.
Introdução à
Geometria Projetiva
Com tratamento vetorial
Abdênago Alves de Barros
Plácido Francisco de Assis Andrade
Universidade Federal do Ceará
Centro de Ciências
Departamento de Matemática
i
Prefácio
Este livro foi elaborado para ser um texto de ”Introdução à Geometria Projetiva”, disciplina obrigatória para os alunos do terceiro perı́odo dos cursos de Licenciatura e de Bacharelado de Matemática da Universidade Federal do Ceará. O
pré-requisito é Geometria Analı́tica com tratamento vetorial. Foi dentro desta moldura que foi elaborado, mas ele é auto suficiente no que diz respeito à sua leitura.
A escolha do tratamento vetorial nos obriga a uma rápida introdução de Álgebra
Linear. Para isto, escolhemos um extrato do livro [An2].
Os tópicos apresentados consideram o desenvolvimento da Geometria do ponto
de vista axiomático, dos gregos até Hilbert, embora nos fixemos na construção de
modelos, fugindo da apresentação sintética. Subjacente à estrutura do texto fica a
trajetória histórica. Os autores não são especialistas em História da Matemática,
portanto, para elaboração desta parte coletamos as informações em vários e, acreditamos, bons livros sobre o assunto. Com isto, tentamos transmitir ao estudante
o esforço desprendido na sistematização da Geometria ao longo de milênios, bem
como tentamos valorizar o estudo da História da Matemática, relegada a um segundo plano nas nossas Graduações.
A apresentação deixa claro as idéias e os conceitos surgidos ao longo do desenvolvimento da Matemática. Além disto, o tratamento vetorial torna o conhecimento accessı́vel a todos estudantes dos primeiros anos da Universidade nas áreas
de Ciências Básicas ou Tecnológicas.
O conteúdo está programado para ser exposto em 50h, sem atropelos. O desenvolvimento culmina com o elegante estudo de cônicas utilizando o Plano projetivo.
Agradecemos aos Professores do Departamento de Matemática da UFC, José
Afonso de Oliveira, Francisco Pimentel, Aldir Brasil, Fernando Pimentel e, particularmente, ao Professor Antônio Caminha pelas correções sugeridas. Ficamos
lisonjeados e em débito com os organizadores da XIII Escola de Geometria 2004USP pelo convite para lecionar um minicurso e pela publicação do texto.
Abdênago Alves de Barros
Plácido Francisco de Assis Andrade
Fortaleza, 23 de maio de 2004
Sumário
I
HISTÓRIA E ARQUITETURA DO TEXTO
1
1 História
1.1 Geometria clássica . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Os Elementos de Euclides . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Os Axiomas de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Arquitetura do texto
2.1 Estrutura do livro . . .
2.2 Genealogia . . . . . . .
2.3 Isometria e Congruência
2.4 Leitura complementar .
II
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ÁLGEBRA LINEAR
3 O espaço vetorial Rn
3.1 O conjunto Rn . . . .
3.2 O espaço vetorial Rn .
3.3 Subespaço vetorial . .
3.4 Independência linear .
3.5 Base e dimensão . . .
3.6 Leitura complementar
2
2
5
8
11
11
12
13
14
18
.
.
.
.
.
.
19
19
21
24
27
29
31
4 Produto interno
4.1 Produto interno e norma . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Ângulo entre vetores . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Produto vetorial em R3 . . . . . . . . . . . . . . . . . . . . . . . . .
33
33
34
36
5 Transformações lineares
5.1 Transformações lineares . . . . . . . . . . . . . . . . . . . . . . . . .
39
39
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
SUMÁRIO
5.2
5.3
5.4
5.5
5.6
5.7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
41
43
44
45
46
47
6 Isometrias do Rn
6.1 Translações . . . . . . . . .
6.2 Operadores ortogonais . . .
6.3 Classificação das isometrias
6.4 *Leitura complementar . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
49
50
51
53
55
III
Matriz . . . . . . . . . . .
Operações . . . . . . . . .
Invertibilidade . . . . . .
Operadores lineares . . . .
Autovalores e autovetores
Teorema espectral . . . .
iii
GEOMETRIA EUCLIDIANA
56
7 Geometria Euclidiana
7.1 Esferas e hiperplanos . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Um modelo de plano Euclidiano . . . . . . . . . . . . . . . . . . . . .
7.3 Um modelo de espaço Euclidiano . . . . . . . . . . . . . . . . . . . .
57
57
59
62
IV
65
GEOMETRIA ELÍPTICA (dupla)
8 Geometria Elı́ptica
8.1 Distância esférica . . . . .
8.2 Plano elı́ptico . . . . . . .
8.3 Retas elı́pticas orientadas
8.4 Plano elı́ptico dual . . . .
8.5 Isometrias de S2 . . . . .
8.6 Congruência . . . . . . . .
.
.
.
.
.
.
66
67
69
72
73
74
75
9 Trigonometria elı́ptica
9.1 Lei dos senos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Área de triângulos . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 *Triângulo dual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
79
81
84
V
86
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
GEOMETRIA PROJETIVA E GEOMETRIA AFIM
10 Geometria Projetiva
10.1 O plano projetivo RP2 . . . . . . . . . . . . . . . . . . . . . . . . . .
87
88
iv
10.2
10.3
10.4
10.5
10.6
10.7
10.8
Relação entre RP2 e S2
Retas projetivas . . . .
Plano projetivo dual .
Incidência . . . . . . .
Geometria Afim . . . .
Retas afins . . . . . .
Leitura complementar
SUMÁRIO
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
89
90
92
92
95
96
99
11 Colineação
11.1 Operador linear e colineação
11.2 Construção de colineações .
11.3 Teorema fundamental . . .
11.4 Teorema de Papus . . . . .
11.5 Teorema de Desargues . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
100
100
102
105
110
113
12 Cônicas
12.1 Cones em R3 . . . . .
12.2 Quádricas . . . . . . .
12.3 Correlações . . . . . .
12.4 Polaridades . . . . . .
12.5 Cônicas em RP2 . . .
12.6 Retas tangentes . . . .
12.7 Construindo cônicas .
12.8 Teorema de Pascal . .
12.9 Teorema de Brianchon
12.10Leitura complementar
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
115
115
118
121
122
124
127
129
133
136
137
VI
APÊNDICE
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
140
13 Partição de conjuntos
141
13.1 Particionando conjuntos . . . . . . . . . . . . . . . . . . . . . . . . . 141
13.2 Relação de equivalência . . . . . . . . . . . . . . . . . . . . . . . . . 144
13.3 Classe de equivalência . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Lista de sı́mbolos
Conjuntos
R. . . . . . . . . . . . . . . . . . . . . . . . . . . .Conjunto dos números reais
Rn . . . . . . . . . . . . . . . . Espaço vetorial das n-uplas ordenadas
E1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Reta Euclidiana
E2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Plano Euclidiano
E3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Espaço Euclidiano
S2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Esfera unitária
S2∗ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Esfera unitária dual
RP2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Plano projetivo
RP2∗ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Plano projetivo dual
AP2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Plano afim
Letras gregas
α . . . . . . . . . . . . . . . alfa
µ . . . . . . . . . . . . . . . mu
β . . . . . . . . . . . . . . beta
ν . . . . . . . . . . . . . . . . . ni
γ, Γ . . . . . . . . . . . gama
ξ, Ξ . . . . . . . . . . . . . qui
δ, ∆ . . . . . . . . . . . delta
ø .................. o
, ε . . . . . . . . . . epsilon
π, Π, . . . . . . . . . . . pi
ζ . . . . . . . . . . . . . . . zeta
ρ, . . . . . . . . . . . . . . . rô
η . . . . . . . . . . . . . . . . eta
σ, Σ, ς . . . . . . . . sigma
θ, Θ, ϑ . . . . . . . . . .teta
τ . . . . . . . . . . . . . . . . tau
ι . . . . . . . . . . . . . . . . iota
υ, Υ . . . . . . . . . upsilon
κ . . . . . . . . . . . . . . . kapa
φ, ϕ, Φ . . . . . . . . . . . . fi
λ, Λ . . . . . . . . . lambda
ψ, Ψ . . . . . . . . . . . . . psi
ω, Ω . . . . . . . . . . ômega
Sı́mbolos clássicos
v = (x, y) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Vetor v ∈ R2
v = (x, y, z) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Vetor v ∈ R3
u, v . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Produto interno canônico de u, v ∈ Rn
v . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Norma de um vetor v ∈ Rn
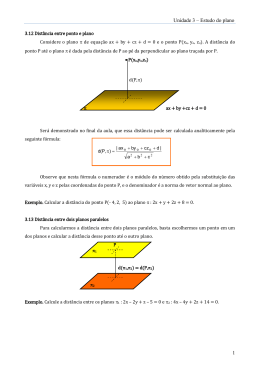
d(p, q) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Distância entre os pontos p, q ∈ Rn
θ(u, v) . . . . . . . . . . . . . Distância entre u, v ∈ S2 ; ângulo entre os vetores u, v ∈ R3
[v1 , v2 , ..., vk ] . . . . . . . . . . . . . . . Matriz n × k cujas colunas são os vetores vi ∈ Rn
[A], [B], [C] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Matrizes com entradas reais
[A(e1 ), A(e2 ), ..., A(en )] . . . . . . . . . Matriz canônica de uma transformação linear
det[A]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Determinante da matriz quadrada [A]
v = (x : y : z) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ponto projetivo v ∈ RP2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Partição de um conjunto
∼ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Relação de equivalência
A/ ∼ . . . . . . . . . . . . . . . . . . . . . .Espaço quociente por uma relação de equivalência
P(A) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .O conjunto das partes de um conjunto A
Sı́mbolos especiais
[[v1 , v2 , ..., vn ]] . . . . . . . . . . . . . . . Subespaço vetorial gerado por v1 , v2 , ..., vn ∈ Rn
ηuv = u × v . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Produto vetorial de u, v ∈ R3
η . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Vetor em R3 normal a um plano
Γη . . . . . . . . . . . . . . . . . . . . . . . Plano em R3 contendo a origem com vetor normal η
Γη (p) . . . . . . . . . . . . . . . . . . . . . . . . . . .Plano em R3 contendo p com vetor normal η
rη = Γη ∩ S2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Reta elı́ptica: grande cı́rculo de S2
rη . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Reta projetiva: subconjunto de RP2
η . . . . . . . . . . . . . . . . . . . . . . . . . . . . Reta projetiva: elemento do projetivo dual RP2∗
Parte I
HISTÓRIA E ARQUITETURA
DO TEXTO
Capı́tulo 1
História
Para deixar claro a estrutura didática na qual o texto está desenvolvido, apresentaremos uma breve história da Geometria. 1
1.1
Geometria clássica
A palavra Geometria tem etimologia grega e significa ”medição de terras”. Na
Antiga Mesopotâmia e no Antigo Egito, o conhecimento geométrico resumia-se a
um aglomerado de procedimentos práticos de mensuração aplicados, principalmente,
na agricultura. Eram cálculos empı́ricos de comprimentos, áreas e volumes com o
emprego de fórmulas, muitas delas erroneamente utilizadas.
Devemos aos gregos a transformação da Geometria de um conhecimento rudimentar e prático num dos ramos da Matemática Pura. Eles tiveram a iniciativa
de abstrair as idéias do contexto fı́sico para o contexto puramente mental, processo
que levou séculos para ser completado, aproximadamente de 600 aC até 300 aC.
O mais antigo grego conhecido que adotou tal postura foi o mercador e engenheiro Tales de Mileto (± 624 aC − ± 547 aC), considerado o primeiro filósofo,
1
Este capı́tulo está baseado nos livro de Boyer [BCB], Heath [Hea], Wallace & West [W-W] e
no site [web1].
1.1. GEOMETRIA CLÁSSICA
3
cientista e matemático grego. Ele empregou argumentos lógicos para demonstrar
proposições básicas de Geometria, muitas delas de sua autoria, que não tinham
importância alguma na medição de terras. Tales foi a origem de uma escola que
perdurou por um século e supõe-se que ele tenha aprendido em suas viagens os rudimentos de Geometria com os povos da Mesopotâmia e Egito. É creditado a ele a
demonstração de resultados tais como:
◦
◦
◦
◦
um cı́rculo é bissectado por um diâmetro;
os ângulos da base de um triângulo isósceles são iguais;
um ângulo inscrito num semicı́rculo é um ângulo reto;
os ângulos opostos pelos vértices são iguais.
Pitágoras de Samos (± 569 aC − ± 475 aC),
possivelmente um aluno da escola de Tales, estabeleceu uma sociedade filosófica e religiosa que
muito contribuiu para a formalização da Geometria com trabalhos nas Teorias de paralelas,
figuras similares e uma combinação de Teoria de
números e misticismo. O próprio Pitágoras introduziu as palavras Filosofia (amor à sabedoria)
e Matemática (o que é aprendido). Após a morte
do filósofo, a escola Pitagórica dividiu-se em duas
facções. Uma, formada por aqueles que aceitavam a palavra do ”mestre” como uma revelação e
a outra, formada por aqueles seguidores que desejavam ”o novo aprendizado”, os matemáticos.
Membros da última facção desenvolveram novos resultados de Matemática exclusivamente por dedução lógica, transformando-a numa Ciência Dedutiva. Sua doutrina sobreviveu por séculos. Ainda na década de 1980 existiam seguidores mı́sticos
em Fortaleza, Ceará, que realizavam suas reuniões num velho casarão do centro da
cidade, na Rua Major Facundo, cuja sede era chamada de Escola Pitagórica.
O avanço seguinte foi estabelecido por outro grego, um professor de Geometria,
Hipocrates de Chios (± 470 aC, Grécia − ± 410 aC), ao escrever um livro texto,
Elementos de Geometria, no qual os teoremas eram arranjados numa sequência onde
os subsequentes eram provados tendo como base os teoremas anteriores. Tudo indica
que sua obra está contida nos Livros I e II dos Elementos de Euclides. Com ele
têm-se o inı́cio da sistematização do conhecimento Matemático, estabelecendo uma
estrutura de apresentação que sobrevive até hoje. Hipócrates de Chios contribuiu
com teoremas sobre circunferências.
Por esta mesma época, foi fundada em Atenas pelo filósofo Platão (± 427 aC−
± 347 aC), a famosa Academia, uma instituição que congregava os maiores sábios
4
CAPÍTULO 1. HISTÓRIA
da época. Sobre seu portão estava escrito:
Não permitam a entrada de quem não saiba geometria.
Com a Academia, a Matemática obteve o status de Ciência Pura, seus membros
não tinham a preocupação em aplicar os conhecimentos adquiridos no seu trabalho
e a ênfase era no desenvolvimento do pensamento matemático e filosófico.
Um dos membros da Academia, dos 17 aos 30 anos, foi o filósofo Aristóteles da
Macedônia (± 384 aC - ± 322 aC). A contribuição de Aristóteles para os fundamentos da Matemática foi indireta, construiu uma teoria de afirmações que começava
com noções comuns, noções especiais, definições e um tratado sobre lógica em Filosofia, estabelecendo a base para toda a Matemática grega. Aristóteles fundou um
centro cientı́fico e filosófico chamado Liceu. Nos seiscentos anos seguintes foram
criadas centenas de Escolas pela região grega mas nenhuma delas comparável em
importância com essas duas, exceto o Museu de Alexandria.
Outro membro da Academia, Eudoxos de Cnido (± 408 aC − ± 355 aC), fez
a moldura de como deve ser uma teoria Matemática, sistematizando formalmente
o método axiomático inspirado no trabalho de Aristóteles. Sua mais notável contribuição foi compreender as quantidades incomensuráveis que tanto pertubou os
pitagóricos. Aceita-se que seu trabalho em Matemática é a base dos Livros V, VI e
XII dos Elementos de Euclides. A Academia foi um centro no qual vários de seus
membros se destacaram na história da Matemática e, em particular, na Geometria:
◦
◦
◦
◦
◦
Teodoro de Cirene (± 465 aC − ± 398 aC),
Teaetetus (± 417 aC − ± 369 aC),
Meneacmus (± 380 aC − ± 320 aC) ,
Dinostrato (± 390 aC − ± 320 aC), irmão de Meneacmus,
Autólicos de Pitane (± 360 aC − ± 290 aC ).
Com a morte de Alexandre da Macedônia, o Grande, (356 aC − 323 aC) aluno
de Aristóteles e Meneacmus, o território conquistado foi dividido entre seus generais.
Alexandria, cidade fundada por ele, ficou no território governado por Ptolomeu I,
1.2. OS ELEMENTOS DE EUCLIDES
5
terras correspondentes ao atual Egito. Este general criou o Museu de Alexandria,2
e transformou-o numa Universidade insuperável em seu tempo, em termos de conhecimento. Para dar uma grandeza da importância do centro, notı́cias da época
falam numa biblioteca de 500 mil volumes. Muito dos intelectuais mudaram-se para
ali, entre eles Euclides.
1.2
Os Elementos de Euclides
Toda esta construção da mente humana, feita ao longo de 300 anos, ficou registrada
numa obra monumental intitulada Elementos, constituı́da de 13 livros (capı́tulos).
Nela, estão demonstradas 465 proposições deduzidas de um sistema axiomático
numa forma didática, cujo único rival em número de traduções é a Bı́blia. Tal obra
expõe sistematicamente toda a Matemática básica conhecida em seu tempo.
Devemos tal façanha ao matemático grego Euclides
(± 330 aC - ± 270 aC) cuja biografia é praticamente
desconhecida. Provavelmente estudou na Academia e
mudou-se para Alexandria a convite de Ptolomeu I
para ser o primeiro professor de Matemática do Museu. Escreveu cerca de doze obras mas somente cinco
delas resistiram ao tempo. Seu texto intitulado Óptica
(Stoichia) foi um dos primeiros trabalhos escritos sobre
perspectiva. A tı́tulo de ilustração listaremos os tı́tulos
dos Livros que compõem a obra de Euclides, que não é
apenas uma simples compilação de resultados conhecidos; supõe-se que várias proposições e provas são do
próprio Euclides e, possivelmente, algumas delas foram acrescentadas posteriormente. A obra não trata apenas de Geometria, inclui também resultados de Aritmética. No Livro IX ficou para a posteridade uma das mais belas e elegantes provas da
Matemática, a prova do teorema: Existem infinitos números primos. Certamente,
um autor de uma obra como os Elementos deveria ser um matemático de primeira
linha. A lenda descreve-o como um professor excepcional, sendo caricaturado na
figura de um velhinho bondoso. Sua proposta didática para o ensino da Matemática
foi espetacular. Ainda hoje, 2300 anos depois, é quase que integralmente adotado
nas Escolas de todo o mundo.
ELEMENTOS Geometria Plana: I. Fundamentos da geometria plana. II. A Geometria de retângulos. III. A geometria do cı́rculo. IV.
2
Local dedicado às nove musas gregas: Calı́ope (Poema épico, a musa mais importante), Clio
(História), Erato (Poemas de amor), Eutherp (Música), Melpomene (Tragédia), Polı́nia (Música
sagrada), Therpsı́core (Dança), Talia (Comédia), Urânia (Astronomia).
6
CAPÍTULO 1. HISTÓRIA
Polı́gonos regulares no cı́rculo. V. A teoria geral de magnitudes em
proporções. VI. A geometria plana de figuras similares. Teoria dos
números: VII. Aritmética básica. VIII. Números em proporções. IX.
Números em proporções; a teoria de números pares e ı́mpares, números
perfeitos. Números irracionais: X. Segmentos de reta incomensuráveis.
´
Geomeria Sólida: XI. Fundamentos da Geometria sólida. XII. Areas
e
volumes; método de Eudoxos da exaustão. XIII. Os sólidos de Platão.
O aspecto que nos interessa é o sistema axiomático adotado por Euclides:
1. Noções comuns
a)
b)
c)
d)
e)
Coisas que são iguais a uma mesma coisa também são iguais;
Se iguais são adicionados a iguais, os totais são iguais;
Se iguais são subtraı́dos de iguais, os restos são iguais;
Coisas que coincidem uma com a outra são iguais;
O todo é maior que qualquer uma de suas partes.
2. Axiomas da Geometria Euclidiana plana3
i) Incidência: pode-se traçar
uma reta ligando quaisquer dois pontos;
ii) Pode-se continuar qualquer reta finita
continuamente em uma reta;
iii) Pode-se traçar um cı́rculo com
qualquer centro e qualquer raio;
iv) Todos os ângulos retos são iguais;
v) Por um ponto fora de uma reta pode-se traçar
uma única reta paralela à reta dada.
3. Definições
i)
23 definições que dizem respeito a ponto,
reta, ângulo, cı́rculo, triângulo, quadrilátero, etc.
A escola de Alexandria sobreviveu até 450 dC e muito contribuiu com o desenvolvimento da Geometria pós-Euclides, sendo seu maior expoente o ex-aluno siciliano
3
O quinto postulado é conhecido como Axioma de Playfair. No livro Elementos é posto um
axioma equivalente: se uma reta ao cortar duas outras, forma ângulos internos, no mesmo lado,
cuja soma é menor do que dois ângulos retos, então as duas retas, se continuadas, encontra-seão no lado onde estão os ângulos cuja soma é menor do que dois ângulos retos.
1.2. OS ELEMENTOS DE EUCLIDES
7
Arquimedes de Siracusa (287 aC − 212 aC) considerado um dos três maiores matemáticos de todos os tempos, junto com o inglês Isaac Newton (1643 − 1727) e o
alemão Johann Carl Friedrich Gauss (1777 − 1855). Seu método para cálculo de
áreas guarda muita semelhança com o Cálculo Integral utilizado nos dias atuais.
Outros notáveis do Museu foram o ex-aluno Apolonius de
Perga (262 aC - 190 aC), com o estudo das cônicas, e
um professor do Museu, Papus de Alexandria (290 dC −
350 dC) que ampliou o trabalho de Euclides, com resultados cujo espı́rito era totalmente diferente do que foi feito
até então, demonstrando teoremas novos que diziam respeito apenas aos axiomas de incidência. Papus foi o último
grande geômetra grego e seu trabalho é tido como a base
da Geometria Projetiva.
A morte de Hipátia de Alexandria (± 370 dC − ± 415 dC)
professora do Museu e primeira mulher a destacar-se no estudo da Matemática, marca os inı́cios do declı́nio daquele
centro como pólo intelectual e do perı́odo das trevas para as
civilizações ocidentais. Hipátia teve morte cruel, foi descarnada com conchas de ostras e queimada em praça pública
por uma turba de cristãos incentivada pelo Patriarca de
Alexandria, Cirilo.
Cem anos depois da morte de Hipátia, em 527 dC, a Academia Platônica de
Atenas já com 900 anos, bem como outras escolas, foi fechada e seus membros
dispersos por Justiniano, Imperador Romano Católico. E por muitos séculos o desenvolvimento da Matemática esteve a cargo de outras civilizações, como a Árabe
cuja maior contribuição foi na Álgebra. O conhecimento geométrico ficou, praticamente, estagnado e esquecido por dez séculos. Acredita-se que com a fuga dos
professores gregos para a Pérsia, a civilização Árabe tomou o impulso relatado nos
livros de História.
8
1.3
CAPÍTULO 1. HISTÓRIA
Os Axiomas de Hilbert
Dezoito séculos depois da publicação dos Elementos (1482), em plena Renascença,
começaram a surgir as primeiras traduções dos Elementos para as lı́nguas européias
modernas, passando aquela obra a receber um estudo crı́tico pelos interessados.
Com a retomada do estudo dos Elementos de Euclides surgiram vários resultados
surpreendentes que diziam respeito apenas à idéia de incidência. Por exemplo,
Girard Desargues (1591 − 1661) e Blaise Pascal (1623 − 1662) demonstraram muitas
propriedades não métricas de cônicas que eram bem diferentes daquelas examinadas
por Apolônio dezoito séculos antes. O estudo de geometrias com poucos axiomas
perdurou por mais dois séculos, às vezes de forma esporádica e desorganizada, outras
com intensidade e imaginação.
Como pano de fundo ficava o postulado das paralelas, a secular dúvida se ele
era ou não um axioma Euclidiano independente dos demais, sendo o mais instigante
tópico de interesse dos geômetras. Muitos acreditaram que podia ser um teorema.
Não é! Ao longo da história muitas demonstrações, erradas é claro, foram apresentadas, inclusive por matemáticos importantes em sua época. Ainda no tempo de
Euclides, Ptolomeu I acreditou que tinha dado uma demonstração para o Axiomas
das Paralelas e tudo leva a crer que o próprio Euclides ficou relutante em aceitálo como postulado, utilizando-o apenas a partir da 29a proposição dos Elementos.
Algumas tentativas foram dramáticas, como aquela feita pelo padre jesuı́ta italiano
Giovanni Saccheri (1667 − 1773). Simplesmente ele demonstrou todos os resultados básicos da hoje chamada Geometria hiperbólica, mas não teve a ousadia para
acreditar que poderiam existir outros tipos de modelos geométricos para a Natureza
que não a Geometria Euclidana.
Na metade do século XIX já tinham sido coletadas várias hipóteses assumidas por Euclides e utilizadas nas suas argumentações sem que tivessem tido uma
demonstração ou uma axiomatização anterior. Listemos algumas delas.
4. Hipóteses não mencionadas mas utilizadas por Euclides
α) Retas são conjuntos ilimitados;
β) Vale o postulado de Dedekind: as retas são contı́nuas;
γ) No axioma i) a reta que podemos traçar ligando
dois pontos é única;
δ) No axioma ii) pode-se continuar uma reta de
uma única maneira;
) Axioma de Pasch: sejam A, B e C três pontos não colineares e r uma reta que não contém nenhum destes
pontos. Se r corta o segmento AB então ela também
corta o segmento BC ou o segmento AC.
1.3. OS AXIOMAS DE HILBERT
9
Em 1898-99, o matemático alemão David Hilbert (1862 −
1943) apresentou um sistema de axiomas completo para a
Geometria Euclidiana plana e espacial numa série de conferências na Universidade de Göttingen. Isto significa que
todos os resultados dos Elementos permaneciam válidos assumindo seus postulados. Seu sistema axiomático é um
dos marcos na História da Matemática pois organiza os
fundamentos da Geometria e Análise. A comparação mais
próxima que pode ser feita é com a organização ocorrida
na Álgebra ao ser introduzido o conceito de grupo.
Apresentaremos a seguir um extrato dos axiomas para a chamada Geometria
Euclidiana plana, deixando seu detalhamento para a seção Leitura Complementar
no final do próximo capı́tulo. É conveniente que o leitor passe uma rápida leitura na lista completa dos axiomas para fixar e compreender melhor os termos que
utilizaremos abaixo como também é conveniente que tenha em mente os seguintes
fatos.
1. A possı́vel existência de um conjunto não vazio denotado por E2 , que não é
chamado de conjunto mas de plano, termo listado como indefinido no sistema
axiomático.
2. Elementos do plano, que não são chamados de elementos, mas de pontos,
portanto outro termo indefinido.
3. Subconjuntos de E2 chamados retas, termo indefinido. Quando nos referimos
a uma reta especı́fica denotaremos esta reta por E1 .
Observe que substituı́mos termos indefinidos por outros, tais como conjunto,
elemento, etc. As explicações acima são apenas para compreender o sistema, mas,
certamente, são redundâncias.
I. Termos indefinidos
1. Ponto, reta, plano, pertence, está entre, congruência.
II Axiomas de Incidência
i) Para quaisquer dois pontos existe uma única reta que contém
estes pontos.
ii) Existem pelo menos três pontos que não pertecem a uma mesma
reta.
III Axiomas de Ordem
i) São estabelecidos quatro axiomas que dizem respeito à ordenação dos pontos de uma reta.
IV Axiomas de Congruência
10
CAPÍTULO 1. HISTÓRIA
i) São estabelecidos cinco axiomas que dizem respeito à congruência de ângulos, segmentos e triângulos.
V Axioma das paralelas
i) Por um ponto fora de uma reta pode-se traçar uma única
reta paralela à reta dada.
VI Axiomas de Continuidade
i) Completude de uma reta.
ii) Propriedade Arquimediana de uma reta.
Vários outros sistemas axiomáticos equivalentes
ao de Hilbert foram propostos. Dois deles se destacam. Aquele estabelecido por George David
Birkhoff (1864 - 1944), com forte ênfase no conceito de distância, e um outro conhecido pela
sigla SMSG (School Mathematics Study Group)
feito na década de 1960 por uma equipe de professores americanos dirigidos por Edward G. Begle. Aqui, mais uma vez fatos polı́ticos interferem nos caminhos da Matemática.
Com o lançamento do primeiro satélite artificial pela extinta União Soviética, o
Governo Americano decidiu reformular o ensino de Ciências nas escolas, nomeando
e financiando grupos de estudos para elaborar as propostas da reforma. SMSG foi
um dos grupos.
Logo após a fixação dos axiomas de Hilbert, o matemático americano Oswald
Veblen (1880 − 1960) estabeleceu os axiomas da Geometria Projetiva na sua obra
Projective Geometry em conjunto com John Wesley Young. Atualmente, o inglês
H. M. S. Coxeter (1907 − ) é considerado o maior geômetra sintético, tendo vários
livros publicados na área.
Capı́tulo 2
Arquitetura do texto
Um dos nossos interesses ao apresentar o sistema
axiomático de Hilbert é deixar claro como estarão
organizados ao longo do livro os tópicos que estudaremos. Daremos a seguir uma visão rápida da
estrutura didática escolhida. Assumiremos que o
leitor está familiarizado com os principais resultados de Geometria Euclidiana, pois as outras Geometrias serão estudadas estabelecendo analogias
com ela.
2.1
Estrutura do livro
A primeira grande pergunta que surge é saber se
existe um conjunto que satisfaça os axiomas de Hilbert. O próprio sistema axiomático já apresenta a resposta positiva.
Primeiro. O conjunto dos números reais, R, pode ser considerado uma reta
Euclidiana modelo. Os grupos de axiomas de ordem, continuidade e congruência,
permitem estabelecer uma relação biunı́voca entre o conjunto dos números reais e
os pontos de qualquer reta E1 . Assumiremos a identificação pontos de uma reta e
números reais, como é apresentado aos estudantes do Ensino Médio, sem nenhuma
formalização ou rigor.
Segundo. O produto interno canônico no espaço Rn , n = 2, 3, é uma ferramenta
essencial, pois possibilita precisar vários termos indefinidos, como reta, congruência,
etc. bem como utilizar processos algébricos para verificar que aqueles conjuntos
satisfazem, de fato, os axiomas de Hilbert. O produto interno seria o equivalente
à régua e ao transferidor, simultaneamente. Como a linguagem escolhida para
a apresentação do texto foi a linguagem vetorial iniciamos com um capı́tulo de
12
CAPÍTULO 2. ARQUITETURA DO TEXTO
Álgebra Linear.
Com isto, surge a Geometria Analı́tica, que não é um ramo da Geometria como
o termo nos induz a pensar, mas um poderoso método para solucionar problemas.
Fixado um sistema de eixos cartesianos, podemos fazer uma identificação canônica
entre um plano Euclidiano E2 com o conjunto algébrico R2 e entre um espaço
Euclidiano E3 com o R3 . Tais identificações permitem transcrever vários problemas
geométricos para uma linguagem algébrica.
Além disto, é possı́vel construir e estudar modelos (superfı́cies bidimensionais)
para as outras principais Geometrias clássicas surgidas a partir do historicamente
controvertido Axioma das Paralelas.
Antecipemos que a idéia de continuidade estará sempre presente e será utilizado
sem formalização maior. Se denotamos por P2 um dos modelos, as retas r ⊂ P2
serão contı́nuas no seguinte sentido.
1. Tipo 1 As retas são como retas Euclidianas: existe uma correspondência
biunı́voca (e contı́nua) entre ela e os números reais.
2. Tipo 2 Ao retirarmos um dos seus pontos o restante é como reta Euclidiana.
Portanto, podemos imaginá-las como um cı́rculo usual.
As retas em cada modelo são do mesmo tipo.
2.2
Genealogia
Como ressaltamos, o sistema axiomático de Hilbert é organizado em cinco grupos:
1.
2.
3.
4.
5.
incidência;
ordem;
congruência;
paralelismo;
continuidade.
As superfı́cies que estudaremos são criadas a partir desta divisão axiomática. Postulase grupos de axiomas, algumas vezes com pequenas modificações dos Axiomas de
Hilbert, para criar um modelo para a Geometria estabelecida.
A Geometra Projetiva é certamente a mais simples, com dois grupos axiomáticos,
o de incidência e o de continuidade.
Na Geometria Elı́ptica são considerados todos os grupos, exceto o de ordem;
nega-se a existência do paralelismo e não é exigido a unicidade de interseção de
retas.
2.3. ISOMETRIA E CONGRUÊNCIA
13
Na Geometria Afim, eliminamos apenas o grupo de congruência do sistema
axiomático de Hilbert, o restante pemanece igual ao da Geometria Euclidiana.
A Geometria Hiperbólica, que não estudaremos aqui, tem todos os axiomas iguais
ao da Geometria Euclidiana, exceto o postulado das paralales onde não é exigida a
unicidade.
Um esquema hereditário da Geometria mais simples para a mais complexa em
termos axiomáticos fica resumido nesta árvore genealógica.
Elı́ptica
Parabólica
Projetiva
Afim
.
(ou Euclidiana)
Hiperbólica
Isto provoca uma diferença substancial entre elas sob vários aspectos, inclusive sobre
as propriedades do polı́gono mais simples, o triângulo. Um resumo das diferenças,
levando em conta o postulado das paralelas, pode ser feito da seguinte forma.
a) Geometria Parabólica (ou Euclidiana): por um ponto fora de uma reta passa
apenas uma reta paralela a ela. O modelo considerado será o R2 , ponto de
referência em torno do qual o texto se desenvolve. Como sabemos, nesta
Gemetria a soma das medidas dos ângulos internos de um triângulo é igual a
π.
b) Geometria Elı́ptica: por um ponto fora de uma reta não passam retas paralelas
a ela. Estudaremos como modelo a esfera unitária S2 . Neste caso, a soma das
medidas dos ângulos internos de um triângulo é maior que π.
c) Geometria Hiperbólica (Não Euclidiana1 ) por um ponto fora de uma reta
passa mais de uma reta paralela a ela. Usualmente o modelo considerado é
o disco unitário do plano Euclidiano, chamado de disco de Poincaré. Aqui, a
soma das medidas dos ângulos internos de um triângulo é menor que π.
2.3
Isometria e Congruência
As retas contidas nas superfı́cies que examinaremos neste texto podem ser estabelecidas a partir de uma função distância que, por sua vez, é uma função distância
induzida do produto interno canônico do R3 . Em última instância, as retas são
1
Geometria Não Euclidiana: é um termo introduzido por Gauss.
14
CAPÍTULO 2. ARQUITETURA DO TEXTO
as geodésicas definidas e estudadas mais amplamente na Geometria Diferencial,
embora este fato não seja explorado.
Na Geometria sintética, em geral, não é considerado o conceito de distância no
sistema axiomático. Nos modelos, a métrica está ressaltada para realizar a idéia de
congruência, que é muito próxima ao conceito de distância: dois segmentos de reta
(ou dois ângulos) são congruêntes se existe uma isometria que aplica um segmento
no outro (ou um ângulo no outro). Veremos que todo o esforço para classificar
isometrias fica restrito ao caso Euclidiano.
O conjunto das isometrias de uma superfı́cie forma um
grupo quando está equipado com a operação de composição de funções. Ao definir uma distância na superfı́cie, nos aproximamos de abordagens mais recentes
para o estudo de geometrias, seguindo a idéia do matemático prussiano Felix Christian Klein (1849 − 1925),
que descrevia a Geometria como o estudo das propriedades de uma figura que permaneciam invariantes sob a
ação de um particular grupo de transformações, no nosso
caso, as isometrias.
A obsessão de Klein em fazer a análise sob o ponto de vista funcional permeou
essa idéia por praticamente toda teoria que surgiu na Matemática ao longo do século
XX. Ele foi o introdutor do termo Geometria Elı́ptica.
2.4
Leitura complementar
1. Axiomas da Geometria Euclidiana plana proposto por Hilbert [W-W].
I Termos indefinidos
1. Ponto, reta, plano, pertence, está entre e congruência.
II Axiomas de incidência
1. Para cada dois pontos distintos existe uma (única) reta
que os contém.
2. Toda reta contém pelo menos dois pontos.
3. Existem pelo menos três pontos que não estão sobre uma
mesma reta e todos os pontos estão sobre o mesmo plano.
III Axiomas de Ordem.
1. Se um ponto B está entre A e C, então os três pontos
pertencem a uma mesma reta e B está entre C e A.
2.4. LEITURA COMPLEMENTAR
15
2. Para quaisquer dois pontos distintos A e C, existe pelo
menos um ponto B pertencente à reta AC tal que B está
entre A e C.
3. Se três pontos distintos estão sobre uma mesma reta, não
mais que um ponto está entre os outros dois.
4. (Pasch) Sejam A, B e C três pontos que não estão sobre
uma mesma reta e seja l uma reta do plano que não contém
algum dos três pontos. Então, se l intercepta o segmento
AB, ela também intercepta o segmento AC ou o segmento
BC.
IV Axiomas de Congruência
1. Se A e B são dois pontos numa reta l e A é um outro ponto
de uma reta l , não necessariamente distinta da anterior,
então é sempre possı́vel encontrar um ponto B em (um
dado lado da reta) l tais que os segmentos AB e A B são
congruentes ().
2. Se um segmento A B e um segmento A B são congruentes
a um mesmo segmento AB então os segmentos A B e A B são congruentes entre si.
3. Sobre uma reta l, sejam AB e BC dois segmentos da mesma
que, exceto por B não têm pontos em comum. Além disto,
sobre uma outra ou a mesma reta l , sejam A B e B C dois
segmentos que, exceto por B não têm pontos em comum.
Neste caso, se AB A B e BC B C , então AC A C .
−−→
4. Se ∠ABC é um ângulo e se B C é um raio, então existe
−−→
exatamente um raio A B em cada lado de B C tal que
∠A B A ∠ABC. Além disto, cada ângulo é congruente
a si mesmo.
5. Se para dois triângulos ∆ABC e ∆A B C as congruências
AB A B , AC A C e ∠BAC ∠B A C são válidas, então
a congruência ∠ABC ∠A B C é satisfeita.
V Axioma das Paralelas
1. Seja l uma reta e A um ponto não em l. Então existe no
máximo uma reta no plano que passa por A e não intercepta l.
VI Axiomas de Continuidade
1. Axioma de Arquimedes: Se AB e CD são segmentos, então
existe um número natural n tal que n cópias de CD con-
16
CAPÍTULO 2. ARQUITETURA DO TEXTO
−−
→
truı́das contiguamente de A ao longo do raio AB passará
além do ponto B.
2. Axioma da Completude da Reta: Uma extensão de um conjunto de pontos sobre uma reta com suas relações de
congruência e ordem que poderiam preservar as relações
existentes entre os elementos originais, bem como as propriedades fundamentais de congruência e ordem que seguem dos axiomas acima (menos o das Paralelas), é impossı́vel.
2. Axiomas da Geometria Euclidiana Espacial Devemos acrescentar uns
poucos axiomas aos axiomas da Geometria plana, a maioria deles sobre existência e incidência. Não separaremos por grupos. A Geometria Euclidiana Espacial algumas vezes também é chamada de Geometria Euclidiana Sólida.
VII Axiomas sobre planos
1. Em todo plano existe ao menos três pontos não colineares.
2. Nem todos os pontos pertencem ao mesmo plano.
3. Três pontos não colineares pertencem a um único plano.
4. Se dois pontos de uma reta pertencem a um plano, então
toda a reta está contida no plano.
5. Se dois planos têm um ponto em comum eles têm um segundo ponto em comum.
3. Aristóteles descendia de uma abastada famı́lia da Macedônia. Seu pai fôra
médico do avô de Alexandre, o grande. Estudou na Academia de Platão e
ali ficou até a morte do fundador (± 347 aC), quando emigrou para a Ásia
Menor, indo desposar Pı́tia, a filha de um pequeno tirano da região. Com
a invasão e conquista da região pelos persas, emigrou para a ilha de Lesbos
onde sua esposa morreu ao dar a luz a uma filha.
2.4. LEITURA COMPLEMENTAR
17
Em 343 aC, Felipe, pai de Alexandre, chamou-o para educar o filho, fato que
criou uma grande afeição entre o filósofo e o futuro conquistador. Após ser
(um excelente) governador de uma região da Macedônia, voltou à Atenas onde
fundou o famoso Liceu.
O Liceu foi a primeira Universidade, com o significado atual do termo. Ao
contrário da Academia, instituição destinada aos aristocratas, Aristóteles requisitava seus alunos na classe média. E a diferença continuava no método
de ensino. Seus alunos eram dirigidos para o estudo de Ciências onde classificavam plantas, animais e seus hábitos, estudavam Epistemologia, Filosofia,
Anatomia, etc. O Liceu tinha biblioteca, jardim zoológico e museu natural,
mantidos com a ajuda financeira de Alexandre e exemplares trazidos pelos
pescadores, exploradores e caçadores, a seu pedido.
Aritósteles foi cientista, professor e filósofo. Suas aulas matutinas eram ministradas caminhando com seus alunos pelos pórticos que circundavam o Liceu,
escola contruı́da no meio dos Jardins de Lı́cio. É por isso que sua escola é apelidada de peripatética (ambulante). Pelas tardes abria-se a Universidade para
a população onde eram proferidas conferências sobre diversos assuntos. Embora√não fosse matemático, deixou registrado uma demonstração mostrando
que 2 não era comensurável. Seu rigor cientı́fico, levou-o a uma filosofia na
qual os termos empregados eram precisamante definidos. Eudoxo inspirou-se
em Aristóteles para introduzir na Matemática o sistema axiomático.
Prestes a morrer, pediu para ser sepultado ao lado da esposa, na ilha de Lesbos
[Mon].
Parte II
ÁLGEBRA LINEAR
Capı́tulo 3
O espaço vetorial Rn
Neste capı́tulo,
estudaremos os conjuntos
2
3
algébricos R e R . Ressaltamos que discorreremos sobre dois tipos de objetos, um deles
algébrico, o Rn , enquanto o outro é Euclidiano.
O terceiro objeto, a figura, serve apenas para
organizar as idéias. Usaremos os termos função e
aplicação com o mesmo significado. Esta parte do
texto é um extrato de [An2].
3.1
O conjunto Rn
Denotamos por Rn o conjunto das n-uplas ordenadas de números reais, ou seja,
Rn = {(v1 , v2 , ..., vn ); vi ∈ R para todo inteiro i, 1 ≤ i ≤ n}.
Os elementos deste conjunto são chamados de pontos e, por simplicidade, muitas
vezes indicaremos um ponto de Rn como v = (v1 , v2 , ..., vn ). Num primeiro momento, estes são os conjuntos para os quais voltaremos nosso interesse. Observe
que v = (v1 , v2 , ..., vn ) e w = (w1 , w2 , ..., wn ) são iguais, v = w, se, e somente
se, vi = wi para todo i = 1, 2, ..., n. Para organizar a escrita utilizaremos letras
minúsculas para indicar os pontos de Rn . Por exemplo,
a = (a1 , a2 , ..., an ),
p = (p1 , p2 , ..., pn ),
w = (w1 , w2 , ..., wn ),
etc.
A maior parte do texto está relacionada com os conjunto R2 e R3 , e por isto reservaremos uma notação especial para indicar seus elementos. Para o primeiro conjunto
indicaremos um par ordenado por v = (x, y) e uma tripla ordenada em R3 será
registrada na forma v = (x, y, z).
As idéias expressas pelos termos ponto, reta, plano e espaço empregadas na Geometria Euclidiana são auto-explicáveis, não suportam uma definição. Denotaremos
20
CAPÍTULO 3. O ESPAÇO VETORIAL RN
uma reta, um plano e um espaço Euclidianos por E1 , E2 e E3 , respectivamente. A
relação entre os conjuntos algébricos R1 , R2 e R3 com aqueles é do conhecimento
de todos, mas recapitulemos a construção que justifica a existência da Geometria
Analı́tica. Observamos que devemos distinguir o conjunto algébrico, o conjunto
Euclidiano e as figuras feitas no papel.
O conjunto das 1-upla ordenadas, R1 = {(x); x ∈ R}, é canonicamente identificado com o conjunto dos números reais R. Não distinguiremos uma 1-upla ordenada
(x) ∈ R1 de um número real x ∈ R. Para construir uma correspondência um a um
entre os números reais R e os pontos de uma reta Euclidiana E1 , fixamos uma unidade e associamos a cada ponto de uma reta Euclidiana E1 um único número real,
o qual é chamado de abscissa do ponto. Com
isto, temos definido uma aplicação P : R →
E1 , onde P (x) é o ponto da reta Euclidiana
cuja abscissa é x.
Seja (x, y) ∈ R2 . Escolhidos dois eixos Cartesianos num plano Euclidiano E2 ,
digamos ox e oy, definimos P : R2 → E2 , onde P (x, y) é o ponto do plano Euclidiano
cuja abscissa é x e a ordenada é y. Reciprocamente, cada ponto no plano é associado
a um único par ordenado. Fixado o sistema de eixos, o plano Euclidiano passa a
ser chamado de plano Cartesiano.
Da mesma forma, seja v = (x, y, z) ∈ R3 . Fixados três eixos Cartesianos em E3 ,
ox, oy e oz, definimos a aplicação P : R3 → E3 , onde P (x, y, z) é o ponto do espaço
Euclidiano tal que a abscissa é x, a ordenada é y e a altura é z. Certamente o leitor
está acostumado com a notação P (x, y, z). Quando fixamos um sistema de eixos
em E3 passamos a chamá-lo de espaço Cartesiano.
Indicamos pontos de En , n = 1, 2, 3, por letras maiúsculas. Por exemplo, U ∈ E2
significa um ponto do plano Euclidiano. Ao escrevermos U (2, 3) estamos supondo
que já fixamos os eixos Cartesianos e o ponto é imagem de u = (2, 3) ∈ R2 , pela
aplicação P : R2 → E2 . Esta será uma regra notacional. O ponto v = (v1 , v2 ) terá
3.2. O ESPAÇO VETORIAL RN
21
sua imagem pela aplicação P indicada por V (v1 , v2 ) em lugar de P (v1 , v2 ), o ponto
w = (w1 , w2 ) terá sua imagem indicada por W (w1 , w2 ), etc. Uma regra notacional
similar será utilizada para R3 .
Comentário Neste texto, não estudaremos Geometria Analı́tica, mas lançaremos mão de uns poucos resultados desta disciplina que são do conhecimento de todos desde o Ensino Médio. No desenvolvimento da teoria nos depararemos com vários
subconjuntos Γ ⊂ R2 definidos por uma equação
linear homogênea, por exemplo, Γ = {(x, y) ∈
R2 ; x − 3y = 0}.
Um tal conjunto tem como imagem pela aplicação P : R2 → E2 uma reta que
contém a origem do plano Cartesiano cuja equação linear homogênea que a define é a
mesma, {P (x, y) ∈ E2 ; x− 3y = 0}. A identificação é tão natural que continuaremos
a designar pela mesma letra a imagem, Γ = {P (x, y) ∈ E2 ; x − 3y = 0}, embora os
dois sejam subconjuntos de conjuntos diferentes.
Do mesmo modo, os subconjuntos do R3 definidos
por uma equação linear homogênea, por exemplo,
Γ = {(x, y, z) ∈ R3 ; x + y + z = 0}, têm como
imagem pela aplicação P : R3 → E3 um conjunto
definido pela mesma equação linear homogênea,
{P (x, y, z) ∈ E3 ; x + y + z = 0}. Como sabemos,
este último conjunto é um plano que contém a origem do espaço Cartesiano. Também a imagem de
Γ será indicada pela mesma letra.
2
3.2
O espaço vetorial Rn
Em Rn definimos duas operações binárias, a soma de dois elementos e a multiplicação de um elemento por um escalar. Aqui, o termo escalar significa número
real. As operações são definidas dos seguintes modos. Se v = (v1 , v2 , ..., vn ), w =
(w1 , w2 , ..., wn ) ∈ Rn e λ ∈ R estabelecemos que
v + w = (v1 + w1 , v2 + w2 , ..., vn + wn ),
λv = (λv1 , λv2 , ..., λvn ).
Diz-se que as operações equipam Rn com uma estrutura de espaço vetorial e os
elementos de Rn passam a ser chamados de vetores. Na seção Leitura Complementar
deste capı́tulo é apresentada a definição de espaço vetorial. O espaço Rn possui todas
as propriedades ali enumeradas.
22
CAPÍTULO 3. O ESPAÇO VETORIAL RN
Utilizamos uma terminologia própria quando estamos falando acerca do espaço
vetorial Rn . Por exemplo, escalar significa um número real, como já foi dito. O
vetor nulo é o vetor o = (0, 0, ..., 0). Dois vetores v, w ∈ Rn são colineares quando
existe um escalar λ ∈ R tal que v = λw ou w = λv.
Anteriormente, exibimos uma identificação entre os conjuntos Rn com os conjuntos Euclidianos, En , para n = 1, 2, 3. Depois, definimos uma operação de soma
de dois elementos e um produto de um elemento por um escalar em Rn , passando
a chamá-los de espaço vetorial. Novamente, iremos interpretar geometricamente
os vetores para explicitar a existência da estrutura algébrica em Rn . A diferença
entre o conjunto e o conjunto com a estrutura algébrica (espaço vetorial) é sutil mas
existe, e a diferença é visualizada utilizando-se segmento orientado.
Sejam R, S ∈ En . Um segmento orientado em En é o
par ordenado (R, S) que por conveniências gráficas é
−→
indicado por RS, em lugar da notação clássica para
pares ordenados. Esta grafia registra a idéia de uma
seta com ponto inicial em R e ponto final em S. O
conjunto de todos os segmentos orientados de En in→
−
dicamos sugestivamente por E n .
Sejam R(r1 , r2 , ..., rn ) e S(s1 , s2 , ..., sn ) pontos de En .
−→
Diz-se que o segmento orientado RS representa o vetor v = (v1 , v2 , ..., vn ) ∈ Rn se, e somente se, as coordenadas dos pontos e as coordenadas do vetor estão
relacionadas pelas equações como descrito ao lado
v1 =
v2 =
...
vn =
s1 − r1
s2 − r2
.
sn − rn
Exemplo 3.2.1 Um vetor pode ser representado por vários segmentos orientados
diferentes. Vejamos duas representações para v = (1, 2) ∈ R2 . Se escolhermos os
−→
pontos R(2, 0) e S(3, 2) em E2 , o segmento orientado RS representa v pois
1= 3−2
.
2= 2−0
−−→
Se escolhermos os pontos U (1, 1) e V (2, 3) o segmento orientado U V também representa o mesmo vetor v pois
1= 2−1
2
.
2= 3−1
O segmento orientado canônico para representar o vetor v = (v1 , v2 , ..., vn ) é
aquele que tem como ponto inicial a origem O e ponto final V (v1 , v2 , ..., vn ). Numa
linguagem informal, dizemos que obtido um representante do vetor com ponto inicial
3.2. O ESPAÇO VETORIAL RN
23
a origem O, qualquer outro representante é obtido por transporte paralelo daquele.
Feitas estas considerações passemos às contruções.
→
−
a) A representação geométrica dos reais R é feita definindo-se a aplicação P :
→
−
→
−
−−→
R → E 1 , onde P (x) é o segmento orientado OP cujo ponto inicial é a origem
O e o ponto final é o ponto da reta Euclidiana cuja abscissa é P (x) = x.
b) Da mesma forma, definimos uma representação do espaço vetorial R2 estabe→
−
→
−
→
−
lecendo que a aplicação P : R2 → E 2 tem como regra: P (x, y) é o segmento
−−→
orientado OP cujo ponto inicial é a origem e o ponto final é P (x, y).
c) Similarmente, fazemos a representação de um vetor do espaço vetorial R3 ,
agora utilizando o espaço Cartesiano E3 .
Comentário Dentre as muitas utilidades do determinante, existe uma interpretação geométrica que será utilizada ao longo do texto, embora não seja demonstrada
aqui. Aos vetores u = (u1 , u2 ) e v = (v1 , v2 ) em R2 , associamos um parelogramo
num plano Cartesiano, OU V P , cujos vértices são O(0, 0), U (u1 , u2 ), V (v1 , v2 ) e
−−→ −−→
P (u1 + v1 , u2 + v2 ). Observe que os segmentos orientados OU e V P são dois repre−−→ −−→
sentantes do vetor u e os segmentos orientados OV e U P são dois representantes
do vetor v. O valor absoluto do determinante da matriz cujas colunas são as coordenadas dos vetores, | det[u, v]|, é o valor da área do paralelogramo. Quando o
determinante é nulo, significa que o paralelogramo é degenerado, não tem o comprimento ou não tem altura. A diagonal do paralelogramo representa o vetor soma
u + v.
24
CAPÍTULO 3. O ESPAÇO VETORIAL RN
Da mesma forma, podemos interpretar o valor absoluto do determinante de uma
matriz 3 × 3 construı́da com três vetores do R3 , u = (u1 , u2 , u3 ), v = (v1 , v2 , v3 ) e
w = (w1 , w2 , w3 ), ou seja, o valor absoluto do determinante da matriz
u1 v1 w1
[u, v, w] = u2 v2 w2 ,
u3 v3 w3
como sendo o volume de um paralelepı́pedo no espaço Cartesiano, construı́do de tal
forma que suas arestas são obtidas pelo transporte paralelo dos segmentos orientados
representando os três vetores. A diagonal do paralelepı́pedo representa a soma dos
três vetores, u + v + w.
3.3
Subespaço vetorial
Dentre todos os subconjuntos de Rn alguns são especiais, não apenas para a compreensão do texto, mas para a Álgebra Linear como um todo. São os chamados
subespaços vetoriais.
Definição 3.3.1 Diz-se que um subconjunto Γ ⊂ Rn é um subespaço vetorial
quando possuir as seguintes propriedades:
1. Γ é um conjunto não vazio;
2. se v, w ∈ Γ então v + w ∈ Γ;
(fechado em relação à soma de vetores)
3. se v ∈ Γ e λ ∈ R então λv ∈ Γ. (fechado em relação ao produto por escalar)
Por simplicidade, diremos que Γ é um subespaço. O termo subespaço vetorial
está bem empregado, uma vez que o leitor pode verificar que Γ satisfaz todas as
condições listadas na definição de espaço vetorial, ficando o préfixo sub por conta de
Γ ser um subconjunto de Rn . Naquela definição é exigido que o conjunto tenha um
elemento neutro em relação à soma de vetores. De fato, um subespaço Γ contém o
vetor nulo. Senão vejamos. Como Γ é não vazio, escolhemos um vetor qualquer v ∈ Γ
e o escalar λ = 0. Pelo item 3, podemos garantir que o produto λv = (0, 0, ..., 0) ∈ Γ.
3.3. SUBESPAÇO VETORIAL
25
Destacamos dois exemplos de subespaços de Rn , a saber, o subespaço trivial
constituı́do apenas pelo vetor nulo, Γ = {(0, 0, ..., 0)}, e aquele formado por todos
os vetores, Γ = Rn . É claro, que estaremos também interessados em estudar os
subespaços próprios, aqueles que satisfazem a condição
{(0, 0, ..., 0)} Γ Rn .
Empregaremos duas técnicas para descrever um subespaço. A primeira lançando
mão de equações lineares homogêneas.
Exemplo 3.3.1 Dado o subconjunto Γ = {(x, y, z) ∈ R3 ; x − 2y + 3z = 0} ⊂ R3 .
Verifica-se que Γ é um subespaço do R3 mostrando que ele possui as três propriedades enumeradas na definição de subespaço. Como a sentença que define o
conjunto Γ é a equação linear homogênea com três incógnitas x − 2y + 3z = 0, o
conjunto correspondente no espaço Cartesiano é um plano contendo a origem. 2
Para apresentar uma segunda maneira de descrever um subespaço é conveniente
fixar uma terminologia que será empregada inúmeras vezes.
Definição 3.3.2 Diremos que um vetor w ∈ Rn é uma combinação linear dos vetores v1 , v2 , ..., vk ∈ Rn se existem escalares a1 , a2 , ..., ak ∈ R, chamados coeficientes
da combinação linear, tais que w = a1 v1 + a2 v2 + · · · + ak vk .
O conjunto formado por todos os vetores que são combinações lineares dos vetores v1 , v2 , ..., vk ∈ Rn será indicado por [[v1 , v2 , ..., vk ]] ⊂ Rn . Mais precisamente,
[[v1 , v2 , ..., vk ]] = {w ∈ Rn ; w = a1 v1 + a2 v2 + · · · + ak vk , ai ∈ R}.
Relacionemos os dois tipos acima de apresentações de subespaços.
Exemplo 3.3.2 Consideremos um subespaço definido por uma equação linear homogênea, digamos Γ = {(x, y, z) ∈ R3 ; x − y + 3z = 0}.
Façamos uma manipulação algébrica. Um vetor v = (x, y, z) pertence a Γ se, e somente se,
v = (y − 3z, y, z). As igualdades
v = (y − 3z, y, z)
= (y, y, 0) + (−3z, 0, z)
= y(1, 1, 0) + z(−3, 0, 1),
nos dizem que v é uma combinação linear de
CAPÍTULO 3. O ESPAÇO VETORIAL RN
26
v1 = (1, 1, 0) e v2 = (−3, 0, 1). Isto mostra a inclusão Γ ⊂ [[v1 , v2 ]]. Reciprocamente.
Seja v = (x, y, z) ∈ [[v1 , v2 ]]. Então
(x, y, z)
=
=
=
=
v
a1 v1 + a2 v2
a1 (1, 1, 0) + a2 (−3, 0, 1)
(a1 − 3a2 , a1 , a2 ).
É imediato concluir que v = (x, y, z) satisfaz a equação linear homogênea x = y −3z,
pois y = a1 , z = a2 e x = 2a1 −3a2 , Portanto, qualquer vetor v = (x, y, z) ∈ [[v1 , v2 ]]
também pertence à Γ. Isto mostra a inclusão [[v1 , v2 ]] ⊂ Γ.
Observe que v1 ∈ [[v1 , v2 ]] = Γ pois ele é a combinação linear v1 = 1v1 + 0v2 .
2
Da mesma forma mostramos que v2 ∈ [[v1 , v2 ]] = Γ.
Comentário Quando consideramos um único vetor, v1 ∈ Rn , ao dizermos que
w ∈ Rn é uma combinação linear de v1 estamos apenas afirmando que w é um
2
múltiplo de v1 , em outras palavras, w = a1 v1 .
Proposição 3.3.1 Sejam v1 , v2 , ..., vk ∈ Rn . O conjunto das combinações lineares
destes vetores,
[[v1 , v2 , ..., vk ]] = {w ∈ Rn ; w = a1 v1 + a2 v2 + · · · + ak vk , ai ∈ R},
é um subespaço vetorial de Rn .
A proposição ensina um pouco mais. É fácil construir subespaços vetoriais,
basta escolher uma coleção não vazia de vetores, v1 , v2 , ..., vk ∈ Rn , e considerar o
conjunto de todas as suas combinações lineares, [[v1 , v2 , ..., vk ]].
Como sempre, fixado um conceito surgem as perguntas. Dado um subespaço
Γ ⊂ Rn .
1. Existem vetores v1 , v2 , ..., vk ∈ Rn tais que Γ = [[v1 , v2 , ..., vk ]]?
2. Se existem, qual o número mı́nimo de vetores que podemos utilizar para
descrevê-lo como subespaço de combinações lineares Γ = [[w1 , w2 , ..., wl ]]?
A resposta para a primeira pergunta é sim e o número mı́nimo de vetores que
podemos utilizar chama-se de dimensão de Γ. Em português, dependendo do contexto, a palavra dimensão transmite a noção de comprimento, largura e altura.
Fisicamente, dizemos que um segmento de reta tem comprimento, uma figura plana
como um retângulo tem comprimento e largura e um sólido como um paralelepı́pedo
tem comprimento, largura e altura. A noção de dimensão de um subespaço transfere
estas noções fı́sicas para a Matemática, mas para transferı́-la precisamos de terminologias apropriadas. Este é o objetivo das próximas seções, definir e determinar a
3.4. INDEPENDÊNCIA LINEAR
27
dimensão de um subespaço, no sentido Matemático do termo. Antes de avançarmos,
resumiremos o conteúdo desta seção com um conceito.
Diz-se que um subconjunto ordenado β = {v1 , v2 , ..., vk } ⊂ Rn é um conjunto
ordenado de geradores do subespaço Γ ⊂ Rn quando β ⊂ Γ e Γ = [[v1 , v2 , ..., vk ]].
A segunda condição pode ser dita de outra forma: dado qualquer vetor w ∈ Γ
existem escalares a1 , a2 , ..., ak ∈ R tais que w = a1 v1 + a2 v2 + · · · + ak vk .
A expressão ”subconjunto ordenado” significa que existe um primeiro elemento,
e ele está indexado por 1, um segundo elemento que está indexado por 2, etc.
Eventualmente, dois elementos podem ser iguais.
Deste ponto em diante, a menos que seja dito explicitamente o contrário, passamos a supor que os subespaços considerados Γ ⊂ Rn não são o subespaço trivial
e os conjuntos ordenados β = {v1 , v2 , ..., vk } são formados por vetores não nulos.
Exercı́cios propostos 3.1
1. Existem várias outras técnicas para construir subespaços vetoriais. Por exemplo,
mostre que se Γ1 e Γ2 são dois subespaços vetoriais de Rn , então a interseção Γ1 ∩ Γ2
também o é.
2. Seja β = {v1 , v2 , ..., vk−1 , vk } um conjunto ordenado de Rn .
1. É verdade que vi ∈ [[v1 , v2 , ..., vk ]]?
2. Mostre que [[v1 , v2 , ..., vk−1 ]] ⊂ [[v1 , v2 , ..., vk−1 , vk ]].
3. Pode ocorrer a igualdade [[v1 , v2 , ..., vk−1 ]] = [[v1 , v2 , ..., vk−1 , vk ]]?
3.4
Independência linear
Anteriormente, utilizamos o conceito de combinação linear para dar significado aos
termos ”conjunto ordenado de geradores de um subespaço vetorial Γ”. O próximo
passo é classificar os conjuntos ordenados de geradores em dois tipos:
1. aqueles conjuntos com os quais expressamos cada vetor do espaço de maneira
única, tecnicamente falando, os linearmente independentes,
2. e aqueles que não possuem esta propriedade, os linearmente dependentes.
Combinando os dois conceitos, geradores e independência linear, definimos base
ordenada de um subespaço,
Conjunto ordenado de geradores
e
Base ordenada
.
Conjunto linearmente independente
28
CAPÍTULO 3. O ESPAÇO VETORIAL RN
Diremos que um conjunto ordenado β = {v1 , v2 , ..., vk } ⊂ Rn é linearmente independente se a única combinação linear possı́vel com os vetores de β para expressar o
vetor nulo é a combinação linear cujos coeficientes são todos iguais ao escalar zero.
Formalizemos estes comentários numa definição.
Definição 3.4.1 Um conjunto ordenado β = {v1 , v2 , ..., vk } ⊂ Rn é linearmente
independente se, e somente se, (0, 0, ..., 0) = a1 v1 + a2 v2 + · · · + ak vk então a1 =
a2 = · · · = ak = 0.
Chamamos a atenção para dois pontos.
1) Quando o conjunto ordenado é constituı́do de um único vetor não nulo, β =
{v1 }, ele é linearmente independente.
ii) Quando existe uma combinação linear para o vetor nulo com coeficientes não
todos nulos, diremos que o conjunto ordenado β é linearmente dependente.
Uma das facilidades da Álgebra Linear é que muitas propriedades gerais são
conhecidas examinando apenas se o vetor nulo possui aquela propriedade. Este é o
caso da combinação linear. Se soubermos que o vetor nulo é escrito de modo único
como uma combinação linear, garantiremos que o mesmo ocorrerá com todos os
outros vetores, e reciprocamente.
Existe uma cota superior para o número de vetores de um conjunto ordenado
linearmente independente em Rn .
Proposição 3.4.1 Seja β = {v1 , v2 , ..., vk } ⊂ Rn um conjunto ordenado de vetores.
Se k > n então β é linearmente dependente.
Um conjunto de geradores linearmente dependente de um subespaço pode ser
simplificado, eleminando-se um determinado vetor e continuando com um conjunto
de geradores.
Proposição 3.4.2 Suponha que β = {v1 , ..., vi , ..., vk } é um conjunto ordenado de
vetores não nulos de Rn . As seguintes afirmações são equivalentes:
a) O conjunto β é linearmente dependente;
b) Existe um vetor vi que é uma combinação linear dos vetores v1 , v2 , ..., vi−1 ;
c) [[v1 , ..., v
i , ..., vk ]] = [[v1 , ..., vi , ..., vk ]] (o sinal v
i indica que o vetor vi foi suprimido da lista).
3.5. BASE E DIMENSÃO
29
O procedimento indicado na proposição pode ser aplicado reiteradamente. Ao
simplificar o conjunto ordenado de geradores β = {v1 , ..., vi , ..., vk } retirando do conjunto o primeiro elemento vi que seja combinação linear dos anteriores, concluı́mos
que o subespaço das combinações lineares de β
i = {v1 , ..., v
i , ..., vk } é o mesmo,
[[v1 , ..., v
i , ..., vk ]] = [[v1 , ..., vi , ..., vk ]].
Ao conjunto ordenado de geradores β
i , aplicamos o mesmo processo, retiramos o
primeiro elemento vj que seja combinação lineares dos anteriores, é claro que j > i,
obtendo β
ij = {v1 , ..., v
i , ..., v
j , ...vk } e a igualdade dos subespaços das combinações
lineares
vj , ..., vk ]] = [[v1 , ..., v
i , ..., vk ]] = [[v1 , ..., vi , ..., vk ]]
[[v1 , ..., v
i , ...
No final do processo temos construı́do um conjunto ordenado de geradores, digamos
α, contendo pelo menos o vetor v1 e gerando o mesmo subespaço original. No
conjunto α, um vetor qualquer não é combinação linear de seus antecessores. Com
uma releitura da última proposição na forma contrapositiva, concluı́mos que α é
um conjunto linearmente independente.
3.5
Base e dimensão
Na seção anterior consideramos um subespaço [[v1 , v2 , ..., vk ]] e simplificamos o conjunto de geradores suprimindo alguns de seus vetores até obter um conjunto de
geradores linearmente independente para o subespaço. Tendo em vista aqueles comentários fixaremos a seguinte terminologia e um corolário cuja demonstração é
imediata.
Definição 3.5.1 Seja Γ um subespaço vetorial não trivial de Rn . Uma base ordenada para Γ é um conjunto ordenado de geradores α ⊂ Γ linearmente independente.
Corolário 3.5.1 Dado o subespaço [[v1 , v2 , ..., vk ]] ⊂ Rn , podemos escolher um subconjunto α ⊂ {v1 , v2 , ..., vk } que é uma base ordenada do subespaço.
A base canônica do Rn é o subconjunto ordenado de n vetores C = {e1 , e2 , ..., en }
de Rn , onde
e1 = (1, 0, ..., 0),
e2 = (0, 1, ..., 0),
...
en = (0, 0, ..., 1).
Dado um subespaço Γ ⊂ Rn , podemos escolher, sucessivamente, vetores v1 ,
v2 ,...,vk em Γ, linearmente independentes, até obter uma base ordenada e concluir
que Γ = [[v1 , v2 , ..., vk ]]. Todo subespaço não trivial do Rn possui uma base, aliás,
podemos construir muitas bases para o subespaço.
30
CAPÍTULO 3. O ESPAÇO VETORIAL RN
Teorema 3.5.1 Seja Γ ⊂ Rn um subespaço não trivial. Então existe uma base
ordenada α = {v1 , v2 , ..., vk } ⊂ Γ. Além de Γ = [[v1 , v2 , ..., vk ]] podemos afirmar:
a) o número de elementos de α é menor ou igual a n;
b) se o número de elementos de α é igual a n então Γ = Rn ;
c) todas bases ordenadas de Γ têm o mesmo número de elementos.
O teorema acima permite a seguinte definição.
Definição 3.5.2 A dimensão de um subespaço não trivial Γ ⊂ Rn é o número de
elementos de uma de suas bases. A dimensão do espaço trivial é zero.
Pela definição a dimensão de Rn é n. Com as técnicas utilizadas acima podemos
demonstrar que qualquer conjunto linearmente independente pode ser estendido a
uma base.
Corolário 3.5.2 Seja γ = {v1 , v2 , ..., vk } uma base ordenada de um subespaço
próprio Γ Rn . Então existe uma extensão α = {v1 , v2 , ..., vk , ..., vn }, que é uma
base ordenada de Rn .
Comentário Vale um comentário sobre as dimensões possı́veis para os subespaços
não triviais do R2 . Como todo subespaço Γ ⊂ R2 possui uma base ordenada β
podemos escrevê-lo como o subespaço das combinações lineares dos vetores de β.
Mas sabemos que mais de dois vetores em R2 são linearmente dependentes, portanto,
sendo o conjunto linearmente independente, β tem um ou dois vetores. Quando
β = {v1 } diz-se que Γ = [[v1 ]] tem dimensão um. Sua representação no plano
Cartesiano é uma reta que contém a origem. Caso β = {v1 , v2 }, pelo visto no
último teorema, podemos afirmar que Γ = R2 . Recordamos que a base canônica de
R2 tem dois elementos, logo sua dimensão é dois.
Quanto ao estudo das dimensões possı́veis para os subespaços não triviais Γ ⊂ R3
os comentários são semelhantes. Se β é uma base ordenada de Γ podemos escrevêlo como o subespaço das combinações lineares dos vetores de β. Mas sabemos que
mais de três vetores em R3 são linearmente dependentes, portanto β tem um, dois
ou três vetores. Quando β = {v1 }, Γ = [[v1 ]] tem dimensão um. Sua representação
no espaço Cartesiano é uma reta que contém a origem. Quando β = {v1 , v2 }, o
subespaço Γ = [[v1 , v2 ]] tem dimensão dois. A representação de Γ é um plano que
2
contém a origem. Da mesma forma, Γ = R3 quando β tem três elementos.
Existem vários algoritmos para detectar se um subconjunto ordenado de n vetores do Rn é uma base ordenada ou não. Um muito prático utiliza determinantes.
Recordamos que
3.6. LEITURA COMPLEMENTAR
31
o determinante de uma matriz quadrada é igual a zero se, e somente se,
uma coluna é combinação linear de outras colunas.
Desta informação decorre um critério utilizado reiterada vezes ao longo do texto.
Dado um conjunto ordenado de n vetores β = {v1 , v2 , ..., vn } ⊂ Rn para saber se
eles são linearmente independentes ou não, calculamos o determinante da matriz
quadrada [v1 , v2 , ..., vn ] e verificamos se o determinante é diferente de zero ou não.
Proposição 3.5.1 Dado um conjunto ordenado de n vetores β = {v1 , v2 , ..., vn } ⊂
Rn . As seguintes afirmações são eqüivalentes:
i) β = {v1 , v2 , ..., vn } é uma base ordenada;
ii) det[v1 , v2 , ..., vn ] = 0;
iii) a1 v1 + a2 v2 + · · · + an vn = 0 se e somente se, a1 = a2 = · · · = an = 0.
A base ordenada tem orientação positiva se det[v1 , v2 , ..., vn ] > 0, caso contrário
diremos que ela tem orientação negativa.
3.6
Leitura complementar
1. Definição de Espaço Vetorial Um espaço vetorial real consiste de
I Um conjunto V cujos elementos são chamados de vetores.
II O corpo R cujos elementos são chamados de escalares.
III Uma operação chamada de adição de vetores em que cada par de vetores
u, v ∈ V é associado ao vetor u + v ∈ V , chamado de soma de u e v,
satisfazendo os seguintes axiomas:
a)
b)
c)
d)
a adição é comutativa, u + v = v + u;
a adição é associativa, (u + v) + w = u + (v + w);
existe um único elemento 0 tal que v + 0 = v para todo v ∈ V ;
para cada vetor v ∈ V existe um único vetor −v ∈ V tal que v +
(−v) = 0.
IV Uma operação chamada de multiplicação por escalar em que um vetor
v ∈ V e um escalar λ ∈ R são associados ao vetor λv ∈ V , chamado de
produto de v por λ, satisfazendo os seguintes axiomas:
a) 1v = v para todo v ∈ V ;
b) a multiplicação por escalar é associativa, λ1 (λ2 v) = (λ1 λ2 )v;
32
CAPÍTULO 3. O ESPAÇO VETORIAL RN
c) a multiplicação por escalar é distributiva em relação à adição de
vetores, λ(u + v) = λu + λv;
d) a multiplicação por escalar é distributiva em relação à adição de
escalares, (λ1 + λ2 )v = λ1 v + λ2 v.
Capı́tulo 4
Produto interno
No capı́tulo anterior apresentamos um conjunto algébrico formado pelas n-uplas
ordenadas de números reais, Rn , e induzimos no conjunto uma estrutura de espaço
vetorial real. Nosso objetivo é relacionar Rn , n = 1, 2, 3 com a Geometria Euclidiana. Para isto, é conveniente introduzir uma função bilinear, chamada de produto
interno em Rn que servirá para estabelecer conceitos tais como medida de segmentos
e medida de ângulos.
4.1
Produto interno e norma
Sejam v = (v1 , v2 , ..., vn ) e w = (w1 , w2 , ..., wn ) dois vetores de Rn . A aplicação
, : Rn × Rn → R
definida por
v, w = v1 w1 + v2 w2 + · · · + vn wn ,
é chamada de produto interno canônico do Rn . Para simplificar a escrita, diremos
apenas produto interno. Alguns texto também referem-se ao produto interno como
produto escalar. Registremos as propriedades básicas do produto interno.
Proposição 4.1.1 O produto interno , : Rn × Rn → R possui as seguintes
propriedades para quaisquer vetores v, w ∈ Rn e qualquer escalar λ ∈ R:
P1 v, v ≥ 0
e
v, v = 0 ⇔ v = 0;
P2 v, w = w, v;
(positiva definida)
(simetria)
P3 v + w, u = v, u + w, u;
(aditividade)
P4 λv, w = λv, w.
(linearidade)
Definido o produto interno, podemos iniciar a transposição dos conceitos de
comprimento, ângulo e distância originárias na Geometria. Iremos estudar nesta
seção a aplicação
: Rn → [0, +∞), v = v, v.
34
CAPÍTULO 4. PRODUTO INTERNO
O seu valor num vetor v ∈ Rn será chamado de norma de um vetor. Se desejarmos
escrevê-la utilizando coordenadas do vetor, v = (v1 , v2 , ..., vn ), obtemos a expressão
v = v12 + v22 + · · · + vn2 .
O valor v é interpretado, geometricamente, como o comprimento de um
−−→
segmento orientado P Q que representa o vetor v ∈ Rn .
Diremos que um vetor v é unitário quando v = 1.
Definição 4.1.1 Diz-se que uma aplicação : Rn → R é uma norma em Rn se
a aplicação possui as seguintes propriedades. Para quaisquer vetores u, v ∈ Rn e
escalar λ ∈ R valem as afirmações:
N1 v 0
e
v = 0 ⇔ v = 0;
(positiva definida)
N2 λv =| λ | v;
N3 v + w ≤ v + w.
(desigualdade triangular)
Recordamos que | λ | indica o valor absoluto de um número real. Para demonstrar as propriedades N1 , N2 , N3 , necessitamos de uma das mais importante
desigualdades associadas a um produto interno.
× Rn →
Teorema 4.1.1 (Desigualdade de Cauchy-Schwarz) Sejam , : Rn R o produto interno e : Rn → [0, +∞) a norma associada, v = v, v.
Então para quaisquer v, w ∈ Rn vale a desigualdade
| v, w |≤ vw,
e a igualdade ocorre se, e somente se, v e w são vetores colineares.
Proposição 4.1.2 (Norma associada) Seja , : Rn × Rn → R o produto in√
terno. A aplicação : Rn → R, v = < v, v >, é uma norma.
4.2
Ângulo entre vetores
A desigualdade de Cauchy-Schwarz, permite demonstrar que a norma associada ao
produto interno é de fato uma norma. Com a norma transpomos para o Rn a idéia
de comprimento. Mas a desigualdade de Cauchy-Schwarz também permite definir
medida de ângulos. A única informação extra que necessitaremos é bem conhecida,
para cada t ∈ [−1, 1] existe um único θ ∈ [0, π] tal que cos θ = t.
4.2. ÂNGULO ENTRE VETORES
35
Dados dois vetores não nulos v e w em Rn , desde que v = 0 e w = 0, a
desigualdade de Cauchy-Schwarz pode ser reescrita, neste caso, como
v, w
v, w
≤ 1.
ou equivalentemente,
−1≤
≤ 1.
vw
v w
Logo, podemos garantir que existe um único θ ∈ [0, π], o qual será chamado de
medida do ângulo entre os vetores não nulos v e w, tal que
cos θ =
v, w
.
v w
Portanto, para dois vetores não nulos, v e w, podemos escrever uma fórmula que
relaciona produto interno, norma (comprimento) e medida do ângulo,
v, w = v wcosθ,
onde θ ∈ [0, π] é a medida do ângulo entre os dois vetores. Muitas vezes, para deixar
claro que o ângulo considerado é aquele formado pelos vetores v e w, escrevemos
θ(v, w).
Diremos que dois vetores v e w em Rn são perpendiculares, ou ortogonais, e
escrevemos v ⊥ w, quando o produto interno entre eles é nulo, v, w = 0. O vetor
nulo é perpendicular a qualquer outro vetor. Convém observar que quando tais
vetores são não nulos estamos exigindo que o ângulo entre eles seja um ângulo reto,
pois se v e w são diferentes de zero, as igualdades
v, w = vw cos θ = 0
implicam que cos θ = 0. Como θ ∈ [0, π], concluı́mos que o ângulo entre os dois
vetores é reto, θ = π/2.
Um processo prático para construir um vetor perpendicular a um vetor não nulo
v = (a, b) ∈ R2 é considerar o vetor v ⊥ = (−b, a) ∈ R2 ou qualquer um de seus
múltiplos por um escalar, λv ⊥ .
Recordamos que temos apresentado subespaços próprios do R2 como conjuntos
definidos por uma equação linear homogênea. Examinemos a relação desta equação
com o produto interno.
Exemplo 4.2.1 Seja Γ = {(x, y) ∈ R2 ; 2x − 5y = 0}. Denotando por η = (2, −5) o
vetor formado pelos coeficientes da equação, podemos definir o subespaço de modo
equivalente: Γ é o conjunto formado pelos vetores v = (x, y) ∈ R2 tais que v é
ortogonal a η = (2, −5). De fato, efetuando o produto interno v, η = 0 obtemos
2x − 5y = 0. Logo, Γ = {(x, y) ∈ R2 ; v, η = 0}. O vetor η = (2, −5) é chamado de
vetor normal ao subespaço.
2
36
CAPÍTULO 4. PRODUTO INTERNO
Exemplo 4.2.2 Seja Γ ⊂ R3 , definido por uma equação linear homogênea, agora
com três variáveis. Por exemplo, examinemos o subespaço Γ = {(x, y, z) ∈ R3 ; x −
3y + 7z = 0}. Denotando por η = (1, −3, 7) o vetor do R3 formado pelos coeficientes
da equação, o subespaço pode ser descrito como sendo aquele formado por todos
vetores v = (x, y, z) que são ortogonais ao vetor η. Explicitamente, Γ = {v =
(x, y, z) ∈ R3 ; v, η = 0}. Novamente, o vetor η é dito ser o vetor normal ao
subespaço Γ.
2
Deixaremos para a próxima seção o estudo de subespaços própios do R3 definidos
por duas equações lineares homogêneas. Recordamos que o sı́mbolo δij chama-se
delta de Kronecker e seu significado é
1
se i = j
.
δij =
0
se i = j
Um conjunto ordenado γ = {v1 , v2 , ..., vk } ∈ Rn é dito ser um conjunto ortonormal quando para todos 1 ≤ i, j ≤ k vale vi , vj = δij . Em outras palavras, o
conjunto é formado por vetores unitários dois a dois ortogonais. Quando o conjunto
ordenado γ é uma base ordenada de Rn (portanto k = n), chamaremos γ de base
ortonormal. Por exemplo, a base canônica do Rn é ortonormal.
4.3
Produto vetorial em R3
O espaço Euclidiano R3 admite uma operação especial entre dois vetores chamado
de produto vetorial. Sejam v e w vetores de R3 . O produto vetorial de v por w,
denotado por v × w, é o vetor em R3 tal que para qualquer vetor u ∈ R3 , vale a
identidade
u, v × w = det[u, v, w].
O produto vetorial goza de várias propriedades importantes. A seguir, relacionaremos algumas delas e um algoritmo para calcular o produto vetorial de dois vetores.
Proposição 4.3.1 Sejam v = (v1 , v2 , v3 ) e w = (w1 , w2 , w3 ) vetores de R3 . Então:
i) v × w é perpendicular aos vetores v e w, simultaneamente;
ii) o produto vetorial de v por w é calculado pelo algoritmo
v1 w1
v1 w1
v2 w2
, − det
, det
;
v × w = det
v3 w3
v3 w3
v2 w2
iii) v × w2 = det[v, w, v × w] ≥ 0.
4.3. PRODUTO VETORIAL EM R3
37
Exemplo 4.3.1 Apresentaremos um outro algoritmo para avaliar mais rapidamente o produto vetorial e diminuir erros de cálculo. Sejam v = (3, 1, −4) e
w = (0, 2, 1) dois vetores do R3 . Para avaliarmos v × w, calculamos, formalmente,
o determinante de uma matriz do tipo [e, v, w], onde este sı́mbolo significa
3 0
e1
1 2 .
[e, v, w] = e2
e3 −4 1
Portanto, ao desenvolver o determinante pela primeira coluna é obtido
v × w = det[e, v, w] = 9e1 − 3e2 + 6e3 = (9, −3, 6).
Verifica-se facilmente que v, v × v = 0 e que w, v × w = 0.
Examinemos o conteúdo geométrico do item iii)
da proposição, v × w2 = det[v, w, v × w] = 126.
Como comentado no capı́tulo anterior, o valor
absoluto de det[v, w, v × w] é o volume do paralelepı́pedo no espaço Cartesiano construı́do de
tal forma que as arestas são segmentos orientados
representando os vetores v, w e v × w. Observe
que o segmento orientado representando o vetor
v ×w é perpendicular à base e esta base é o paralelogramo cujos lados são segmentos orientados
representando os vetores v e w.
Sendo assim, como o volume é a área da base multiplicado pela altura h = v × w
e o volume é ||v × w||2 , segue que, geometricamente, a norma do vetor v × w é a
área do paralelogramo cujos lados são segmentos orientados representando v e w.2
Exemplo 4.3.2 Sejam Γ1 = {(x, y, z) ∈ R3 ; x −
y + z = 0} e Γ2 = {(x, y, z) ∈ R3 ; 2x + y + z = 0}
dois subespaços do R3 . Como sabemos eles têm
dimensão dois (são plano) e são formados por
vetores ortogonais aos vetores η1 = (1, −1, 1) e
η2 = (2, 1, 1), respectivamente. A interseção Γ1 ∩Γ2
também é um subespaço e tem dimensão um (é
uma reta) e seus vetores são simultaneamente ortogonais aos vetores normais η2 e η2 . Logo, qualquer vetor na interseção é colinear com o produto
vetorial η1 × η2 = (−2, 1, 3). Portanto, Γ1 ∩ Γ2 =
2
[[η1 × η2 ]].
Proposição 4.3.2 (Fórmula de Lagrange) Para quaisquer dois vetores v e w
38
CAPÍTULO 4. PRODUTO INTERNO
do R3 vale a identidade
v × w2 = v2 w2 − v, w2 .
Em particular, se θ(v, w) é a medida do ângulo entre os vetores v e w, então
v × w = v wsen θ(v, w).
Exercı́cio 4.3.1 Existem várias relações entre os produtos interno e vetorial. Demonstre algumas delas.
1. (u × v) × w = u, wv − v, wu.
2. u, v × w = w, u × v = v, w × u.
u, w u, t
3. u × v, w × t = det
.
v, w v, t
(Produto vetorial duplo)
(Identidade cı́clica)
(Identidade de Lagrange)
Exercı́cios propostos 4.1
1. Mostre as identidades utilizando propriedades de determinantes.
(a) u × (v + w) = u × v + u × w.
(b) u × v = −v × u.
2. Sejam u e v vetores unitários e perpendiculares de R3 . Mostre que β = {u, v, u × v}
é uma base ortonormal.
3. Dados quatro vetores t, u, v, w ∈ R3 , é verdade que (t×u)×(v ×w) = (t×v)×(u×w)?
4. Sejam v, w ∈ R3 vetores não nulos e u ∈ R3 um vetor unitário tal que u ⊥ v e u ⊥ w.
Mostre que o ângulo entre os vetores v e w é igual ao ângulo entre os vetores u × v
e u × w, em outras palavras, θ(v, w) = θ(u × v, u × w). Interprete geometricamente
fazendo uma figura. Generalize o resultado. É necessário que u seja unitário? É
nescessário que u seja perpendicular aos outros dois vetores?
5. Mostre que dados os vetores v e w em R3 , então v × w = 0 se, e somente se, v e w
são colineares.
Capı́tulo 5
Transformações lineares
Faremos uma rápida revisão de transformações lineares enfatizando os algoritmos
clássicos relacionando transformações lineares e matrizes. Uma transformação linear
cujo domı́nio e contradomı́nio são iguais é chamada de operador linear.
5.1
Transformações lineares
Diz-se que uma aplicação A : Rm → Rn é uma transformação linear se para quaisquer vetores v, w ∈ Rn e para qualquer escalar λ ∈ R as seguintes condições são
verificadas:
1. A(v + w) = A(v) + A(w);
2. A(λv) = λA(w).
Uma transformação linear possui duas propriedades básicas, quais sejam, A(o) = o
A(−v) = −A(v), qualquer que seja v ∈ Rn .
Exemplo 5.1.1 Seguem exemplos para o leitor familiarizar-se com o conceito.
1. Verifica-se utilizando a definição que a aplicação A : R2 → R2 , A(x, y) =
(−x, 3y), é uma transformação linear.
2. A : R2 → R3 , A(x, y) = (3x + y, x − y, x + y), é uma transformação linear. 2
Construir ou identificar transformações lineares é bastante simples. Suponha
que A : Rm → Rn seja uma transformação linear. Como sabemos um vetor v =
(x1 , x2 , ..., xm ) no domı́nio da transformação linear é uma combinação linear dos
elementos da base canônica C = {e1 , e2 , ..., em }, a saber, v = x1 e1 +x2 e2 +· · ·+xm em .
Utilizando a definição de transformação linear temos que
40
CAPÍTULO 5. TRANSFORMAÇÕES LINEARES
A(x1 , x2 , ..., xm )
A(x1 e1 + x2 e2 + · · · + xm em )
A(x1 e1 ) + A(x2 e2 ) + · · · + A(xm em )
x1 A(e1 ) + x2 A(e2 ) + · · · + xm A(em ).
=
=
=
Façamos uma leitura da igualdade
A(x1 , x2 , ..., xm ) = x1 A(e1 ) + x2 A(e2 ) + · · · + xm A(em ).
Ela nos ensina que para construir uma transformação linear basta especificar quais
são seus valores na base canônica do domı́nio e definir a transformação linear pela
combinação linear à direita da igualdade. Também nos ensina como identificar uma
transformação linear. É suficiente que a imagem de um vetor seja uma combinação
linear como descrito na igualdade. E mais, se duas transformações lineares assumem
os mesmos valores na base canônica elas são idênticas.
Exemplo 5.1.2 Se desejamos construir uma transformação linear A : R2 → R3
basta especificar valores na base canônica do domı́nio C = {e1 , e2 }. Por exemplo,
se impusermos que A(1, 0) = (1, −1, 2) e A(0, 1) = (2, 0, 3), então construimos a
transformação linear como indicado,
A(x, y)
=
=
=
xA(e1 ) + yA(e2 )
x(1, −1, 2) + y(2, 0, 3)
(x + 2y, −x, 2x + 3y).
Portanto, em coordenadas temos que A(x, y) = (x + 2y, −x, 2x + 3y).
2
A cada transformação linear A : Rm → Rn destacamos dois subconjuntos, um
no contradomı́nio e o outro no domı́nio da transformação, chamados de imagem e
núcleo da transformação linear. São, respectivamente:
a) Im (A) = {w ∈ Rn ; w = A(v) para algum v ∈ Rm };
b) N uc (A) = {v ∈ Rm ; A(v) = 0}.
Exercı́cio 5.1.1 Prove que o núcleo e a imagem de uma transformação linear A :
Rm → Rn são subespaços do domı́nio e do contradomı́nio, respectivamente. Mostre
também que β = {A(e1 ), a(e2 ), ..., A(em )} é um conjunto de geradores de Im (A).
2
Dito de outro modo, mostre que Im (A) = [[A(e1 ), A(e2 ), ..., A(em )]].
Registremos numa proposição dois fatos simples e de bastante utilidade.
Proposição 5.1.1 Seja A : Rm → Rn uma transformação linear. Então
a) A é injetora ⇔ N uc(A) = {0};
b) A é sobrejetora ⇔ Im A = Rn .
5.2. MATRIZ
5.2
41
Matriz
Como vimos, uma transformação linear A : Rm → Rn fica completamente determinada quando conhecemos os valores de A na base canônica, A(e1 ), A(e2 ),...,A(em ).
Por este e outros motivos guardamos os valores A(ei ), i = 1, ..., m, numa matriz.
Definição 5.2.1 Seja A : Rm → Rn uma transformação linear. A matriz canônica
associada é a matriz n × m denotada e definida por
[A] = [A(e1 ), A(e2 ), ..., A(em )].
Exemplo 5.2.1 Seja A : R3 → R3 , A(x, y, z) = (x − z, −2x + 2y + 4z, −y + 2z).
Não é difı́cil verificar que A é um operador linear. A matriz 3 × 3 do operador linear
é obtida avaliando
A(1, 0, 0) = ( 1, −2, 0),
A(0, 1, 0) = ( 0, 2, 1),
A(0, 0, 1) = (−1, 4, 2).
Logo, a matriz é
1
0 −1
[A] = −2
2
4 .
0 −1
2
Ressaltamos que conhecida a matriz [A] recuperamos a transformação.
2
Exemplo 5.2.2 Suponha que a matriz de um operador linear A : Rm → Rn seja
1. A : R2 → R3 ,
10 −1
[A] = −2 31 , então
0
5
2. A(x, y) = (10x − y, −2x + 31y, 5y).
2
Exemplo 5.2.3 Calculemos a matriz canônica associada ao operador linear A :
R3 → R3 , A(x, y, z) = (2x − 3y, x + y − z, y − 4z). Avaliando
A(e1 ) = (2, 1, 0)
A(e2 ) = (−3, 1, 1),
A(e3 ) = (0, −1, −4),
obtemos a matriz 3 × 3
2 −3
0
[A] = 1
1 −1 .
0
1 −4
Avancemos um pouco mais. Considere os vetores
u = (1, 1, 0),
v = (−1, 2, 1),
w = (0, 3, −2).
Existe uma relação entre as matrizes [A(u), A(v), A(w)], [A] e [u, v, w]. Como
42
CAPÍTULO 5. TRANSFORMAÇÕES LINEARES
A(u) = (−1, 2, 1),
A(v) = (−8, 0, −2),
A(w) = (−9, 5, 11),
temos a seqüência de igualdades matriciais,
−1 −8 −9
0 −5
[A(u), A(v), A(w)] = 2
1 −2 11
2 −3
0
1 −1
0
= 1
1 −1 1
2
3
0
1 −4
0
1 −2
= [A][u, v, w].
Registraremos o algoritmo acima pois será explorado posteriormente.
2
Proposição 5.2.1 Seja A : Rm → Rn uma transformação linear e u1 , u2 , ..., um ∈
Rm . Valem as seguintes afirmações.
a) [A(u1 ), A(u2 ), ..., A(um )] = [A][u1 , u2 , ..., um ].
b) Se m = n então as matrizes descritas no item anterior são quadradas e
det [A(u1 ), A(u2 ), ..., A(um )] = det [A] det[u1 , u2 , ..., um ].
Comentário O último item da proposição contém uma informação geométrica
relacionada com operadores lineares que não está explicitada no enunciado. Examinemos o caso do operador linear A : R2 → R2 , A(x, y) = (2x − y, x + y). É fácil
calcular o determinante de [A], seu valor é det[A] = 3. Este é o fator de transformação de área, no seguinte sentido. Considere a área de um paralelogramo cujas
arestas são segmentos orientados que representam os vetores v e w. Como sabemos
o valor da área é | det[v, w]|. O operador linear A transforma este paralelogramo
num outro cujas arestas são representantes dos vetores A(v) e A(w). A área deste
último paralelogramo é | det[A(v), A(w)]|. O determinante det[A] = 3 é o fator que
relaciona as áreas do paralelogramo no domı́nio e a área do paralelogramo imagem,
| det[A(v), A(w)]| = | det[A] det[v, w]|.
Para operadores lineares A : R3 → R3 a interpretação é semelhante. O valor
| det[A]| é o fator de transformação de volumes quando consideramos um paralelepı́pedo cujas arestas são segmentos orientados representando os vetores u, v, w ∈
2
R3 .
5.3. OPERAÇÕES
43
Exemplo 5.2.4 É possı́vel calcular a matriz de uma transformação linear A :
Rm → Rn utilizando o produto interno. Mostre que as entradas da matriz [A] = [aij ]
são determinadas por aij = ei , A(ej ).
2
Para avançar no entendimento de transformações lineares precisaremos de um
resultado, conhecido como Teorema do núcleo e da imagem, do qual decorrem muitos
corolários. Intuitivamente falando, a dimensão do núcleo de A : Rm → Rn , está
medindo o quanto de dimensão foi perdida quando transformamos linearmente Rm
no subespaço Im(A) do contradomı́nio Rn .
Teorema 5.2.1 (Teorema do núcleo e da imagem) Seja A : Rm → Rn uma
transformação linear. Então
dim Rm = dim N uc(A) + dim Im(A).
5.3
Operações
Sejam A, B : Rm → Rn duas transformações lineares. Ressaltamos que o domı́nio e
o contradomı́nio de ambas são os mesmos. Definimos a aplicação soma das transformações lineares, A + B : Rm → Rn , por (A + B)(v) = A(v) + B(v). A nova
aplicação linear assim construı́da é também uma transformação linear.
Dado um escalar µ ∈ R, definimos a aplicação multiplicação µA : Rm → Rn ,
por (µA)(v) = µA(v). É rotina verificar que µA é uma transformação linear.
Proposição 5.3.1 Sejam A, B : Rm → Rn duas transformações lineares e λ ∈ R.
Então vale a relação matricial [A − λB] = [A] − λ[B].
Uma outra operação que efetuamos com transformações lineares é a composição.
Se A : Rm → Rn e C : Rn → Rk são duas transformações lineares, construı́mos uma
outra transformaçãolinear denotada por C ◦ A : Rm → Rk , chamada de composta
de C e A, definindo C ◦ A (v) = C(A(v)) para cada vetor v ∈ Rm . Para efetuar a
operação de composição é necessário que o contradomı́nio de A seja o domı́nio de
C. A composta é também uma transformação linear. Observe a relação entre as
matrizes [C ◦ A] [C], [A] descrita na proposição abaixo.
Proposição 5.3.2 Sejam A : Rm → Rn e C : Rn → Rk duas transformações
lineares. Então a composta C ◦ A : Rm → Rk é uma transformação linear e sua
matriz é [C ◦ A] = [C][A].
44
5.4
CAPÍTULO 5. TRANSFORMAÇÕES LINEARES
Invertibilidade
A operação de composição nos permite fixar um novo conceito. Uma transformação
linear A : Rm → Rn é invertı́vel se existe uma aplicação B : Rn → Rm tal que
B ◦ A = Id : Rm → Rm ,
e
A ◦ B = Id : Rn → Rn .
Aqui, o sı́mbolo Id indica a aplicação identidade do espaço considerado. Quando
existe uma tal aplicação diremos que B é a inversa de A e denotaremos a aplicação
inversa por A−1 : Rn → Rm .
Da Teoria de conjuntos sabemos que uma função entre dois conjuntos é invertı́vel
se, e somente se, a função é biunı́voca. Logo, por um critério para sobrejetividade e
injetividade citado anteriormente, podemos afirmar que uma transformação linear
A : Rm → Rn é invertı́vel se, e somente se, Im(A) = Rn e N uc(A) = {0}. Pelo
teorema do núcleo e da imagem, segue que m = n. Temos provado a
Proposição 5.4.1 Uma transformação linear A : Rm → Rn , é invertı́vel, se, e
somente se, Im(A) = Rn e N uc(A) = {0}. Em particular, se A é invertı́vel então
m = n.
Quando A : Rn → Rn é invertı́vel, sua matriz [A] é uma matriz quadrada n × n.
E mais, a matriz da inversa A−1 : Rn → Rn , também é uma matriz quadrada
n × n e valem as igualdades matriciais [Id] = [A ◦ A−1 ] = [A] [A−1 ]. No que segue,
desejamos relacionar transformações lineares invertı́veis com matrizes quadradas
invertı́veis. Uma matriz quadrada n × n, digamos M , é invertı́vel quando existe
uma matriz n × n, N , tal que o produto de ambas, não importa a ordem, é a matriz
identidade n × n,
1 0 ··· 0
0 1 ··· 0
.
MN =NM =
···
0 0 ··· 1
Neste caso, seguiremos a notação N = M −1 . Informamos que
uma matriz quadrada é invertı́vel se, e somente se, o seu determinante é não nulo.
Proposição 5.4.2 Se A : Rn → Rn é invertı́vel, então valem as afirmações:
a) só existe uma inversa para A;
b) a inversa A−1 é uma transformação linear;
c) a matriz de A é uma matriz invertı́vel n × n e [A−1 ] = [A]−1 .
5.5. OPERADORES LINEARES
45
O último item do teorema ensina como explicitar a inversa de uma transformação
linear invertı́vel. Devemos ter em mãos a matriz da transformação linear [A] que é
quadrada, inverter a matriz, [A]−1 , e recuperar a transformação linear A−1 . Existem
vários algoritmos para inverter matrizes quadradas. O leitor pode escolher um deles.
Corolário 5.4.1 Seja A : Rn → Rn uma transformação linear. Então as seguintes
afirmações são equivalentes:
a) A é invertı́vel;
b) N uc(A) = {0};
c) Im(A) = Rn ;
d) a imagem por A de uma base de Rn é uma base de Rn .
5.5
Operadores lineares
O restante do capı́tulo é dedicado aos operadores lineares e tem como objetivo final
apresentar o Teorema espectral, último teorema de qualquer livro texto introdutório
à Álgebra Linear. Antes, veremos como podemos contruir operadores lineares especificando seus valores numa base qualquer, e não apenas na base canônica.
Como visto anteriormente, para construir um operador linear A : Rn → Rn
basta estabelecer os valores de A nos vetores da base canônica C = {e1 , e2 , ..., en }.
Recapitulemos os procedimentos para n = 3. Se v = (x, y, z) é um vetor do R3 e
desejamos que A seja um operador linear devemos ter
A(x, y, z) = A(xe1 + ye2 + ze3 ) = xA(e1 ) + yA(e2 ) + zA(e3 ).
Portanto, basta estabelecermos os valores
A(e1 ) = u,
A(e2 ) = v,
A(e2 ) = w,
para definir o operador linear e obter imediatamente a sua matriz na base canônica,
[A] = [A(e1 ), A(e2 ), A(e3 )] = [u, v, w].
Quando o conjunto {u, v, w} for uma base de R3 o operador linear é invertı́vel
pois o conjunto {u, v, w} sendo uma base temos que 0 = det[u, v, w] = det[A]. Por
um critério mostrado anteriormente, garantimos que A é invertı́vel.
Podemos ir um pouco mais longe com a construção. Coloquemos a questão.
Questão Construir um operador linear C : R3 → R3 que aplica uma base
ordenada α = {u, v, w} num conjunto ordenado β = {u , v , v }.
Solução Basta seguir os procedimentos abaixo.
46
CAPÍTULO 5. TRANSFORMAÇÕES LINEARES
1o Construı́mos um operador linear A que aplica a base canônica C = {e1 , e2 , e3 }
na base α = {u, v, w}. Neste caso, como sabemos, a matriz é [A] = [u, v, w].
2o Construı́mos um operador linear B que aplica a base canônica C = {e1 , e2 , e3 }
no conjunto ordenado β = {u , v , v }. Neste caso, a matriz é [B] = [u , v , v ].
3o Consideramos o operador linear cuja matriz na base canônica é [C] = [B][A]−1 .
É claro que se o conjunto β também for uma base, o operador é invertı́vel.
5.6
Autovalores e autovetores
Nesta seção examinaremos a seguinte pergunta:
Dado um operador linear A : Rn → Rn . Existe um vetor não nulo v ∈ Rn e um
escalar λ ∈ R tal que A(v) = λv?
Antes de tudo, fixemos alguns termos.
Definição 5.6.1 Quando existe um vetor não nulo v ∈ Rn e existe um escalar
λ ∈ R tais que A(v) = λv, diremos que o vetor v é um autovetor de A associado
ao autovalor λ.1
Existe um procedimento padrão aplicado a qualquer operador A : Rn → Rn
para calcular seus autovetores e autovalores. Consideramos o operador identidade
Id : Rn → Rn e fazemos uma pergunta equivalente àquela feita no inı́cio da seção.
Existe um escalar λ tal que o núcleo de λId − A : Rn → Rn é não trivial?
De fato, se o núcleo de λId−A não for trivial, existe um vetor não nulo v pertencente
ao núcleo, isto é, λId(v)−A(v) = 0, de onde concluı́mos que A(v) = λv. A recı́proca
tem verificação imediata. Nesta altura da teoria, temos condições de responder à
última pergunta.
Existirá um escalar λ se, e somente se, λId − A é um operador não invertı́vel!
Em outras palavras, podemos responder da seguinte forma:
Existirá um escalar λ se, e somente se, det[λId − A] = 0!
Definição 5.6.2 Seja A : Rn → Rn um operador linear.
a) O núcleo do operador linear λId − A : Rn → Rn , é chamado de autoespaço
associado a λ, e iremos registrá-lo como Vλ = {v ∈ Rn ; A(v) = λv}.
1
Em alguns livros encontramos a terminologia valor próprio e vetor próprio.
5.7. TEOREMA ESPECTRAL
47
b) O polinômio de grau n, p(λ) = det[λId − A], é chamado de polinômio caracterı́stico de A.
Fixados os termos acima, reescrevamos a resposta de outra meneira:
Existirá um vetor não nulo v ∈ Rn tal que A(v) = λv se, e somente se, λ for
uma raiz real do polinômio caracterı́stico de A!
Recordemos que, sendo Vλ um subespaço, podemos encontrar uma base ordenada de autovetores, isto é, podemos escrever Vλ = [[v1 , v2 , ..., vk ]], onde A(vi ) = λvi
e αλ = {v1 , v2 , ...vk } é uma base ordenada para o subespaço.
Sendo o polinômio caracterı́stico de um operador linear A : Rn → Rn um polinômio com grau n, pode ocorrer que suas raı́zes reais sejam distintas ou não.
Portanto, pode ocorrer um número de autovalores entre 0 e n, inclusive, contadas
as repetições.
Lema 5.6.1 Sejam A : Rn → Rn um operador linear e β = {v1 , v2 , ..., vk } um
conjunto formado por autovetores de A associados aos autovalores λ1 , λ2 , ..., λk ,
respectivamente. Se os autovalores são distintos dois a dois então β é um conjunto
linearmente independente.
5.7
Teorema espectral
Existe uma classe de operadores lineares A : Rn → Rn cujo polinômio caracterı́stico
possui todas as raı́zes reais. Para descrevê-los, necessitamos do produto interno.
Para cada operador linear A : Rn → Rn , desejamos construir um outro operador
linear, chamado de operador transposto de A, denotado por At : Rn → Rn , que
possua a propriedade
v, A(w) = At (v), w,
para quaisquer v, w ∈ Rn . Para identificar matricalmente o operador linear At ,
observamos que as entradas da matriz [A] = [aij ] (ou qualquer outra matriz de uma
transformação linear) são determinadas por aij = ei , A(ej ). Logo, as entradas bij
da matriz [At ] devem ser
bij = ei , At (ej ) = At (ej ), ei = ej , A(ei ) = aji .
Portanto, a matriz do operador transposto de A é a transposta da matriz de A,
e registramos esta afirmação notacionalmente como [At ] = [A]t . Como existe uma
correspondência biunı́voca entre operadores lineares em Rn e matrizes n×n, também
mostramos que o operador transposto de A é único.
48
CAPÍTULO 5. TRANSFORMAÇÕES LINEARES
Diz-se que um operador linear A : Rn → Rn é simétrico se sua matriz [A]
é simétrica. Segue dos comentários acima que se A é simétrico vale a igualdade
v, A(w) = A(v), w para quaisquer dois vetores v, w ∈ Rn .
Na última seção, tomamos conhecimento que autovetores associados a autovalores distintos são linearmente independentes. Quando o operador é simétrico
podemos afirmar mais.
Lema 5.7.1 Sejam A : Rn → Rn um operador linear simétrico e β = {v1 , v2 , ..., vk }
um conjunto formado por autovetores de A associados aos autovalores λ1 , λ2 , ..., λk ,
respectivamente. Se os autovalores são distintos dois a dois então os vetores de β
são ortogonais dois a dois.
A existência de uma base ortonormal de autovetores de um operador linear
simétrico é um dos mais importantes teoremas de Álgebra Linear.
Teorema 5.7.1 (Teorema espectral) Se o operador linear A : Rn → Rn é simétrico então:
a) o polinômio caracterı́stico do operador linear, p(t) = det[tId − A], possui n
raı́zes reais, contando as repetições, λ1 , λ2 , ..., λn ;
b) existe uma base ortonormal de autovetores {u1 , u2 , ..., un }, onde A(ui ) = λi ui .
Um operador linear simétrico A : Rn → Rn é dito ser positivo quando v, A(v) >
0, qualquer que seja o vetor não nulo v ∈ Rn . O leitor pode mostrar que um operador
linear simétrico é positivo se, e somente se, todos os seus autovalores são positivos.
Definimos um operador linear simétrico negativo de forma análoga e concluı́mos que
todos os seus autovalores são negativos.
Capı́tulo 6
Isometrias do Rn
Desejamos identificar as aplicações de Rn que preservam a distância entre pontos, chamadas de isometrias ou movimentos rı́gidos. Iniciamos com a
definição de isometria e terminamos com um Teorema de classificação. Para percorrer de um extremo a outro será necessário lançar mão de tipos
especiais de operadores lineares e estabelecer algumas de suas propriedades. As definições, resultados e demonstrações feitas em R3 podem ser imediatamente generalizadas, para Rn , para qualquer
inteiro n > 1.
Nos estudos das geometrias com modelos, realizaremos o conceito de congruência
estabelecendo que os objetos são isométricos, isto é, existe uma isometria que aplica
biunivocamente um objeto sobre o outro, sejam eles, segmentos, ângulos, triângulos,
etc. Fixemos duas definições
Uma distância definida num conjunto S é uma função d : S × S → R que possui
as seguintes propriedades para quaisquer a, b, c ∈ S,
d1 d(a, b) ≥ 0 e d(a, b) = 0 ⇔ a = b;
d2 d(a, b) = d(b, a);
d3 d(a, b) ≤ d(a, c) + d(c, b).
(positiva definida)
(simétrica)
(desigualdade triangular)
Seja d : S × S → R uma função distância num conjunto S. Diz-se que uma função
f : S → S é uma isometria se f for bijetiva e d(f (s), f (t)) = d(s, t) para quaisquer
s, t ∈ S.
50
6.1
CAPÍTULO 6. ISOMETRIAS DO RN
Translações
Sabemos calcular o comprimento de vetores de Rn utilizando a norma . Agora,
iremos considerar uma função d : Rn × Rn → R, chamada de distância, cuja interpretação geométrica é medir a distância entre dois pontos do conjunto Rn . Por
definição ela será
d(v, w) = w − v.
Geometricamente a distância entre os pontos v e w é o comprimento do segmento
−−→
orientado V W . Se v = (v1 , v2 , ..., vn ) e w = (w1 , w2 , ..., wn ) então podemos escrevêla na forma
d(v, w) = (w1 − v1 )2 + (w2 − v2 )2 + · · · + (wn − vn )2 .
Proposição 6.1.1 A aplicação d : Rn → R, d(v, w) = w − v, é uma distância.
A demonstração ficará como exercı́cio. O restante deste capı́tulo será dedicado
a estudar as isometrias de Rn em relação a esta distância. Vejamos um primeiro
tipo de isometria.
Fixado um vetor a ∈ Rn . Uma translação por a é a função Ta : Rn → Rn ,
Ta (v) = v + a. Verifiquemos que uma translação é uma isometria do Rn :
d(Ta (u), Ta (v)) = Ta (v) − Ta (u) = (v + a) − (u + a) = v − u = d(u, v).
Isto mostra que Ta preserva distância. Examinemos a injetividade. Suponha que
Ta (u) = Ta (v). Como u + a = v + a, é imediato concluı́rmos que u = v. Para
mostrar a sobrejetividade considere w ∈ R3 . É claro que que Ta (w − a) = w.
Exercı́cios propostos 6.1
1. Explicite Ta+b : R3 → R3 quando a = (1, 1, 2) e b = (3, −1, 2).
2. Dadas as translações Ta : Rn → Rn e Tb : Rn → Rn . Prove que Ta ◦ Tb e T−a são
tranlações e que T−a é a inversa de Ta . É verdade que Ta ◦ Tb = Tb ◦ Ta ?
3. Dados os vetores u0 = (1, 2, 1) e v0 = (−1, 1, 0) determine uma translação Ta : R3 →
R3 tal que Ta (u0 ) = v0 .
4. Dados quaisquer dois pontos u0 , v0 ∈ R3 , mostre que existe uma única translação
T : R3 → R3 tal que T (u0 ) = v0 .
5. Verifique que o operador linear U : R3 → R3 é isometria quando
a) U (x, y, z) = (x, z, y);
b) U (x, y, z) = (z, x, y).
6. Sejam f : R3 → R3 e g : R3 → R3 isometrias. Prove que a composta f ◦ g : R3 → R3
é uma isometria.
6.2. OPERADORES ORTOGONAIS
6.2
51
Operadores ortogonais
Diz-se que uma aplicação U : Rn → Rn é ortogonal se, e somente se,
U (u), U (v) = u, v
para quaisquer
u, v ∈ Rn .
Numa linguagem mais técnica, dizemos que uma aplicação ortogonal é uma aplicação
que preserva o produto interno. Tais aplicações existem. Um exemplo distinto da
identidade é a aplicação antı́poda U : Rn → Rn , U (v) = −v, pois para quaisquer
u, v ∈ Rn temos
U (u), U (v) = −u, −v = (−1) · (−1)u, v = u, v.
Como vimos, uma translação do Rn por um vetor a ∈ Rn é uma isometria. Se
o vetor é não trivial, a translação não preserva a origem, isto é, Ta (0, 0, ..., 0) =
(0, 0, ..., 0). Por outro lado, a única translação que preserva a origem é a identidade.
Entretanto, existem muitas isometrias que preservam a origem, além da identidade.
Iniciaremos o estudo tendo como objetivos:
1. demonstrar que uma aplicação ortogonal é um operador linear;
2. identificá-lo examinando apenas a matriz canônica associada;
3. descrever um método prático para construı́-los.
Exemplo 6.2.1 Apresentaremos um exemplo ilustrativo. Escolha qualquer base
ordenada ortonormal β = {u1 , u2 , u3 } ⊂ R3 . Base ortonormal significa que ui , uj =
δij (δij é o delta de Kronecker). Defina o operador linear U : R3 → R3 , cuja matriz
é [U ] = [u1 , u2 , u3 ]. Como sabemos, podemos explicitar o operador linear,
U (x, y, z) = xu1 + yu2 + zu3 .
A próxima proposição garante que esta é a maneira de construir qualquer aplicação
ortogonal, portanto, todas elas são operadores lineares.
2
Na leitura complementar deste capı́tulo apresentamos o processo de ortogonalização de Gram-Schmdit, um processo para construir bases ortonormais, ou seja,
um método para obter todos os operadores lineares ortogonais.
Proposição 6.2.1 Seja U : Rn → Rn uma aplicação. Então, U é uma aplicação
ortogonal se, e somente se,
a) β = {U (e1 ), U (e2 ), ..., U (en )} é uma base ortonormal do Rn e
b) U é um operador linear.
CAPÍTULO 6. ISOMETRIAS DO RN
52
Prova ⇒) Iniciemos mostrando o item a). Faremos a demonstração para aplicações
ortogonais em R3 , mas ela é análoga para o Rn . Seja C = {e1 , e2 , e3 } a base canônica
do R3 . Por definição de aplicação ortogonal temos
< U (ei ), U (ej ) >=< ei , ej >= δij .
Isto significa que o conjunto U (β) = {U (e1 ), U (e2 ), U (e3 )} é um conjunto ortonormal. Recordando que para verificarmos que o conjunto de três vetores U (β) ⊂ R3 é
uma base basta verificarmos que seja linearmente independente. Vamos supor que
existam escalares a1 , a2 , a3 tais que a1 U (e1 ) + a2 U (e2 ) + a3 U (en ) = o. Calculando
o produto interno de U (ej ) com o vetor nulo temos que
0 = o, U (ej )
= a1 U (e1 ) + a2 U (e2 ) + a3 U (e3 ), U (ei )
= a1 U (e1 ), U (ej ) + a2 U (e2 ), U (ei ) + a3 U (e3 ), U (ei )
= ai .
Logo, U (β) é um conjunto linearmente independente e consequentemente uma base
do R3 , provando o item a).
b) Pelo item anterior, sabemos que U (C) = {U (e1 ), U (e2 ), U (en )} é uma base
ortonormal do R3 . Sendo assim, dado o vetor v = (v1 , v2 , v3 ) ∈ R3 podemos expressá-lo como uma combinação linear da forma
U (v) = a1 U (e1 ) + a2 U (e2 ) + a3 U (e3 ),
onde os coeficientes são únicos. Identifiquemos os coeficientes da combinação linear.
Lembrando-se que U é uma aplicação ortogonal,
ai = U (v), U (ei ) = v, ei = vi .
Logo,
U (v1 , v2 , v3 ) = v1 U (e1 ) + v2 U (e2 ) + v3 U (e3 ).
Como bem sabemos, esta é a maneira de definir uma transformação linear.
⇐) Seja U : R3 → R3 um operador linear tal que U (C) = {U (e1 ), U (e2 ), U (e3 )}
seja uma base
que U é uma aplicação ortogonal. Dados os
ortonormal. Mostremos
vetores v = 3i=1 vi ei e w = 3i=1 wi ei , sendo U um operador linear temos que
U (v) = 3i=1 vi U (ei ), U (w) = 3j=1 wj U (ej ).
Como o produto interno é linear em cada variável e U preserva produto interno,
temos que
U (v), U (w) = 3i=1 ai bi U (ei ), U (ei ) = 3i=1 ai bi = v, w.
Isto conclui a demonstração da proposição.
2
6.3. CLASSIFICAÇÃO DAS ISOMETRIAS
53
Exercı́cios propostos 6.2
1. Seja U : Rn → Rn um operador ortogonal. Mostre que
a) U preserva a norma, U (u) = u;
b) U preserva ângulo entre vetores, θ(U (u), U (v)) = θ(u, v);
c) U é injetiva.
2. Mostre que U : Rn → Rn é um operador ortogonal se, e somente se, [U ]t [U ] = [Id].
3. Mostre que U : R2 → R2 é um operador ortogonal se, e somente se, sua matriz
canônica tem uma das duas formas cos θ −sen θ
cos θ
sen θ
[U ] =
ou [U ] =
.
sen θ
cos θ
sen θ − cos θ
6.3
Classificação das isometrias
Chegamos ao nosso objetivo final. Provar que toda aplicação que preserva distância
em Rn é a composta de uma translação com um operador ortogonal. Como feito
antes, demonstraremos para n = 3 mas os argumentos utilizados valem pra qualquer
n > 1.
Teorema 6.3.1 (Classificação das isometrias) Uma aplicação f : Rn → Rn é
uma isometria, se e somente se, existe uma translação Ta : Rn → Rn e um operador
ortogonal U : Rn → Rn tal que f (x) = T ◦ U (x).
Prova ⇒) Denote por a = f (0) e considere a aplicação U : R3 → R3 definida por
U (v) = f (v) − a. Desejamos mostrar que U é uma aplicação ortogonal. Mostremos
primeiro que U (v) − U (w) = v − w, para todo v, w ∈ R3 . Mas isto é verdade
pois, sendo f uma aplicação que preserva distância, temos as igualdades
U (v) − U (w) = f (v) − a − f (w) + a
= f (v) − f (w)
= d(f (w), f (v))
= d(w, v)
= v − w.
Passemos a mostrar que U é uma aplicação ortogonal. Por um lado temos que
U (v) − U (w)2 = U (v) − U (w), U (v) − U (w)
= U (v)2 − 2U (v), U (w) + U (w)2
= v2 − 2U (v), U (w) + w2 ,
54
CAPÍTULO 6. ISOMETRIAS DO RN
por outro lado, com um cálculo simples verificamos que v − w2 = v2 − 2v, w +
w2 . Logo, U (v), U (w) = v, w. Como U é uma aplicação ortonormal, segue
que U é um operador linear ortonormal, de onde concluı́mos que f (v) = U (v) + a,
ou seja, f (v) = Ta ◦ U (v).
A recı́proca deixaremos aos cuidados do leitor. Siga o roteiro abaixo.
1o
2o
3o
4o
5o
Mostre que um operador ortogonal U preserva norma.
U preserva distância.
Mostre que a imagem da base canônica é uma base.
U é bijetivo.
Mostre que a composta de U com uma translação é uma isometria.
2
Exercı́cios propostos 6.3
1. Considere os planos em R3 ,
Γη (p),
Γν (q),
onde η = (3, 1, −1) e p = (0, 0, 0)
.
onde ν = (1, 1, −1) e q = (2, 1, 2)
a) Existe translação Tv0 : R3 → R3 que aplica o primeiro plano no segundo?
b) Construa uma isometria S : R3 → R3 que aplica o primeiro plano no segundo.
2. A mesma questão anterior para os planos
Γη (p) onde η = (1, −1, 2) e p = (0, 1, 1)
.
Γν (q) onde ν = (2, 1, −2) e q = (3, 2, 2)
3. Encontre a equação paramétrica de um cı́rculo de raio r = 2 quando ele está
a) centrado no ponto p = (1, 2, 1) e contido no plano Γη (p), onde η = (3, −1, 2);
b) centrado no ponto p = (1, 2, 0) e contido no plano Γη (p), onde η = (0, 0, 1).
4. Encontre a equação paramétrica de uma elipse cujo eixo maior mede a = 2 e eixo
menor mede b = 1 centrada no ponto p = (3, 2, 0) e contido no plano Γη (p), onde
η = (0, 0, 1).
5. Defina uma função g : R3 → R3 que deixa o plano Γ1 = {(x, y, z) ∈ R3 : z = 0}
invariante e transforma o cı́rculo do exercı́cio 3.a) na elipse do exercı́cio 4.
6. Encontre a equação paramétrica de uma elipse centrada no ponto (1, 2, 1) ∈ Γ1 =
{(x, y, z) ∈ R3 : x − y + 2z = 1} cujo eixo maior mede 3 e eixo menor mede 1.
7. Seja U : R3 → R3 um operador ortogonal tal que U (e3 ) = e3 . Mostre que existe
θ ∈ [0, 2π] tal que U (e1 ) = (cos θ, sen θ, 0) e U (e2 ) = (−sen θ, cosθ, 0).
8. Prove que conjunto G formado por todas as isometrias de R3 equipado com a operação
de composição de funções é um grupo.
9. Encontre uma isometria de R3 que transforma o triângulo ∆ cujos vértices são a =
(1, 1, 1), b = (2, 3, 1) e c = (3, 4, 5) num triângulo contido no plano z = 0 congruente
ao triângulo ∆ com um dos vértices na origem.
6.4. *LEITURA COMPLEMENTAR
6.4
55
*Leitura complementar
1. Processo de ortogonalização de Gram-Schmidt Na demonstração da
proposição a seguir está descrito um processo para construir uma base ortonormal para um subespaço não trivial qualquer de Rn .
Proposição 6.4.1 Todo subespaço não trivial Γ ⊂ Rn possui uma base ortonormal.
Demonstração Escolha γ = {w1 , w2 , ..., wk } uma base ordenada qualquer de
Γ. Defina o subespaço de dimensão i, Γi = [[w1 , ..., wi ]]. Sendo assim, valem
as inclusões próprias de subespaços
Γ0 = {0} Γ1 Γ2 · · · Γk = Γ.
Feitos estas preliminares iniciemos a construção indutiva de uma base ortogonal pelo processo de ortogonalização de Gram-Schmidt. A base ortogonal de
Γ1 será β1 = {v1 } em que v1 = w1 . Para construir uma base ortogonal para
Γ2 consideramos o conjunto ordenado β2 = β1 ∪ {v2 } onde
v2 = w2 −
w2 ,v1 v1 ,v1 v1 .
O vetor v2 está bem definido pois v1 não sendo nulo temos que v1 , v1 > 0.
Note que também o vetor v2 não é nulo, caso contrário concluı́mos que w1 e w2
são vetores linearmente dependentes, contrariando o fato de γ ser uma base
de Γ. Por outro lado verificamos facilmente que v1 , v2 = 0 de onde segue
que β2 ⊂ Γ2 é um conjunto linearmente independente num espaço vetorial de
dimensão dois, implicando que β2 = β1 ∪ {v2 } é uma base ortogonal de Γ2 .
Por hipótese de indução, vamos assumir que já construı́mos uma base ortogonal βi = {v1 , v2 , ..., vi } para o subespaço Γi . Seja βi+1 = βi ∪ {vi+1 }, onde
vi+1 = wi+1 −
wi+1 ,v1 v1 ,v1 v1
−
wi+1 ,v2 v2 ,v2 v2
− ··· −
wi+1 ,vi vi ,vi vi .
Novamente, vi+1 está bem definido e é um vetor em Γi+1 . O vetor vi+1
não é nulo, caso contrário teremos wi+1 ∈ Γi contrariando a hipótese de γ
ser linearmente independente. Uma simples verificação mostra que βi+1 é
um conjunto de vetores não nulos dois a dois ortogonais no subespaço Γi+1 ,
cuja dimensão é i + 1. Segue que βi+1 é uma base ortogonal deste espaço.
Continuando o processo um número de vezes igual à dim Γ, obtemos uma
base ortogonal de Γ.
Para finalizar, dividimos cada vetor de βk por sua norma para obter uma base
ortonormal.
2
Parte III
GEOMETRIA EUCLIDIANA
Capı́tulo 7
Geometria Euclidiana
Construir um modelo para a Geometria Euclidiana é fixar um conjunto algébrico
especı́fico, que será chamado de plano, estabelecer quais dos seus subconjuntos
serão nomeados de retas, realizar também os outros termos indefinidos do sistema
axiomático, isto é, dar um significado aos termos congruência, está entre, etc. e
finalmente verificar que todos os axiomas de Hilbert são válidos neste contexto.
O objetivo agora é indicar como executar todas estas tarefas no conjunto algébrico
R2 . Ficará claro o motivo pelo qual dizemos que R2 é o modelo canônico do plano
Euclidiano. A Álgebra Linear será a linguagem utilizada para a construção do
modelo.
Axiomas da Geometria Euclidiana plana
I Termos indefinidos
1. Ponto, reta, plano, pertence, está entre e congruência.
II
III
IV
III
IV
7.1
Axiomas de
Axiomas de
Axiomas de
Axioma das
Axiomas de
incidência
ordem
Congruência
Paralelas
Continuidade
Esferas e hiperplanos
Na Geometria Euclidiana plana, um cı́rculo de centro C ∈ E2 e raio r > 0 é o
conjunto constituı́do por todos os pontos do plano cuja distância ao ponto C é igual
58
CAPÍTULO 7. GEOMETRIA EUCLIDIANA
a r. Na Geometria Euclidiana espacial uma esfera com centro C ∈ E3 e raio r > 0
é definida como sendo o conjunto dos pontos que distam de C por uma distância r.
Iniciemos a construção definindo os dois conceitos. Recordamos que indicamos por
d a distância no espaço Rn induzida pelo produto interno canônico.
Definição 7.1.1 Uma esfera em Rn de raio r > 0 e centro c ∈ Rn é o subconjunto
denotado e definido por Sn−1
(c) = {v ∈ Rn ; d(c, v) = r}.
r
Como na equação d(c, v) = r a distância e o raio são não negativos, esta equação
em termos de coordenadas dos pontos, v = (x1 , x2 , ..., xn ) e c = (c1 , c2 , ..., cn ), é
equivalente à equação
(x1 − c1 )2 + (x2 − c2 )2 + · · · + (xn − cn )2 = r 2 .
Uma esfera em R2 recebe o nome de cı́rculo. Quando o cı́rculo tem raio r = 1
e centro na origem, c = (0, 0), diremos que ele é o cı́rculo unitário canônico e
denotamos por S1 . Em resumo,
S1 = {(x, y) ∈ R2 ; x2 + y 2 = 1}.
S2
A esfera em R3 centrada na origem, c = (0, 0, 0), e de raio r = 1 é denotada por
e é chamada de esfera unitária canônica. Pelo visto,
S2 = {(x, y, z) ∈ R3 ; x2 + y 2 + z 2 = 1}.
Recordamos que indicamos o produto interno canônico do Rn por , .
Definição 7.1.2 Um hiperplano com vetor normal η ∈ Rn contendo o ponto p ∈ Rn
é o subconjunto denotado e definido por Γη (p) = {v ∈ Rn ; v − p, η = 0}.
Nomearemos a equação de um hiperplano na forma Γη (p) : v − p, η = 0.
Exercı́cios propostos 7.1
1. Determine a equação do cı́rculo centrado em c ∈ R2 e raio r, onde
√
iii) c = (−3, 4) e r = 5.
i) c = (1, 0) e r = 12 .
ii) c = (1, 1) e r = 2.
2. Identifique as curvas e faça um esboço gráfico das seguintes equações em R2 .
i) x2 + 2x + y 2 = 0. ii) x2 − x + y 2 − y = 7. iii) x2 + 6x + y 2 + 8y = 0.
3. Determine a equação do hiperplano Γη (p) ⊂ R3 em que
i) η = (1, 0, −1) e p = (−2, 1, 1). ii) η = (−2, 1, 1) e p = (1, 0, −1).
4. Determine a equação do hiperplano Γη (p) ⊂ R2 em que
i) η = (1, −1) e p = (−2, 1). ii) η = (−2, 1) e p = (1, −1).
7.2. UM MODELO DE PLANO EUCLIDIANO
7.2
59
Um modelo de plano Euclidiano
Iniciemos a construção.
Chamaremos R2 de plano e seus elementos de pontos.
Um hiperplano em R2 será chamado de reta.
Examinemos com mais vagar a definição de reta em R2 . É conveniente fixar uma
notação para indicá-la. Sejam p = (p1 , p2 ) e η = (η1 , η2 ) pontos em R2 . O plano com
vetor normal η contendo o ponto p tem equação lη (p) : (x, y)−(p1 , p2 ), (η1 , η2 ) = 0,
ou seja,
lη (p) : η1 x + η2 y + η3 = 0,
onde η3 = −p, η. Ao tomarmos como vetor normal um múltiplo não nulo de η,
digamos λη com λ = 0, as retas são iguais como conjuntos, lη (p) = lλη (p), pois a
equação desta última fica sendo lλη (p) : λη1 x + λη2 y + λη3 = 0 e, como λ = 0, os
pontos v = (x, y) ∈ R2 que satisfazem a uma equação também satisfazem a outra
equação e vice-versa
Um caso particular, porém importante, são as retas que contêm a origem. Reservamos uma notação especial para elas, em lugar de escrevermos lη (o) quando
o = (0, 0), omitiremos do sı́mbolo o ponto o escrevendo simplesmente lη . Sendo
assim, a equação da reta é homogênea,
lη : η1 x + η2 y = 0.
Anteriormente, utilizamos equações lineares homogêneas para definir um subespaço
vetorial, portanto, a reta lη contendo a origem é um subespaço vetorial próprio do
R2 de dimensão 1. Uma base ordenada é formada por qualquer vetor não nulo no
subespaço, por exemplo η ⊥ = (−η2 , η1 ) ∈ lη .
Façamos um resumo do que temos até o momento:
um conjunto, R2 , chamado de plano;
elementos deste conjunto chamados de pontos;
subconjuntos lη (p) nomeados de retas;
entendemos o conceito de um ponto pertencer a uma reta (incidência).
Desejamos que R2 seja um modelo algébrico do plano Euclidiano. Somente com os
termos fixados acima já podemos verificar que o grupo de axiomas de incidência é
satisfeito. Por exemplo.
Dois pontos distintos determinam uma reta
Dados dois pontos distintos de R2 , digamos que sejam p = (p1 , p2 ) e q = (q1 , q2 ).
Consideramos o vetor não nulo η ⊥ = q − p = (q1 − p1 , q2 − p2 ), tomamos η =
60
CAPÍTULO 7. GEOMETRIA EUCLIDIANA
(−q2 + p2 , q1 − p1 ) e escolhemos a reta lη (p). Verifica-se que as coordenadas dos
2
pontos p e q satisfazem a equação, logo, os pontos pertencem à reta lη (p).
O objetivo deste texto não é verificar todos os detalhes da construção de um
modelo para a Geometria Euclidiana. Estamos mais interessados em exibir modelos
para outras geometrias, quais sejam, elı́ptica, projetiva e afim. Como o leitor já
estudou em Geometria Analı́tica a maioria dos conceitos e técnicas aqui utilizados,
deixaremos apenas um roteiro desta construção.
Ficará como exercı́cio a verificação da validade dos dois outros axiomas do grupo
de axiomas de incidência.
Está entre
Dada a reta lη (p), defina a função biunı́voca f : R → lη (p), f (t) = p + tη ⊥ .
Recordamos que se η = (η1 , η2 ) então η ⊥ = (−η2 , η1 ). Diremos que o ponto p =
f (t1 ) está entre n = f (t0 ) e q = f (t2 ) se, e somente se, t0 < t1 < t2 . Com isto,
estabelecemos um significado para este termo indefinido e demonstramos todos os
axiomas de ordem e continuidade, além de podermos definir segmentos de reta. É
necessário verificar que o conceito não depende do vetor normal nem do ponto p.
Por definição, o segmento de reta [p, q] é o conjunto formado por p, q e os
pontos da reta determinada pelos pontos p e q que estão entre eles. A medida do
comprimento de um segmento [p, q] é a distância entre os pontos extremos, d(p, q).
Dois segmentos de reta são congruentes se existe uma isometria
do R2 que aplica biunivocamente um segmento no outro.
Para definir ângulo necessitaremos do conceito de reta orientada. Antecipamos
que os procedimentos que seguem serão semelhantes em qualquer outro modelo de
geometria que estudaremos posteriormente.
A notação lη , além de indicar que o conjunto é uma reta e tem como vetor normal
o vetor não nulo η, indicará que a reta está orientada por η. Ao escrevermos l−η ,
a reta é a mesma, como conjunto, entretanto como reta orientada são distintas.
Precisemos o comentário. Ao dizermos ”a reta está orientada pelo vetor normal
η” transmitiremos a infomação que o lado de ”cima” da reta é precisamente o lado
para o qual o vetor η está apontando. Isto pode ser formalizado estabelecendo que
um vetor v está no semi-plano positivo Hη (p) definido por lη quando v − p, η ≥ 0.
Algebricamente temos
Hη (p) = {v ∈ R2 ; v − p, η ≥ 0}.
Se o produto interno não é positivo, o vetor v está no semi-plano negativo. Observe
que a reta é definida como o conjunto dos pontos cujo produto interno é zero.
Sendo assim, uma reta lη (p) pode ser orientada somente de dois modos, pelos
7.2. UM MODELO DE PLANO EUCLIDIANO
61
vetores que são múltiplos positivos de η e pelos vetores que são múltiplos negativos
de η.
Um ângulo é o conjunto obtido pela interseção entre dois semiplanos positivos,
Hη (p) ∩ Hµ (q).
Dois ângulos são congruentes se existe uma isometria de R2 que
aplica biunivocamente um ângulo no outro.
Após estas definições verifica-se todos os axiomas de congruência.
A medida do ângulo Hη (p) ∩ Hµ (q) é, por definição, o ângulo entre os vetores η
e −µ. Na notação aqui utilizada a medida fica indicada por θ(η, −µ).
Axioma das paralelas
Seja q um ponto que não esteja esteja na reta lη (p). A reta lη (q) é a uma reta
paralela à primeira reta e é a única reta paralela que incide em q. Isto é mostrado
verificando-se que o sistema de equações lineares fomado pelas equações que definem
as retas não tem solução.
Exercı́cios propostos 7.2
1. Dado os segmentos [p, q] e [m, n] em R2 . Mostre que as afirmações são equivalentes.
(a) Os segmentos são congruentes.
(b) Existe uma isometria U : R2 → R2 tal que U (p) = m e U (q) = n.
(c) d(p, q) = d(m, n).
2. Mostre que os segmentos [p, q] e [m, n] do R2 são
de congruência quando:
a) p = (1, −1), q = (0, 1),
m = (−1, 0)
b) p = (1, −1), q = (0, 1),
m = (2, 0)
c) p = (2, −5), q = (1, −4), m = (2, 0)
congruentes e construa a isometria
e n = (1, 1);
e n = (1, 2);
e n = (1, 1).
3. Considere o ângulo Hη (p) ∩ Hµ (q). Mostre as afirmações.
(a) A medida do ângulo é α = π − θ(η, µ).
(b) Dois ângulos são congruentes se, e somente se, as medidas de seus ângulos são
iguais.
4. Calcule as medidas dos ângulos determinados pelas retas orientadas lη (p) e lµ (q)
quando:
a) η = (1, 2),
p = (1, 2), ν = (2, −1) e q = (0, 1);
b) η = (1, −2), p = (0, 0), ν = (1, 2)
e q = (0, 1).
5. Diremos que os segmentos [p, q] e [m, n] do R2 são equivalentes (∼) se, e somente se,
eles são congruentes. Mostre que ∼ é uma relação de equivalência.
6. Mostre que semi-planos e ângulos são conjuntos convexos.
62
7.3
CAPÍTULO 7. GEOMETRIA EUCLIDIANA
Um modelo de espaço Euclidiano
Passemos a contruir um modelo para a Geometria sólida (espacial).
R3 será chamado de espaço e seus elementos de pontos.
Um hiperplano em R3 será chamado de plano.
Sejam p = (p1 , p2 , p3 ) e η = (η1 , η2 , η3 ). O plano Γη (p) com vetor normal η
contendo o ponto p tem a seguinte equação em termos de coordenadas,
Γη (p) : η1 x + η2 y + +η3 z + k = 0,
onde k = −p, η. Novamente, reservaremos uma notação especial para um plano
que contém a origem. Em lugar de escrevermos Γη (o) omitiremos o ponto o =
(0, 0, 0) da notação e escrevemos Γη . Neste caso particular, a equação do plano é
homogênea,
Γη : η1 x + η2 y + η3 z = 0.
Como já sabemos, Γη é um subespaço vetorial de R3 e podemos encontrar dois
vetores não colineares, v0 , w0 ∈ Γη , tais que qualquer outro vetor u ∈ Γη é como
uma combinação linear u = sv0 + tw0 , onde s, t ∈ R. Para saber se os vetores geram
o plano basta verificar se o conjunto β = {v0 , w0 , η} é uma base de R3 . Pelo critério
estabelecido, é suficiente verificar que det [v0 , w0 , η] = 0.
Resumindo, temos:
um conjunto, R3 , que será chamado de espaço;
elementos deste conjunto que chamamos de pontos;
subconjuntos Γη (p) nomeados de plano;
entendemos o conceito de um ponto pertencer a um plano (incidência).
Como feito na modelagem com R2 deverı́amos definir todos os outros termos
envolvidos na axiomatização. Mas a construção é tão semelhante que deixaremos
aos cuidados do leitor esboçar a construção. Apresentemos dois exemplos numéricos
que ilustram quais os procedimentos utilizados.
Exemplo 7.3.1 [Plano determinado por três pontos não colineares] Dados
três pontos distintos de R3 , digamos a = (1, 0, 1), b = (2, 1, 1) e c = (−1, −2, −3).
Primeiro verifiquemos que eles são não colineares calculando
1 2 −1
det[a, b, c] = 0 1 −2 = −3 = 0.
1 1 −3
O determinante ser diferente de zero implica que eles são não colineares. Agora
consideremos os vetores
7.3. UM MODELO DE ESPAÇO EUCLIDIANO
63
u = b − a = (1, 1, 0)
.
v = c − a = (−2, −2, −4)
e tomemos como vetor normal ao plano que desejamos construir, contendo os pontos
a, b e c, o vetor η = u×v = (−4, 4, 0). Agora, se v = (x, y, z), calculando v −a, η =
0 em termos de coordenadas, obtemos a equação Γη : −4x + 4y + 4 = 0. É simples
verificar que as coordenadas dos pontos a, b e c satisfazem esta equação. Portanto,
2
eles pertencem ao plano Γη .
Exemplo 7.3.2 [Retas em R3 ] Uma reta em R3 é o conjunto determinado pela
interseção de dois planos não paralelos. Seja s a reta obtida por interseção dos
planos Γη (p) e Γν (q). Como os planos não são paralelos os vetores normais não são
colineares. Para informar o fato, podemos escrever s = Γη (p) ∩ Γν (q) ou nomear o
sistema de equações na forma
η1 x + η2 y + η3 z + k1 = 0
.
s:
ν1 x + ν2 y + ν3 z + k2 = 0
Quando os dois planos passam pela origem obtemos equações lineares homogêneas,
k1 = k2 = 0. Nesse caso, s é um subespaço vetorial de R3 e todo vetor de s escreve-se
como múltiplo do vetor η × ν.
2
Exercı́cios propostos 7.3
1. Calcule uma equação para o plano contendo os pontos a, b e c do R3 quando:
a) a = (1, −2, 1), b = (1, −1, 2) e c = (0, −2, −1);
b) a = (1, 1, 1),
b = (2, 2, 2)
e c = (−1, −1, −1).
2. Determine uma equação para o plano Γη paralelo à Γη (p) quando η = (3, −1, 2) e
p = (1, 1, 1).
3. Mostre que dois segmentos [p, q] e [m, n] em R3 são congruentes, se e somente se,
d(p, q) = d(m, n).
4. Mostre que os segmentos [p, q] e [m, n]
a) p = (1, −1, 1), q = (0, 1, 1),
b) p = (2, 1, −1), q = (1, 0, 1),
c) p = (2, −5, 3), q = (1, −4, 2),
do R3 são congruentes quando:
m = (−1, 0, 1) e n = (1, 1, 1);
m = (2, 2, 0)
e n = (1, 1, 2);
m = (2, 0, 1)
e n = (1, 1, 0).
5. Sejam p um ponto e s uma reta em R3 . Se v, w ∈ s, mostre que a distância de p a s
é dada por
d(p, s) =
(w−v)×(p−v)
.
w−v
6. Mostre que a distância de um ponto q ∈ Rn ao hiperplano Γη (p) é calculada por
d(q, Γη (p)) =
|q−p,η|
.
η
64
CAPÍTULO 7. GEOMETRIA EUCLIDIANA
7. Considere o vetor η = (1, 1, 1) e o ponto p = (1, 2, 1) em R3 . Calcule a distância de
q = (3, 0, −1) ao plano Γη (p).
√
8. Mostre que o plano Γη (p) : x + z = 2 é tangente à esfera S2 (c) = {(x, y, z) ∈
R3 ; x2 + z 2 = 2y − y 2 }.
9. Dado um hiperplano Γη (p) = {v ∈ Rn : v − p, η = 0} e um ponto q ∈
/ Γη (p) defina
o simétrico de q em relação a Γη (p) como sendo o ponto q tal que d(q , Γη (p)) =
d(q, Γη (p)). Prove que
q = q − 2 q−p,η
η.
η,η
10. Considere o vetor η = (1, 0, 1) e o ponto p = (1, 2, 1) em R3 . Determine o ponto
simétrico de q = (3, 0, −5) em relação ao plano Γη (p).
Parte IV
GEOMETRIA ELÍPTICA
(dupla)
Capı́tulo 8
Geometria Elı́ptica
A esfera unitária canônica S2 será um modelo para o ”plano” de uma geometria
chamada Geometria Elı́ptica.
O sistema agora considerado omite o grupo de ordem do sistema axiomático
para a Geometria Euclidiana fixado por Hilbert. Como não existe uma ordem não
podemos definir segmentos de retas do mesmo modo pois um segmento de reta
Euclidiana é um subconjunto de uma reta definido a partir da ordem.
Mas mesmo assim, no modelo para a Geometria Elı́ptica podemos definir o
conceito de segmento, agora de outra forma. Ao falarmos num segmento de reta
elı́ptico com extremos A e B, é necessário ser mais preciso indicando qual seria
seu ”interior” pois as retas elı́pticas são grandes cı́rculos da esfera S2 e dois pontos
distintos de um cı́rculo define dois segmentos de cı́rculo. Feito isso, ao realizarmos
o termo indefinido congruência podemos verificar todos os axiomas deste grupo.
Uma pequena modificação se faz necessária no axioma 1. do grupo de congruência.
Como não existe ordem deve-se omitir a expressão ... um dado lado da reta.
No axioma das paralelas, postula-se que sempre ocorre interseção entre quaisquer duas retas e a interseção é dupla, daı́ o nome Geometria elı́ptica dupla. A
região que no plano Euclidiano é denominada ângulo terá como correspondente na
Geometria Elı́ptica uma região classicamente denominada lua. No momento apropriado descreveremos tal região.
Axiomas da Geometria Elı́ptica
I Termos indefinidos
1. Ponto, reta, plano, pertence e congruência.
II Axiomas de incidência
1. Para cada dois pontos distintos existe uma reta que os contém.
2. Toda reta contém pelo menos dois pontos.
8.1. DISTÂNCIA ESFÉRICA
67
3. Existe pelo menos três pontos que não estão sobre uma mesma
reta e todos os pontos estão sobre o mesmo plano.
IV Axiomas de Congruência
V Axioma das Paralelas
1. Seja l uma reta e A um ponto não em l. Então toda reta que
passa por A intercepta l.
VI Axiomas de Continuidade
1. Existe uma correspondência biunı́voca entre os números reais
e os pontos de uma reta menos um dos seus pontos.
8.1
Distância esférica
Estamos interessados em estudar a geometria da esfera unitária canônica em R3 ,
mais precisamente em estudar o conjunto
S2 = {v ∈ R3 ; v = 1}
equipado com uma função distância. Para medir a distância entre pontos, utilizaremos o conceito de ângulo entre dois vetores. Dados u, v ∈ S2 . Seja θ(u, v) ∈
[0, π] a medida do ângulo entre os vetores unitário u e v. Recordamos que este
ângulo foi definido utilizando a desigualdade de
Cauchy-Schwarz. Por definição,
cosθ(u, v) =
u, v
.
u v
Do fato de u e v serem unitários temos que
cosθ(u, v) = u, v,
sen θ(u, v) = u × v.
Chamaremos de distância em S2 a aplicação
d : S2 × S2 → R,
d(u, v) = θ(u, v).
Exercı́cio 8.1.1 Demonstre os seguintes fatos sobre esta aplicação:
a) 0 ≤ d(u, v) ≤ π;
b) d(u, v) = π se, e somente se v = −u.
2
68
CAPÍTULO 8. GEOMETRIA ELÍPTICA
Proposição 8.1.1 A função d, acima definida, é uma função distância em S2 .
Prova Aconselhamos ao leitor rever a definição de função distância. As propriedades positiva definida e simétrica têm uma verificação simples e serão deixadas como
exercı́cios. Mostremos a desigualdade triangular. Dados três pontos u, v, w ∈ S2 ,
por definição de distância esférica temos as igualdades
θ(u, v) = d(u, v),
θ(v, w) = d(v, w),
θ(u, w) = d(u, w).
Portanto, a desigualdade que desejamos demonstrar é
θ(u, w) ≤ θ(u, v) + θ(v, w),
cuja demonstração será dividida em dois casos.
1o caso: Vale a desigualdade π ≤ θ(u, v) + θ(v, w): neste caso, θ(u, v) ≤ π ≤
θ(u, v) + θ(v, w).
2o caso: Vale a desigualdade θ(u, v)+θ(v, w) ≤ π: como a função cos : [0, π] → R
é decrescente, demonstrar a desigualdade triangular é equivalente a demonstrar a
desigualdade
cos(θ(u, v) + θ(v, w)) ≤ cosθ(u, w).
Para isto, utilizaremos uma identidade trigonométrica para o cosseno da soma de
ângulos e algumas identidades envolvendo produto interno e produto vetorial. Lembrando que consideramos apenas vetores unitários, temos as igualdades
cos (θ(u, v) + θ(v, w)) = cos θ(u, v)cos θ(v, w) − sen θ(u, v)sen θ(v, w)
= u, v v, w − u × v · v × w.
Agora, a desigualdade de Cauchy-Schwarz garante que
−u × v, v × w ≥ −u × v v × w,
e a fórmula de Lagrange nos permiter escrever
u × v, v × w = u, vv, w − u, wv, v.
De v, v = 1 obtemos então as desigualdades
cos (θ(u, v) + θ(v, w)) ≤ u, v v, w − u × v, v × w
= u, vv, w − (u, vv, w − u, wv, v)
= u, w
= cosθ(u, w).
Isto termina a demonstração da proposição.
Exercı́cios propostos 8.1
2
8.2. PLANO ELÍPTICO
69
1. Dados os pontos u, v ∈ S2 , considere as distâncias d(u, v), d(u, −v), d(−u, v) e
d(−u, −v). Quais delas são iguais?
2. Três pontos u, v, w da esfera unitária S2 são ditos colineares se existe um grande
cı́rculo S2 contendo estes pontos. Prove que u, v, w são colineares se, e somente se,
θ(u, v) ± θ(v, w) = θ(u, w).
8.2
Plano elı́ptico
Grandes cı́rculos da esfera unitária são equivalentes às retas da Geometria Euclidiana, no seguinte sentido: como sabemos, a menor distância percorrida para irmos
de um ponto a outro de um plano é obtida sobre uma trajetória que descreve um
segmento de reta definida pelos pontos. Em S2 , a menor distância percorrida para
irmos de um ponto a outro é obtida sobre uma trajetória que descreve um grande
cı́rculo definido pelos dois pontos. Não mostraremos este fato.
Chamaremos S2 de plano (elı́ptico) e seus elementos de pontos
(elı́pticos).
Um plano Γ ⊂ R3 que contém a origem o é determinado pelo seu vetor normal
η = (η1 , η2 , η3 ), que é um vetor não nulo. A equação linear do plano fica sendo
Γ : η1 x + η2 y + η3 z = 0.
Como sabemos Γ é um subespaço vetorial de R3 de dimensão dois. Para destacar o
vetor normal denotamos Γ por Γη :
Γη é o único plano de R3 contendo a origem cujo vetor normal é η = (η1 , η2 , η3 ).
Exemplo 8.2.1 Se η = (13, −1, 40) ∈ R3 , o plano que contém a origem e tem η
como vetor normal é o conjunto formado por todos os vetores v = (x, y, z) ∈ R3
cujas coordenadas satisfazem a equação Γη : 13x − y + 40z = 0.
2
Um grande cı́rculo em S2 será chamado de reta (elı́ptica).
Em outras palavras, diz-se que um subconjunto r ⊂ S2 é uma reta elı́ptica se
r = S2 ∩ Γη . Para destacar que a reta elı́ptica r é obtida pela interseção do plano
Γη que contém cujo vetor normal é η utilizamos a notação
rη = S2 ∩ Γη .
Portanto, uma reta elı́ptica é o subconjunto do plano elı́ptico formado pelos pontos
(x, y, z) ∈ R3 satisfazendo as equações
2
x + y2 + z2 = 1
.
rη :
η1 x + η2 y + η3 z = 0
70
CAPÍTULO 8. GEOMETRIA ELÍPTICA
Já temos em mãos :
um conjunto S2 que denominado de plano ”elı́ptico”;
elementos deste conjunto, chamados pontos;
subconjuntos rη , chamados de retas ”elı́pticas”(grandes cı́rculos);
entendemos o conceito de um ponto pertencer a uma reta (incidência).
Estamos preparados para verificar o grupo de axiomas de incidência da Geometria Elı́ptica. Os dois últimos axiomas são verificados trivialmente. Antes de
verificarmos o primeiro, estabeleçamos um critério para determinar se um grande
cı́rculo incide sobre um ponto. Dizer que um ponto v ∈ S2 e uma reta elı́ptica
rη ⊂ S2 são incidentes é equivalente a dizer que v ∈ rη . Continuaremos a denotar o
produto interno canônico do R3 por , .
Proposição 8.2.1 (Condição de incidência) Dados um ponto v ∈ S2 e um grande cı́rculo rη ⊂ S2 . Temos:
v e rη são incidentes se, e somente se, v, η = 0.
Prova Escrevamos rη = Γη ∩ S2 e seja v ∈ S2 . Temos que v ∈ rη se, e somente se,
2
v ∈ Γη ou, equivalentemente, se, e somente se, v, η = 0.
Dois pontos distintos determinam uma reta
Verifiquemos este axioma. Sejam u, v ∈ S2 distintos. O produto vetorial η =
u × v não é o vetor nulo se, e somente se, u = −v. Se este for o caso, consideramos
o plano Γη e a reta elı́ptica correspondente rη = Γη ∩ S2 . Como u, η = 0 = v, η,
pelo critério de incidência os pontos u e v pertencem à reta rη , ou seja, u e v
determinam a reta rη . Observe que a reta é única pois só existe um plano contendo
u, v e a origem.
Agora, quando u = −v, consideramos um vetor qualquer η ∈ R3 tal que u, η =
0. Como u = −v, segue que v, η = 0. Portanto, pela condição de incidência,
u, v ∈ rη . Neste caso, u e v não determinam uma única reta, pois existem infinitos
planos contendo u, o e v = −u, desde que os três pontos são colineares em R3 . 2
No plano elı́ptico não existe paralelismo nem possui a propriedade da interseção
única entre duas retas. Isto decorre da seguinte propriedade que deixamos como
exercı́cio.
Exercı́cio 8.2.1 Mostre que se Γη e Γν são dois planos distintos do R3 contendo
a origem então a interseção dos planos é uma reta (Euclidiana) do R3 contendo a
origem e formada pelos múltiplos do vetor u = η × ν.
2
8.2. PLANO ELÍPTICO
71
Proposição 8.2.2 (Concorrência de duas retas) Duas retas elı́pticas distintas,
digamos, rη e rν , sempre se interceptam. Mais ainda, a interseção ocorre em dois
pontos, a saber,
u1 =
1
η×ν η
×ν
e
1
u2 = − η×ν
η × ν.
Prova Seguindo a notação temos que
rη = Γ η ∩ S 2
e
rν = Γν ∩ S2 .
Portanto, a interseção de rη e rν é o conjunto
rη ∩ rν = Γη ∩ Γν ∩ S2 .
Como Γη ∩ Γν = {λ η × ν; λ ∈ R}, os únicos vetores unitários são os pontos citados
no enunciado.
2.
Diz-se que três pontos u, v, w ∈ S2 são colineares se existe uma reta incidindo
nos pontos. Também existe um critério simples para determinar quando três pontos
são colineares.
Proposição 8.2.3 (Equação de colinearidade para três pontos) Dados três
pontos u, v, w ∈ S2 . Temos:
u,v,w são colineares se, e somente se
det[u, v, w] = 0.
Prova Sejam u, v, w ∈ S2 três pontos. Quando não são distintos ou quando v = −w,
a demonstração é trivial. Vamos assumir então que eles são distintos e que v = −w.
Por definição, os pontos são colineares se, e somente se, eles pertencem a uma
mesma reta elı́ptica, digamos rη = Γη ∩ S2 , onde η é algum vetor normal ao plano.
Escolheremos η = v × w. Mas isto é equivalente a dizer que eles são colineares no
plano elı́ptico S2 se, e somente se, u, v e w pertencem ao plano Γη , ou seja, se e
somente se,
u, η = v, η = w, η = 0.
Portanto, eles são, colineares em S2 se, e somente se,
0 = u, η = det[u, v, w].
2
Proposição 8.2.4 (Equação de concorrência para três retas) Dados três retas elı́pticas, digamos rη , rµ e rν . Temos:
rη , rµ e rν são concorrentes se, e somente se, det[η, µ, ν] = 0.
A prova desta proposição e o axioma de continuidade ficarão como exercı́cio.
72
CAPÍTULO 8. GEOMETRIA ELÍPTICA
Existe uma correspondência biunı́voca entre os números reais e
os pontos de uma reta elı́ptica menos um dos seus pontos.
Exercı́cios propostos 8.2
1. Verifique se os pontos elı́pticos m, p e q são colineares e, caso sejam, determine a reta
elı́ptica rη que os contém.
√
8.3
√
√
√
√
a)
m = (1, 0, 0),
p = ( √15 , √25 , √25 ),
2 √7 √2
q = ( √11
, 11 , 11 );
b)
m = ( √13 , √13 , √13 ),
p = (− √13 , √13 , √13 ),
q = (0, √12 , √12 ).
Retas elı́pticas orientadas
A notação Γη também sinalizará que o plano está orientado pelo vetor normal η.
Ao dizermos ”o plano está orientado pelo o vetor normal η” tentamos transmitir a
infomação fı́sica que o lado de ”cima” do plano é o lado para o qual o vetor η está
apontando. Mais precisamente, um vetor v está no semi-espaço positivo definido
pelo plano Γη se v, η ≥ 0. Se este produto interno for não-positivo, diremos que
o vetor v está no semi-espaço negativo. É claro, v pertence ao plano quando o
produto interno acima for zero.
Exercı́cio 8.3.1 Para fixar os conceitos, mostre as afirmações.
1. Se λ > 0 então Γη = Γλη como conjuntos e são iguais como planos orientados.
2. Se λ < 0 então Γη = Γλη como conjuntos e são distintos como planos orientados.
2
Pelo visto, para determinar um plano orientado contendo a origem precisamos
apenas de um vetor unitário η ∈ S2 . Tal plano será Γη . Se escolhermos o vetor
antı́poda, −η ∈ S2 , o plano Γ−η será, como conjunto, igual ao anterior, mas como
plano orientado será diferente. Dois vetores unitários e simétricos esgotam todas as
possibilidades de orientação de planos.
Também o ı́ndice η utilizado para denotarmos
uma reta elı́ptica, rη , informará um pouco mais,
a reta é uma reta orientada. Não nos deteremos descrevendo tecnicidades sobre orientação
de cı́rculo, entretanto, a idéia tem um significado fı́sico preciso, ela procura transmitir que o
percurso de uma pessoa (sobre o plano orientado
8.4. PLANO ELÍPTICO DUAL
73
Γη contendo rη ) é positivo se a pessoa, posicionada como o vetor normal η, ao andar
sobre esta reta deixa o disco do plano que ela delimita à sua esquerda. Observamos
que rη e r−η são iguais como conjuntos, mas as orientações são opostas.
Formalizemos as idéias acima. Para cada ponto p ∈ rη , consideramos o vetor
φη (p) = η × p. Observe que φη (p) é um vetor tangente ao grande cı́rculo rη no ponto
p e, fisicamente, descreve a velocidade de um movimento de uma pessoa fazendo o
percurso positivo sobre o grande cı́rculo.
Exercı́cio 8.3.2 Para fixar os conceitos, mostre as afirmações.
1. Se λ > 0 então rη = rλη e as orientações são iguais.
2. Se λ < 0 então rη = rλη e as orientações são opostas.
3. Conclua que cada ponto η ∈ S2 determina um único cı́rculo orientado.
2
Resumindo, para descrever uma reta elı́ptica precisamos apenas de um vetor
unitário η ∈ S2 . Tal grande cı́rculo orientado será rη . Se escolhermos o vetor
antı́poda −η ∈ S2 a reta elı́ptica r−η será a mesma, como conjunto, mas como reta
elı́ptica orientada será diferente.
8.4
Plano elı́ptico dual
No que segue iremos examinar conjuntos cujos elementos são subconjuntos de um
conjunto dado. O leitor já tomou contato com este fato em algum momento da vida
de estudante. Dado um conjunto A denota-se por P(A) o conjunto das partes de A,
isto é, o conjunto formado por todos os subconjuntos de A. Por definição de P(A),
podemos escrever uma afirmação notacionalmente estranha mas verdadeira,
C ⊂ A se, e somente se, C ∈ P(A).
Pense nesta sentença. O fato de considerar um subconjunto como um elemento
(”ponto”) de um outro conjunto será explorado com o objetivo de construir novos
espaços a partir de outros. Abaixo segue a primeira das construções.
Iremos considerar um conjunto formado por subconjuntos, a saber,
R é o conjunto formado pelas retas elı́pticas orientadas.
Para construir um modelo geométrico para R precisamos fazer uma abstração, considerando cada reta elı́ptica como um ”ponto” do conjunto R. O principal ingrediente
da construção já foi apresentado na seção anterior, qual seja,
cada ponto η ∈ S2 determina uma única reta elı́ptica orientada rη e
cada reta orientada rη determina um único ponto no plano elı́ptico η ∈ S2 .
74
CAPÍTULO 8. GEOMETRIA ELÍPTICA
Estes comentários nos permitem reescrever o conjunto R como
R = {rη ; η ∈ S2 }.
Ademais, podemos estabelecer a seguinte correspondência biunı́voca entre os elementos de R (retas elı́pticas orientadas) e os elementos de S2 :
rη ←→ η.
Isto mostra que existem tantas retas elı́pticas orientadas quantos pontos elı́pticos!
Sendo assim, consideramos como modelo geométrico para R o próprio conjunto S2 .
Com isto surge um problema notacional, qual seja, distinguir o registro de uma
reta elı́ptica orientada de um ponto na esfera. Como primeira providência para que
a confusão não ocorra, o conjunto das retas elı́pticas orientadas será indicado por
S2∗ e denominado de plano elı́ptico dual ou esfera dual. A segunda providência é
designar os elementos de S2∗ pelas letras gregas minúsculas η, µ, ν, etc. em lugar
de rη , rµ , rν , etc. Assim
rη ⊂ S2
⇔
η ∈ R = S2∗ .
No conjuto S2∗ consideramos a mesma métrica já definida na esfera, ou seja,
d : S2 × S2 → R, d(η, ν) = θ(η, ν).
8.5
Isometrias de S2
Realizamos a idéia de congruência utilizando o conceito de isometria.
Uma isometria em S2 é uma aplicação U : S2 → S2
que preserva distância, ou seja, θ(U (v), U (w)) =
θ(u, v) para quaisquer pontos u, v ∈ S2 .
O próximo teorema é creditado ao matemático
suiço Leonhard Euler (1707/83). Para acompanhar
a demonstração o leitor não pode ter omitido a leitura do capı́tulo Isometrias de Rn .
Teorema 8.5.1 (Classificação de isometrias em S2 ) Uma aplicação U0 : S2 →
S2 é uma isometria se, e somente se, U0 for a restrição de um operador ortogonal
U : R3 → R3 .
Prova Seja U : R3 → R3 um operador ortogonal. Como U preserva norma de
vetores, desde que
U (u)2 = U (u), U (u) = u, u = u2 ,
8.6. CONGRUÊNCIA
75
sua restrição U0 : S2 → S2 , U0 (v) = U (v), está bem definida. Mostremos que U0
preserva distâncias na esfera. Dados os vetores unitários u, v ∈ S2 ,
θ(U0 (u), U0 (v)) = U (u), U (v) = u, v = θ(u, v).
Portanto, a restrição de um operador ortogonal do R3 define uma isometria de S2 .
A recı́proca deixaremos como exercı́cio sugerindo o seguinte roteiro. Dada uma
isometria U0 : S2 → S2 , defina a aplicação U : R3 → R3 , por
v
vU0 ( v ) se v = o
.
U (v) =
o
se v = o
Mostre que U está bem definida, que é um operador ortogonal e que a restrição à
2
esfera é a isometria U0 .
Exercı́cios propostos 8.3
1. Mostre as afirmações.
(a) Toda isometria U de S2 é biunı́voca.
(b) A inversa de uma isometria do plano elı́ptico é uma isometria.
(c) Se U é uma isometria do plano elı́ptico então U ou −U tem dois pontos fixos.
(d) O conjunto das isometrias do plano elı́ptico equipado com a operação de composição de funções é um grupo.
(e) Uma isometria de S2 deixa invariante alguma reta elı́ptica.
(f) U : S2 → S2 , U (x, y, z) = (z, x, y) é uma isometria e determine uma reta elı́ptica
invariante por U .
8.6
Congruência
Como comentado na introdução do capı́tulo, ao nos referir a um segmento da reta
elı́ptica rη com extremos u, v ∈ rη devemos precisar qual dos dois arcos de cı́rculos
estamos considerando. Para isto basta citar um terceiro ponto que esteja no arco
considerado.
Dois segmentos são congruentes se existe uma isometria de S2 que
aplica biunivocamente um segmento no outro.
O leitor verificará que os três primeiros axiomas do grupo de congruência são
válidos neste modelo elı́ptico. Os outros dois axiomas dizem respeito a ângulos,
conceito que passaremos a precisar.
76
CAPÍTULO 8. GEOMETRIA ELÍPTICA
Na Geometria Euclidiana plana a interseção de
dois semiplanos positivos determina uma região
chamada ângulo. Iremos seguir aquela mesma
contrução, agora no plano elı́ptico. É conveniente considerar retas elı́pticas orientadas para
conseguirmos nomear precisamente de qual dos
dois semiplanos estamos nos referindo. O semiplano positivo Hη definido pela reta elı́ptica orientada rη é o hemisfério formado pelos pontos
u ∈ S2 tais que u, η ≥ 0. O semiplano negativo
é o hemisfério formado por aqueles pontos u ∈ S2
tais que u, η ≤ 0.
Repetindo uma idéia fı́sica já citada diversas vezes, o semiplano positivo está à
esquerda de um movimento cuja trajetória é a reta elı́ptica orientada.
Um ângulo ou uma lua no plano elı́ptico S2 , determinado por duas retas elı́pticas
distintas e orientadas, digamos rη e rµ , é o conjunto Lηµ obtido pela interseção dos
semiplanos positivos determinados por elas, a saber,
Lηµ = Hη ∩ Hµ .
Os vértices da lua Lµν são os pontos
u=
1
µ × ν,
µ × ν
−u = −
1
µ × ν.
µ × ν
A medida de um ângulo ou a medida de uma
lua Lµν é definida como sendo θ(µ, −ν). Feito
isto, seguem as mesmas terminologias: ângulos
agudos, obtusos, suplentares, complementares,
retos, opostos pelos vértices, etc.
Duas luas (ângulos) são congruentes se existe uma isometria de
2
S que aplica biunivocamente uma lua na outra.
Antes de finalizar, definiremos triângulo elı́ptico. Sejam u, v, w ∈ S2 três pontos
tais que o conjunto ordenado {u, v, w} seja uma base ordenada positiva de R3 .
Como sabemos, afirmar que uma base ordenada é positiva corresponde a afirmar
que det[u, v, w] > 0. Tais pontos serão os vértices do triângulo elı́ptico. Os lados
do triângulos serão arcos das retas elı́pticas rη , rµ e rν , onde
η = u × v,
µ = v × w,
ν = w × u.
Ressaltamos a ordem cı́clica dos pontos, u → v, v → w e w → u. As demonstrações
futuras levarão em conta tal fato.
8.6. CONGRUÊNCIA
77
Definição 8.6.1 Sejam u, v, w ∈ S2 . Um subconjunto ∆uvw ⊂ S2 é um triângulo (elı́poto)
quando
1. {u, v, w} é base ordenada positiva de R3 ;
2. ∆uvw = Hη ∩ Hµ ∩ Hν .
Observe que os lados de um triângulo elı́ptico são
segmentos de retas elı́ptica orientadas.
Dois triângulos elı́pticos são congruentes se existe uma isometria
que aplica biunivocamente um triângulo sobre o outro.
Uma reta elı́ptica menos um dos seus pontos é um modelo de uma
reta Euclidiana.
Exercı́cios propostos 8.4
1. Mostre as afirmações.
(a) Ângulos opostos pelo vértice têm a mesma medida.
(b) Ângulos opostos pelos vértices são côngruos.
(c) A medida da Lua Lηµ é π − θ(η, µ).
(d) Se as medidas de duas luas são iguais então elas são congruentes.
(e) Semi-planos, ângulos e triângulos elı́pticos são conjuntos convexos.
2. Calcule a medida do ângulo das luas orientados Le1 e2 e Le1 e3 .
3. Quais dos ternos ordenados {u, v, w} determinam um triângulo ∆uvw ⊂ S2 .
w = ( √13 , √13 , √13 ).
a) u = (1, 0, 0),
v = ( √12 , √12 , 0),
b)
u = ( √13 , √13 , √13 ),
v = ( √114 , √314 , √214 ),
w = ( √535 , √135 , √335 ).
4. Verifique que o triângulo com vértices u1 = e1 , v1 = e2 e w1 = ( √12 , √12 , 0), nesta
−1
, 0).
ordem, é côngruo ao triângulo com vértices u2 = e2 , v2 = e3 e w2 = ( √12 , √
2
5. Verifique que isometria de triângulos elı́pticos é uma relação de eqüivalência no conjunto formado por todos os triângulos elı́pticos.
6. Se ∆uvw é um triângulo elı́ptico, mostre que os triângulos obtidos pelas permutações
cı́clicas dos ı́ndices, ∆wuv e ∆vwu , também são triângulos elı́pticos. Mais ainda, como
conjuntos os três são iguais.
Capı́tulo 9
Trigonometria elı́ptica
Embora o leitor esteja familiarizado com a teoria de triângulos no plano Euclidiano recordaremos alguns resultados de trigonometria plana com a finalidade de
relacioná-los de modo natural com os tópicos das próximas seções. Dados três pontos não colineares do plano Euclidiano, digamos A, B e C, podemos construir um
triângulo com vértices nestes pontos, triângulo que denotaremos por ∆ABC . Usualmente nomeamos por α, β e γ as medidas dos ângulos cujos vértices são A, B e
C, e as medidas dos lados opostos aos vértices por a, b e c, respectivamente. Certamente o leitor recorda de duas ”leis” demonstradas ao estudarmos Trigonometria
no Ensino Médio. Elas dizem que num triângulo ∆ABC valem as igualdades
sen β
sen γ
sen α
=
=
,
c2 = a2 + b2 − 2ab cos γ.
a
b
c
Estas são a Lei dos senos e a Lei dos cossenos,
respectivamente. A Lei dos cossenos na Geometria Euclidiana é uma generalização do Teorema
de Pitágoras (a qual se reduz quando γ = π2 ).
Observamos ainda que o valor cos γ é dado pelas
medidas dos lados:
a2 + b2 − c2
.
2ab
Decorre da axiomatização da Geometria Euclidiana que a soma das medidas dos
ângulos de um triângulo é igual a π. O objetivo principal do capı́tulo é mostrar que
a soma das medidas dos ângulos de um triângulo elı́ptico é maior que π. Demonstraremos também leis equivalentes para triângulos elı́pticos bem como fórmulas para
o cálculo de áreas de triângulos.
cos γ =
9.1. LEI DOS SENOS
9.1
79
Lei dos senos
No capı́tulo anterior definimos triângulo elı́ptico para estabelecer os axiomas de congruência. É conveniente fixar uma série de dados de um triângulo elı́ptico seguindo
de perto a notação Euclidiana para estudar a trigonometria elı́ptica.
1. Vértice u
• O lado oposto ao vértice u está contido em
rµ , onde µ = v × w.
• A medida do ângulo com vértice u é α =
π − θ(ν, η).
• A medida do lado oposto ao vértice u é
a = θ(v, w).
2. Vértice v
• O lado oposto ao vértice v está contido em
rν , onde ν = w × u.
• A medida do ângulo com vértice v é β =
π − θ(η, µ).
• A medida do lado oposto ao vértice v é
b = θ(w, u).
3. Vértice w
• O lado oposto ao vértice w está contido em rη , onde η = u × v.
• A medida do ângulo com vértice w é γ = π − θ(µ, ν).
• A medida do lado oposto ao vértice w é c = θ(u, v).
Desejamos demonstrar as seguintes igualdades envolvendo os valores acima,
sen α sen b sen c = sen a sen β sen c = sen a sen b sen γ.
Lema 9.1.1 Com a notação fixada temos as relações
η × µ = ν, vv,
µ × ν = η, ww,
ν × η = µ, uu.
Como conseqüência, valem as igualdades das normas
η × µ = µ × ν = ν × η.
Prova Recordando o produto vetorial duplo, podemos escrever
ν × η = (w × u) × (u × v)
= w, u × vu − u, u × vw
= w, u × vu
= w, ηu.
80
CAPÍTULO 9. TRIGONOMETRIA ELÍPTICA
A terceira igualdade decorre de u ⊥ (u × w). Para completar a demonstração
apelamos para a Identidade Cı́clica e para a simetria do produto interno,
w, η = w, u × v = u, v × w = v × w, u = µ, u.
Nas demonstrações das outras duas igualdades utilizamos os mesmos argumentos.
Observando que um outro modo de escrever a Identidade Cı́clica é
µ, u = η, w = ν, v,
podemos terminar a demonstração da última parte do lema, bastando lembrar que
os vetores u, v e w são unitários.
2
Na demonstração do próximo resultado utilizaremos a igualdade u × v =
sen θ(u, v) válida para u e v unitários. Além desta informação, lançaremos mão da
propriedade trigonométrica sen(π − θ) = sen θ.
Proposição 9.1.1 Seja ∆uvw um triângulo elı́ptico. Se a, b e c são as medidas
dos lados opostos aos vértices u, v e w, respectivamente e α, β e γ os ângulos com
vétices em u, v e w, respectivamente, então
sen α sen b sen c = sen a sen β sen c = sen a sen b sen γ.
Prova Pelo lema anterior podemos escrever
ν × η
=
=
=
ν ηsen θ (ν, η)
sen b sen c sen (π − α)
sen b sen c sen α.
De modo semelhante, obtemos as igualdades
ν × η = sen a sen c senβ,
µ × ν = sen a sen b sen γ.
Mas como as normas calculadas são iguais, como visto no último lema, podemos
concluir as igualdades desejadas.
2
Finalmente podemos mostrar o
Teorema 9.1.1 (Lei dos senos e Lei dos cossenos) Seja ∆uvw um triângulo elı́ptico. Se as medidas dos lados opostos aos vértices u, v e w são respectivamente,
a, b e c e as medidas dos ângulos com vértices u, v e w são, respectivamente, α, β
e γ, então
sen β
sen γ
sen α
=
=
,
sen a
sen b
sen c
cos γ =
cos c − cos a cos b
.
sen a sen b
Prova Já vimos que sen α sen b sen c = sen a sen β sen c. Como o triângulo considerado é não degenerado, nenhuma parcela é zero. Simplificando o fator comum,
sen c obtemos sen α sen b = sen a sen β. Agora, segue imediatamente que
9.2. ÁREA DE TRIÂNGULOS
81
sen α
sen β
=
.
sen a
sen b
As outras igualdades têm demonstrações semelhantes.
Para a Lei dos cossenos, por um lado, a Identidade de Lagrange nos diz que
µ, ν = (v × w), (w × u)
v, w v, u
= det
w, w w, u
cos a cos c
= det
1
cos b
= cos a cos b − cos c.
Por outro lado, o produto interno nos dá a igualdade
µ, ν = µ ν cos θ(µ, ν) = sen a sen b cos(π − γ) = −sen a sen b cos γ.
Agora, é imediato a conclusão do teorema.
2
Exercı́cios propostos 9.1
1. Sejam α, β e γ os ângulos de um triângulo elı́ptico cujos lados opostos medem respectivamente a, b e c. Prove que as identidades trigonométricas.
a) cos a = cos bcos c + sen b sen c cos α.
b) cos b = cos a cos c + sen a sen c cos β.
c) cos c = cos acos b + sen a sen b cos γ.
d) cos α = −cos β cos γ + sen β sen γ cos a.
e) cos β = −cos α cos γ + sen α sen γ cos b.
f) cos γ = −cos α cos β + sen α senβ cos c.
2. Sejam α, β e π2 os ângulos de um triângulo elı́ptico cujos lados opostos medem respectivamente a, b e c. Verifique as identidades trigonométricas.
a) cos c = cos a cos b.
b) cos c = cotg α cotg β. c) sen a = sen c sen α.
d) sen b = sen c sen β. e) cos α = tg b cotg c.
f) cos β = tg a cotg c.
g) sen a = tg b cotg β.
h) sen b = tg a cotg α.
i) cos α = cos a sen β.
9.2
Área de triângulos
Num triângulo do plano Euclidiano ∆, cujas medidas dos ângulos internos são α, β
e γ, vale a igualdade α + β + γ = π. Isto não ocorre com triângulos elı́pticos. Num
triângulo elı́ptico ∆uvw ⊂ S2 , com medidas dos ângulos internos α, β e γ ocorre uma
desigualdade, qual seja, α+β+γ > π. Para demonstrá-la precisaremos apenas saber
82
CAPÍTULO 9. TRIGONOMETRIA ELÍPTICA
calcular áreas de regiões da esfera unitária. Na verdade, apenas precisaremos saber
calcular áreas de dois tipos de regiões: toda a esfera e luas da esfera.
Arquimedes considerava seu mais belo teorema
aquele que estabelece a igualdade entre a medida
da área de uma esfera e a medida da área lateral
de um cilindro circunscrito a ela,
A = 4πr 2 .
Ele e seus contemporâneos consideraram um resultado tão fascinante que inscreveram na lápide de Arquimedes a figura que ilustra o teorema.
Este resultado admite uma generalização. Sejam
L a superfı́cie lateral do cilindro circunscrito à
esfera e f : L → S2 , a aplicação que a cada
p ∈ L associa ao ponto f (p) ∈ S2 obtido pela
interseção da esfera com o segmento tendo como
ponto inicial o ponto p e perpendicular eixo do
cilindro circunscrito. A propriedade excepcional
da aplicação f é que ela preserva áreas, no sentido que uma região R ⊂ L com medida de área
m é aplicada sobre uma região f (R) da esfera
com a mesma medida m de área.
É com tal projeção que os cartógrafos constróem o mapa mundi, colocando
como eixo de simetria a reta contendo os polos norte e sul da terra. O resultado de
Arquimedes é obtido aplicando toda a região L, cuja imagem é a esfera.
Sendo assim, uma lua na esfera
unitária, com ângulo α, é obtida
pela projeção por f de uma faixa
com altura 2 e largura α. Como a
área da faixa é 2α, a área da lua
também será 2α.
Teorema 9.2.1 (Teorema de Girard) Seja ∆uvw um triângulo elı́ptico. Se as
medidas dos ângulos determinados pelos vértices u, v e w são, respectivamente, α,
β e γ, então
Área(∆uvw ) = α + β + γ − π.
Como conseqüência, as medidas dos ângulos do triângulo elı́ptico satisfazem a desigualdade α + β + γ > π.
Prova Seguindo a notação fixada, as luas Lνη , Lηµ e Lµν , têm medidas de áreas 2α,
9.2. ÁREA DE TRIÂNGULOS
83
2β e 2γ, respectivamente. Para cada uma delas, consideremos a lua simétrica em
relação à origem, cuja notação será a mesma acrescida do ı́ndice − . Por exemplo,
L−
ηµ = {−v; v ∈ Lηµ }. É claro que as áreas de duas luas simétricas são iguais. Com
isto, podemos afirmar que a esfera é descrita como a união de seis luas,
−
−
S2 = Lνη ∪ Lηµ ∪ Lµν ∪ L−
νη ∪ Lηµ ∪ Lµν .
A área da esfera não será a soma das áreas daqueles conjuntos, pois se efetuarmos
esta soma a área do triângulo elı́ptico será computada três vezes, bem como a área
de seu simétrico em relação à origem, que possui a mesma área,
∆uvw = Lνη ∩ Lηµ ∩ Lµν
e
−
−
−
∆−
uvw = Lνη ∩ Lηµ ∩ Lµν .
Sendo assim, devemos escrever
Área S2 = 2α + 2β + 2γ + 2α + 2β + 2γ − 2Área (∆uvw ) − 2Área (∆−
uvw ).
Reagrupando os termos chegamos à igualdade
4π = 4(α + β + γ) − 4Área (∆uvw ) ,
e explicitando a área do triângulo obtemos
Área (∆uvw ) = α + β + γ − π.
Portanto, segue a primeira parte do Teorema.
Como a área do triângulo é positiva obtemos a
desigualdade α + β + γ > π.
2
Exercı́cios propostos 9.2
1. Sejam u = (1, 0, 0), v = (0, 1, 0) e w = √12 (0, 1, 1) três pontos de S2 . Verifique que
∆uvw é um triângulo elı́ptico e calcule sua área.
2. Existe um triângulo elı́ptico cujos ângulos sejam α = β = π e γ =
π
4?
3. Prove que um triângulo elı́ptico é eqüiangular se, e somente se, é eqüilátero.
4. Existe um triângulo eqüiangular em S2 cujos ângulos medem
π
3?
5. Sejam u, v ∈ S2 , tais que η = v ×u não é o vetor nulo. Defina a aplicação A : S2 → S2 ,
pela propriedade, A(w) é o simétrico de w em relação ao plano Γη .
a) Mostre que A(w) = w − 2 w,η
η2 η.
b) Conclua que A(w) = w para qualquer w ∈ Γη .
c) Seja ∆uvw um triângulo em S2 . Mostre que ∆uAuv (w)v é um triângulo cuja área
é igual a área de ∆uvw .
84
CAPÍTULO 9. TRIGONOMETRIA ELÍPTICA
6. Sejam v1 , v2 , v3 e v4 vértices de um quadrilátero em S2 . Mostre que a soma das medidas dos ângulos internos deste quadrilátero é igual a 2π mais a área do quadrilátero.
7. Sejam ∆uvw um triângulo em S2 e A : S2 → S2 a aplicação definida por A(p) = −p.
Mostre que A (∆uvw ) é um triângulo cuja área é igual a área de ∆uvw .
9.3
*Triângulo dual
Como sabemos, o plano elı́ptico dual, S2∗ , é um outro exemplo de plano elı́ptico. Utilizaremos esta dualidade para estabelecer outras propriedades de triângulos elı́pticos.
Seja ∆uvw ⊂ S2 um triângulo elı́ptico. Se considerarmos as reta elı́pticas orientadas determinadas pelos vértices como pontos de S2∗ teremos os pontos
u∗ =
µ
,
µ
v∗ =
ν
,
ν
w∗ =
η
.
η
O triângulo elı́ptico dual de ∆uvw é o triângulo ∆u∗ v∗ w∗ ⊂ S2∗ . No que segue,
iremos estabelecer relações entre os dois triângulos. Primeiro, escrevamos os grandes
cı́rculos em S2∗ que contêm os lados do triângulo dual,
η ∗ = u∗ × v ∗ ,
µ∗ = v ∗ × w ∗ ,
ν ∗ = w∗ × u∗ .
Seguindo as convenções notacionais já estabelecidas, sejam
1. a∗ , b∗ e c∗ as medidas dos lados opostos aos vértices u∗ , v ∗ e w∗ , respectivamente, e
2. α∗ , β ∗ e γ ∗ a medida dos ângulos cujos vértices são u∗ , v ∗ e w∗ , respectivamente.
Tais valores são facilmente calculáveis,
a∗ = θ(ν, η) = π − α,
b∗ = θ(η, µ) = π − β,
c∗ = θ(µ, ν) = π − γ.
Isto é, as medidas dos lados do triângulo dual são iguais as medidas dos ângulos do
triângulo original. Agora, as medidas do ângulos do tiângulo dual com vértices nos
lados u∗ , v ∗ e w∗ são
α∗ = π − θ(ν ∗ , η ∗ ),
β ∗ = π − θ(η ∗ , µ∗ ),
γ ∗ = π − θ(µ∗ , ν ∗ ).
Resta identificar o membro direito de cada igualdade. Pelo primeiro lema mostrado
neste capı́tulo, seguem que
ν ∗ × η ∗ = µ∗ , u∗ u∗ ,
η ∗ × µ∗ = ν ∗ , v ∗ v ∗ ,
µ∗ × ν ∗ = η ∗ , w∗ w∗ .
Portanto,
π − α∗ = θ(v, w) = a,
π − β ∗ = θ(u, w) = b,
π − γ ∗ = θ(u, v) = c.
9.3. *TRIÂNGULO DUAL
85
Isto é, as medidas dos ângulos do triângulo dual ∆u∗ v∗ w∗ é a medida dos lados do
triângulo ∆uvw !
Teorema 9.3.1 (Segundas Lei dos senos e Lei dos cossenos na esfera) Seja ∆uvw um triângulo elı́ptico. Se as medidas dos lados opostos aos vértices u, v e
w são respectivamente, a, b e c e as medidas dos ângulos com vértices u, v e w são,
respectivamente, α, β e γ, então
sen b
sen c
cos γ + cos α cos β
sen a
=
=
,
cos c =
.
sen α
sen β
sen γ
sen α sen β
Prova A Segunda Lei dos senos é obtida aplicando a Primeira Lei dos senos para o
triângulo dual. A Segunda Lei dos cossenos também é obtida aplicando a Primeira
Lei dos cossenos para o triângulo dual,
cosc∗ − cos a∗ cos b∗
.
cos γ ∗ =
sen a∗ sen b∗
Fazendo as substituições necessárias,
cos(π − γ) − cos(π − α) cos(π − β)
.
cos(π − c) =
sen (π − α) sen(π − β)
Pelas conhecidas identidades trigonométricas cos(π − t) = −cos t e sen (π − t) =
sen t, concluı́mos a demonstração.
2
Teorema 9.3.2 (Área de um triângulo elı́ptico II) Seja ∆uvw um triângulo elı́ptico. Se as medidas dos lados opostos aos vértices nos pontos u, v e w são,
respectivamente, a, b e c, então
Área(∆uvw ) = 2π − a − b − c.
Como conseqüência, o perı́metro do triângulo elı́ptico satisfaz a desigualdade
2π > a + b + c.
Exercı́cios propostos 9.3
1. Mostre que ∆∗∗ = ∆ para qualquer triângulo ∆ ⊂ S2 .
Parte V
GEOMETRIA PROJETIVA E
GEOMETRIA AFIM
Capı́tulo 10
Geometria Projetiva
Na Geometria Euclidiana postula-se a existência de retas que não se interceptam.
Isto ocorrendo, diz-se que elas são paralelas. Tal postulado contradiz a realidade
que apreendemos visualmente.
Quando estamos numa longa estrada em linha
reta, seus lados são assumidos paralelos, mas
a nossa sensação nos diz que elas concorrem
num ponto muito longe, chamado ponto de fuga.
No ponto de fuga as duas retas estão se interceptando. Se existe uma outra estrada em linha reta, cruzando a primeira, ao olharmos na
direção desta outra, veremos o mesmo fenômeno,
agora, o ponto de fuga é diferente.
Este fenômeno é captado por uma fotografia ou por uma pintura, sugerindo
que a Geometria Euclidiana é um modelo da realidade não tão próximo das nossas
sensações quanto estamos acostumados a pensar.
E se acrescentarmos os pontos de fuga, isto é, se assumirmos que quaisquer
duas retas se interceptam num único ponto, que tipo de espaço geométrico teremos? Este é o tópico desta parte do texto. Construiremos um modelo para uma
geometria bidimensional sem retas paralelas, a Geometria Projetiva ou Geometria
Elı́ptica Simples. Iniciaremos com a construção do plano projetivo e somente após
estarmos familiarizados com ele, recuperaremos a idéia surgidas das sensações visuais, apresentando o plano afim no final do capı́tulo.
Axiomas da Geometria Projetiva
I Termos indefinidos
1. Ponto, reta, plano, pertence.
II Axiomas de incidência
88
CAPÍTULO 10. GEOMETRIA PROJETIVA
V Axioma das Paralelas
1. Seja l uma reta e A um ponto não em l. Então toda reta que
incide em A intercepta l.
VI Axiomas de Continuidade
1. Existe uma correspondência biunı́voca entre os números reais
e os pontos de uma reta menos um dos seus pontos.
10.1
O plano projetivo RP2
Inicialmente construiremos o conjunto que será o plano projetivo. Considere o
conjunto obtido do R3 ao retirarmos o vetor nulo o = (0, 0, 0). Numa linguagem
mais informal diz-se que o conjunto é o R3 perfurado na origem (ou simplesmente
perfurado) e a notação convencional para indica-lo é R3 \{o}.
Por simplicidade, não modificaremos as terminologias ou notações empregadas
para subconjuntos contidos em R3 . Ao falarmos que Γ é um ”plano” em R3 \{0}
fica subentendido que ele é a interseção do plano Γ ⊂ R3 com o R3 \{o}. Portanto,
se ele contiver a origem será um plano perfurado. Os mesmos comentários valem ao
empregarmos o termo ”reta” em R3 \{o}. Ela pode ou não ser perfurada, caso incida
ou não na origem. No conjunto R3 \{o} (conjunto de vetores não nulos), definimos
a relação de equivalência1
v∼w
⇔
existe um número real λ = 0 tal que v = λw.
Considere o conjunto quociente
RP2 = R3 \{o} / ∼ .
Chamaremos RP2 de plano (projetivo) e seus elementos de pontos
(projetivos).
Um elemento (classe de equivalência) do plano projetivo é chamado de ponto projetivo, ou simplesmente ponto, e será denotado por uma letra minúscula com uma
barra sobreposta, por exemplo, v, onde v é um vetor não nulo de R3 . Como sabemos, v é um subconjunto de R3 \{o} e pela definição da relação de equivalência
acima o conjunto que ele está nomeando é o conjunto dos múltiplos não nulos de v,
1
Caso o leitor não esteja familiarizado com o conceito de relação de equivalência, no Apêndice
existe um capı́tulo sobre o tópico.
10.2. RELAÇÃO ENTRE RP2 E S2
89
v = {λv; λ ∈ R e λ = 0}.
Em outras palavras, o subconjunto v ⊂ R3 \{o} é uma reta perfurada. A aplicação
quociente é a função denotada e definida por
Ψ : R3 \{o} → RP2 ,
Ψ(v) = v.
Para diminuir o esforço de leitura, em lugar de empregarmos longas barras sobre triplas para designar os pontos do plano projetivo, utilizaremos uma notação
mais simples e conveniente. Seja v = (v1 , v2 , v3 ) um ponto de R3 \{o}. Se acompanhássemos a notação deverı́amos escrever
v = (v1 , v2 , v3 )
para indicar a classe de equivalência de v. Entretanto, seguiremos a notação clássica,
já consagrada, para indicar elementos do plano projetivo, a saber,
v = (v1 : v2 : v3 ).
Tal tripla recebe um nome especial: coordenadas homogêneas de v. Seu uso trará
grandes vantagens em relação à outra notação, como veremos.
Exercı́cios propostos 10.1
1. Sejam v = (1, 2, −1) e w = (−3, −6, 3) vetores de R3 \{o}. Mostre que v = w em RP2 .
2. Se v é um vetor de R3 \{o} e 0 = λ ∈ R, mostre que v = λv.
10.2
Relação entre RP2 e S2
Para entendermos melhor o plano projetivo iremos relacioná-lo com a esfera unitária
S2 . Esta relação fica estabelecida da seguinte forma. Para cada classe de equivalência v = (v1 : v2 : v3 ) ∈ RP2 podemos determinar dois elementos da esfera
unitária S2 ⊂ R3 \{o} na classe de equivalência de v. Eles são os únicos vetores
unitários múltiplos de v, quais sejam,
1
1
v
e
−u=−
v.
u=
v
v
A divisão pela norma do vetor v está bem definida pois v = 0 e como u e −u são
múltiplos não nulos de v valem as igualdades v = u = −u. Portanto, temos uma
função projeção sobrejetora, que é a restrição da função projeção antes definida,
Ψ0 : S2 → RP2 ,
Ψ0 (u) = u,
tal que o conjunto pré-imagem de cada ponto v é formado por dois pontos de S2 ,
1
1
−1
v, −
v .
Ψ0 (v) =
v
v
90
CAPÍTULO 10. GEOMETRIA PROJETIVA
A construção acima nos dá um outro modelo para o plano projetivo que é obtido ao
identificarmos pontos antı́podas da esfera unitária. Portanto, podemos construir o
plano projetivo definindo uma relação de equivalência na esfera unitária do seguinte
modo. Sejam u, v ∈ S2 . Diz que u ∼ v se, e somente se, u = v ou u = −v. Desta
forma RP2 = S2 / ∼.2
Continuemos tentando imaginar como é o plano projetivo. Pelo visto, qualquer
ponto v ∈ RP2 pode ser representado por um ponto u = (u1 , u2 , u3 ) ∈ S2 tal que
u3 ≥ 0. Recordamos que o termo ”representa o mesmo elemento” significa que os
dois pontos determinam a mesma classe de equivalência, u = v ∈ RP2 . Portanto,
se considerarmos o hemisfério norte da esfera unitária,
He3 = {u ∈ S2 ; u, e3 ≥ 0},
a restrição da função projeção Ψ◦ : He3 → RP2 é sobrejetiva. Podem ocorrer duas
situações para a pré-imagem de um ponto projetivo u = (u1 : u2 : u3 ) por Ψ◦ ,
1. Ψ−1
◦ (u) = {u}, se u3 > 0 ou
2. Ψ−1
◦ (u) = {u, −u}, se u3 = 0.
Considere a reta elı́ptica re3 ⊂ S2 (esta reta elı́pica é o grande cı́rculo obtido
pela interseção da esfera unitária com o plano xy). A imagem desta reta elı́ptica
re3 pela projeção Ψ◦ é chamada de conjunto de pontos ideais, I∞ . Observe que e a
projeção Ψ◦ aplica o conjunto He3 /re3 , biunivocamente sobre RP2 /I∞ .
10.3
Retas projetivas
Já comentamos que grandes cı́rculos de S2 são equivalentes às retas da Geometria
Euclidiana, no sentido de que a distância percorrida sobre a esfera unitária, para
nos deslocarmos entre dois de seus pontos, é minimizada quando a trajetória é um
arco de grande cı́rculo contenda os dois pontos. A mesma questão coloca-se para o
plano projetivo. Qual a trajetória de menor comprimento que podemos percorrer
em RP2 para nos deslocar de um ponto v a um ponto w?
A questão só faz sentido se soubermos qual função distância que estamos considerando no espaço projetivo. Para enfatizar que a Geometria projetiva procura estudar apenas problemas de incidência, não envolvendo os conceitos de congruência
e de ordem, deixamos para leitura complementar do capı́tulo a apresentação da
função distância clássica considerada no plano projetivo. Com aquela distância temos a resposta, devemos percorrer uma trajetória sobre a imagem de um grande
2
Neste caso, o sı́mbolo de igualdade indica que existe uma correspondência biunı́voca entre
os conjuntos construı́dos de uma forma e de outra. Tal correspondência é estabelecida de modo
natural, como foi indicado.
10.3. RETAS PROJETIVAS
91
cı́rculo de S2 pela aplicação projeção Ψ : S2 → RP2 que contenha os pontos v e w.
Isto nos leva a fixar o seguinte termo.
Um subconjunto r ⊂ RP2 é uma reta projetiva se r for a imagem
de uma reta elı́pitca pela projeção Ψ0 : S2 → RP2 .
Uma definição equivalente com planos perfurados fica sendo:
Um subconjunto r ⊂ RP2 é uma reta projetiva se r for a imagem
de um plano perfurado Γ pela projeção Ψ : R3 \{o} → RP2 .
Existe um modo prático de nomear retas projetivas. Como sabemos, um plano
Γ ⊂ R3 que contém o = (0, 0, 0) fica determinado pelo seu vetor normal η =
(η1 , η2 , η3 ), que é um vetor não nulo. Ressaltamos tal propriedade ao utilizar a
notação Γη . Neste caso, a equação linear que define o plano é
Γη : η1 x1 + η2 x2 + η3 x3 = 0.
Um fato nos induz a pensar imediatamente no plano projetivo. Todo múltiplo não
nulo de η, λη = (λη1 , λη2 , λη3 ), onde λ é um escalar diferente de zero, também
determina o mesmo plano que contém a origem, assim, qualquer outra equação
linear que define aquele plano tem de ser da forma
Γη : λη1 x1 + λη2 x2 + λη3 x3 = 0.
As observações acima nos permitem considerar a classe de equivalência η ∈ RP2 .
Guardemos este ponto projetivo η, por um momento.
Por outro lado, a interseção de Γη com a esfera unitária S2 determina um grande
cı́rculo e todo grande cı́rculo é obtido deste modo. Por definição, a imagem deste
grande cı́rculo pela projeção Ψ : S2 → RP2 é uma reta projetiva r. Os dois fatos
juntos nos levam a fixar a seguinte notação. Ao escrevermos a expressão
a reta projetiva rη
estaremos nos referindo à reta projetiva r ⊂ RP2 determinada pela projeção do
grande cı́rculo rη = Γη ∩ S2 .
Por exemplo, e3 = (0 : 0 : 1) indica a reta projetiva re3 que é a imagem, pela
função projeção, do grande cı́rculo obtido pela interseção do plano xy com a esfera
unitária. Assim, re3 é a reta de pontos ideais, I∞ .
Exercı́cios propostos 10.2
1. Verifique quais pontos projetivos pertencem à reta projetiva rη , onde η = (1 : −1, 2).
a) p = (1 : 1 : 1).
c) u = (1 : −1 : −1).
b) q = (2 : 0 : −1).
d) v = (2 : 3 : −1).
2. Sejam v e w dois vetores linearmente independentes de Γη . Mostre que todo ponto u
92
CAPÍTULO 10. GEOMETRIA PROJETIVA
da reta projetiva rη escreve-se como u = sv + tw, onde s e t são números reais não
nulos simultaneamente.
3. Com a notação apresentada no exercı́cio anterior, faz sentido escrevermos u = sv+tw,
onde s e t são números reais não nulos simultaneamente e v, w ∈ R3 \{o}?
10.4
Plano projetivo dual
Consideremos o plano projetivo RP2 e o conjunto de suas partes, P(RP2 ). Escolhamos o subconjunto R ⊂ P(RP2 ) definido por
R é o conjunto formado por todas as retas projetivas.
Para construir um modelo geométrico que represente o conjunto R, necessitamos
fazer uma abstração, qual seja, considerar cada reta projetiva como um ponto de
um conjunto. O fato principal utilizado na construção já apresentamos no parágrafo
anterior,
cada ponto projetivo η ∈ RP2 determina uma única reta projetiva rη
e cada reta projetiva r ⊂ RP2 determina um único ponto projetivo η.
Estes comentários nos permitem reescrever o conjunto R na forma
R = {rη ; η ∈ RP2 },
e mais, permite estabelecer uma correspondência biunı́voca entre R e RP2 ,
rη ←→ η.
Logo, existem tantas retas projetivas quantos pontos projetivos! Sendo assim, tomaremos o conjunto RP2 como modelo geométrico para R. Isto causa um problema:
como distinguir na leitura um ponto projetivo de uma reta projetiva? Como primeira providência para que a confusão não ocorra, o conjunto das retas projetivas
será indicado por RP2∗ e denominado plano projetivo dual. A segunda providência é
designar os elementos de RP2∗ pelas letras gregas minúsculas η, µ, ν, etc. em lugar
de rη , rµ , rν , etc. respectivamente. Assim
rη ⊂ RP2
10.5
⇔
η ∈ RP2∗ .
Incidência
Resumindo a apresentação feita até o momento, temos:
um conjunto chamado plano (projetivo);
10.5. INCIDÊNCIA
93
elementos deste plano chamados pontos (projetivos);
subconjuntos chamados retas (projetivas);
e entendemos o conceito de uma reta incidir em um ponto.
Portanto, estamos preparados para verificar os axiomas da Geometria Projetiva
no conjunto RP2 . Na verificação utilizaremos toda a praticidade da notação e as
propriedades da Geometria elı́ptica. Ressaltamos as dualidades entre os enunciados
envolvendo pontos projetivos e retas projetivas.
Os dois últimos axiomas de incidência são óbvios. Para o primeiro, necessitamos
de um critério de incidência entre uma reta projetiva e um ponto projetivo.
Proposição 10.5.1 (Condição de incidência) Dados um ponto projetivo v ∈
RP2 e uma reta projetiva η ⊂ RP2∗ . Então
v e rη são incidentes se, e somente se, v, η = 0.
Prova Seja Γη o plano perfurado na origem cujo vetor normal é η. Veja a seguinte
sequência de equivalências,
v, η = 0
⇔
±v ∈ Γη
⇔
±
1
v ∈ rη = Γη ∩ S2
v
⇔
v=
1
v ∈ rη .
v
2
Isto termina a demonstração.
Para cada dois pontos distintos existe uma única reta que os
contém.
A validade deste axioma será registrada numa proposição.
Proposição 10.5.2 (Equação de uma reta por dois pontos) Por dois pontos projetivos distintos v, w ∈ RP2 incide uma única reta projetiva, a saber,
η = v × w ∈ RP2∗ .
Prova Dados v, w ∈ RP2 dois pontos distintos, sejam a e b elementos de S2 que
representam aqueles dois pontos projetivo, respectivamente. Observe que b = −a,
caso contrário terı́amos v = w, contradizendo a hipótese. Considere o único plano
em R3 contendo os pontos a, b e a origem, isto é, considere o plano Γη , onde η = a×b.
A interseção deste plano com a esfera unitária determina o grande cı́rculo
rη = S 2 ∩ Γ η .
94
CAPÍTULO 10. GEOMETRIA PROJETIVA
Por definição, o conjunto Ψ (rη ) é a reta projetiva rη , e como a e b são pontos deste
grande cı́rculo, suas imagens Ψ(a) = a = v e Ψ(b) = b = w pertencem àquela reta
projetiva. A prova da unicidade da reta deixamos ao cuidados do leitor.
2
No plano projetivo não existe paralelismo entre retas projetivas. Duas retas
distintas sempre concorrem em um único ponto. Demonstre a proposição a seguir.
Proposição 10.5.3 (Concorrência de duas retas) Duas retas projetivas distintas, η, ν ∈ RP2∗ têm um num único ponto, a saber,
v = η × ν ∈ RP2 .
Diz-se que três pontos u, v, w ∈ RP2 são colineares se existe uma reta projetiva
incidindo sobre os mesmos. Também existe um critério simples para determinar se
três pontos do plano projetivo são colineares.
Proposição 10.5.4 (Equação de colinearidade para três pontos) Dados três
pontos u, v, w ∈ RP2 temos que
u, v, w são colineares se, e somente se, det[u, v, w] = 0.
Prova Vamos assumir que os pontos são distintos, caso contrário a demonstração
é trivial.
Os pontos são (projetivamente) colineares se, e somente se, existe um plano Γη
contendo a origem e tal que a imagem do grande cı́rculo Γ∩S2 pela função quociente
Ψ0 : S2 → RP2 contém estes pontos. Por sua vez, tal ocorre se, e somente se, o
plano contém os representantes (que são vetores não nulos e não colineares em R3 )
dos três pontos, u, v, e w. Observando que um vetor normal ao plano é η = v × w
e que u é perpendicular a η, podemos afirmar que u, v, w ∈ Γ se, e somente se,
det[u, v, w] = u, v × w = u, η = 0.
2
Proposição 10.5.5 (Equação de concorrência para três retas) Dadas três retas projetivas η, µ, ν ∈ RP2∗ . temos que
as retas η, µ, ν são concorrentes se, e somente se, det[η, µ, ν] = 0.
Prova Exercı́cio.
2
Uma reta projetiva menos um dos seus pontos é um modelo de uma
reta Euclidiana.
O axioma de continuidade será deixado como exercı́cio.
10.6. GEOMETRIA AFIM
95
Exercı́cios propostos 10.3
1. Sejam v, w ∈ RP2 . Mostre que qualquer ponto da reta projetiva r definida por estes
pontos escreve-se na forma u = sv + tw, onde s e t são números reais não iguais a
zero, simultaneamente.
2. Verifique se a reta projetiva determinada por u e u , a reta determinada por v e v e
aquela determinada por w e w são concorrentes para os seguintes valores.
a) u = (1 : 1 : 1), v = (1 : −1 : 1), w = (1 : −2 : 0),
u = (1 : 1 : 2), v = (1 : −1 : 0), w = (1 : −2 : 2).
b) u = (1 : 1 : 2), v = (2 : 0 : 1),
w = (1 : 2 : 1),
u = (2 : 2 : 1), v = (3 : 1 : 2),
w = (0 : 1 : 0).
c) u = (1 : 1 : 2), v = (1 : −1 : 1), w = (1 : 1 : −2),
u = (0 : 1 : 1), v = (2 : 2 : 1),
w = (1 : 0 : −1).
10.6
Geometria Afim
Como foi visto, o espaço vetorial R2 é identificado com qualquer plano Euclidiano utilizando-se um sistema de eixos Cartesianos. Nesta seção identificaremos o
espaço R2 com uma parte do plano projetivo, que será chamado de Plano afim. Na
Geometria Afim não consideramos o grupo de congruência.
Axiomas da Geometria Afim
I Termos indefinidos
1. Ponto, reta, plano, pertence, está entre.
II Axiomas de incidência
III Axiomas de ordem
V Axioma das Paralelas
VI Axiomas de Continuidade
O plano Euclidiano R2 é naturalmente identificado com o plano horizontal Π :
z = 1 (paralelo ao plano xy) em R3 \{o} que por sua vez, é um plano tangente à
esfera unitária S2 no polo norte, pn = (0, 0, 1). A identificação é simples,
(x, y) ↔ (x, y, 1).
Agora, cada ponto (x, y, 1) ∈ Π ⊂ R3 \{o} determina um único ponto em RP2 ,
qual seja, (x : y : 1). Considere o conjunto denotado e definido por
96
CAPÍTULO 10. GEOMETRIA PROJETIVA
AP2 = {(x : y : 1) ∈ RP2 ; (x, y, 1) ∈ R3 }.
Chamaremos AP2 de plano (afim) e seus elementos de pontos (afins).
Observe que qualquer ponto v = (x : y : z) do
plano projetivo, com a terceira coordenada homogênea não nula, z = 0, está no plano afim,
pois o ponto pode ser representado como v =
( xz : yz : 1) e v corresponde ao ponto ( xz , yz ) ∈ R2 .
Chamaremos esta identificação de identificação
afim. Em resumo, o plano afim é o plano projetivo menos a reta ideal I∞ . Como a reta ideal é a reta projetiva rη , com η = (0 :
0 : 1), podemos defini-lo também na forma
AP2 = {(u1 : u2 : u3 ) ∈ RP2 ; u3 = 0}.
10.7
Retas afins
Voltemos ao problema da sensação visual colocado no ı́nicio do capı́tulo: duas retas
que consideramos paralelas convergem para um ponto de fuga. O plano afim capta
esta sensação.
Chamaremos de reta afim é interseção de uma reta projetiva com
AP2 .
Como qualquer reta projetiva intercepta a reta ideal I∞ , num único ponto, segue
que uma reta afim é uma reta projetiva menos o seu ponto ideal.
O plano afim dual, o conjunto formado pelas reta afins, será denotado por AP2∗
e uma reta afim será indicada tanto por η ∈ AP2∗ quanto por rη ⊂ AP2 , em que
η = (η1 , η2 , η3 ) com η3 = 0. Observe que AP2∗ pode ser identificado com o plano
projetivo menos o ponto η = (0 : 0 : 1).
O ponto principal da construção diz respeito à relação existente entre as retas
Euclidianas em R2 e as retas afins. Uma reta l ⊂ R2 fica determinada por um
vetor normal n = (η1 , η2 ) (não nulo) e por um dos pontos no qual ela incide,
p = (p1 , p2 ) ∈ l. Como sabemos, a equação linear que define a reta é
l : η1 x + η2 y + η3 = 0,
onde η3 é uma constante que depende do vetor normal n e do ponto p. Um exemplo
deixará mais clara a notação.
Exemplo 10.7.1 A reta Euclidiana l ⊂ R2 cuja equação é
l : 3x − 2y + 6 = 0,
10.7. RETAS AFINS
97
tem vetor normal n = (3, −2) e contém, por exemplo, o ponto, p = (0, 3). Aqui,
estamos denotando η1 = 3, η2 = −2 e η3 = 6. Para identificar o plano R2 com o
plano Euclidiano Π ⊂ R3 , em termos de equação, Π : z = 1, estabelecemos que
(x, y) ↔ (x, y, 1).
A reta Euclidiana l é identificada com uma reta s contida naquele plano horizontal.
Por outro lado, uma reta em R3 fica determinada pela interseção de dois planos
em R3 , neste caso, um plano vertical (perpendicular ao plano xy) e outro plano
horizontal, a saber,
3x − 2y + 6 = 0
s:
z−1=0
Mas existem infinitos planos que interceptados com o plano Π : z = 1 determinam a
mesma reta s, e entre tantos, estamos interessados no plano Γη contendo a origem.
Ele é precisamente aquele que tem equação
Γη : 3x − 2y + 6z = 0.
onde η = (3, 2, 6). Portanto, s = Π ∩ Γη ,
3x − 2y + 6z = 0
s:
.
z−1 = 0
É claro que ao projetarmos os pontos de s sobre o plano afim, obtemos a reta afim
2
rη , com η = (3 : −2 : 6).
Proposição 10.7.1 A identificação de R2 com o plano afim AP2 tansforma a reta
Euclidiana l : η1 x + η2 y + η3 = 0 na reta afim rη , onde η = (η1 : η2 : η3 ).
Alguns exemplos ilustrarão a praticidade computacional obtida com a identificação afim.
Exemplo 10.7.2 (Interseção de retas em R2 ) Encontremos a interseção das
retas Euclidianas planas cujas equações são
l1 : x − 3y + 2 = 0,
l2 : 2x − y = 0.
As retas afins correspondentes são η = (1 : −3 : 2) e ν = (2 : −1 : 0), elementos
de AP2∗ . A interseção ocorre no ponto v = η × ν = (2 : 4 : 5). O representante
no plano Π : z = 1 é v = ( 25 , 45 , 1), portanto, a interseção da retas l1 ∩ l2 é o ponto
2
( 25 , 45 ) ∈ R2 .
98
CAPÍTULO 10. GEOMETRIA PROJETIVA
Exemplo 10.7.3 (Equação de reta por dois pontos em R2 ) Seja l a reta
Euclidiana em R2 determinada pelos pontos p = (1, 1) e q = (2, −1). Após identificação, os pontos afins correspondentes são p = (1 : 1 : 1) e q = (2 : −1 : 1). A
reta afim η ∈ AP2∗ contendo os dois pontos é η = p × q = (2 : 1 : −3). Portanto,
l : 2x + y − 3 = 0.
2
Exemplo 10.7.4 (Retas paralelas em R2 ) Examinemos as retas afins determinadas por retas paralelas l e l em R2 , mas não coincidentes. Como as retas são
paralelas e distintas, elas admitem equações na forma
l : η1 x + η2 y + η3 = 0,
l : η1 x + η2 y + η3 = 0,
com η3 = η3 . As retas afins determinadas por elas são, respectivamente, η =
(η1 : η2 : η3 ) e ν = (η1 : η2 : η3 ), elementos de AP2∗ . Para calcular o ponto de
interseção das retas afins, deveremos utilizar o método estabelecido para o cálculo
de interseções de retas projetivas, ou seja a interseção deveria ser
p = η × ν = (η2 η3 − η2 η3 : η1 η3 − η1 η3 : 0).
Mas este ponto projetivo é um ponto ideal que não pertencem ao plano afim. Logo,
retas Euclidianas paralelas determinam retas afins que também não se interceptam
no plano afim. O ponto p = η × ν é aquele ponto de fuga para o qual, aparentemente, as retas paralelas convergem.
2
Comentário Essencialmente o plano afim é o hemisfério norte de S2 sem o equador. Ao induzirmos a métrica elı́ptica no plano afim obtemos segmentos que têm as
mesmas medidas mas não podem ser colocados em correspondência biunı́voca utilizando isometrias de S2 . Isto é, não podemos estabelecer a relação entre congruência
e medida. O mesmo ocorre com triângulos afins.
Exercı́cios propostos 10.4
1. Determine a interseção, se existir, das retas l1 e l2 do plano Euclidiano utilizando o
plano afim, onde:
l2 : 3x − y + 4;
a) l1 : 2x − 3y = 0,
b) l1 : y = 2x,
l2 : x = 4y − 3;
c) l1 : 3x − y = 0,
l2 : 2y = 6x − 4;
d) l1 : y − 3 + x = 2, l2 : x − 1 = y − 1.
2. Utilize o plano afim para estabelecer a equação Cartesiana reta Euclidiana que contém
os pontos p e q, onde:
a) p = ( 2, 1) e q = (1, 1); b) p = (−2, 1) e q = (1, 0);
c) p = (−1, 4) e q = (0, 1); d) p = ( 2, 2 ) e q = (4, 4).
10.8. LEITURA COMPLEMENTAR
10.8
99
Leitura complementar
1. Axiomas da Geometria Afim Qualquer resultado demonstrado na Geometria Afim permanece
válido na Geometria Euclidiana, não sendo válida
a afirmação oposta. O termo ”afim” foi introduzido pelo matemático suiço Leonard Euler (1707 −
1783). Euler nasceu em Basiléia, e estudou com
Johann Bernoulli. Apesar do fato de ter sido pai
de mais de vinte filhos e ficado cego aos 50 anos,
foi um matemático prolifı́co, tendo produzido mais
de oitocentos trabalhos e livros, com constribuições
fundamentais em todas as áreas da Matemática.
Convidado pela czarina Catarina, a grande, para trabalhar na sua corte, imprimiu sua personalidade cientı́fica na matemática russa, influência que perdura
até os dias atuais. Lá não existe uma separação nı́tida entre Matemática pura
e Matemática aplicada como estamos acostumados a fazer no ocidente.
2. Axiomas da Geometria Projetiva Real O
alemão Karl Georg Christian von Staudt (1798
− 1867) foi o primeiro matemático que viu a
possibilidade de construir uma Geometria lógica
sem o conceito de congruência. Na sua época as
atenções estavam voltadas para o exame de estruturas geométricas que fossem bastante simples.
Um tal geometria define-se, essencialmente, postulando axiomas de incidência. Mas o primeiro a propor o acréscimo de pontos ideais foi o astrônomo
alemão Johannes Kepler (1571 − 1630). Sugestão
não levada em conta, na época.
3. Distância em RP2 A distância (clássica) em RP2 é definida utilizando-se dois
objetos conhecidos:
i) a pojeção Ψ : S2 → RP2 ;
ii) a distância θ(a, b) da esfera unitária S2 .
Como um ponto em RP2 pode ser representado por elementos de S2 , definimos
d : RP2 × RP2 → R, por d (v, w) = min{θ (a, b) , θ (a, −b)},
onde a, b ∈ S2 são quaisquer pontos que representam v e w, respectivamente.
O sı́mbolo min significa que devemos escolher o menor valor entre os dois
números.
Capı́tulo 11
Colineação
Nos próximos dois capı́tulos estudaremos as aplicações projetivas, ou projetividades,
que são classificadas em dois tipos,
colineação
projetividade
.
polaridade
correlação
não polaridade
Uma colineação é uma aplicação bijetiva ψ : RP2 → RP2 que preserva colinearidade,
ou seja, se u, v e w são pontos projetivos colineares, então as imagens ψ(u), ψ(v)
e ψ(w) são também pontos projetivos colineares.
O leitor já deve ter percebido que os tópico aqui examinados são colocado numa
linguagem algébrica. Este caso não foge à regra. A uma colineação, associamos
um operador linear do R3 e com ele em mãos, iremos desenvolver a teoria sem
dificuldades.
No próximo capı́tulo trataremos das correlações. Antecipemos este conceito. O
espaço das retas projetivas, ou seja, o plano projetivo dual, RP2∗ , foi identificado
com o plano projetivo, RP2 , portanto satisfaz aos axiomas da Geometria Projetiva.
Uma correlação é uma aplicação bijetiva entre os planos projetivos, ρ : RP2 → RP2∗ ,
possuindo a propriedade de colinearidade dual, ou seja, se u, v e w são três pontos
projetivos colineares então ρ(u) = η, ρ(v) = µ e ρ(w) = ν são retas projetivas
concorrentes.
11.1
Operador linear e colineação
Um operador linear invertı́vel A : R3 → R3 induz uma aplicação no espaço projetivo
basta definir
11.1. OPERADOR LINEAR E COLINEAÇÃO
A : RP2 → RP2 ,
101
A(x : y : z) = A(x, y, z).
Numa forma mais compacta, escrevemos A(v) = A(v). Antes de mostrarmos que
de fato a aplicação está bem definida vejamos um exemplo.
Exemplo 11.1.1 A matriz a seguir é não singular pois det[A] = −10,
1 0 −1
[A] = 2 0
3 .
2 2
2
Como sabemos, o operador linear A : R3 → R3 definido por [A] é invertı́vel. A
colineação induzida no plano projetivo é a aplicação A : RP2 → RP2 ,
A(x : y : z) = (x − z : 2x + 3z : 2x + 2y + 2z).
2
Proposição 11.1.1 Seja A : R3 → R3 um operador linear invetı́vel. Então a
aplicação A : RP2 → RP2 , A(v) = A(v), está bem definida e é uma colineação.
Prova A boa definição é conseqüência de dois fatos.
1o ) Se v ∈ RP2 então v = (0, 0, 0). Sendo A invertı́vel segue que A(v) = o. Logo,
o elemento A(v) ∈ RP2 está bem definido.
2o ) O valor de A num ponto projetivo não depende do representante do ponto.
Vejamos esta afirmação. Sejam u, v ∈ R3 tais que u = v. Sendo assim, existe um
número real λ = 0 tal que u = λv. Avaliemos A(u) levando em conta que A é um
operador linear em R3 ,
A(u) = A(λv) = λA(v) = A(v).
Verificar que a aplicação A é injetiva e sobrejetiva ficará como exercı́cio. Nos
ocuparemos em mostrar que A é uma colineação. Sejam u, v e w pontos projetivos
colineares. Pelo critério de colinearidade temos que det [u, v, w] = 0. Apliquemos o
mesmo critério para os pontos projetivos A(u), A(v) e A(w),
det [A(u), A(v), A(w)] = det ([A][u, v, w]) = det[A] det[u, v, w] = 0.
2
Exercı́cios propostos 11.1
1. Mostre as afirmações.
(a) A composta de duas colineações é uma colineação.
(b) A aplicação inversa de um operador linear invertı́vel A em R3 define uma colineação que é a inversa da colineação definida por A.
102
CAPÍTULO 11. COLINEAÇÃO
(c) Se A e B são dois operadores lineares invertı́veis em R3 que definem a mesma
colineação então A é um múltiplo de B por algum escalar λ = 0.
(d) Toda colineação definida por por um operador linear invertı́vel de R3 tem um
ponto fixo.
11.2
Construção de colineações
Para construir um operador linear A : R3 → R3 basta estabelecer quais são os
valores de A nos vetores da base canônica C = {e1 , e2 , e3 }. Escolhidos os valores
A(e1 ) = u, A(e2 ) = v e A(e3 ) = w, a matriz canônica do operador linear é a matriz
[A] = [u, v, w]. Quando o conjunto {u, v, w} é uma base de R3 o operador linear A
é invertı́vel.
Para construir colineações procedemos da mesma forma, entretanto, o grau de
liberdade é menor, é necessário prefixar o valor da colineação em quatro pontos
projetivos não colineares três a três. Este é o teorema desta seção. A demonstração
da proposição a seguir é construtiva, devendo ser utilizada nos exemplos numéricos.
Proposição 11.2.1 Sejam u, v, w e t pontos de RP2 não colineares três a três.
Então existe uma colineação A : RP2 → RP2 induzida por um operador linear
invertı́vel A : R3 → R3 , tal que
A(e1 ) = u,
A(e2 ) = v,
A(e3 ) = w,
A(1 : 1 : 1) = t.
Mais ainda, o operador linear é definido pela matriz
[A] = [k1 u, k2 v, k3 w] ,
onde k1 = 0, k2 = 0 e k3 = 0 são as constantes
k1 =
det[t, v, w]
,
det[u, v, w]
k2 =
det[u, t, w]
,
det[u, v, w]
k3 =
det[u, v, t]
.
det[u, v, w]
Além disto, se um outro operador linear invertı́vel B : R3 → R3 define a mesma
colineação que A então B ≡ λA para algum escalar λ =
0.
Prova Como sempre, escolhamos representantes dos pontos projetivos,
u = (u1 , u2 , u3 ),
v = (v1 , v2 , v3 ),
w = (w1 , w2 , w3 ),
t = (t1 , t2 , t3 ).
Por hipótese, três pontos projetivo diferentes da lista são não colineares. Sendo
assim, os três primeiros vetores u, v, w formam uma base ordenada de R3 , fato
eqüivalente a afirmar que det[u, v, w] = 0. Guardemos esta informação.
Recordamos que para qualquer ponto p ∈ RP2 vale a igualdade p = kp, para
qualquer escalar k = 0. Logo, ao exigirmos que A(ei ) sejam aqueles valores, estamos
11.2. CONSTRUÇÃO DE COLINEAÇÕES
exigindo que
103
A(e1 ) = (k1 u1 , k1 u2 , k1 u3 ),
A(e2 ) = ( k2 v1 , k2 v2 , k2 v3 ),
A(e3 ) = (k3 w1 , k3 w2 , k3 w3 ),
onde ki = 0, i = 1, 2, 3, de onde concluı́mos que a matriz [A] deve ter a forma
k1 u1 k2 v1 k3 w1
[A] = k1 u2 k2 v2 k3 w2 .
k1 u3 k2 v3 k3 w3
Observamos que ela é não singular, pois
det[A] = k1 k2 k3 det[u, v, w] = 0.
Para determinar os ki ’s lançamos mão do quarto valor, A(1 : 1 : 1) = (t1 : t2 : t3 ).
A condição
A(1, 1, 1) = (t1 , t2 , t3 )
nos leva ao sistema de equações lineares expresso na forma matricial como
k1 u1 k2 v1 k3 w1
1
t1
t2 = k1 u2 k2 v2 k3 w3 1
t3
k1 u3 k2 v3 k3 w3
1
k1
u1 v1 w1
= u2 v2 w2 k2 .
u3 v3 w3
k3
Como det[u, v, w] = 0 podemos resolver o sistema pela regra de Cramer e obter os
valores k1 , k2 e k3 como enunciado.
A última afirmação da proposição ficará como exercı́cio.
2
Na próxima seção mostraremos que só existe aquela colineação assumindo os
quatro valores prefixados.
Exemplo 11.2.1 Sejam u = (1 : 1 : 0), v = (0 : 1 : 1), w = (1 : 1 : 1) e
t = (3 : 0 : 1) pontos projetivo. Determinemos uma colineação A : RP2 → RP2 , tal
que
A(e1 ) = u,
A(e2 ) = v,
A(e3 ) = w,
Os pontos são não colineares três a três pois
A(1 : 1 : 1) = t.
104
CAPÍTULO 11. COLINEAÇÃO
det[u, v, w] = 1,
k1 = det[t, v, w] = −1,
k2 = det[u, t, w] = −3,
k3 = det[u, v, t] = 4.
Pela última proposição devemos construir uma
k1 u1 k2 v1
[A] = k1 u2 k2 v2
k1 u3 k2 v3
matriz do tipo
k3 w1
k3 w2 .
k3 w3
Observe que, praticamente, todas as entradas da matriz foram calculadas,
−1
0 4
[A] = −1 −3 4 .
0 −3 4
Portanto, A(x : y : z) = (−x + 4z : −x − 3y + 4z : −3y + 4z).
2
Teorema 11.2.1 Dados dois conjuntos de pontos de RP2 ,
{u, v, w, t},
{u , v , w , t },
tais que três pontos quaisquer de cada um dos conjunto são não colineares. Então
existe uma colineação A : RP2 → RP2 induzida por um operador linear invertı́vel
A : R3 → R3 , tal que
A(u) = u ,
A(v) = v ,
A(w) = w ,
A(t) = t .
Além disto, se um outro operador linear B : R3 → R3 define a mesma colineação
que A então B ≡ λA para algum escalar λ = 0.
Prova Sabemos construir colineações C : RP2 → RP2 e D : RP2 → RP2 tais que
C(e1 ) = u,
D(e1 ) = u ,
C(e2 ) = v,
C(e3 ) = w,
D(e2 ) = v ,
D(e3 ) = w ,
C(1 : 1 : 1) = t,
D(1 : 1 : 1) = t .
Agora, como a inversa de uma colineação é uma colineação e a composta de duas
−1
é a colineação procurada. A
colineações é uma colineação, a aplicação D ◦ C
segunda parte do teorema é um exercı́cio.
2
Exercı́cios propostos 11.2
1. Seja A : R3 → R3 um operador linear tal que A(v) = λv v, onde λv é um escalar que
depende de v. Mostre que λv = λ0 para todo v.
2. Mostre que se dois operadores lineares A, B : R3 → R3 induzem a mesma colineação
no plano projetivo então B ≡ λA, para algum escalar λ = 0.
11.3. TEOREMA FUNDAMENTAL
105
3. Sejam u, v, w e t pontos de RP2 . Encontre uma matriz que define a colineação
A : RP2 → RP2 tal que A(e1 ) = u, A(e2 ) = v, A(e3 ) = w e A(1 : 1 : 1) = t para os
seguintes valores.
a) u = (0 : 1 : 1),
v = (1 : 0 : −1), w = (2 : 1 : 0),
t = (1 : 1 : 3).
b) u = (1 : 1 : 1),
v = (1 : 1 : −1), w = (1 : 2 : −1), t = (1 : 2 : 3).
w = (1 : 2 : 3),
t = (1 : 2 : −1).
c) u = (1 : 1 : −1), v = (1 : 1 : 1),
d) u = (2 : 1 : 0),
v = (1 : 1 : 3),
w = (0 : 1 : 1),
t = (1 : 0 : −1).
4. Determine a inversa das matrizes.
2
0
a) [A] = 4 1
1
2
0
d) [D] = 4 1
1
3
2
1 5;
0
3
2
3
2
3
2
1 1
0
1 1
0 1 5 ; c) [C] = 4 1
0 1 5;
b) [B] = 4 1
0 −1 3
1 −1 3
2
3
2
3
2 1
1
1
1
1
1 1
1 1 5 ; e) [E] = 4 1
1
2 5 ; f ) [F ] = 4 1
1 2 5;
0 3
1 −1 −1
1 −1 3
2
3
2
3
1
1 1
1
1 1
2 2 5.
2 2 5 ; h) [H] = 4 1
g) [G] = 4 1
−1 −1 3
1 −1 3
1
0
−1
5. Verifique que a matriz [A], descrita ao lado, define
uma colineação em RP2 e determine os pontos fixados
por A.
11.3
1 −1 1
[A] = −1
1 1 .
1
1 2
Teorema fundamental
Como visto na seção anterior, um operador linear invertı́vel A : R3 → R3 induz uma
colineação A : RP2 → RP2 . A recı́proca deste fato também e verdadeira.
Teorema 11.3.1 (Teorema fundamental da Geometria Projetiva) Toda co
-lineação ψ : RP2 → RP2 é induzida por um operador linear invertı́vel A : R3 → R3 .
A demonstração seguirá de dois resultados. O primeiro afirma que o único
automorfismo do corpo dos reais é a aplicação identidade. O segundo resultado
classifica todas funções do R2 nele próprio que aplica retas em retas. Demonstremos
o primeiro resultado
Proposição 11.3.1 Se f : R → R é uma aplicação não identicamente nula tal que
para quaisquer x e y reais valem as igualdades:
a) f (x + y) = f (x) + f (y);
b) f (xy) = f (x)f (y).
(aditiva)
(multiplicativa)
106
CAPÍTULO 11. COLINEAÇÃO
Então f (x) = x.
Prova Registremos algumas observações.
1a Observação f (a) = 0 se, e somente se, a = 0. Vejamos. As igualdades
f (0) = f (0 + 0) = f (0) + f (0) implicam que f (0) = 0. Suponha, por absurdo, que
exista um a = 0 tal que f (a) = 0. Então
x
x
x
= f (a)f
= 0 f ( ) = 0.
f (x) = f a
a
a
a
Isto significa que f é identicamente nula, uma contradição.
2a Observação f é uma função ı́mpar, pois
0 = f (0) = f (x + (−x)) = f (x) + f (−x),
3a Observação f (1) = 1. Para qualquer x real temos que f (x) = f (1x) =
f (1)f (x), portanto, f (x)(f (1) − 1) = 0. Como f não é identicamente nula, existe
x0 tal que f (x0 ) = 0. Logo, f (1) = 1.
4a Observação f (x2 ) = [f (x)]2 para qualquer x pois f (x2 ) = f (x x) = f (x)f (x).
Afirmação 1 f (nx) = nf (x) para quaisquer inteiro n e qualquer x real.
Fixemos qualquer x real. Demonstremos por indução que a afirmação é verdadeira para qualquer n ≥ 0. Para n = 0 a afirmação é correta pelas observações iniciais. Vamos assumir que a afimação seja verdadeira para n. Calculemos f ((n + 1)x),
f ((n + 1)x) = f (nx + x) = f (nx) + f (x) = nf (x) + f (x) = (n + 1)f (x).
Portanto, a firmação é verdadeira para qualquer n ≥ 0.
Para n < 0, utilizamos o fato da função ser ı́mpar, f (nx) = f ((−n)(−x)) =
(−n)f (−x) = (−n)(−f (x)) = nf (x). Isto conclui a demonstração da afirmação.
n
x) =
Afirmação 2 f ( m
n
m f (x)
para qualquer racional
n
m
e qualquer x real.
Fixemos qualquer x. Seja m = 0 um inteiro. Pela afirmação anterior podemos
escrever,
m 1
x = mf
x .
f (x) = f
m
m
1
x) =
Logo, f ( m
1
m f (x).
n
n
f(m
)= m
Agora é fácil concluir a demonstração da afirmação.
Afirmação 3
para todo racional
n
m.
A demonstração é trivial,
n n
n
n
=f
1 = f (1) = .
f
m
m
m
m
11.3. TEOREMA FUNDAMENTAL
107
Afirmação 4 f preserva a ordem, isto é, se x < y então f (x) < f (y).
Seja x > 0. Como existe a > 0 tal que a2 = x, temos f (x) = f (a2 ) = [f (a)]2 > 0.
Isto é suficente para mostrar que f preserva a ordem. Vejamos. Se x < y então
0 < y − x. Pelo visto, 0 < f (y − x) = f (y) − f (x), portanto f (x) < f (y).
Concluı́ndo a demonstração da proposição. Suponha, por absurdo, que exista x0
tal que f (x0 ) = x0 . Sem perda de generalidade, podemos assumir que f (x0 ) < x0 .
Como sabemos, dados dois números reais distintos, existe um racional entre eles.
Escolha um racional a tal que f (x0 ) < a < x0 . Como f preserva a ordem e a
é racional, temos que a = f (a) < f (x0 ), uma contradição. Logo f (x) = x para
qualquer x real.
2
Proposição 11.3.2 Seja B : R2 → R2 é uma função biunı́voca tal que B(o) = o.
Se B aplica retas Euclidianas em retas Euclidianas então B é um operador linear
invertı́vel.
Prova O termo ”aplica retas em retas” significa que a imagem de uma reta Euclidiana está contida numa reta Euclidiana.
Sejam l1 e k retas tais que B(l1 ) ⊂ k. Inicialmente mostraremos que B(l1 ) = k
e l1 é a única reta cuja imagem está contida em k.
Vamos supor, por absurdo, que exista um ponto q ∈ k mas q ∈
/ B(l1 ). Neste
caso, como B é biunı́voca existe um único ponto q0 tal que B(q0 ) = q. É claro que
/ l1 . Seja l2 uma reta que contém q0 e é perpendicular a l1 em q1 ∈ l1 . Como
q0 ∈
B aplica retas em retas e B(q0 ), B(q1 ) ∈ k estão em B(l2 ) ⊂ k. Agora, dado um
ponto qualquer p de R2 , ele pertence a uma reta l que intercepta l1 ∪ l2 em pelo
menos dois pontos, digamos p1 e p2 . Novamente, como B(p1 ), B(p2 ) ∈ k segue que
B(l) ⊂ k. Isto mostra que B(R2 ) ⊂ k. Uma constradição, pois estamos supondo
que B é sobrejetiva.
Portanto, só existe a reta l1 tal que B(l1 ) = k.
Mostremos agora que as imagens por B de quaisquer duas retas paralelas l1 e l2
são duas retas paralelas. Pelo visto, as suas imagens B(l1 ) e B(l2 ) são retas distintas.
Suponha, por absurdo, que exista um ponto na interseção p ∈ B(l1 ) ∩ B(l2 ). Sendo
assim, a pré-imagem B −1 (p) tem pelo menos dois pontos, um em cada reta paralela,
contradizendo a hipótese de B ser biunı́voca.
Afirmação 1 Se {v, w} é uma base de R2 então B(v + w) = B(v) + B(w).
A hipótese de ser base implica que v e w não são nulos e não colineares. Sejam
l1 e l2 as retas distintas que concorrem na origem e tais que v ∈ l1 e w ∈ l2 . Sendo
assim, {v + w} = l1 ∩ l2 , em que l1 é a reta que passa por w e é paralela à reta l1
108
CAPÍTULO 11. COLINEAÇÃO
enquanto l2 é a reta que passa por v e é paralela à l2 . Examinemos as imagens por
B das retas acima,
B(o), B(v) ∈ k1 = B(l1 )
e
B(o), B(w) ∈ k2 = B(l2 ).
Como sabemos, k1 e k2 são retas distintas, logo, β = {B(v), B(w)} é uma base de
R2 pois nenhum vetor é nulo e são não colineares. Agora, as retas k1 = B(l1 ) e
k2 = B(l2 ) são retas que passam, respectivamente, por B(w) e B(v) e são paralelas,
respectivamente, a k1 e k2 . É claro que {B(v) + B(w)} = k1 ∩ k2 . Por outro lado,
{B(v + w)} = B(l1 ∩ l2 ) = k1 ∩ k2 , portanto, B(v + w) = B(v) + B(w).
Afirmação 2 Existe uma transformação linear invertı́vel A : R2 → R2 tal que a
composta C = A−1 ◦ B é expressa na forma C(x, y) = (f (x), g(y)), em que f e g
são biunı́vocas, f (0) = g(0) = 0 e f (1) = g(1) = 1. E mais, C satisfaz as hipóteses
do teorema.
Como feito na Afirmação 1, mostramos que o conjunto de dois vetores β =
{B(e1 ), B(e2 )} é uma base de R2 . Seja A : R2 → R2 a transformação linear tal que
A(e1 ) = B(e1 ) e A(e2 ) = B(e2 ). Mais precisamente, seja A(x, y) = xB(e1 )+yB(e2 ).
Como β é uma base então A é invertı́vel. Recordamos que A−1 é uma transformação
linear.
Sendo uma transformação linear, A−1 aplica retas em retas, A−1 (o) = o e, sendo
invertı́vel, A−1 é sobrejetiva. Agora, é imediato concluir que C = A−1 ◦ B também
é uma aplicação biunı́voca, aplica retas em retas e C(o) = o. Portanto, C satisfaz
todas as hipóteses da proposição.
Por construção, C(o) = o, C(e1 ) = e1 e C(e2 ) = e2 . Isto implica que C preserva os eixos ox e oy. Logo, C transforma retas horizontais em retas horizontais
enquanto retas verticais são transformadas em retas verticais. Isto é suficiente para
mostrar que C(x, y) = (f (x), g(y)). A biunicidade de f e g e os valores enunciados
deixaremos como exercı́cio. Isto conclui a demonstração da afirmação.
Iremos mostrar que C ≡ id. Disto segue que A ≡ B, portanto, B é uma
transformação linear.
Afirmação 3 As funções coordenadas de C(x, y) = (f (x), g(y)) são aditivas, ou
seja, f (x1 + x2 ) = f (x1 ) + f (x2 ) e g(y1 + y2 ) = g(y1 ) + g(y2 ).
Examinemos apenas f , o estudo de g é similar.
Dados x1 e x2 . Se x1 = 0, considere a base {v, w} do R2 , em que v = (x1 , 0)
e w = (x2 , 1). Pela Afirmação 1, vale a aditividade C(v + w) = C(v) + C(w),
implicando que f (x1 + x2 ) = f (x1 ) + f (x2 ). Se x1 = 0, como f (0) = 0, é imediato
verificar que f (x1 + x2 ) = f (x1 ) + f (x2 ).
Afirmação 4 f ≡ g e f (x1 x2 ) = f (x1 )f (x2 ).
11.3. TEOREMA FUNDAMENTAL
109
Seja α ∈ R. Consideremos uma reta com inclinação α, digamos l : y = αx + b0 ,
e calculemos a inclinação i(α) da reta imagem C(l). Para isto, sejam (0, b0 ) e
(x, αx + b0 ) dois pontos distintos de l. É claro que x = 0. A inclinação de C(l) é
i(α) =
g(αx)
g(αx + b0 ) − g(b0 )
=
.
f (x) − f (0)
f (x)
A última igualdade segue por g(αx + b0 ) = g(αx) + g(b0 ) e f (0) = 0. Avaliando
em x = 1 obtemos que i(α) = g(α) pois f (1) = 1. Logo, g(αx) = g(α)f (x) para
quaisquer x e α. Avaliando em α = 1 concluı́mos que g ≡ f pois g(1) = 1. Portanto,
f (αx) = f (α)f (x). Isto encerra a demonstração da afirmação.
Pelo visto, f (x) = x = g(x). Logo, C(x, y) = (f (x), g(y)) = (x, y), encerrando a
demonstração da proposição.
2
Prova do Teorema fundamental da Geometria Projetiva Seja ψ : RP2 →
RP uma colineação. Sem perda de generalidade, podemos assumir que ψ preserva
a reta ideal I∞ e fixa o ponto (0 : 0 : 1). Caso isto não ocorra, consideramos os
pontos projetivos não colineares três a três,
2
a = ψ(1 : 0 : 0) ∈ ψ(I∞ ),
b = ψ(0 : 1 : 0) ∈ ψ(I∞ )
e
c = ψ(0 : 0 : 1),
e construı́mos uma colineação D : RP2 → RP2 induzida de um operador linear do
R3 tal que
D(a) = (1 : 0 : 0),
D(b) = (0 : 1 : 0)
e
D(c) = (0 : 0 : 1).
Logo, a composta D ◦ ψ : RP2 → RP2 é uma colineação que fixa o ponto (0 : 0 : 1)
e preserva a reta ideal desde que fixa dois de seus pontos, quais sejam (1 : 0 : 0) e
(0 : 1 : 0).
Iremos supor que a colineação ψ está sob às condições descritas acima. Sendo
assim, ψ aplica biunivocamente o plano afim no plano afim. Isto permite definir
uma aplicação B : R2 → R2 via identificação afim, estabelecendo que
B(x, y) é tal que (B(x, y) : 1) = ψ(x : y : 1).
Como
◦ ψ é uma aplicação biunı́voca do plano afim que aplica retas afins em retas
afins,
◦ a identificação afim aplica retas Euclidianas do R2 em retas afins e
◦ como (B(0, 0) : 1) = ψ(0 : 0 : 1) = (0 : 0 : 1),
110
CAPÍTULO 11. COLINEAÇÃO
é imediato concluir que
◦ B aplica retas Euclidianas em retas Euclidianas,
◦ B fixa a origem o ∈ R2
◦ e B é biunı́voca.
Portanto, B : R2 → R2 é um operador linear invertı́vel. Considere o operador linear
invertı́vel A : R3 → R3 , definido por A(x, y, z) = (B(x, y), z). Ficará aos cuidados
2
do leitor mostrar que ψ = A.
Exercı́cios propostos 11.3
1. Mostre as afirmações
(a) Toda colineação tem um ponto fixo.
(b) Se uma colineação fixa quatro pontos ela é a identidade.
(c) Existem colineações que fixam os pontos e1 , e2 e e3 mas que não são a identidade.
2. Demonstre o seguinte teorema para n = 3 e depois use indução para o caso geral.
Teorema Seja B : Rn → Rn uma aplicação biunı́voca tal que B(o) = o. Se B aplica
hiperplanos em hiperplanos então B é um operador linear invertı́vel.
11.4
Teorema de Papus
Para falar sobre triângulos, quadriláteros, pentágonos e outros polı́gonos no plano
projetivo precisamos definir o significado destes termos que têm suas origens na
Geometria Euclidiana plana. Por exemplo, um quadrilátero em RP2 é um polı́gono
projetivo obtido de um quadrilátero do plano Euclidiano, via identificação afim,
seguido de uma colineação. Transportamos juntos os significados de vértice, lados,
está inscrito, etc.
O objetivo do restante do capı́tulo é demonstrar dois dos mais antigos teoremas
da geometria projetiva, o teorema de Papus e o teorema de Desargues. Expliquemos
o teorema de Papus no plano Euclidiano. Para facilitar a leitura, ao denotar uma
reta no plano Euclidiano determinada pelos pontos A e B, escreveremos lAB .
11.4. TEOREMA DE PAPUS
111
Acompanhe o enunciado graficamente.
Sejam l e s duas retas
quaisquer no plano Euclidiano.
Escolhamos seis pontos distintos,
três pontos sobre a primeira reta,
digamos, U , V e W , e três sobre a
outra reta, U , V e W . Considere os
pontos
A = lV W ∩ lV W ,
B = lU W ∩ lU W ,
C = lU V ∩ lU V .
O teorema de Papus afirma que A, B e C são colineares.
Transportaremos o teorema de Papus da Geometria Euclidiana para uma linguagem projetiva utilizando a identificação afim. Como o número de retas envolvidas
no problema é grande e não temos muitas letras gregas apropriadas para designálas, fixaremos uma notação. Dados os pontos projetivos distintos u e v denotamos
a reta projetiva que contém u e v, por η uv = u × v.
Teorema 11.4.1 (Teorema de Papus) Sejam u, v, w, u , v e w seis pontos
projetivos distintos, dos quais os três primeiros estão sobre uma reta rη e os três
últimos fora desta reta e sobre uma outra reta rν . Então os pontos de interseção
a = rηvw ∩ rηv w ,
b = rηuw ∩ rηu w ,
c = rηuv ∩ rηu v ,
são pontos colineares1 .
Prova As hipóteses implicam que u, v , w e b são não colineares três a três. Sendo
assim, a menos de uma colineação, podemos supor que
u = (1 : 0 : 0),
v = (0 : 1 : 0),
w = (0 : 0 : 1),
b = (1 : 1 : 1).
Afirmação 1 Sendo v colinear com u e w, podemos escolher
v = (β, 0, 1)
com β = 0.
Senão vejamos. Como u = (1, 0, 0) e w = (0, 0, 1) pertencem ao plano Γe2 e v
é colinear com u e w e são distintos, então qualquer representante de v é da forma
v = (s, 0, t), com s = 0 e t = 0. Logo, podemos tomar v = t(s/t, 0, 1). O vetor
(s/t, 0, 1) também será um representante de v. Façamos β = st .
Afirmação 2 Sendo u colinear com w e b, podemos escolher
u = (1, 1, α )
1
com α = 0.
A reta projetiva contendo tais pontos é chamada de reta de Papus.
112
CAPÍTULO 11. COLINEAÇÃO
Seja u = (s, t, r) um representate de u. Pelo critério de colinearidade temos
t − s = det[w, b, u ] = 0.
Logo, s = t. Devemos ter s = 0, caso contrário u = (0 : 0 : α ) = w, uma contradição pois os pontos considerados são distintos. Concluı́mos que u = (s, s, r) =
s (1, 1, r/s). Façamos α = r/s.
Afirmação 3 Sendo w colinear com u e b, podemos escolher
w = (γ , 1, 1)
com γ = 0.
A demonstração é semelhante à demonstração da afirmação anterior.
Continuemos. Os pontos u , v e w estão sobre a reta projetiva rν , portanto,
pelo critério de colinearidade temos a seguinte relação entre os coeficientes α e γ ,
1 0 γ
0 = det[u , v , w ] = det 1 1 1 = 1 − α γ .
α 0 1
Guardemos esta relação. Calculemos agora os pontos de interseção das retas projetivas. Sabendo que b = (1 : 1 : 1), precisamos calcular
a = ηvw × ηv w ,
c = ηuv × ηu v .
Levando em conta as representações obtemos
ηvw = v × w = (−1, −β + γ , β),
ηv w = v × w = (1, 0, 0),
ηuv = u × v = (0, 0, 1),
ηu v = u × v = (1, α β − 1, −β).
Finalmente, calculando os pontos as interseções,
a = (0, β, β − γ ) ,
verifiquemos que os pontos
0
det[a, b, c] = β
β − γ
c = (−α β + 1, 1, 0),
são colineares pois
1 −α β + 1
= β − α βγ = β(1 − α γ ) = 0.
1
1
1
0
Exercı́cios propostos 11.4
1. Verifique o teorema de Papus para os pontos dados.
a)
b)
c)
u
u
u
u
u
u
= (1 : −1 : 0),
= (1 : −1 : 1),
= (1 : 0 : −1),
= (1 : 1 : 0),
= (2 : 1 : −1),
= (1 : 1 : 1),
v
v
v
v
v
v
= (1 : 1 : 2),
= (2 : −2 : 1),
= (1 : 1 : −2),
= (1 : 3 : 1),
= (0 : 1 : 1),
= (0 : 2 : 1),
w
w
w
w
w
w
= ( 0 : 1 : 1),
= (−1 : 1 : 1).
= (5 : 2 : 3),
= (0 : 2 : 1).
= (1 : 2 : 1),
= (1 : 3 : 2).
2
11.5. TEOREMA DE DESARGUES
2. Considere as retas Euclidianas
113
l1 : y = x
.
l2 : y = 2x − 3
Escolhidos os pontos sobre a reta l1 , A(1,1), B(2, 2) e C(3, 3), e os pontos sobre a reta
l2 , A (1, −1), B (2, 1) e C (6, 3), determine as coordenadas das interseções P , Q e R
e mostre que são pontos colineares, onde
Q = lAC ∩ lA C ,
R = lBC ∩ lB C .
P = lAB ∩ lA B ,
3. Coloque o problema em linguagem projetiva e prove-o. Sejam A, B e C pontos
distintos sobre uma reta l e A , B e C pontos distintos sobre outra reta l = l de
maneira que nenhum destes pontos estão na interseção l ∩ l . Se as retas lAA , lBB ,
lCC são coincidentes em P , então a reta de Papus é concorrente com l e l .
11.5
Teorema de Desargues
O Teorema de Desargues diz respeito a triângulos em perspectiva. Acompanhe na
figura o enunciado. Considere o plano contendo o triângulo com vértices u, v e w.
Vamos assumir que posicionado em O exista um ponto de luz e que o triângulo seja
opaco. O triângulo projeta uma sombra sobre um outro plano determinando um
triângulo cujos vértices são u , v e w .
O Teorema de Desargues afirma que os lados correspondentes do triângulo e de sua
sombra concorrem na reta interseção dos
dois planos. Com isto, fica descrita uma
propriedade básica da perspectiva, ao estabelecer uma técnica fundamental para
desenhos, onde a realidade visual é registrada graficamente sobre uma superfı́cie
plana. Transcrevamos todas estes fatos
fı́sicos num teorema com linguagem projetiva.
Teorema 11.5.1 (Teorema de Desargues) Seja ∆ = {u, v, w} um conjunto de
três pontos projetivos distintos e não colineares e seja ∆ = {u , v , w } outro conjunto de três pontos projetivos distintos e não colineares tais que ∆ ∩ ∆ = { } e
que
{p} = rηuu ∩ rηvv ∩ rηww .
Então os pontos projetivos a, b e c são colineares,2 em que
a = rηvw ∩ rηv w ,
2
b = rηuw ∩ rηu w ,
A reta projetiva assim definida é a reta de Desargues.
c = rηuv ∩ rηu v .
114
CAPÍTULO 11. COLINEAÇÃO
Prova Assuma que os pontos projetivos u , v , w e p são não colineares três a três
(o caso contrário é trivial). A menos de uma colineação, podemos simplificar os
cálculos assumindo que
u = e1 ,
v = e2 ,
w = e3 ,
p = (1 : 1 : 1).
Afirmação 1 Existem números reais α, β e γ diferentes de zero tais que os pontos
u, v e w podem ser representados por
u = (1 + α, 1, 1),
v = (1, 1 + β, 1)
e
w = (1, 1, 1 + γ).
Demonstraremos apenas a existência de α, as outras igualdades têm demonstrações semelhantes. Os pontos p, u e u são colineares e distintos em RP2 , implicando que todos pertencem a um mesmo plano perfurado em R3 e dois deles,
digamos, p e u , são linearmente independentes. Logo, u = sp + tu , para algum
s = 0 e t = 0. Como
u = sp + tu = s(p + st u ),
façamos α = st .
Afirmação 2 Os pontos projetivos η vw , η uw e η uv são
η uv = (−β : −α : (1 + α)(1 + β) − 1),
η uw = (+γ : 1 − (1 + α)(1 + γ) : +α),
η vw = ((1 + β)(1 + γ) − 1 : −γ : −β).
A demonstração é um cálculo direto.
Afirmação 3 Os pontos projetivos a, b e c podem ser representados por
b = (α, 0, −γ),
a = (0, β, γ),
Finalizando. O cálculo
c = (−γ, β, 0).
0 α −α
det[a, b, c] = det β 0
β = βγα − αβγ = 0,
γ −γ 0
mostra que os três pontos são colineares.
2
Exercı́cios propostos 11.5
1. Sejam u = (1 : 0 : 1), v = (1 : 2 : 2), w = (−1 : 1 : 1), u , v e w pontos tais que as
retas projetivas rη uu , rη vv e rηww são concorrentes em p = (0 : 0 : 6). Determine
representantes para u , v e w sabendo-se que eles são pontos ideais e estão na reta
de Desargues.
Capı́tulo 12
Cônicas
A interseção de um cone cujo vértice
é a origem do R3 e o plano horizontal com equação z = 1 produz uma
das três curvas clássicas denominadas de cônicas: elipse, parábola ou
hipérbole. Estamos interessados em
estudar tais curvas, mas não com a finalidade de determinar seus eixos, focos, assı́ntotas, etc. ou suas propriedades métricas como, por exemplo, as
razões entre as distâncias de pontos
aos focos e diretrizes, estudo feito nos
últimos anos do Ensino Médio. Existem belos resultados, como o Teorema
de Pascal, exibindo propriedades não métricas das cônicas e que dependem apenas
do conceito de incidência. Toda a força da Geometria Projetiva surge ao demonstrarmos estes teoremas, certamente, um dos pontos altos da teoria.
12.1
Cones em R3
Em algum momento da nossa vida de estudante, seja quando estudamos Cálculo na
Universidade ou Geometria Analı́tica no Ensino Médio, ouvimos ou lemos a frase
”x2 + y 2 − z 2 = 0 é a equação de um cone em R3 .”
De fato, ao registramos graficamente o conjunto dos pontos v = (x, y, z) ∈ R3 cujas
coordenadas satisfazem a equação obtemos uma figura que entendemos como sendo
um cone com vértice na origem.
Aquela equação possui uma propriedade que nos induz a pensar no plano proje-
116
CAPÍTULO 12. CÔNICAS
tivo. Se v = (x, y, z) ∈ , então, escolhido qualquer λ ∈ R, o vetor λv = (λx, λy, λz)
também pertence ao cone pois suas coordenadas satisfazem à equação que define
! Logo, faz sentido considerá-la como uma equação em coordenadas homogêneas
e estudar o conjunto C formado pelos pontos projetivos v = (x : y : z) ∈ RP2 cujas
coordenadas satisfazem a equação, isto é,
C : x2 + y 2 − z 2 = 0.
Devemos examinar com mais vagar este conjunto. Uma equação em coordenadas
homogêneas é, obviamente, chamada de equação homogênea.
Uma cônica em R2 é a curva obtida pelo transporte via identificação afim da
curva interseção de um cone e o plano horizontal Γe3 (0, 0, 1) : z = 1. A projeção
de um cone (menos seu vértice que sempre assumiremos ser o) no plano projetivo é
uma curva também denominada cônica em RP2 .
No caso da interseção do cone : x2 +y 2 −z 2 = 0 e o plano horizontal produzimos
a equação x2 + y 2 − 1 = 0 em R2 que reconhecemos como sendo a equação do cı́rculo
unitário canônico em R2 . Cı́rculo é um tipo particular de elipse.
A técnica principal é estabelecer uma relação entre equações homogêneas de
grau 2 com Álgebra Linear, disciplina que, geralmente, trata de equações lineares,
de grau 1. Embora não seja um relação que possa ser imaginada de imediato, ela é
simples. Exemplifiquemos com o cone acima.
Considere o operador linear A : R3 → R3 , definido por A(x, y, z) = (x, y, −z).
Sua matriz canônica é a matriz diagonal, portanto, simétrica,
1 0
0
[A] = 0 1
0 .
0 0 −1
Seja v = (x, y, z) ∈ R3 . O leitor pode verificar que o cone fica definido por
: v, A(v) = 0.
Passemos ao plano projetivo. O operador linear A, sendo invertı́vel, induz uma
colineação A no plano projetivo, mas a equação v, A(v) = 0 é a equação de
incidência entre o ponto projetivo v ∈ RP2 e uma reta projetiva rη ⊂ RP2 , isto
é, e a reta projetiva A(v) = η ∈ RP2∗ . Sendo assim, é mais natural aceitar que o
operador linear induz uma aplicação entre o plano projetivo e seu dual,
A∗ : RP2 → RP2∗ ,
A∗ (x : y : z) = (x : y : −z),
pois o plano projetivo e seu dual são ”os mesmos”. Logo,
a cônica em RP2 obtida pela projeção de um cone em R3 é o conjunto
dos pontos projetivos v tais que v e a reta projetiva A∗ (v) são incidentes.
12.1. CONES EM R3
117
Uma pergunta se impõe imediatamente. Qual o significado da reta projetiva η = A∗ (v) ∈ RP2∗ ?
Algebricamente a resposta é fácil. A
reta projetiva rA∗ (v) é obtida pela
projeção do plano perfurado em R3
cujo vetor normal é η = A(v). Na
nossa notação, é a reta projetiva obtida pela projeção do plano perfurado
ΓA(v) .
A resposta geométrica é crucial para o estudo das propriedades de cônicas que
envolvam apenas o conceito de incidência. O plano ΓA(v) é o plano tangente ao
cone no ponto v! Examinemos esta afirmação. Primeiro, observe que v ∈ ΓA(v)
pois v, A(v) = 0. Segundo, a reta λv também pertence ao mesmo plano e ao
cone. Resta mostrar que esta reta é a precisamente a interseção do plano e o cone.
Deixaremos a demonstração deste fato para depois.
Em resumo. Além de obtermos uma curva em RP2 , isto é, o conjunto de pontos
projetivos v = (x : y : z) que satisfazem à equação x2 + y 2 − z 2 = 0, também
obtemos a reta projetiva tangente no ponto v, qual seja, η = A∗ (v) = (x : y : −z).
Precisamos transportar todas as informações para o R2 pois, afinal, desejamos
estudar cônicas no plano. A tarefa é simples via identificação afim. Por exemplo, o
ponto
v = (3 : 4 : 5) = 35 : 45 : 1
pertence à cônica C do plano projetivo definida pela equação homogênea (ordem 2)
x2 + y 2 − z 2 = 0. A reta projetiva tangente à cônica no ponto v é
A(v) = η = (3 : 4 : −5).
Pela identificação afim,
◦ obtemos a equação do cı́rculo unitário canônico em R2 , x2 + y 2 − 1 = 0
(considerando z = 1),
◦ o ponto p = ( 35 , 45 ) pertence ao cı́rculo unitário
◦ e a reta Euclidiana l : 3x + 4y − 5 = 0 é a reta tangente ao cı́rculo no ponto p.
Mas tudo isso é pouco diante do que vai ser dito.
Exercı́cios propostos 12.1
118
CAPÍTULO 12. CÔNICAS
1. Identifique quais equações em três variáveis são homogêneas e determine a ordem de
homogeneidade.
a) x2 − xz + y 2 = 0. b) x2 − y + z 2 = 0. c) xy + xz + yz = 0.
f) xyz = 0.
d) x3 − y 2 + z 2 = 0. e) x2 + y 2 = 0.
2. Considere a curva obtida pela interseção do cone ⊂ R3 com o plano Γ : z = 1.
Transporte a curva obtida via identificação afim para o plano Cartesiano, faça seu
esboço e identifique a cônica obtida.
a) : x2 − y 2 + z 2 = 0.
b) : x2 − yz = 0.
2
c) : x + 2xz + yz = 0. d) : 4x2 + 9y 2 − z 2 = 0.
e) : xz + y 2 = 0.
f) : xy − z 2 = 0.
12.2
Quádricas
Esta seção é dedicada a organizar os cometários postos na seção anterior. Iremos
estudar equações polinomiais homogêneas de ordem 2 em R3 , ou formas quadráticas,
ax2 + bx2 + cz 2 + dxy + exz + f yz = 0.
Inicialmente estaremos interessados no conjunto solução, isto é, nos pontos v =
(x, y, z) ∈ R3 cujas coordenadas satisfazem a equação. O conjunto solução é chamado de quádrica. Posteriormente, estudaremos o conjunto de pontos projetivo
v = (x : y : z) ∈ RP2 cujas coordenadas homogêneas satisfazem à mesma equação,
isto é, estudaremos as cônicas. A homogeneidade da equação permite este estudo.
Um operador linear associado àquela equação é um operador linear simétrico
A : R3 → R3 , tal que
v, A(v) = ax2 + bx2 + cz 2 + dxy + exz + f yz,
em que v = (x, y, z) ∈ R3 . A matriz simétrica associada à equação é a matriz
do operador linear A na base canônica, [A] = [A(e1 ), A(e2 ), A(e3 )]. Demonstre
a proposição abaixo, ela estabelece um algoritmo relacionando os coeficientes da
equação e as entradas da matriz [A].
Proposição 12.2.1 Dada uma equação polinomial homogênea de ordem 2 em R3 ,
ax2 + bx2 + cz 2 + dxy + exz + f yz = 0, existe um único operador linear simétrico
A : R3 → R3 associado à equação, a saber, é o operador cuja matriz canônica é
a d/2 e/2
[A] = d/2
b f /2 .
e/2 f /2 c
Exemplo 12.2.1 Pela proposição, a equação 7x2 + y 2 − 2xy + 5xz − 4yz = 0 é
reescrita na forma v, A(v) = 0, em que A : R3 → R3 é o operador linear simétrico
cuja matriz canônica é
12.2. QUÁDRICAS
119
7 −1 5/2
[A] = −1
1 −2 .
5/2 −2
0
2
Exemplo 12.2.2 O operador linear simétrico associado à equação x2 + y 2 + z 2 = 0
é a identidade Id do R3 . O único vetor v = (x, y, z) ∈ R3 que satisfazem a condição
2
v, Id(v) = 0 = x2 + y 2 + z 2 é o vetor nulo.
O exemplo acima nos diz um pouco mais. Um operador linear simétrico com
todos os autovalores positivos é dito ser positivo. Em Álgebra Linear, é mostrado
que, neste caso, vale a condição v, A(v) > 0 para todo vetor não nulo v. Logo, um
operador linear simétrico positivo produz uma quádrica (degenerada) que reduz-se
a um ponto, a origem. Fato similar ocorre com um operador simétrico com todos
autovalores negativos, vale a inequação v, A(v) < 0 para todo vetor v = o. Portanto, a quádrica correspondente também reduz-se a um ponto. Não estudaremos
quádrica cujo operador associado tem todos os autovalores com o mesmo sinal.
Devido a naturalidade da relação entre um operador linear e sua matriz na base
canônica, iremos nos referir a autovalores, a autovetores, a quádrica determinada
por uma matriz em lugar de empregar estes termos a operadores lineares.
Exemplo 12.2.3 Devemos fazer mais restrições sobre o tipo de equação que devemos analisar. Considere o conjunto dos pontos v = (x, y, z) ∈ R3 cujas coordenadas
satisfazem a equação homogênea x2 − y 2 = 0. Com uma manipulação algébrica simples obtemos a decomposição (x+y)(x−y) = 0. A quádrica correspondente em R3 é
a união de dois planos. Evidentemente, qualquer pessoa de bom senso não vê forma
de cone alguma num esboço das soluções. Os matemáticos idem. Mas o privilégio
compensatório é poder detetar algebricamente o fenômeno. Para isso, é suficiente
examinar os autovalores do operador linear cuja matriz simétrica associada é
1 0 0
[A] = 0 1 0 .
0 0 0
Os autovalores são λ1 = 1, λ2 = 1 e λ3 = 0. O autovalor zero provoca a degenerecência da quádrica, estamos examinando uma quádrica degenerada. Excluiremos
estes casos patológicos do nosso estudo.
2
Tendo em vista os comentários acima, iremos estudar formas quadráticas provenientes de operadores lineares A de R3 satisfazendo as seguintes condições:
◦ eles são simétricos;
120
CAPÍTULO 12. CÔNICAS
◦ seus autovalores são distintos de zero (A é invertı́vel);
◦ os autovalores não têm o mesmo sinal.
O conjunto solução A em R3 da forma quadrática cujo operador linear associado
está sob as condições acima é chamado de cone em R3 e, pelo visto, sua definição
utilizando a condição de incidência é
A = {v ∈ R3 ; v, A(v) = 0}.
Nos ocuparemos somente destes casos. A interseção do cone A com o plano
Γe3 : z = 1, produz três tipos de curvas em R2 , via identificação afim, chamadas de
cônicas: elipse, parábola e hipérbole.
Exemplo 12.2.4 Pelo algoritmo construido no
1 −1 1
inı́cio desta seção, a matriz simétrica ao lado define
[A] = −1
1 1 .
1
1 2
o cone A : x2 − 2xy + y 2 + 2xz + 2yz + 2z 2 = 0.
Se desejarmos utilizar a linguagem de operadores lineares, consideramos o operador linear A : R3 → R3 , A(x, y, z) = (x − y + z, −x + y + z, x + y + 2z), e definimos
o cone pela equação de incidência, A : v, A(v) = 0.
De
√ é um cone pois seus autovalores são λ1 = 2 > 0, λ2 =
√ fato, esta quádrica
1 + 12 > 0 e λ3 = 1 − 12 < 0.
A cônica obtida em R2 via identificação afim (z = 1) tem equação C : x2 − 2xy +
+ 2x + 2y + 2 = 0. Logo adiante, teremos condições de saber qual é o tipo de
cônica: elipse, parábola ou uma hipérbole.
2
y2
O fato que permite estudar estas curvas planas no plano projetivo é a seguinte
propriedade do cone A . Se λ = 0 e v ∈ A ⊂ R3 então, λv ∈ A pois
λv, A(λv) = λ2 v, A(v) = 0.
Portanto, a projeção Ψ : R3 /{o} → RP2 , Ψ(v) = v, aplica o cone A (menos
a origem) numa curva sobre o plano projetivo, chamado de cônica projetiva, ou
simplesmente, cônica. Como veremos logo a seguir, o plano projetivo é o espaço
mais apropriado para estudar as cônicas.
Exercı́cios propostos 12.2
1. Mostre que o determinante de uma matriz 3 × 3 é igual a zero se, e somente se, existe
um autovalor igual a zero.
2. Para cada equação homogênea de ordem 2 determine um operador linear A : R3 → R3
e reescreva a equação com a condição de incidência v, A(v) = 0.
a) x2 − 3y 2 + z 2 = 0.
b) 4x2 + 2y − z 2 = 0. c) −3x2 + y 2 + 4z 2 = 0.
d) 2xy − 2xz + 2yz = 0. e) 6x2 − yz = 0.
f) (x − z)2 = 0.
12.3. CORRELAÇÕES
12.3
121
Correlações
Como feito anteriormente, o conjunto das retas projetivas RP2∗ foi identificado com
o plano projetivo RP2 . Desejamos estudar as aplicações bijetivas ρ : RP2 → RP2∗
que preservam colinearidade, isto é, três pontos projetivos colineares são aplicados
em três retas projetivas concorrentes. Tais aplicações e suas inversas são chamadas
de correlações.
Nada impede que dado um operador linear invertı́vel A : R3 → R3 possamos
definir uma aplicação A∗ : RP2 → RP2∗ , pela qual associamos um ponto projetivo v
a uma reta projetiva r pois o contra domı́nio é ”um plano projetivo”. A utilização
do asterisco nesta notação tem o objetivo de distingüi-la de colineação, aplicação
definida e estudada no capı́tulo anterior, cujo domı́nio e contradomı́nio é o plano
projetivo. Aqui o contradomı́nio é o plano projetivo dual.
Exemplo 12.3.1 O operador linear A de R3 cuja matriz canônica é
0 1
0
[A] = 1 0
1
0 1 −1
é invertı́vel pois det[A] = 0. Em termos de coordenadas homogêneas ele define a
aplicação A∗ : RP2 → RP2∗ ,
A∗ (x : y : z) = (y : x + z : y − z).
Por exemplo, o ponto projetivo v = (1 : 1 : 3) é aplicado na reta projetiva rη , onde
η = (1 : 4 : −2). A inversa de A∗ é a aplicação A∗ : RP2∗ → RP2 (o asterisco é
colocado na posição inferior),
A∗ (v) = A−1 (v).
Para explicitar a aplicação precisamos saber a matriz inversa de [A],
−1 1
1
0 .
[A]−1 = 1 0
1 0 −1
Sendo assim, A∗ (x : y : z) = (−x + y + z : x : x − z). A reta projetiva η = (2, −1, 3)
2
é aplicada no ponto projetivo v = (−3 : 2 : −1).
De fato, um operador linear invertı́vel de R3 induz uma correlação.
Proposição 12.3.1 Seja A um operador linear invertı́vel em R3 . Os pontos projetivos u, v, w ∈ RP2 são colineares, se e somente se, as retas projetivas A∗ (u), A∗ (v),
A∗ (w) ∈ RP2∗ são concorrentes.
122
CAPÍTULO 12. CÔNICAS
Prova A colinearidade e a concorrência estão relacionadas por
det[A(u), A(v), A(w)] = det ([A][u, v, w]) = det[A] det[u, v, w].
Sendo assim, det[u, v, w] = 0, se, e somente se, det[A(u), A(v), A(w)] = 0.
2
Deixamos ao leitor o trabalho de enunciar e provar o resultado similar para a
inversa A∗ da correlação A∗ . Pelo Teorema Fundamental da Geometria Projetiva,
toda correlação é deste tipo, isto é,
cada correlação é induzida por um operador linear invertı́vel de R3 e este operador é único a menos de uma multiplicação por um escalar diferente de zero.
Iniciaremos a apresentação deste ponto, temos em mãos um operador linear
invertı́vel A : R3 → R3 . A correlação induzida por A é a aplicação denotada e
definida por
A∗ : RP2 → RP2∗ ,
A∗ (v) = A(v).
Para recordar, a notação A∗ (v) e rA∗ (v) têm o mesmo significado, indicam uma
mesma reta projetiva. Por tudo que vimos, podemos afirmar que a inversa da
correlação induzida por A é a correlação induzida pelo operador A−1 , ou seja,
A∗ : RP2∗ → RP2 ,
12.4
A∗ (η) = A−1 (η).
Polaridades
Uma correlação é uma polaridade se sua matriz é simétrica. Para uma redação mais
precisa é conveniente nomear os dois tipos de correlações. Uma aplicação polar é
uma correlação simétrica
A∗ : RP2 → RP2∗ ,
e uma aplicação pólo é uma correlação simétrica
A∗ : RP2∗ → RP2 .
Uma propriedade relevante de operadores simétricos invertı́veis é que seu operador inverso também é simétrico e [A−1 ]t = [A−1 ]. Portanto, a inversa de uma
polaridade é uma polaridade. Ao utilizarmos os termos ”a polaridade definida pelo
operador A” fica subentendido que são as duas aplicações, polar e pólo, como definidas acima. Temos a seguinte conseqüência deste fato.
Proposição 12.4.1 Polaridade preserva incidência: v ∈ rη ⇔ A∗ (η) ∈ rA∗ (v) .
Prova Examinemos as equações de incidência
t
A−1 (η), A(v) = η, A−1 ◦ A(v) = η, A−1 ◦ A(v) = η, v = v, η.
12.4. POLARIDADES
123
O membro esquerdo é igual a zero se, e somente se, o membro direito o é.
A∗
2
Sejam
: RP → RP e A∗ : RP → RP as aplicações polar e pólo, respectivamente, associadas a um operador linear simétrico invertı́vel A do R3 .
2
2∗
2∗
2
• Quando v ∈ rA∗ (v) diremos que o ponto projetivo v é autoconjugado. Observe
que a condição de ser autoconjugado é expressa algebricamente pela equação
de incidência v, A(v) = 0. Em outras palavras, v pertence ao seu polar.
• Quando A∗ (η) ∈ rη diremos que a reta projetiva η é autoconjugada. Da mesma
forma, a condição de ser autoconjugada é expressa pela equação de incidência
A−1 (η), η = 0. Uma reta projetiva é autoconjugada se ela incide em seu
pólo.
Proposição 12.4.2 Uma reta projetiva rη contém no máximo dois pontos autoconjugados associados a uma aplicação polar A∗ : RP2 → RP2∗ .
Prova Sejam v e w dois pontos autoconjugados e distintos sobre a reta rη . Assim
sendo, rA∗ (v) e rA∗ (w) são retas distintas e qualquer ponto do plano Γη ⊂ R3 é uma
combinação linear dos dois vetores v e w. Portanto, os pontos da reta projetiva rη
são expressos na forma
u = sv + tw,
onde s e t são números reais não nulos simultaneamente.
Pela equação de autoconjugação temos que v, A(v) = 0 = w, A(w). Vamos
supor, por absurdo, que u0 = s0 v + t0 w seja um outro ponto autoconjugado em rη .
Expressemos algebricamente a condição deste ponto ser autoconjugado. Utilizando
a bilinearidade do produto interno e a simetria, A = At ,
0 = u0 , A(u0 )
= s20 v, A(v) + 2s0 t0 v, A(w) + t20 w, A(w)
= 2s0 t0 v, A(w).
Como s0 = 0 e t0 = 0 então v, A(w) = 0, significando que v ∈ rA∗ (w) . Mas v é
autoconjugado, então v ∈ rA∗ (v) , implicando que
v ∈ rA∗ (w) ∩ rA∗ (v) .
Pelo fato de A ser simétrica também temos w, A(v) = 0, significando que w ∈
rA∗ (v) . Novamente, pelo mesmo argumento de autoconjugação, concluı́mos que
w ∈ rA∗ (v) ∩ rA∗ (w) .
Mas duas retas projetivas incidem num único ponto. Logo, v = w, uma contradição
pois estávamos assumindo que eles eram distintos. Pelo visto, não existe um terceiro
2
ponto autoconjugado na reta projetiva rη .
124
CAPÍTULO 12. CÔNICAS
Exercı́cios propostos 12.3
1. Determine matricialmente todas as aplicações polares A∗ : RP2 → RP2∗ tais que os
pontos e1 , e2 , e3 , u = (1 : 1 : 1) e v = (1 : 1 : 0) sejam autoconjugados.
a b c
3
3
3
2. Sabendo-se que a + b + c > 3abc mostre que
[A] = b c a .
a matriz ao lado determina uma polaridade.
c a b
3. Uma aplicação polar A∗ : RP2 → RP2∗ possui pontos autoconjugados se, e somente
se, os autovalores da matriz [A] não têm o mesmo sinal.
12.5
Cônicas em RP2
Uma cônica em RP2 definida por uma aplicação polar A∗ : RP2 → RP2∗ é o conjunto
formado pelos pontos que pertencem ao seu polar. Mais precisamente.
Definição 12.5.1 A cônica determinada pela aplicação polar A∗ : RP2 → RP2∗ é
o conjunto definido e denotado por
CA = {v ∈ RP2 ; v, A(v) = 0}.
A partir deste ponto passaremos a supor que a cônica não é vazia nem degenerada. Isso significa que os autovalores do operador linear invertı́vel e simétrico
A : R3 → R3 não possuem o mesmo sinal.
Numa definição mais técnica poderı́amos dizer que a cônica CA é o conjunto dos
pontos projetivos autoconjugados em relação a aplicação polar A∗ . Ou, a cônica é
o conjunto dos pontos que satisfazem a condição v ∈ rA∗ (v) . Observamos que na
definição de cônica o conjunto CA não depende do representante do ponto projetivo
tomado, pois se v, A(v) = 0 e λ = 0 então λv, A(λv) = λ2 v, A(v) = 0.
Exemplo 12.5.1 Considere a matriz simétrica
1 −1 1
[A] = −1
1 1 .
1
1 2
A matriz [A] define um operador linear A em R3 e este por sua vez induz uma
correlação A∗ : RP2 → RP2∗ desde que o determinante de [A] não é nulo. A∗ é uma
aplicação polar e define uma cônica em RP2 . Esta informação está registrada no
polinômio caracterı́stico de A, p(λ), pois
√ não iguais a zero e não têm
√ as raı́zes são
o mesmo sinal, p(λ) = (λ − 2)(λ − 1 + 3)(λ − 1 − 3). A equação homogênea da
cônica CA no plano projetivo é calculada por v, A(v) = 0, sendo assim,
12.5. CÔNICAS EM RP2
125
CA : x2 − 2xy + 2xz + y 2 + 2yz + 2z 2 = 0.
Pergunta. Quais dos pontos projetivos v = (−1 : 1 : 1) e w = (1 : 1 : 1)
2
pertencem à cônica CA ?
Uma cônica é classificada em três tipos, dependendo da sua interseção com a
reta ideal. Diz-se que uma cônica CA é:
♦ uma elipse, se CA não intercepta I∞ ;
♦ uma parábola, se CA intercepta I∞ num único ponto;
♦ uma hipérbole, se CA intercepta I∞ em dois pontos.
Estas são as três possibilidades para a interseção com a reta ideal pois, como
vimos na última proposição da seção anterior, uma reta projetiva possui no máximo
dois pontos autoconjugados.
Exemplo 12.5.2 Examinemos a equação homogênea x2 −2xy +2xz +y 2 +2yz = 0.
A matriz simétrica associada [A] define um operador linear A em R3 cujo polinômio
caracterı́stico possui três raı́zes reais não nulas e nem todas têm o mesmo sinal,
√
√
p(λ) = (λ − 2)(λ − 2)(λ + 2).
O operador induz uma aplicação polar e a equação dada é a equação de autoconjugação de um ponto projetivo v = (x : y : z). Verifiquemos se a cônica tem ponto
ideal. Seja v = (x : y : 0). Substituindo na equação obtemos as igualdades
0 = x2 − 2xy + y 2 = (x − y)2 .
Portanto, a única interseção da cônica com a reta ideal é o ponto v = (x : x : 0) =
(1 : 1 : 0). A cônica CA é uma parábola.
Agora, os pontos (x, y) ∈ R2 tais que (x : y : 1) ∈ CA devem satisfazer a equação
x2 − 2xy + 2x + y 2 + 2y = 0.
Esta é a equação de uma parábola em R2 .
2
Exemplo 12.5.3 Consideremos a matriz simétrica
1 −1
3
[A] = −1
1
5 .
3
5 −2
Como o determinante da matriz é diferente de zero, podemos garantir que [A] define
uma correlação A∗ : RP2 → RP2∗ ,
A(x : y : z) = (x − y + 3z : −x + y + 5z : 3x + 5y − 2z).
126
CAPÍTULO 12. CÔNICAS
A condição de autoconjugação, v, A(v) = 0, nos dá a equação homogênea
CA : x2 − 2xy + 6xz + y 2 + 10yz − 2z 2 = 0.
Examinemos a existência de pontos ideais sobre a cônica. Seja v = (x : y : 0).
Substituindo suas coordenadas na equação obtemos
x2 − 2xy + y 2 = (x − y)2 = 0.
Portanto, um ponto ideal v = (x : y : 0) pertence a CA se, e somente se, x = y, ou
seja, CA ∩I∞ = {(1 : 1 : 0)}. Logo, como existe pelo menos um ponto autoconjugado,
CA não é vazio, os autovalores de A não têm o mesmo sinal e A∗ é uma aplicação
polar, isto é, CA é uma parábola.
Quais pontos do (x, y) ∈ R2 que através da identificação com o plano afim
pertence à cônica? Para responder consideramos o ponto v = (x : y : 1) ∈ RP2 e
exigimos que ele pertença à cônica CA , isto é, que suas coordenadas satisfaçam à
equação de incidência. Feito isto obtemos a parábola
x2 − 2xy + 6x + y 2 + 10y − 2 = 0.
2
Exemplo 12.5.4 Consideremos o subconjunto de R2 ,
C : 3x2 − y 2 + 2xy − 1 = 0.
Qual o tipo de cônica em R2 está definida por esta equação homogêna? A resposta
é simples. Consideramos a cônica projetiva
CA : 3x2 − y 2 + 2xy − z 2 = 0.
Aquela primeira equação é obtida desta última via identificação afim. Verificamos
se existe pontos ideais sobre a cônica projetiva,
0 = 3x2 − y 2 + 2xy = 4x2 − (x − y)2 .
Existem dois pontos ideais, a saber,
w1
w2
=
=
(x : −x : 0)
(x : 3x : 0)
=
=
(1 : −1 : 0),
(1 : 3 : 0).
Logo, C : 3x2 − y 2 + 2xy − 1 = 0 hipérbole em R2 .
3
1
0
A matriz simétrica 3 × 3, que define a cônica CA :
[A] = 1 −1
0 .
3x2 − y 2 + 2xy − z 2 = 0 no plano projetivo é dada ao
0
0 −1
lado.
Observe que pelos fatos det[A] = 0 e CA = {v ∈ RP2 ; v, A(v) = 0} não ser
vazio, sabemos que os autovalores da matriz não possuem o mesmo sinal.
2
Exercı́cios propostos 12.4
1. Determine a equação da cônica CA induzida pelo operador linear A cuja matriz na
12.6. RETAS TANGENTES
127
base canônica é dada abaixo.
1
1 0
1 −1 1
−2 3
a) [A] = 1 −1 3 . b) [A] = −1
3 1 . c) [A] = 3 2
0
3 1
1
1 2
−1 1
−1
1 .
3
2. Considere a aplicação polar associada à matriz simétrica
−5 −3
4
2 .
[A] = −3 −1
4
2 −2
a) Dados os pontos projetivos v = (1 : −2 : −1) e w = (1 : 1 : 3) e determine a
reta interseção das retas projetiva A∗ (v) ∩ A∗ (w).
b) Verifique que p = (−1 : − 13 : 1) e q = (−1 : −1 : 1) pertencem à cônica CA .
3. Classifique as cônicas no plano Cartesiano.
a)
c)
12.6
C : x2 − 4xy − 10y 2 = 0.
C : x2 + xy + y 2 − 1 = 0.
b)
d)
C : 6x2 − 3xy − y 2 − 1 = 0.
C : 3x2 − 4y 2 + 24xy − 156 = 0.
Retas tangentes
Sejam A∗ : RP2 → RP2∗ e A∗ : RP2∗ → RP2 as aplicações polar e pólo, respectivamente, induzidas por um operador linear simétrico invertı́vel A do R3 . Assuma que
a aplicação polar define uma cônica CA ⊂ RP2 .
Definição 12.6.1 A cônica dual é o conjunto definido e denotado por
∗ = {η ∈ RP2∗ ; A−1 (η), η = 0}.
CA
Um ponto desta cônica é chamado de reta tangente.
A definição ilustra quão elegante é a teoria de cônicas quando o tratamento é
∗ é, de fato,
feito com a linguagem projetiva. Iremos mostrar que um ponto de CA
uma reta projetiva tangente à cônica CA com o significado de tangência que estamos
habituados. Com a notação já fixada vale a seguinte proposição.
∗.
Proposição 12.6.1 A∗ (CA ) = CA
Prova Merecem registros duas afirmações. A primeira garante que uma reta projetiva η tangente à cônica ”toca” CA em pelo menos um ponto, a saber, A∗ (η).
∗ (tangente à cônica) então A (η) ∈ C . Em particular,
Afirmação 1: Se η ∈ CA
∗
A
A∗ (η) ∈ CA ∩ rη .
128
CAPÍTULO 12. CÔNICAS
Por definição de reta tangente temos que A∗ (η) ∈ rη . Em termos de equação de
incidência podemos escrever A−1 (η), η = 0. Verifiquemos que o ponto projetivo
A∗ (η) = A−1 (η) também pertence à cônica C A ,
A−1 (η), A(A−1 (η) = A−1 (η), η = 0.
Portanto, A∗ (η) ∈ CA ∩ rη .
A segunda afrimação garante que para construir uma (que será única) reta
tangente à cônica no ponto v ∈ CA devemos tomar a reta projetiva A∗ (v).
∗ (tangente à cônica). Em particular,
Afirmação 2: Se v ∈ CA então A∗ (v) ∈ CA
v ∈ CA ∩ rA∗ (v) .
Por definição de cônica, se v ∈ CA então v ∈ rA∗ (v) . Como a aplicação polar e
a aplicação pólo são aplicações inversas uma da outra, temos que A∗ (A∗ (v)) = v ∈
rA∗ (v) . Em outras palavras, a reta projetiva rA∗ (v) é tangente à cônica.
Agora, como A∗ é a inversa de A∗ , a proposição segue facilmente.
2
Caracterizemos geometricamente retas tangentes. Como sabemos do Cálculo,
uma reta tangente a uma cônica em R2 intercepta a cônica num único ponto.
∗.
Proposição 12.6.2 rη ∩ CA = {v} se, e somente se, A∗ (v) = η ∈ CA
∗ . Pelas afirmações estudadas na demonstração da proposição
Prova (⇐) Seja η ∈ CA
acima podemos garantir que A∗ (η) = v ∈ CA ∩rA∗ (v) . Assumamos, por absurdo, que
exista um outro ponto w nesta interseção. Sendo assim, qualquer ponto do plano
ΓA(v) ⊂ R3 é uma combinação linear dos vetores v e w. Portanto, os pontos da reta
projetiva rA∗ (v) são expressos na forma
u = sv + tw,
onde s e t são números reais não nulos simultaneamente.
Levando em conta as equações de autoconjugação v, A(v) = 0 = w, A(w), a
condição de incidência w, A(v) = 0, a bilinearidade do produto interno e a simetria
do operador linear A, avaliemos u, A(u), onde u = sv + tw,
u, A(u) = 2stv, A(w) = 2stw, A(v) = 0.
Como s e t podem ser simultaneamente não nulos, as igualdades acima mostram que
a reta projetiva rA∗ (v) possui infinitos pontos autoconjungados. Uma contradição
pois como sabemos, podem existir no máximo dois pontos autoconjugado sobre uma
reta projetiva. A recı́proca ficará como exercı́cio.
2
Exemplo 12.6.1 Considere a cônica em R2 . C : x2 + xy + y 2 − 1 = 0. Calculemos
a equação da reta tangente à cônica C no ponto p = (1, −1). Como sempre, consideramos a cônica projetiva CA : x2 + xy + y 2 − z 2 = 0. De fato, CA é um conjunto
12.7. CONSTRUINDO CÔNICAS
129
não vazio pois p = (1 : −1 : 1) é um dos seus elementos. Como a aplicação polar
associada é A∗ : RP2 → RP2∗ ,
A∗ (x : y : z) = (x + 12 y : 12 x + y : −z),
a reta tangente rη no ponto p = (1 : −1 : 1) é a reta polar deste ponto,
η = A∗ (p) = ( 12 : − 12 : −1) = (− 12 :
A reta tangente à cônica no
R2
1
2
: 1).
é obtida via identificação afim, l := − 12 x+ 21 y+1 = 0.
A cônica C no R2 é uma elipse pois não existe interção de CA com o reta ideal.
Senão vejamos. Seja v = (x : y : 0). Por substituição temos as igualdades
x2 + xy + y 2 = (x + 12 y)2 + 34 y 2 = 0.
Verifica-se que a única solução seria x = y = 0. Mas não existe ponto projetivo com
todas as coordenadas homogêneas iguais a zero.
2
Exercı́cios propostos 12.5
1. Seja CA a cônica associada à matriz dada ao lado.
√
(a) O ponto p = (2 : −1 : 12 + 32 3) ∈ CA ?
(b) Se p = (2 : −1 : 2), determine os pontos da interseção CA ∩ A∗ (p).
2 −1
3
[A] = −1
1
5 .
3
5 −2
2. Calcule a equação da reta√tangente
à cônica em R2 , C : x2 + xy + y 2 − 1 = 0 nos
√
3
3
pontos p = (−1, 1) e q = ( 3 , 3 ).
3. Sejam A∗ e A∗ as polaridades associadas à matriz
1 −1 1
3 1 .
[A] = −1
1
1 2
a) Determine a equação da cônica CA .
b) Verifique que u = (−1 : − 31 : 1) e v = (−1 : −1 : 1) pertencem à cônica CA e
determine a reta projetiva tangente nestes pontos.
c) Dê a equação da cônica C do plano Cartesiano obtida pela identificação afim e
explicite a equação cartesiana da reta tangente à cônica C no ponto correspondente aos pontos u e v. Identifique C (elipse, parábola, hipérbole).
12.7
Construindo cônicas
Antes de tudo mostremos que uma colineação transforma cônicas em cônicas.
130
CAPÍTULO 12. CÔNICAS
Proposição 12.7.1 Seja CA uma cônica definida pela aplicação polar A∗ : RP2 →
RP2∗ e seja B ∗ : RP2 → RP2 uma colineação. Então B ∗ (CA ) é a cônica definida
t
pela aplicação polar C ∗ : RP2 → RP2∗ , em que [C] = [B −1 ◦ A ◦ B −1 ].
Prova Iremos verificar que o conjunto de pontos projetivos
B ∗ (CA ) = {w ∈ RP2 ; w = B ∗ (v) com v, A(v) = 0}
é igual à cônica
t
CC = {w ∈ RP2 : w, B −1 AB −1 (w) = 0}.
Mostremos a inclusão B ∗ (CA ) ⊂ CC . Seja w ∈ B ∗ (CA ). Por definição, existe um
ponto projetivo v tal que w = B ∗ (v) e satisfazendo a equação v, A(v) = 0. Calculemos
t
t
w, B −1 AB −1 (w) = B(v), B −1 AB −1 (B(v))
= B −1 (B(v)), A(v)
= v, A(v)
= 0.
Logo, w ∈ CC . A demonstração da inclusão oposta é um exercı́cio.
2
Lema 12.7.1 Dados e1 , e2 , e3 , u = (1 : 1 : 1) e v = (v1 : v2 : v3 ) em RP2 . Então
os pontos são três a três não colineares se, e somente se, vi = 0 e vi = vj para
i = j.
Prova Utilizando o critério de não colinearidade entre três pontos temos que
v3 = det [e1 , e2 , v] = 0, v2 = det [e1 , e3 , v] = 0, v1 = det [e2 , e3 , v] = 0.
De modo semelhante,
v3 − v2 = det [e1 , u, v] = 0, v1 − v3 = det [e2 , u, v] = 0, v2 − v1 = det [e3 , u, v] = 0.
Isto termina a demonstração do lema.
2
Proposição 12.7.2 Dados os pontos projetivos e1 , e2 , e3 , u = (1 : 1 : 1) e v =
(v1 : v2 : v3 ). Se eles são três a três não colineares, então existe uma única cônica
CA que passa pelos cinco pontos dados. Mais ainda, a cônica CA é induzida por um
operador linear A do R3 cuja matriz canônica é
0
v3 (v1 − v2 ) v2 (v3 − v1 )
0
v1 (v2 − v3 ) .
[A] = v3 (v1 − v2 )
0
v2 (v3 − v1 ) v1 (v2 − v3 )
12.7. CONSTRUINDO CÔNICAS
Prova Seja
131
a b c
[A] = b d e .
c e f
Para que os pontos e1 , e2 e e3 sejam autoconjugados em relação à aplicação polar
induzida por A as entradas da diagonal da matriz devem ser
a = e1 , A(e1 ) = 0,
De onde segue que
d = e2 , A(e2 ) = 0,
f = e3 , A(e3 ) = 0.
0 b c
[A] = b 0 e .
c e 0
Para que os pontos u = (1 : 1 : 1) e v = (v1 : v2 : v3 ) sejam autoconjugados devemos
ter as seguintes relações entre os coeficientes da matriz,
0 = u, A(u) = b + c + e,
0 = v, A(v) = v1 v2 b + v1 v3 c + v2 v3 e.
Qualquer solução deste sistema pode ser as entradas procurada. É claro que as
soluções estão na interseção dos seguintes subespaços de R3 ,
Γu = {(b, c, e) ∈ R3 : b + c + e = 0},
Γν = {(b, c, e) ∈ R3 : v1 v2 b + v1 v3 c + v2 v3 e = 0}.
O lema anterior e as hipóteses sobre as coordenadas homogêneas de v, implicam que
os subespaços não são os mesmos e que ν = (v1 v2 , v1 v3 , v2 v3 ) não é o vetor nulo.
Logo, as soluções do sistema são os múltiplos de u×ν. Sendo assim, podemos tomar
como entradas da matriz as coordenadas do próprio produto vetorial, ou seja,
b = v3 (v1 − v2 ) ,
c = v2 (v3 − v1 ) ,
e = v1 (v2 − v3 ).
Portanto, um possı́vel operador simétrico que induz uma aplicação polar para a
qual aqueles pontos são autoconjugados tem matriz canônica
0
v3 (v1 − v2 ) v2 (v3 − v1 )
0
v1 (v2 − v3 ) .
[A] = v3 (v1 − v2 )
0
v2 (v3 − v1 ) v1 (v2 − v3 )
Resta provar que tal matriz é invertı́vel. De fato, como os pontos são não colineares,
pelo lema anterior, vi = 0 e vi = vj para todos i = j. Por outro lado, um cálculo
direto mostra que
det A = 2v1 v2 v3 (v1 − v2 ) (v3 − v1 ) (v2 − v3 ) = 0.
A cônica procurada é definida pela aplicação polar determinada por A.
2
132
CAPÍTULO 12. CÔNICAS
Exemplo 12.7.1 Determinemos a equação da cônica que incide nos pontos e1 , e2 ,
e3 , u = (1 : 1 : 1) e v = (−1 : 1 : 2). Pela proposição acima a matriz
0 −4 3
[A] = −4
0 1
3
1 0
induz a aplicação polar A∗ : RP2 → RP2∗ cujo conjunto de pontos autoconjugados
é a cônica procurada. Por um cálculo direto chegamos a CA : −8xy + 6xz + 2yz = 0.
Para determinar qual o tipo de cônica, examinamos a interseção com os pontos
ideais. Mas já conhecemos esta interseção, são os pontos e1 e e2 . Logo, a cônica é
uma hipérbole.
2
Teorema 12.7.1 (Teorema de Papus e Maclaurin) Dados cinco pontos projetivos de maneira que três quaisquer deles são não colineares, então existe uma única
cônica que passa por estes pontos.
Prova Dados cinco pontos a, b, c, d e e, como descritos na hipótese. Considere a
única colineação B ∗ : RP2 → RP2 que aplica, respectivamente, os pontos e1 , e2 , e3
−1
e u = (1 : 1 : 1) nos pontos a, b, c, d. Seja v = B ∗ (e). Pela proposição anterior,
existe uma única aplicação polar A∗ : RP2 → RP2 que define uma cônica passando
pelos pontos e1 , e2 , e3 , u e v. Logo, a colineção B ∗ transforma a cônica CA na cônica
procurada.
2
Exemplo 12.7.2 Determinemos a equação da cônica que passa pelos pontos
a = (0 : 1 : 1),
d = (1 : 1 : 3),
b = (1 : 0 : −1),
e = (3 : 1 : 3).
c = (2 : 1 : 0),
Inicialmente construı́mos a colineação B : RP2 → RP2 tal que
B(e1 ) = a,
B(e2 ) = b,
B(e3 ) = c,
B(u) = d,
onde u = (1 : 1 : 1). Como sabemos, [B] = [k1 a, k2 b, k3 c], onde
k1 =
det[d, b, c]
= −2,
det[a, b, c]
k2 =
det[a, d, c]
= −5,
det[a, b, c]
k3 =
det[a, b, d]
= 3.
det[a, b, c]
Portanto, a colineação é determinada pela matriz
0 −5 6
0 3 .
[B] = −2
−2
5 0
Agora, seja
v = (v1 : v2 : v3 ) = B
−1
(3 : 1 : 3) = (2 :
7
5
: 53 ).
12.8. TEOREMA DE PASCAL
133
Pelo teorema anterior existe uma única cônica passando por e1 , e2 , e3 , u e v e ela
está associada à matriz
0
1
−7/25
1
0
−8/15 .
[A] =
−7/25 −8/15
0
A cônica procurada é induzida pelo operador C em R3 cuja matriz canônica é
t
2
[C] = [B −1 AB −1 ].
Exercı́cios propostos 12.6
1. Se os autovalores de uma matriz simétrica não singular não têm o mesmo sinal, o
t
mesmo ocorre com [C]−1 [A][C]−1 qualquer que seja a matriz invertı́vel [C].
2. Encontre a equação da
a) e1 , e2 , e3 ,
b) p = (2 : −1 : 3),
v = (4 : 5 : 6),
cônica incidindo nos pontos projetivos dados e classifique-a.
u = (1 : 1 : 1),
v = (1 : −1 : 3).
q = (−1 : 1 : 5),
u = (3 : 5 : −2),
w = (12 : 13 : −8).
3. Determine a equação da cônica C ⊂ R2 incidindo nos cinco pontos dados.
a) o = (0, 0), e1 = (1, 0),
e2 = (0, 1),
u = (1, 1), v = (1, 2).
b) u = (1, 1), v = (−1, −1), w = (−1, 1), t = (2, 0), s = (0, 2).
4. Determine a equação de uma cônica inscrita no pentágono do R2 cujos lados estão
sobre as retas li , i = 1, · · · , 5.
a) l1 : x = 0,
l2 : y = 0,
l3 : −x + y − 1 = 0,
l4 : −x + y + 1 = 0, l5 : x + y − 2 = 0.
5. Sejam A∗ e A∗ polaridades induzida por A. Prove que por um ponto p existem no
máximo duas retas projetivas autoconjugadas passando por p.
6. Dadas cinco retas projetivas em RP2∗ , digamos η 1 , η 2 , η 3 , η 4 e η 5 , de maneira que
três quaisquer são não concorrentes. Mostre que existe uma única polaridade A∗ e
A∗ tal que todas as retas são autoconjugadas.
12.8
Teorema de Pascal
O teorema de Pascal está para cônicas assim como o teorema de Papus está para
retas Euclidianas. Utilizaremos a seguinte notação por simplicidade de enunciado.
Dados dois pontos projetivos u e v denotaremos a reta projetiva definida por estes
dois pontos por rηuv , onde η uv = u × v.
Teorema 12.8.1 (Hexagrama mı́stico de Pascal) Sejam u, v, w, u , v , w seis pontos distintos sobre uma cônica CA . Os pontos
134
CAPÍTULO 12. CÔNICAS
a = rηvw ∩ rηv w ,
b = rηuw ∩ rηu w ,
c = rηuv ∩ rηu v .
são pontos colineares.
Prova: Vamos supor inicialmente que
u = (0 : 1 : 0), v = (1 : 0 : 0), w = (0 : 0 : 1).
Como u e v pertencem ao conjuntos dos pontos
ideais I∞ , e os pontos ideais formam uma reta
projetiva, podemos garantir que nenhum outro
ponto não pertence a I∞ . Portanto, podemos considerar as coordenadas para os
pontos projetivos restantes com a terceira coordenada igual a 1,
u = (u1 : u2 : 1),
v = (v1 : v2 : 1),
w = (w1 : w2 : 1).
Como os pontos a, b e c são interseções de retas projetivas, eles são as classes de
equivalência dos seguintes pontos do R3 , respectivamente,
a = ηvw × ηv w
b = ηuw × ηu w
c = ηuv × ηu v .
Efetuando as operações obtemos os vetores
ηvw =
ηv w =
ηuw =
ηu w =
η =
uv
ηu v =
(0, −1, 0) ,
(v2 − w2 , w1 − v1 , v1 w2 − v2 w1 ) ,
(u2 , −u1 , 0) ,
(1, 0, −w1 ) ,
(u2 − v2 , v1 − u1 , u1 v2 − u2 v1 ) ,
(0, 0, −1) ,
e, após um cálculo direto, concluı́mos que
a = (−v1 w2 + v2 w1 : 0 : v2 − w2 ) ,
b = (u1 w1 : u2 w1 : u1 ) ,
c = (−v1 + u1 v3 : u2 − v2 : 0) .
O critério para saber que os pontos projetivos a, b e c são colineares é avaliar o
determinante da matriz [a, b, c] e concluir que ele é zero. Com uma manipulação
algébrica, verificamos que o determinante desta matriz é igual a um outro determinante de uma outra matriz, a saber,
u1 u2 u1 u2
−v1 w2 + v2 w1 u1 w1 −v1 + u1
0
u2 w1 u2 − v2 = det v1 v2 v1 v2 .
det
v2 − w2
u1
0
w1 w2 w1 w2
Portanto, o problema fica reduzido a mostrarmos que a matriz
12.8. TEOREMA DE PASCAL
135
u1 u2 u1 u2
[M ] = v1 v2 v1 v2 .
w1 w2 w1 w2
tem determinante zero, ou equivalentemente, mostar que o operador linear em R3
definido pela matriz [M ] tem núcleo não trivial. Para isto, basta exibir um vetor
não nulo (k1 , k2 , k3 ) ∈ R3 tal que M (k1 , k2 , k3 ) = (0, 0, 0). Este vetor procurado
está relacionado com a matriz simétrica não singular, A, que define a cônica CA .
Vejamos. Vamos supor, para facilitar os cálculos, que a matriz A é escrita como
l k1 k2
[A] = k1 m k3 .
k2 k3 n
Como u , v, w ∈ CA devemos ter, por definição da cônica as igualdades,
0 = u , A(u ) = l
0 = v, A(v) = m .
0 = w , A(w ) = n
De onde segue que
0 k1 k2
[A] = k1 0 k3 .
k2 k3 0
Por hipótese, os pontos projetivos u, v e w também pertencem à cônica CA . Portanto, das equações
0 = u, A(u),
0 = v , A(v ), e 0 = w, A(w).
obtemos o sistema de equações com incógnitas k1 , k2 e k3 ,
u1 u2 k1 + u1 k2 + u2 k3 = 0
v v k + v1 k2 + v2 k3 = 0 .
1 2 1
w1 w2 k1 + w1 k2 + w2 k3 = 0
Mas o sistema pode ser reescrito matricialmente na forma
k1
0
u1 u2 u1 u2
v1 v2 v1 v2 k2 = 0 .
w1 w2 w1 w2
k3
0
Como [A] é uma matriz não singular
0 k1
det k1 0
k2 k3
temos que
k2
k3 = 2k1 k2 k3 = 0.
0
136
CAPÍTULO 12. CÔNICAS
Observe que o vetor (k1 , k2 , k3 ) ∈ R3 é um vetor não nulo, pois todas as suas
coordenadas são diferentes de zero, e está no núcleo do operador linear M , implicando que o determinante da matriz associada a M é zero. Mas, por construção,
det[M ] = det[a, b, c]. Logo, a, b e c estão sobre uma mesma reta pojetiva, como
desejávamos demonstrar.
2
Exercı́cios propostos 12.7
1. Seja CA a cônica associada à matriz [A] descrita ao lado.
Verifique que os pontos a seguir estão sobre a cônica CA
e determine a reta de Pascal.
u = (−1 : −1 : 2),
u = (1 : 5 : −2),
v = (−1 : −1 : 0),
v = (−5 : −1 : 4),
3. Dadas as quatro retas projetivas descritas a seguir, considere o hexagóno inscrito na cônica CA determinado por
estas retas. Prove que suas diagonais são concorrentes.
A cônica é determinada pela matriz [A] descrita ao lado.
12.9
η 2 = (0, 0, 2)
η 5 = (0, 8, 2),
1 −1 1
1 1 .
[A] = −1
1
1 2
w = (15 : 3 : −6),
w = (5 : 13 : −2).
2. Determine cinco pontos a1 , a2 , a3 , a4 e a5 sobre CA , em
que a matriz [A] é descrita ao lado. Detemine a equação
da cônica que passa por B(a1 ), B(a2 ), B(a3 ), B(a4 ) e
B(a5 ), em que [B] é a matriz
1 1/2 1/3
[B] = 1/2 1/3 1/4 .
1/3 1/4 1/5
η 1 = (2, 2, 2),
η 4 = (−6, 2, 2),
η 3 = (6, −18, 6)
η 6 = (−10, 6, 14),
Teorema de Brianchon
Recordamos que um polı́gono no plano projetivo
RP2 é obtido de um polı́gono no R2 via identificação afim, composta com uma colineação.
Teorema 12.9.1 (Teorema de Brianchon)
As diagonais determinadas por pares opostos de
vértices de um hexágono circunscrito a uma cônica
são concorrentes.
2
[A] = −1
3
−1
3
1
5 .
5 −2
1 −1 1
[A] = −1
1 1 .
1
1 2
12.10. LEITURA COMPLEMENTAR
137
São conhecidos muitos outros resultados relacionando
polı́gonos inscritos em cônicas, envolvendo incidência,
e apenas incidência. As figuras que ilustram os enunciados estão feitas em elipses por comodidade, mas poderiam ser ilustradas com qualquer outra cônica.
Proposição 12.9.1 Se um pentágono é inscrito numa
cônica, a reta tangente a um vértice intercepta a reta
que contém o lado oposto num ponto que é colinear com
os pontos de interseção das retas definidas pelos outros
dois pares de lados não adjacentes.
Proposição 12.9.2 Sejam s, t, u, v, w vértices de um pentágono inscrito numa
cônica CA , tal que a reta projetiva rηuv é oposta ao vértice s. Então os pontos a
seguir são colineares,
a = A∗ (s) ∩ rηuv ,
b = rηst ∩ rηvw ,
c = rηsw ∩ rηvt .
Proposição 12.9.3 Sejam A, B, C e D vértices de
um quadrilátero inscrito numa cônica, onde A e C são
vértices opostos. Se tA e tC são as retas tangentes à
cônica nos pontos A e C, respectivamente, então os
pontos tA ∩ lCD , tB ∩ lAB e lAC ∩ lBD são colineares.
Proposição 12.9.4 Sejam A, B, C e D vértices de
um quadrilátero inscrito numa cônica, onde A e C são
vértices opostos. Se tA tB , tC e tD são as retas tangentes à cônica nos pontos dos respectivos indices, então
os pontos tA ∩ tD , tC ∩ tB e lAB ∩ lCD são colineares.
12.10
Leitura complementar
1. Cônicas Cerca de 430 aC o grego Hipócrates de Chios (± 470 aC − ± 410 aC)
colocou o problema da ”duplicação do cubo”: dado um cubo com aresta de
comprimento a, construir a aresta de um outro cubo (utilizando apenas régua
e compasso), cujo volume seja o dobro do volume do cubo dado. Ele e seus
discı́pulos transladaram este problema para a resolução de um outro problema,
qual seria, a interseção de duas curvas planas. Hoje sabe-se, utilizando teoria
de Galois que a solução com régua e compasso não é possı́vel.
Setenta anos depois, um aluno de Eudoxos, Menaecmus (± 380 aC − ± 320
138
CAPÍTULO 12. CÔNICAS
aC), mostrou que estas curvas podem ser definidas como uma seção de um
cone circular reto por um plano perpendicular ao gerador. A partir deste fato,
foram determinadas várias propriedades métricas sobre as curvas, como aquela
que relaciona razão entre distâncias de seus pontos aos focos e diretriz. Muitos
estudaram estas curvas, entre os quais o grego Aristeu (± 370 aC − ± 300
aC), Euclides e Apolônio de Perga (± 260 aC, Grécia, 190 aC. Alexandria).
Apolônio foi o introdutor dos nomes, elipse, parábola e hipérbole e descobriu
as propriedades harmônicas de pólo e polar. Sua obra, Cônicas, é um tratado
com 400 proposições.
Com Papus de Alexandria ( ± 290 aC − ± 350 aC) inicia-se a hoje chamada
Geometria Projetiva, muitos dos seus resultados diziam respeito apenas à
incidência. O único escrito de Papus que sobreviveu ao tempo foi Sinagoga,
uma coleção de oito livros de Matemática escrita com o objetivo de rever a
geometria grega com comentários, cobrindo todos os tópicos. Não era um livro
didático como os Elementos.
Treze séculos depois, já na Renascença, nasceu o
francês Blaise Pascal (1623 − 1662), inventor, cientista eclético e prodı́gio da Matemática. Seu pai,
o advogado Etiene Pascal, com idéias educacionais
não ortodoxas, assumiu a educação do filho por conta
própria, decidindo que Blaise Pascal só estudaria Matemática ao completar 15 anos de idade. Retirou todos os textos de Matemática da residência, atitude
que despertou a curiosidade do garoto que passou a,
sozinho, estudar Geometria. Aos 12 anos de idade, Blaise Pascal demonstrou
que a soma das medidas dos ângulos internos de um triângulo é 180o . Ao
tomar conhecimento da demonstração, o pai rendeu-se, presenteando-o com
uma cópia dos Elementos de Euclides.
Em Paris, aos 14 anos de idade, Pascal passou a
acompanhar o pai nos encontros patrocinado pelo
jesuı́ta Martin Mersene (1588 − 1648), reuniões ocorridas na cela de Mersene. Muitos dos participantes entraram para a história da Matemática: Girard
Desargues (1591 − 1661), René Descartes (1597 −
1650), Pierre de Fermat (1601 − 1655), Gilles Persone de Roberval (1602 − 1675) e muitos outros. Aos
16 anos, em 1639, Pascal expôs num dos encontros
um teorema de Geometria Projetiva que ficou conhecido como o ”hexágono mı́stico de Pascal”.
Esse foi o primeiro teorema genuinamente não métrico sobre cônicas. No ano
12.10. LEITURA COMPLEMENTAR
139
seguinte publicou Ensaios Sobre Seções Cônicas, do qual restou para a história
apenas a página com a demonstração do hexagrama mı́stico. Não mais parou,
aos dezoito anos inventou a primeira máquina digital para cálculo (vendeu 50
exemplares), foi teólogo, fez trabalhos em Fı́sica, Combinatória e devemos à
sua criatividade até o prosaico carrinho de mão! É sua, a máxima: O coração
tem razões que a própria razão desconhece.
Após um século, o escocês Colin Maclaurin (1698 − 1746) apresentou o método
para contruir uma cônica passando por cinco pontos dados e, praticamente,
nada mais foi acrescentado, por décadas, à teoria de cônicas, como à Geometria
em geral. Até que um calouro de 21 anos da l’Ecole Polytechnique de Paris,
Charles Julian Brianchon (1785 − 1864), retomou o teorema de Pascal, há
muito esquecido e publicou, pela primeira vez, no Jornal da l’Ecole, o teorema
projetivo ”dual”de Pascal com uma série de corolários. Com ele, a teoria de
cônicas retornou com toda a força.
A primeira abordagem sistemática sobre cônicas foi apresentada pelo suiço
Jakob Steiner (1796 − 1863), outro com uma biografia singular. Não sabia
ler ou escrever até aos 14 anos de idade e só freqüentou a escola aos 18 anos,
contra a vontade dos pais. Estudou na Universidade de Heidelberg em Berlin
enquanto tinha um modestı́ssimo salário de professor de escola. Ele definiu
cônicas, utilizando a idéia de relacionar pencil e centros.
Mas foi o alemão Karl Georg Christian Von
Staudt (1798 − 1867) que descobriu a mais importante prepriedades de cônicas, a relação entre
pólo e polar. Ela é mais importante que a própria
cônica em si e pode ser estabelecida independentemente dela. Hoje, a polaridade é utilizada para
definir a cônica. O tratamento de cônicas dado
neste texto, devemos a ele. Uma cônica é o conjunto dos pontos que pertencem ao seu polar.
Parte VI
APÊNDICE
Capı́tulo 13
Partição de conjuntos
Faremos uma breve apresentação de relações de equivalência sobre um conjunto.
Utilizamos este conceito para particionar um conjunto em subconjuntos disjuntos
dois a dois e construir novos espaços geométricos, como o plano projetivo, por
exemplo.
13.1
Particionando conjuntos
Desejamos descrever em linguagem técnica um procedimento para particionarmos
conjuntos em subconjuntos disjuntos dois a dois. Um exemplo deixará mais claro o
significado dos termos empregados.
Seja B o conjunto formado por todos os brasileiros. Este conjunto pode ser
particionado em 28 subconjuntos, onde cada subconjunto é constituido pelas pessoas
com a mesma naturalidade, nasceram na mesma unidade federativa (estado ou
distrito federal). A união destes subconjuntos é o conjunto B e tais subconjuntos
são dois a dois disjuntos, a interseção de dois subconjuntos diferentes é sempre o
conjunto vazio, pois uma pessoa não pode ter nascido em duas UF´s diferentes.
Se enumerarmos as unidades federativas respeitando-se a ordem lexográfica, F1 é o
conjunto formado pelos brasileiros que nasceram no Estado do Acre, F2 é formado
por aqueles que são naturais do Estado do Amapá, F3 correspondente ao Estado do
Amazonas, etc. podemos considerar um novo conjunto
= {F1 , F2 , F3 , ..., F29 }
cujos elementos são subconjuntos de B. O conjunto possui as propriedades
i) Fi = { } (não é vazio);
ii) Se Fi ∩ Fj = φ então Fi = Fj ;
iii) B = ∪29
i=1 Fi .
142
CAPÍTULO 13. PARTIÇÃO DE CONJUNTOS
Voltemos à idéia de considerar subconjuntos como elementos de outro conjunto.
Como já foi dito, dado um conjunto A denota-se por P(A) o conjunto das partes
de A. Por definição de P(A), podemos escrever uma afirmação,
C ⊂ A se, e somente se, C ∈ P(A).
Como o conjunto vazio φ é sempre um subconjunto de qualquer conjuto A, portanto
φ ∈ P(A). Uma partição de A será um subconjunto especial de P(A). Este conceito
é definido da seguinte forma.
Definição 13.1.1 Seja A um conjunto não vazio. Diremos que um subconjunto
⊂ P(A) é uma partição de A se, e somente se, as seguintes afirmações são
verdadeiras:
i) nenhum elemento de é o conjunto vazio;
ii) dois elementos quaisquer de ou são iguais ou são disjuntos;
iii) a união dos elementos de é igual a A.
Exemplo 13.1.1 Voltando para o exemplo acima. O conjunto = {Fi }29
i=1 é uma
partição de B, onde Fi é o subconjunto da população brasileira nascida na unidade
federativa Fi .
Um fato que será amplamente explorado será imaginar que podemos implodir
os subconjuntos da partição em ”pontos” e criar um modelo geométrico para representá-lo, modelo que muitas vezes vizualizamos através de um esboço gráfico. Na
Matemática, a idéia de implodir cada subconjunto da partição num ponto possui
um termo técnico para designá-lo, um registro apropriado e um significado preciso.
Como ocorre geralmente quando estudamos Geometria, a palavra elemento é
trocado pela palavra ponto. Portanto, uma notação bastante conveniente é representar os elementos da partição por x, onde estamos indicando por este sı́mbolo o
único elemento da partição que contém x. Portanto, se x e y pertencem ao mesmo
subconjunto da partição então eles representam o mesmo elemento da partição,
x = y, pois só existe um único subconjunto de A que os contêm. Para enfatizar
este aspecto, definimos uma função, chamada de função projeção, (ou simplesmente
projeção),
Ψ : A → ,
Φ(x) = x.
A projeção está bem definida pois existe um, e somente um, subconjunto da partição
que contém x. O subconjunto é aquele que estamos indicando por x. A aplicação
Ψ também é sobrejetiva pois dado um ”ponto” (elemento) de , como ele é um
13.1. PARTICIONANDO CONJUNTOS
143
subconjunto não vazio, podemos escolher algum dos seus elementos, digamos x, e
por definição da função projeção Ψ, ele será a imagem de x.
Exemplo 13.1.2 Para cada inteiro n ∈ Z, defina o subconjunto An ⊂ R2 por
An = {(x, y) ∈ R2 ; n ≤ x < n + 1}.
É fácil verificar que
= {..., A−2 , A−1 , A0 , A1 , A2 , ...}
R2
e cada subconjunto An é esboçado graficamente no plano
é uma partição de
cartesiano como faixas verticais de altura não limitada, largura 1, incluindo no seu
bordo a reta vertical x = n mas não incluindo a reta vertical x = n + 1. Escolhendo
o ponto (n, 0) ∈ An podemos registrar a partição na forma
= {. . . , (−2, 0), (−1, 0), (0, 0), (1, 0), (2, 0), . . . }.
Portanto, a representação gráfica mais natural para o quociente seria a mesma
representação que fazemos para o conjunto dos inteiros Z.
2.
Exemplo 13.1.3 Para cada r ∈ R, considere o subconjunto Ar ⊂ R2 definido por
Ar = {(x, y) ∈ R2 ; x = r}.
Também aqui é fácil verificar que = {Ar }r∈R é uma partição de R2 e cada Ar é
esboçado graficamente no plano cartesiano como uma reta vertical. Escolhendo os
pontos (r, 0) ∈ Ar podemos registrar graficamente a partição da mesma forma
que representamos os números reais.
2.
Exercı́cios propostos 13.1
1. Se A = {a, b, c}, descreva o conjunto P(A) e construa uma partição . Quantas
partições você pode construir para o conjunto A?
2. Mostre que um elemento a ∈ A pertence a um, e somente um, elemento de uma
partição de A.
3. Para cada real r ∈ R, seja Nr como abaixo. Defina = {Nr }r∈R . Verifique que é
uma partição de R2 e faça um esboço gráfico para indicar .
(a) Nr = {(x, y) ∈ R2 ; y = r}.
(b) Nr = {(x, y) ∈ R2 ; x + y = r}.
(c) Nr = {(x, y) ∈ R2 ; x2 + y 2 = r2 }.
4. Dada a função f : R2 → R, f (x, y) = xy. Para cada número real r denote por Nr a
curva de nı́vel r de f , isto é
Nr = {(x, y) ∈ R2 ; f (x, y) = r}.
Mostre que = {Nr }r∈R é uma partição de R2 e esboce um gráfico para indicar .
144
CAPÍTULO 13. PARTIÇÃO DE CONJUNTOS
5. Considere a seguinte partição de R2 : = { { (x, y) } }(x,y)∈R2 . Embora a notação não
facilite a nossa leitura, estamos indicando que os elementos da partição são subconjuntos de R2 formados por um único elemento. Esboce graficamente .
13.2
Relação de equivalência
Passemos a descrever uma técnica mais matemáticamente apropriada para construir
partições de conjuntos.
Seja A um conjunto não vazio. Qualquer subconjunto R de A × A é chamado
de relação em A. Uma relação de equivalência no conjunto A é um subconjunto
R do produto cartesiano A × A, no qual são válidas as seguintes afirmações para
quaisquer elementos a, b, c ∈ A:
1) (a, a) ∈ R;
(reflexiva)
2) se (a, b) então (b, a) ∈ R;
(simétrica)
3) se (a, b) ∈ R e (b, c) ∈ R então (a, c) ∈ R.
(transitiva)
A notação clássica para indicar uma relação de equivalência R num conjunto A,
é o sı́mbolo ∼. Como R é um subconjunto do produto cartesiano A × A, em geral,
ele é definido por uma sentença. Sendo assim, em lugar de escrevermos (a, b) ∈ R,
escrevemos a ∼ b, lendo-se a está relacionado com b ou a é equivalente a b. Desta
forma, podemos enunciar as propriedades anteriores da seguinte maneira:
1 ) a ∼ a;
(reflexiva)
2 ) se a ∼ b então b ∼ a;
(simétrica)
3 ) se a ∼ b e b ∼ c então a ∼ c.
(transitiva)
Exemplo 13.2.1 Reapresentemos a partição da população brasileira, já citada anteriormente. Seja B o conjunto formado por todos os brasileiros. Defina o subconjunto do produto cartesiano R ⊂ B × B por
R = {(a, b) ∈ B × B; a e b nasceram na mesma unidade federativa},
ou com a notação clássica,
a ∼ b ⇔ a e b nasceram na mesma unidade federativa.
É imediato verificarmos as propriedades que definem uma relação de equivalência.
Reflexiva a ∼ a pois a e a nasceram na mesma unidade federativa Fi .
13.3. CLASSE DE EQUIVALÊNCIA
145
Simétrica a ∼ b significa que a e b nasceram na mesma unidade federativa Fi .
Logo, b e a nasceram na unidade federativa Fi . Isto significa que b ∼ a.
Tansitiva Se a ∼ b e b ∼ c, então a e b nasceram na unidade federativa Fi e b e c
nasceram na unidade federativa Fj . Logo, a unidade federativa Fi é a mesma que a
unidade federativa Fj , pois b não pode ter nascido em duas unidades. Isto implica
que a e c nasceram na mesma unidade Fi , significando que a ∼ c.
2
Exercı́cios propostos 13.2
Escreva a relação de equivalência utilizando a liguagem de conjuntos e mostre as propriedades simétrica, reflexiva e transitiva.
a) Seja A = R2 . Diremos que (v1 , v2 ) ∼ (w1 , w2 ) se v1 = w1 .
b) Seja A conjunto das esferas em Rn . Diremos que a ∼ b se o raio de a é igual ao raio
de b.
2
13.3
Classe de equivalência
Seja ∼ uma relação de equivalência num conjunto A. A classe de equivalência de
um elemento a ∈ A é o subconjunto de A denotado e definido por
a = {x ∈ A : x ∼ a}.
Exercı́cio 13.3.1 Seja ∼ uma relação de equivalência no conjunto não vazio A. Se
a = b então a = b? Justifique.
2
Exemplo 13.3.1 Mostremos que a seguinte relação em R2 é de eqüivalência,
(x1 , y1 ) ∼ (x2 , y2 )
se, e somente se,
x1 = x2 .
1. Reflexiva É claro que (x1 , y1 ) ∼ (x1 , y1 ) pois x1 = x1 .
2. Simétrica Dizer que (x1 , y1 ) ∼ (x2 , y2 ), significa dizer que x1 = x2 . Mas
podemos também escrever x2 = x1 . Isto é equivalente a (x2 , y2 ) ∼ (x1 , y1 ).
3. Transitiva Se (x1 , y1 ) ∼ (x2 , y2 ) e (x2 , y2 ) = (x3 , y3 ), então x1 = x2 e x2 = x3 .
Logo, é imediato concluir que x1 = x3 , isto é, (x1 , y1 ) ∼ (x3 , y3 ).
Qual a classe de equivalência de (2, 3)? Por definição de classe de equivalência,
ela é o conjunto descrito por
(2, 3) = {(x, y); (x, y) ∼ (2, 3)}.
146
CAPÍTULO 13. PARTIÇÃO DE CONJUNTOS
Reescrevendo este conjunto chegamos a
(2, 3) = {(x, y); x = 2 e y ∈ R}.
Portanto, ao fazermos o esboço gráfico de (2, 3) no plano cartesiano xy obtemos uma
reta vertical cuja equação é x = 2. Uma observação importante é que (2, −7) ∈ (2, 3)
(claro) e (2, −7) = (2, 3), pois
(2, −7) = {(x, y); x = 2 e y ∈ R}.
Isto nos leva a seguinte pergunta: se (x1 , y1 ) ∈ (2, 3) então (x1 , y1 ) = (2, 3)? A
resposta é sim e veremos isto na proposição a seguir. Deixamos ao leitor, a tarefa
2
de esboçar um gráfico da classe de equivalência (x1 , y1 ).
Proposição 13.3.1 Se ∼ é uma relação de equivalência num conjunto não vazio
A então
1. para todo a ∈ A temos a ∈ a;
2. a ∼ b se, e somente se, a = b.
Prova 1) Dado um elemento a ∈ A. Por definição de classe de equivalência temos
que a = {b ∈ A; b ∼ a}. Mas uma relação de equivalência é simétrica, logo, a ∼ a.
Isto implica que a ∈ a.
2) (⇒) Vamos supor que a ∼ b. Considere as classes de equivalência
a = {c ∈ A; c ∼ a}
e
b = {c ∈ A; c ∼ b}.
Para verificar a igualdade, basta mostrar que cada um destes conjuntos contém o
outro. Se c ∈ a então c ∼ a, mas por hipótese a ∼ b. Desde que a relação é
transitiva podemos afirmar que c ∼ b. Isto implica que c ∈ b. Como cada elemento
de a também é um elemento de b, temos mostrado a inclusão a ⊂ b. A inclusão
oposta tem demonstração semelhante utilizando a transitividade da relação.
2) (⇐) Vamos supor que a = b. Com esta hipótese e o item 1) podemos garantir
2
que b ∈ a. Logo, por definição de classe de equivalência segue que b ∼ a.
O fato importante é que uma relação de equivalência sobre um conjunto A define
uma partição de A. Denote por A/ ∼ o subconjunto de P(A) formado pelas classes
de equivalência dos elementos de A.
Proposição 13.3.2 Se ∼ uma relação de equivalência sobre um conjunto não vazio
A então A/ ∼ é uma partição de A.
13.3. CLASSE DE EQUIVALÊNCIA
147
Prova Dado a ∈ A, considere o conjunto a ∈ = A/ ∼. Pelo item 1) da proposição
anterior sabemos que a ∈ a. Portanto, o conjunto a é não vazio e
A⊂
a.
a∈A
A inclusão oposta é trivial pois como cada a ⊂ A então
a ⊂ A.
a∈A
Isto mostra que a união dos membros de é igual a A.
Mostremos que duas classes de equivalência ou são disjuntas ou são iguais. Dados
a e b em = A/ ∼ tais que a ∩ b = φ. Sendo assim, escolha um elemento x ∈ a ∩ b.
É óbvio que x ∈ a e x ∈ b. Da definição de classe de equivalência segue que x ∼ a
e x ∼ b. Logo, podemos concluir pela propriedade transitiva que a ∼ b. Portanto,
a = b, como demonstrado na proposição anterior.
2
A recı́proca do resultado anterior também é verdadeira.
Proposição 13.3.3 Se é uma partição de um conjunto não vazio A então existe
uma relação de equivalência ∼ definida sobre A de maneira que o conjunto das
classes de equivalência A/ ∼ é a partição .
Prova Dado . Definimos uma relação ∼ sobre A do seguinte modo:
a∼b
⇔
existe X ∈ tal que a ∈ X e b ∈ X.
Ou seja, a está relacionado com b se existir um conjunto X da partição que
contém a e b. A relação ∼ assim definida é de equivalência. Verifiquemos.
1) Para qualquer a ∈ A existe uma classe X ∈ contendo a. Portanto, a ∼ a.
2) Para quaisquer dois elementos a, b ∈ A, se a ∼ b então existe um X ∈ tal
que a ∈ X e b ∈ X. Logo b ∼ a.
3) Para quaisquer três elementos a, b, c ∈ A, se a ∼ b e b ∼ c então existem
X, Y ∈ tais que a, b ∈ X e b, c ∈ Y . Como b ∈ X ∩ Y = { } e é uma
partição de A, concluı́mos que X = Y . Logo a, b, c ∈ X, implicando que a ∼ c.
Destes três itens podemos concluir que ∼ é uma relação de equivalência. Deixamos
ao leitor um exercı́cio. Mostrar que = A/ ∼.
2
Exercı́cios propostos 13.3
148
CAPÍTULO 13. PARTIÇÃO DE CONJUNTOS
1. Mostre que ∼ é uma relação de equivalência em Z e esboce com algum grafico Z/ ∼.
(a) a ∼ b se, e somente se, a − b é divisı́vel por 2.
(b) a ∼ b se, e somente se, a − b é divisı́vel por p, onde 0 = p ∈ Z.
2. Seja A = {x ∈ Z : 0 ≤ x ≤ 16}. Mostre que a ∼ b ⇔ a − b = 4k0 , onde k0 ∈ Z está
fixado, é uma relação de equivalência em A. Esboce com algum gráfico A/ ∼.
3. Sejam a, b ∈ R. Diremos que a ∼ b ⇔ b − a ∈ Z. Mostre que ∼ define uma relação
de equivalência em R e esboce graficamente R/ ∼.
4. Seja A = R2 \{o}. Mostre que ∼ é uma relação de equivalência em A e esboce um
gráfico para representar A/ ∼.
(a) a ∼ b ⇔ existe λ > 0 tal que a = λb. Para cada elemento a ∈ R2 dado
abaixo, determine o representante de a, cuja segunda coordenada é y = 1.
i) a = (2, 3).
ii) a = (−1, −1). iii) a = (3, 1).
iv) a = (−1, −7). v) a = (2, 3).
iv) a = (0, 1).
(b) a ∼ b ⇔
existe λ = 0 tal que a = λb.
5. Seja A = R3 \{o}. Mostre que ∼ é uma relação de equivalência em A.
(a) a ∼ b ⇔ existe λ > 0 tal que a = λb. Faça um esboço gráfico para representar A/ ∼. Determine o representante de cada elemento a ∈ R3 sabendo-se que
a tem a terceira coordenada z = 1.
i) a = (2, 0, 3).
ii) a = (−1, 4, −1). iii) a = (3, 1, −2).
iv) a = (−1, 0, −7). v) a = (2, 1, 2).
vi) a = (1, 1, −1).
(b) a ∼ b ⇔
existe λ = 0 tal que a = λb.
Índice Remissivo
A
Academia Platônica
4, 7
Alexandre da Macedônia
4
Ângulo
elı́ptico
76
Euclidiano
60
Aplicação
conceito
19
ortogonal
51
polar
122
pólo
122
projetiva
100
que preserva ângulo
53
que preserva norma
53
que preserva produto interno
51
quociente (projetiva)
89
Apolonius
7, 138
Aristeu
138
Aristóteles
4, 17
Autoespaço
47
Autólicos de Pitane
4
Autovalor, autovetor
46
Autoconjugado
ponto projetivo
123
reta projetiva
123
Axioma de Playfair
6
Axiomas não utilizados por Euclides
8
B
Base
canônica do Rn
ordenada
ordenada positiva (negativa)
ortonormal
Begle, Edward G.
Birkhoff, David
Brianchon, Charles Julian
C
29
29
31
36
10
10
139
Classe de equivalência
Cı́rculo untiário canônico
Cirilo, Patriarca de Alexandria
Colinearidade
no plano elı́ptico
no plano projetivo
Combinação linear
Congruência
de ângulos Euclidianos
de luas
de segmentos elı́pticos
de segmentos Euclidianos
de triângulos elı́pticos
Continuidade
veja Sistema axiomático
Coordenadas homogêneas
Correlação
Conjugada, reta projetiva
Cônica
Conjunto
linearmente independente
ortonormal de vetores
Correlações
Coxeter, H. M. S.
D
Delta de Kronecker
Desargues, Girard
Descartes, René
Desigualdade de Cauchy-Schwarz
Dinostrato
Distância
definição
elı́ptica
Euclidiana
projetiva
E
Elementos
145
58
7
71
94
25
61
76
75
60
77
67
89
100
123
124
28
36
121
10
36
8, 138
138
34
4
49
67
50
99
150
de Euclides
de Hipócrates
Elipse
Escalar
Esfera
dual
em Rn
unitária canônica
Espaço
Cartesiano
vetorial
Euclides
Eudoxos
Euler, Leohnard
F
Fermat, Pierre
Fórmula de Lagrange
Função projeção
G
Gauss, J. C. F.
Geometria
Afim
Analı́tica
Elı́ptica (dupla)
Elı́ptica simples (projetiva)
Espacial (sólida)
Euclidiana (plana)
não Euclidiana
Projetiva (Elı́ptica simples)
H
Hη
Hemisfério
Hilbert, David
Hipátia
Hipérbole
Hiperplano em Rn
Hipócrates
I
I∞
Identificação afim
Identidade
cı́clica
de Lagrange
Isometria
de Rn
ÍNDICE REMISSIVO
5
3
125
21
de S2
J
Justiniano, Imperador Romano
74
7
74
58
58, 67
K
Kepler, Johannes
Klein, Felix
99
14
20
21, 31
5, 138
4, 138
74, 99
L
Lei dos senos (cossenos) em S2 , 1a
Lei dos senos (cossenos) em S2 , 2a
Liceu
Lua
80
85
4
76
138
37
142
7
95
12
67
87
62
57
13
87
60
76
9
7
125
58
3, 137
90
96
38
38
49
M
Maclaurin, Colin
Matriz
canônica
de uma transformação linear
invertı́vel
simétrica
transposta
Meneacmus
Mersene, Martin
Movimento rı́gido
Museu de Alexandria
N
Newton, Isaac
Norma
Núcleo de uma transformação linear
O
Operador
linear
linear simétrico
positivo (negativo)
transposto
Orientação
de uma reta elı́ptica
de uma reta Eculidiana
P
Papus
Parábola
Partição de conjunto
Pascal, Blaise
Pitágoras
Plano
139
41
41
44
48
48
4, 138
138
49
5
7
34
40
39
48
48
47
73
60
7, 138
125
142
8, 138
3
ÍNDICE REMISSIVO
afim
Cartesiano
em R3
elı́ptico
elı́ptico dual
Euclidiano
orientado
perfurado
projetivo
Platão
Polı́gono projetivo
Polinômio caracterı́stico
Pontos ideais
Produto
vetorial
vetorial duplo
interno
Projetividade
Ptolomeu I
R
Relação de equivalência
Reta
afim
de Desargues
de Papus
em R2
em R3
elı́ptica
elı́ptica orientada
Euclidiana orientada
perfurada
projetiva
tangente a uma cônica
Roberval, Persone de
S
S1 , S2
Saccheri, Giovanni
Sistema axiomático
da Geometria Afim
da Geometria Elı́ptica
da Geometria Euclidiana
da Geometria Projetiva
de Euclides
de Hilbert
Segmento
de reta Euclidiano
orientado
Semi-plano
151
95
20
62
69
73
59
72
88
88
4
110
47
90
36
38
33
100
5
144
96
113
111
62
63
69
72
60
88
91
127
138
58
8
96
66
14
87
6
9, 14
60
22
elı́ptico
Euclidiano
Steiner, Jakob
Subespaço vetorial
76
60
139
24
T
Tales de Mileto
3
Teaetetus
4
Teodoro de Cirene
4
Teorema
da classificação das isometrias de S2 74
da classificação das isometrias de Rn 53
de Brianchon
136
de Desargues
113
de Girard
82
de Papus
111
de Papus e Maclaurin
132
de Pascal
134
de Pitágoras
78
do núcleo e da imagem
43
espectral
48
fundamental da Geom. Projetiva 105
Transformação linear
definição
39
invertı́vel
44
Translação
50
Triângulo
elı́ptico
77
elı́ptico dual
84
V
Veblen, Oswald
Vetor normal
a um plano em R3
a uma reta em R2
Vetor unitário
Vetores ortogonais
von Staudt, Karl Georg Christian
W
Wesley Young, John
10
62
59
34
35
99, 139
10
Referências Bibliográficas
[A-L]
Anglin, W.S. & Lambek, J.; The Heritage of Theles; Undergraduate
Texts in Mathematics; Springer-Verlag (1995).
[An1]
Andrade, P.; Um curso de Álgebra Linear ; Prepint; Universidade Federal
do Ceará (2002).
[An2]
Andrade, P.; Introdução à Álgebra Linear ; Editora Fundamentos 1a
Edição (2003).
[Ang]
Anglin, W.S.; A Concise History of Philosophy; Readings in Mathematics; Undergraduate Texts in Mathematics; Springer-Verlag (1991).
[ArB]
Artmann, B.; Euclid - The creation of Mathematics; Springer-Verlag
(1999).
[Ar1]
Artin, E.; Geometric Algebra; Wiley Classic Library; Interscience Publishers, Inc., N. Y. (1988).
[BCB]
Boyer, C. B.; História da Matemática; Tradução Elza Gomide; Editora
Edgar Blücher Ltda - Univ. de São Paulo (1974).
[BJL]
Barbosa, J. L. M.; Geometria Hiperbólica; SBM; XX Colóquio Brasileiro
de Matemática (1995).
[Bon]
Bonola, R.; Non Euclidian Geometry; Dover Publications, Inc. (1955).
[Cal]
Calinger, R.; Classics of Mathematics; Edit. Ronald Calinger; Prentice
Hall (1995).
[Cx1]
Coxeter, H. S. M.; Non-Euclidian Geometry; The Mathematical Association of America, Spectrum Series, 6a Ed. (1998).
[Cx2]
Coxeter, H. S. M.; The Real Projective Plane; 3a Ed. Springer -Verlag
(1992).
REFERÊNCIAS BIBLIOGRÁFICAS
153
[Fis]
Fishback, W. T.; Projective and Euclidian Geometry; John Willy and
Sons, Inc, 2a Ed. (1964).
[Hai]
Hanes, K.; Analytic Projective Geometry and Its Applications; UMAP
Modules, (1990) pg 111-149.
[Har]
Hartshorne, R.; Geometry: Euclid and Beyond; Springer-Verlag (2000).
[Hea]
Heath, Sir T.; A History of Greek Mathematics, vol I, II ; Dover Publications Inc. NY (1981).
[Lng]
Lang, S.; Estruturas Algéricas; Ao Livro Técnico S. A. (1972).
[M-P]
Modenov, P. S. & Parkhomenko, A. S.; Geometric Transformations,
vol I e vol II; Academic Press (1965).
[Mon]
Montanelli, I.; História dos Gregos; IBRASA; 2a Edição (1968).
[Rat]
Raticliffe, J.; Foundations of Hyperbolyc Manifolds; Graduate Texts in
Mathematics; Springer-Verlag, n 149 (1994).
[Sti]
Stiwell, J.; Mathematics and His History; Undergraduate Texts in
Mathematics; Springer-Verlag (1989).
[W-W] Wallace, E. C. & West, S. F.; Roads to Geometry; 2a Ed. Prentice
Hall (1998).
[Win]
Winterle,P.; Vetores e Geometria Analı́tica; Makron Books (2000).
[Wyl]
Wylie Jr, C.R.; Introduction to Projective Geometry; McGraw-Hill Book
Comp. (1970).
[web1]
The MacTutor History of Mathematics Archive; Created by J. J. O’Connor
& E. F. Robertson, www.history-mcs.st-andews.ac.uk
Plácido Andrade
Universidade Federal do Ceará
Centro de Ciências
Departamento de Matemática
Campus do Pici Bloco 914
CEP 60.455-760 Fortaleza, CE, Brasil
Fax (85) 288.98.89
e-mail [email protected]
Abdênago Alves Barros
Universidade Federal do Ceará
Centro de Ciências
Departamento de Matemática
Campus do Pici Bloco 914
CEP 60.455-760 Fortaleza, CE, Brasil
Fax (85) 288.98.89
e-mail [email protected]
Baixar