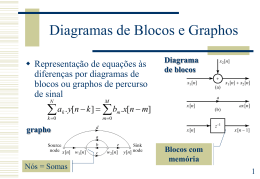
Diagramas de Blocos e Graphos
Representação de equações às
diferenças por diagramas de
blocos ou graphos de percurso
de sinal
N
M
a . y[n k ] b
k 0
k
m 0
m
Diagrama
de blocos
.x[n m]
grapho
Blocos com
memória
Nós = Somas
1
Implementação Directa Tipo I e II
Implementação
directa tipo I
N
(grafos)
M
a . y[n k ] b .x[n m]
k 0
Implementação
directa tipo II
k
m 0
m
a0 1
2
Forma em Cascata
Secções de segunda ordem
Em geral é sempre possível expressar um dado filtro
decomposto em pólos e zeros.
N
M1
H ( z) A
(1 f
k 1
M1
k
M2
z ) (1 g k z 1 )(1 g k* z 1 )
1
k 1
M2
1
1
* 1
(
1
c
z
)
(
1
d
z
)(
1
d
k k
kz )
k 1
k 1
b0k b1k z 1 b2k z 2
H ( z) A
1
2
k 1 1 a1k z a2 k z
Pólos complexos
conjugados
Pólos reais
3
Forma Paralela
Np
N1
Ak
1
1
c
z
k 0
k
H ( z ) Ck z
1
k 0
Bk (1 ek z 1 )
1
* 1
k 0 (1 d k z )(1 d k z )
N1
e0 k e1k z 1
H ( z ) Ck z
1
2
k 0
k 0 1 a1k z a2 k z
Np
1
N1
4
Formas Transpostas
Se trocarmos a entrada com a saída e invertermos as
direcções de todos os ramos de um grapho linear, a
função de transferência não se altera.
H1(z)
H1(z)
H2(z)
H2(z)
Daqui resultam as
formas transpostas
5
Filtros FIR
Realização directa e transposta de filtros FIR
M
y[n] bm .x[n m]
m 0
6
Filtros FIR de Fase Linear
(Generalizada)
Resposta em
frequência:
j
j
H (e ) A(e ) e
j ( )
=0 Fase
estritamente linear
Atraso de grupo constante ( ) d {arg[ H (e j )]}
d
(não há distorção de fase):
Tipo I
Tipo II
Tipo III
Tipo IV
0nM
h[n] h[M n], M par
h[n] h[M n], M impar
h[n] h[M n], M par
h[n] h[M n], M impar
d M / 2
d – atraso de
grupo
(em amostras)
7
Problemas Numéricos
quantização (arredondamentos ou truncagens ....)
Nos coeficientes do filtro
Pode tornar o sistema estável
Modifica a resposta do sistema
Nos sinas
Produz ruído
Diferentes estruturas têm diferentes
comportamentos numéricos
8
Problemas Numéricos
Filtro Elíptico passa banda de ordem 12
Implementação em
cascata
Estrutura
directa
9
Ciclos Limite
Devido aos erros de quantização pode existir
saída sem existir entrada!
Solução:
arredondar em
direcção a zero.
Mas tal aumenta os
erros de
arredondamento!
yˆ [ n] Q[a yˆ[n 1]] x[n]
Resposta Impulsiva para a=-1/2 e
palavras de três bits
Outro
exemplo
a=-3/4
10
Baixar