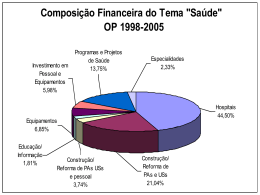
Introdução à Robótica PROF. ANDRÉ LUÍS MARQUES MARCATO E-mail: [email protected] PPEE – Sala 206 – 2102 3460 Apresentação: 07 Cinemática Inversa Curso de “Introdução à Robótica” – Aula Número: 07 – Prof. André Marcato Problema da Cinemática Inversa • • • A equação cinemática direta estabelece uma relação formal entre as variáveis junta e a posição/orientação do efetuador O problema cinemático inverso consiste na determinação das variáveis-junta correspondentes a uma dada posição do efetuador O problema cinemático inverso é mais complexo devido as seguintes razões: As equações a serem resolvidas são, em geral, não lineares e nem sempre é possível encontrar uma solução de forma fechada Podem existir múltiplas soluções Podem existir infinitas soluções (manipulador reduntante cinemáticamente) Podem existir soluções não admissíveis do ponto de vista da estrutura cinemática do manipulador Curso de “Introdução à Robótica” – Aula Número: 07 – Prof. André Marcato Solução do Braço Triplanar Deseja-se encontrar o valor das variáveis junta correspondentes a uma dada posição/orientação do efetuador. É conveniente expressar a posição/orientação em função de um número mínimo de parâmetros. Curso de “Introdução à Robótica” – Aula Número: 07 – Prof. André Marcato Curso de “Introdução à Robótica” – Aula Número: 07 – Prof. André Marcato Descreve a posição do ponto W, ou a origem do Frame 2 Somando e elevando ao quadrado: Curso de “Introdução à Robótica” – Aula Número: 07 – Prof. André Marcato Substituindo nas equações de posição do ponto W, o ângulo pode ser encontrado. Curso de “Introdução à Robótica” – Aula Número: 07 – Prof. André Marcato
Baixar