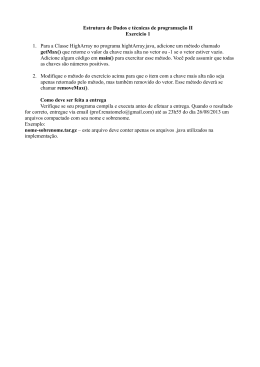
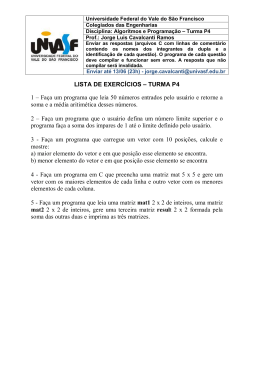
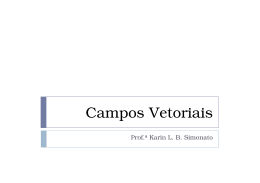
INSTITUTO DE FÍSICA DA UFBA DEPARTAMENTO DE FÍSICA DO ESTADO SÓLIDO DISCIPLINA: FÍSICA GERAL E EXPERIMENTAL IV (FIS 124) INTEGRAL DE LINHA E ROTACIONAL DE UM CAMPO VETORIAL r Seja um campo de velocidades v não uniforme em um meio homogêneo de 1 densidade ρ. Suponha que coloquemos no interior deste campo um tubo constituido 5 de trechos retilíneos, de seção reta constante o qual permite a passagem do fluido 2 4 sem o menor atrito. Suponha ainda que as paredes deste tubo são extremamente porosas de modo que o fluido possa atravessá -las sem que sua velocidade seja 3 alterada significativamente. Num determinado instante, por um processo que não nos interessa agora, as parede do tubo se fecham de modo a não permitir a entrada ou a saida de fluido. Assim, durante um certo instante, o fluido que estava no interior do tubo continua em movimento. A pergunta será: se não há atrito, haverá continuação do movimento? Em outros termos, haverá ou não circulação do fluido? Para respondermos a essa questão, devemos lembrar que este é um problema que envolve r choques, isto é, a massa de fluido contido no lado 1 e que tem velocidade v 1 se choca com a massa de fluido do lado 2, e assim por diante. Para se estudar este tipo movimento escolhemos como ferramenta o momento linear. Assim, se a soma das quantidades de movimento p = m1 v1 + m2 v2+ m3 v3 cos θ3 - m4 v4 + m5 v5 cos θ5 ≠ 0, podemos afirmar que haverá circulação. Observe que nos lados 3 e 5 o vetor velocidade não é paralelo ao respectivo lado, de modo que somente a componente tangencial irá contribuir para a circulação. Observe ainda que podemos reduzir mais ainda estes cálculos. Sabemos que mj = ρ Vj, onde mj e Vj são a massa e o volume do lado j. Se A é a seção reta (constante) do tubo e l j é o comprimento do lado j, então mj = ρ A l j . Definiremos, então a grandeza p/ ρ A como : [circulação] = Γ = v1 l 1 + v2 l 2 + v3 l 3 cos θ3 - v4 l 4 + v5 l 5 cos θ5 Observe que podemos dispensar o recurso do tubo e trabalharmos apenas com os comprimentos, isto é ,com as linhas. Vamos generalizar mais ainda nossos cálculos. Suponha que agora o vetor velocidade forme um certo ângulo com cada lado. Neste caso, apenas a componente tangencial ( isto é, paralela ao lado) da velocidade irá contribuir para a circulação. Esta componente vale vj cos θj, onde θj é o ângulo r formado entre o vetor v j e o vetor comprimento assim definido : 1 v1 l5 θ1 θ5 ⎧módulo = compriment o do lado j l1 r ⎪ ⎪ lj = ⎨direção = paralelo ao lado j v5 l4 θ4 ⎪ ⎪⎩sen tido = horário ou antihorário (arbitrário) l2 v4 θ2 l3 θ3 (1) v2 v3 Na figura acima definimos, arbitráriamente, o sentido horário como sendo positivo. Dessa forma a circulação poder ser reescrita como r r r r r r r r r r Γ = v1 ⋅ l1 + v 2 ⋅ l2 + v 3 ⋅ l3 + v 4 ⋅ l4 + v 5 ⋅ l5 ( É importante notar, na figura acima, como são definidos os ângulos θj. Note que θ1, θ2 e θ5 são agudos r r e os demais são maiores que 90o. Assim o termo v j ⋅ lj é positivo para os lados 1, 2 e 5 e negativo para os r r demais, uma vez que v j ⋅ lj = vj l j cos θj torna-se negativo para 90o< θj < 270o. ) Se tivermos agora uma curva fechada, constituida de N trechos retilíneos, com o campo de velocidades assumindo um valor constante vj no trecho j, a circulação será definida como : N Γ= ∑ r r v j ⋅ lj j=1 1. Integral de linha r Considere uma curva fechada C dentro de um campo vetorial G . Para definirmos a circulação seguiremos os seguintes passos : G a. Dividimos a curva C em pequenos trechos de comprimento Δ l j de modo que ele seja aproximadamente retilineo e que o campo nesse trecho seja aproximadamente C constante. r b. Definimos o vetor Δ lj de acordo com a definição ( 1 ) acima. N c. A circulação será aproximadamente Γ ≅ ∑ r r G j ⋅ Δ lj j=1 r d. Para encontrarmos o valor exato da circulação basta fazer o limite Δ lj → 0. Definimos assim a integral de linha: Γ= ∫ v r G. d l = lim Δl j → 0 N ∑ r r G j . Δ lj j e. A integral de linha também é definida para curvas abertas. A definição é a mesma, com duas pequenas r modificações. A primeira se refere à definição do sentido do vetor d l : neste caso costuma-se definir o 2 sentido positivo ao sentido da trajetória. A segunda modificação se refere à notação. Assim, para uma trajetória sobre uma curva de extremidades A e B, a integral de linha será: ΓAB = ∫ r r G. d l 2. O Rotacional O nosso problema agora, consiste em encontrar a propriedade da circulação num ponto e nas r suas vizinhanças. Seja uma curva C dentro de um campo vetorial G e um ponto P onde desejamos encontrar a circulação. A primeira idéia que surge é a de fazermos a curva tender a zero e calcular a circulação. Contudo, neste caso a circulação tenderá a um valor nulo já que ela é, grosso modo, o campo vezes o comprimento da curva. O caminho correto é dividir a circulação pela área delimitada pela curva e em seguida fazer o limite. Entretanto, para fazermos uma definição correta, devemos levar em conta os seguintes aspectos : • A curva C não necessariamente repousa sobre um plano e assim é difícil imaginá-la "envolvendo" o ponto P. Na realidade, sobre ela se apoiam infinitas superfícies que contém o ponto P. Sendo assim, qual superfície devemos escolher para efetuar a razão ΔΓj /Δ A j (circulação dividida pela área) ? r • Geralmente caracterizamos a superfície Δ A j por um vetor ΔA j , pois a orientação desta superfície é bastante relevante. Esta orientação deverá ser levada em conta em nossa definição. • Corpos em rotação são melhor descritos por vetores (velocidade angular, momento angular, etc.) Como estamos trabalhando com caso semelhante - o rotacional - devemos encontrar, portanto, um vetor. Em vista destas considerações, definimos um vetor rotacional: ∫ ⎡ r ⎢ rotG = nˆ ⎢ lim ⎢ ΔA j →0 ⎣⎢ r r⎤ G.d l l ⎥ ⎥ ΔA j ⎥ ⎦⎥ (2) onde n̂ é um vetor unitário perpendicular à superfície Δ A j que torna a razão ΔΓj /Δ A j máxima. O sentido de n̂ obedece, por definição, a regra da mão direita. n Exemplo : Se a curva C repousa sobre um plano, é fácil ver que o vetor n̂ é perpendicular a este plano, já que a superfície que torna aquela razão máxima pertence C a este plano (pois é mínima quando comparada com as infinitas superfícies que se apoiam sobre C). 3 a. Teorema de Stokes Se dividirmos a superfície que se apoia sobre C em duas parte, obtemos 2 c2 ∫ v r G. d l , então Γ = Γ1 r + Γ2, uma vez que os vetores d l no trecho seccionado são iguais em módulo c1 C contornos fechados C1 e C2. Se a circulação em C é Γ = e direção, mas tem sentidos opostos e se anulam mutuamente. Se dividirmos a curva C ( ou , em outros termos, a superfície que se apoia sobre C - e isto vale para qualquer superfície) em N partes, obtemos: ∫ r r G. d l = r ⎤ G.dl j ⎥ ⎥.ΔA j ΔA j ⎥ ⎦⎥ r r ∑ ∫ G. d l = ∑ ∫ N N j j j ⎡ ⎢ ⎢ ⎢ ⎣⎢ ( 3) Se multiplicarmos a definição de rotacional ( 2 ) escalarmente por n̂ , obtemos: ⎡ r (rot G ). n̂ = ⎢ ⎢ ⎣ lim ΔA j →0 r r G ∫ .d ll ⎤⎥ ΔA j ⎥ ⎦ (4) Assim, se na expressão (3) fizermos o limite Δ A j → 0 , a expressão entre o parênteses é justamente r r (rot G ). n̂ e a somatória, por definição, torna-se em integral de superfície. Sabendo-se que n̂ dA = dA , então: ∫ r r G. d l = ∫ r r (rot G).dA b. O rotacional em coordenadas cartesianas z A definição de rotacional foi feita sem fazer menção a qualquer n sistema de coordenadas em particular. Veremos agora como esta grandeza pode ser expressa em termos de coordenadas cartesianas. Seja então a função vetorial: r r r v G (x,y,z) = Gx(x,y,z) i + Gy(x,y,z) j + Gz(x,y,z) k y x Para obtermos o rotacional dessa função, faremos uma integração através de, por exemplo, um retângulo de lados Δx e Δy como mostra a fugura ao lado. Aplicando a regra da mão direita, veremos que o vetor n̂ , neste caso, coincide com o próprio vetor r de base k . A integral ∫ r r G. d l pode ser calculada somando-se as contribuições de todos os lados, isto é: Γ = Γ1 + Γ2 + Γ3 + Γ4 4 Por outro lado estamos supondo que as dimensões do retângulo sejam tão pequenas de modo que o campo em cada lado seja aproximadamente constante e igual ao valor calculado em seu centro. Assim r r podemos escrever Γ i = G i ⋅ Δ l i r y Os vetores Δ l i serão escritos como: 3 r r r r r r r r Δ l 1 = Δx i Δ l 2 = Δy j Δ l 3 = − Δx i Δ l 4 = − Δy j r r Assim Γ1 = G(1) ⋅ Δ l 1 = G x (1) Δx , onde Gx(1) é o valor da componente r x do vetor G no centro do lado (1). Mas (x,y,z) 4 2 1 x G x ( x, y, z) − G x ( x, y − ∂G x ∂y Δy , z) = ∂y 2 2 Observe que na expressão acima omitimos os termos de ordens superiores, uma vez que no limite r de Δ l → 0 eles serão nulos. Assim, usando a notacão Gi (P) = Gi ( x, y, z) , então ∂G x ∂y ⎤ ⎡ Γ1 = ⎢G x (P) − Δx ∂y 2 ⎥⎦ ⎣ ∂G y Δx ⎤ ⎡ Γ2 = G y (2)Δy = ⎢G y (P) + ⎥ Δy ∂x 2 ⎦ ⎣ ∂G x Δy ⎤ ⎡ Γ3 = −G x (3)Δx = − ⎢G x (P) + Δx ∂y 2 ⎥⎦ ⎣ ∂G y Δx ⎤ ⎡ Γ4 = −G y (4)Δy = − ⎢G y (P) − ⎥ Δx ∂x 2 ⎦ ⎣ Somando-se todos os lados, obtemos r r ⎛ ∂G y ∂G ⎞ x ⎟ G. d l =⎜⎜ − ⎟ Δx ⋅ Δy ∂ x ∂ y ⎝ ⎠ r r G ⋅ d l ⎛ ∂G y ∂G ⎞ x ⎟ então: = ⎜⎜ − ∂y ⎟⎠ ΔA ⎝ ∂x ∫ . Usando ΔA = Δx ⋅ Δy ∫ r Para o limite ΔA → 0 , teremos n̂ = k e r r ⎛ ∂G y ∂G x (rotG) ⋅ k = ⎜⎜ − ∂ x ∂ y ⎝ ⎞ ⎟, ⎟ ⎠ r o que nos dá a componente no eixo z do vetor (rotG) . Para encontrarmos as outras componentes, seguimos o mesmo raciocínio e encontraremos finalmente: r ∂G y ⎛ ∂G (rotG) = ⎜⎜ z − ∂z ⎝ ∂y ⎞ v ⎛ ∂G x ∂G z ⎞ r ⎛ ∂G y ∂G x ⎟⎟ i + ⎜ − − ⎟ j + ⎜⎜ ∂x ⎠ ∂y ⎝ ∂z ⎠ ⎝ ∂x ⎞ r ⎟⎟ k ⎠ 5 Podemos reescrever esse vetor através do operador nabla: r ∂ r ∂ r ∂ r i+ j+ k ∇= ∂z ∂y ∂x r r r rot G = ∇ X G = r i r j r k ∂ ∂x ∂ ∂y ⎛ ∂G z ∂G y ∂ = ⎜⎜ − ∂z ∂z ⎝ ∂y Gx Gy Gz ⎞ v ⎛ ∂G x ∂G z ⎞ r ⎛ ∂G y ∂G x ⎟⎟ i + ⎜ − − ⎟ j + ⎜⎜ ∂y ∂x ⎠ ⎝ ∂z ⎠ ⎝ ∂x ⎞ r ⎟⎟ k ⎠ BIBLIOGRAFIA 1. Purcell E.M., Curso de Física de Berkeley - vol.2, Ed. Edgard Blucher, 1973, São Paulo 2. Feynmam R., Lectures on Physics - vol. 2, Fondo Educativo Interamericano, 1972, Bogota 3. Hsu, H.P., Análise vetorial, Livros Técnicos e Científicos, 1972, Rio de Janeiro. 6
Baixar