10
r r
r
r
r r r r
3. u ≠ o e v ≠ o .
Como
u // v ,
temos
u o = ± vo .
Daí,
r
r
|u|r
r r
r v
r
r r
| u | u o = ± | u | r , ou seja, u = ± r v . Assim, se u e v têm mesmo
|v|
|v|
r
r |u|r
r r
sentido podemos escrever u = r v . E se u e v têm sentidos contrários
|v|
r
|u|r
r
temos u = − r v .
|v|
r
Por outro lado, suponhamos que podemos escrever u como combinação
r
r
r
linear de v , ou seja, u = t v . Pela definição de produto de um número
r r
real por vetor, temos que u e v têm a mesma direção, logo são
paralelos.
r r
r
2. Os vetores u, v e w são coplanares se, e somente se, podemos
escrever um deles como combinação linear dos outros.
r r
r
Prova: Suponhamos que u, v e w são coplanares, temos então os
seguintes casos:
r r
1) Um deles sendo o vetor nulo, digamos u = o .
r
r
r
Podemos escrever: u = 0v + 0w .
r r
r r
2) Dois deles são paralelos, digamos u // v e v ≠ o .
r
r
r
r
Podemos escrever: u = mv = mv + 0w , m ∈ IR .
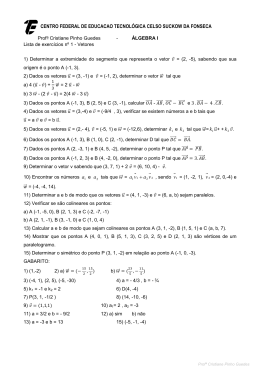
3) Quaisquer dois desses vetores não paralelos.
Vamos considerar a figura ao lado,
onde α é um plano que contém
r r
r
representantes dos vetores u, v e w .
r
v
r
w
α
r
u
→
→
r → r
r
Tomemos
OA
=
v
,
OB
=
u
e
OC
= w . Tracemos
A
→
r
P
pelo ponto C uma reta paralela ao vetor OB = u ,
C
que intercepta a reta OA no ponto P. Assim
O
→
→ →
r
B
podemos escrever: w = OC = OP + PC .
→
→
→
→
r
r
v
Como OP // OA e PC // OB temos: w = mv + nu, m,n ∈ IR .
11
r
r
r
Por outro lado, suponhamos que w = mv + nu, n, m ∈ IR . Assim, pela
r r
r
definição de adição de vetores, temos que u, v e w são coplanares.
1.8 Dependência linear
r
Definição 1: Dizemos que um vetor v é linearmente dependente, se
r r
v = o.
r r
Definição 2: Dizemos que dois vetores u e v são linearmente
dependentes se eles são paralelos.
r r
r
Definição 3: Dizemos que três vetores u, v e w são linearmente
dependentes se eles são coplanares.
Definição 4: Dizemos que mais de três vetores do espaço ( IR 3 ), são
sempre linearmente dependentes.
Quando os vetores do espaço não são linearmente dependentes (LD),
dizemos que eles são linearmente independentes (LI).
Exemplos:
Considerando o paralelepípedo de arestas AB, AD e AE, temos:
→
H
G
→
→
2) AB + BC+ CA é LD .
1) AB é LI .
→
→
→
3) AD e AE são LI.
→
E
4) AB e
F
D
C
→
1 →
AB são LD .
2
→
→
5) AB, AD e AE são LI. .
→
→
→
6) AE, AB e DC são LD.
A
B
→
→
→
7) AB, AD e FF são LD.
→
→
→
→
8) AB, BF BC e AG são LD.
12
Propriedades:
r
r r
1. Se um vetor v é LI, então dado u // v , temos que existe um único
r
r
escalar m tal que u = mv .
r
Prova: Como v é LI, temos pela prova da propriedade 1 de 1.7, que
r
r
u = mv e m é único.
r
r
r
2. Se dois vetores v1 e v 2 são LI, então dado v coplanar com
r
r
v1 e v 2 , temos que existe um único par de escalares (m, n), tal que
r
r
v = mv1 + nv 2 .
r r
r
r
r
Prova: Como v , v1 e v 2 são coplanares e, v1 e v 2 são LI, temos
r
r
r
pela prova da propriedade 2 de 1.7, que v = mv1 + nv 2 .
Para mostrar que esses escalares são únicos, vamos supor que existam
r
r
r
r
r
r
m’e n’, tais que : v = m ′ v1 + n ′ v 2 . Então (m − m ′) v1 + (n − n ′) v 2 = o .
(n − n ′) r
r
r r
v 2 . Daí, v1 // v 2 , o
Se m − m ′ ≠ 0 , podemos escrever v1 = −
(m − m ′)
r
r
que contradiz o fato de v1 e v 2 serem LI. Logo, m − m ′ = 0 , ou seja,
m = m′ .
Analogamente podemos mostrar que n = n ′ .
r
r r
r
3. Se três vetores v1, v 2 e v 3 são LI, então dado um vetor v qualquer,
temos que existe único terno de escalares (m, n, p), tal que
r
r
r
v = mv1 + nv 2 + pv 3 .
r r
r
Prova: Suponhamos que v1, v 2 e v 3 são LI, temos então os seguintes
casos:
r r
r
r
r
r
1) v = o . Podemos escrever: v = 0 v1 + 0 v 2 + 0 v 3 .
r
r r
r
r r
2) v paralelo a um dos vetores v1, v 2 e v 3 , digamos v // v1 . Então
r
r
r
r
podemos escrever: v = mv1 + 0 v 2 + 0 v 3 .
r
r r
r
r r
r
3) v coplanar com dois dos vetores v1, v 2 e v 3 , digamos v, v1 e v 2
r
r
r
r
r
r
são coplanares. Assim temos: v = mv1 + nv 2 = mv1 + nv 2 + 0 v 3 .
13
r
r r
r
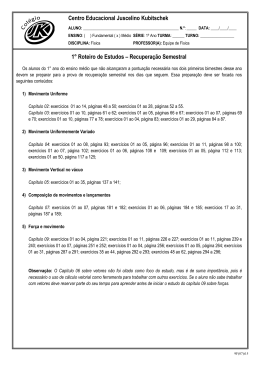
4) v não é coplanar com quaisquer dois dos vetores v1, v 2 e v 3 .
Vamos considerar a figura a seguir, onde α é o plano paralelo ao plano
OA1A 2 passando pelo ponto A. Seja B é o ponto de interseção da reta
OA 3 com o plano α..
A
B
α
r
v
A3
→
→
r
r
r
OB = pv 3 , BA = mv1 + nv 2 .
r
v3
r
v2
O
Temos então:
→
→
r →
v = OA = OB + BA .
→ r
→
Como OB // v 3 e
BA é
r
r
coplanar com v1 e v 2 , temos:
r
v1
A2
r
r
r
r
Logo v = mv1 + nv 2 + pv 3 .
A1
Para mostrarmos que esses escalares são únicos, vamos supor que
r
r
r
r
v = m ′ v1 + n ′ v 2 + p ′ v 3 . Então temos:
r
r
r
r
(m − m ′) v1 + (n − n ′) v 2 + (p − p ′) v 3 = o .
Se m − m ′ ≠ 0 , podemos escrever:
p − p′ r
n − n′ r
r
v3 ,
v1 = −
v2 −
m − m′
m − m′
r
r
r
ou seja, v1 é coplanar com v 2 e v 3 . O que contradiz o fato de
r
r
r
v1 , v 2 e v 3 serem LI. Logo m − m ′ = 0 , ou seja, m = m ′ .
Analogamente podemos mostrar que n = n′ e p = p′ .
1.9 Base – Coordenadas de vetor
r
r
Definição 1: Dado um vetor v LI, dizemos que {v} é uma base para o
r
conjunto de vetores paralelos a v .
14
r
r
r r
Definição 2: Dados dois vetores v1 e v 2 LI, dizemos que {v1 , v 2 } é
r
r
uma base para o conjunto de vetores coplanares com v1 e v 2
r r
r
Definição 3: Dados três vetores v1 , v 2 e v 3 LI, dizemos que
{vr 1 , vr 2 , vr 3 } é uma base para o conjunto de vetores do espaço ( IR 3 ).
Definição 4: Dizemos que uma base é ortogonal, quando seus vetores
são dois a dois ortogonais.
Definição 5: Dizemos que uma base é ortonormal, se ela for ortogonal
e seus vetores unitários.
r r r
Costumamos representar uma base ortonormal por i , j, k .
{
}
r r r
Fixada uma base {v1 , v 2 , v 3 } do espaço, pela propriedade 3 de 1.8, para
r
r
r
r
r
todo vetor v , temos v = mv1 + nv 2 + pv 3 , onde m, n e p são únicos.
r
r
r
r
Dizemos que mv1 , nv 2 e pv 3 são as componentes de v na direção
r r
r
dos vetores v1 , v 2 e v 3 , respectivamente. Os escalares m, n e p
r
r r r
são as coordenadas de v em relação à base {v1 , v 2 , v 3 }.
r
Geralmente, representamos o vetor v através de suas coordenadas, ou
r
seja, v = (m, n , p ) .
Exemplo 1:
Consideremos o cubo ao lado e fixemos a
H
→
G
→
→
base {AB, AC, AE} . Podemos escrever:
E
D
A
→
F
C
→
→
→
→
1. AB = 1 AB+ 0 AC+ 0 AE , daí AB = (1,0,0 ) .
→
→
Analogamente, AC = (0,1,0 ) e AE = (0,0,1) .
B
r r r
Podemos concluir então que, dada uma base qualquer {v1 , v 2 , v 3 }, as
coordenadas desses vetores em relação a esta base são:
r
r
r
v1 = (1,0,0 ) , v 2 = (0,1,0 ) e v 3 = (0,0,1) .
15
→
→
→
→
2. AF = 1 AB+ 0 AC+ 1 AE , daí
→
AF = (1,0,1) .
→
→
→
Observamos que se a base considerada for {AB, AE, AC} , temos
→
AF = (1,1,0) .
→
→
→
→
→
3. AG = 0 AB+ 1 AC+ 1 AE , daí AG = (0,1,1) .
Exemplo 2:
→ → →
r
Consideremos v = (−1,1,1) em relação base {AB, AC, AE} do exemplo
→
→
→
→
v
anterior. Assim, v = − AB+ AC+ AE = AH .
Analogamente ao que foi feito para o conjunto dos vetores no espaço,
podemos fazer para conjuntos de vetores coplanares e colineares.
Assim, um vetor num conjunto de vetores coplanares tem duas
coordenadas e um vetor num conjunto de vetores colineares tem uma
coordenada.
Propriedades:
r
r
r
Seja { v1 , v 2 , v 3 } uma base do espaço. Consideremos os vetores
r r
r
u, v e w , representados através de suas coordenadas em relação a esta
base.
r
r
1. Se u = ( a 1 , a 2 , a 3 ), v = ( b1 , b 2 , b 3 ) e t ∈ IR então:
r r
a) u = v ⇔ a 1 = b1 , a 2 = b 2 e a 3 = b 3 .
r r
b) u + v = ( a 1 + b1 , a 2 + b 2 , a 3 + b 3 ).
r
c) t u = (t a 1 , t a 2 , t a 3 ).
r
r
r
r
r
r
r
r
Prova: a) Como u = a 1 v1 + a 2 v 2 + a 3 v 3 e v = b1 v1 + b 2 v 2 + b 3 v 3 ,
temos:
r
r
r
r
( a 1 − b 1 ) v1 + ( a 2 − b 2 ) v 2 + ( a 3 − b 3 ) v 3 = o
r
Daí,
o = (a 1 − b 1 , a 2 − b 2 , a 3 − b 3 ) .
Logo, a 1 − b1 = 0 , a 2 − b 2 = 0 e a 3 − b 3 = 0 .
De maneira análoga podemos mostrar os itens b) e c).
16
r
r
Observamos que os vetores u = (0, 0, 0) e v = ( b1 , b 2 , b 3 ) são LD,
visto que o vetor nulo é paralelo a todo vetor do espaço.
r
r
2. Sejam u = ( a 1 , a 2 , a 3 ) e v = ( b1 , b 2 , b 3 ) vetores não nulos. Os
r r
vetores u e v são LD se, e somente se, existe um t ∈IR tal que :
a 1 = t b1
a 2 = t b2
a 3 = t b3
r
r
r
r
r
Prova: Se u e v são LD, então u // v . Como v é LI, podemos
r
r
escrever: u = t v , ou seja,
a 1 = t b1
a 2 = t b2
a 3 = t b3.
Por outro lado, se existe t ∈IR , tal que
a 1 = t b1
a 2 = t b2
a 3 = t b3
r
r
r
r
r r
então u = t v . Logo u // v e portanto u e v são LD.
r
3. Três vetores u = (a 1 , a 2 , a 3 ) ,
são LD se, e somente se,
a1
∆ = b1
c1
r
r
v = ( b 1 , b 2 , b 3 ) e w = ( c1 , c 2 , c 3 )
a2
b2
c2
a3
b 3 = 0.
c3
Esta propriedades pode ser demonstrada através de propriedades de
determinantes.
Concluímos que se t não existe na propriedade 2, ou se ∆ é diferente de
zero, na propriedade 3, temos que os vetores considerados nessas
propriedades são LI.
Download