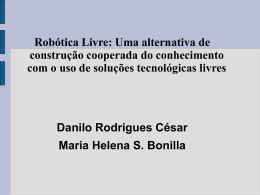
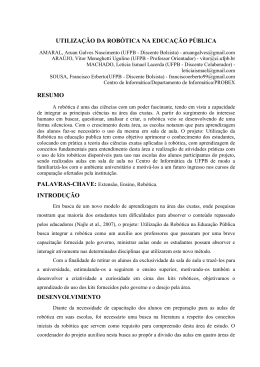
V= XII SEMINÁRIO DA INTERDISCIPLINARIDADE DO CÁLCULO – SINCAL 833 MANIPULADOR ROBÓTICO AUTO-GUIADO CUSTÓDIO, Lucas Henrique de Queiroz¹; SILVA, João Vitor Pereira da²; SOUZA, Patrícia Fernanda¹ 1 INTRODUÇÃO 3 METODOLOGIA A robótica abrange tecnologia da mecânica, da elétrica e da computação. As máquinas robóticas podem ser classificadas de acordo com a sua aplicação, cinemática, tipo de atuadores e autonomia. O grau de interatividade com agentes externos permite classificá-los em autônomos, programáveis, sequenciais ou inteligentes. Os robôs são, em sua grande maioria, máquinas projetadas para substituir o trabalho humano em situações de desgaste físico ou situações perigosas e repetitivas. O braço robótico é composto pelo braço e pulso. O braço consiste de elementos denominados elos unidos por juntas de movimento relativo, onde são acoplados os acionadores para realizarem estes movimentos individualmente, dotados de capacidade sensorial, e instruídos por um sistema de controle. O punho consiste de várias juntas próximas entre si, que permitem a orientação do órgão terminal nas posições que correspondem à tarefa a ser realizada. Na extremidade do punho existe um órgão terminal (mão) destinada a realizar a tarefa exigida. Para alcançarmos o objetivo proposto realizou-se, primeiramente, a revisão bibliográfica sobre o tema. Aplicando os conhecimentos de robótica computacional adquiridos por meio de pesquisa qualitativa, desenvolvemos um protótipo com itens mecânicos, elétricos e eletrônicos, capaz de fazer distinção de cores e de se movimentar de forma autônoma, através da plataforma robótica que é constituída de 4 motores individuais que acionam esteiras, e que por sua vez são controlados por uma unidade de potência variável (ponte H) e ainda possui uma garra robótica que condiciona a manipulação de objetos do meio físico, com isso o robô captura objetos com o braço eletromecânico para depositá-los em determinado local previamente estabelecido, sendo que a posição do mesmo se dará através da aplicação da equação da cinemática direta que é obtida pela adição das projeções das juntas nos eixos cartesianos (conforme a figura 2). Na concepção do software o robô foi desenvolvido para ser autônomo. Todo o sistema é comandado por um micro controlador Atmel Atmega 2560 16Hz Clock. FIGURA 2 - Exemplo de Equação da Cinemática. Fonte: Groover (1989) 4 RESULTADOS FIGURA 1 - Exemplo de braço robótico. Fonte: Groover (1989) 2 OBJETIVOS Identificar as forças em um objeto e, então, aplicar a cinemática para determinar o seu movimento. Nessa perspectiva, o objetivo proposto neste trabalho foi conhecer e dimensionar os limites de alcance de um braço eletromecânico em ação no plano cartesiano, com base no estudo da cinemática e dinâmica de manipuladores robóticos, bem como verificar a utilidade dos mesmos em aplicações industriais. Na conclusão deste projeto, observamos que há aplicabilidade de manipuladores robóticos auto guiados em industrias com linha de montagem de equipamentos diversos e em grandes depósitos. Verificamos que isto é possível pelo fato do equipamento ser programado para reconhecer diversos objetos e devido a sua automação utilizada ser flexível, possibilitando a adaptação a vários processos sem que haja grandes alterações no equipamento, reduzindo custo na produção. 5 REFERÊNCIAS ADADE FILHO, A. Fundamentos de Robótica: Cinemática, Dinâmica e Controle de Manipuladores Robóticos. Apostila publicada pelo ITA-CTA. São José dos Campos,1992. ASADA, H.; SLOTINE, J.J. E. Robot Analysis and Control. New York: John Wiley and Sons,1986. CRAIG, J. J. Introduction to Robotics: Mechanics and Control. 2. ed. New York: AddisonWesley, 1989. GROOVER, M. P. et al. Robótica: Tecnologia e Programação. São Paulo: McGraw-Hill, 1989. 1 Acadêmicos do 2° período do curso de Engenharia de Controle e Automação 2 Acadêmico do 4° periodo do curso de Engenharia de Controle e Automação 3 Orientador: SOUZA, Fidel Edson de SALANT, M. A. Introdução à Robótica. São Paulo: Makron Books, 1988.
Baixar