September/October 1970. [8] Hakimi, S. L. Optimum Distribution of Switching Centers in a Communication Network and Some Related Graph Theoretic Problems. OPERATIONS RESEARCH, p. 462–475, 1965. [9] Klose, A.; Drexl, A. Facility location models for distribution system design. European Journal of Operational Research, 162(1):4 – 29, 2005. Logistics: From Theory to Application. [10] Krishna, K.; Narasimha Murty, M. Genetic k-means algorithm. Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on, 29(3):433 –439, jun 1999. Facility Location 18 [11] Likas, A.; Vlassis, N.; Verbeek, J. J. The global k-means clustering algorithm. Pattern Recognition, 36(2):451 – 461, 2003. [12] Lu, Y.; Lu, S.; Fotouhi, F.; Deng, Y.; Brown, S. J. Fgka: a fast genetic k-means clustering algorithm. In: Proceedings of the 2004 ACM symposium on Applied computing, SAC ’04, p. 622–623, New York, NY, USA, 2004. ACM. [13] MacQueen, J. B. Some methods for classification and analysis of multivariate observations. In: Cam, L. M. L.; Neyman, J., editors, Proceedings of the fifth Berkeley Symposium on Mathematical Statistics and Probability, volume 1, p. 281– 297. University of California Press, 1967. [14] Mahajan, M.; Nimbhorkar, P.; Varadarajan, K. The Planar k-Means Problem is NP-Hard. In: Das, S.; Uehara, R., editors, WALCOM: Algorithms and Computation, volume 5431 de Lecture Notes in Computer Science, p. 274–285. Springer Berlin / Heidelberg, 2009. [15] Melkote, S.; Daskin, M. S. Capacitated facility location/network design problems. European Journal of Operational Research, 129(3):481 – 495, 2001. [16] Melo, M.; Nickel, S.; da Gama, F. S. Facility location and supply chain management - A review. European Journal of Operational Research, 2009. [17] Payman Kaveh, A. S. Z.; Sahraeian, R. Solving Capacitated P-median Problem by Hybrid K-means Clustering and FNS Algorithm. International Journal of Innovation, Management and Technology, 2010. [18] Senne, E. L. F.; Lorena, L. A. N.; Pereira, M. A. A branch-and-price approach to p-median location problems. Computers & Operations Research, 32(6):1655 – 1664, 2005. [19] Teitz, M. B.; Bart, P. Heuristic methods for estimating the generalized vertex median of a weighted graph. Operations Research, 16(5):955–961, September/October 1968. [20] Weber, A.; Pick, G. Ueber den Standort der Industrien. Ueber den Standort der Industrien. J.C.B. Mohr (Paul Siebeck), 1909.
Download