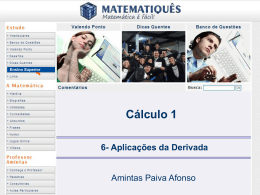
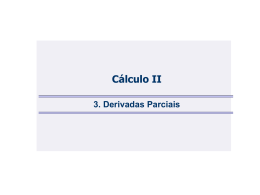
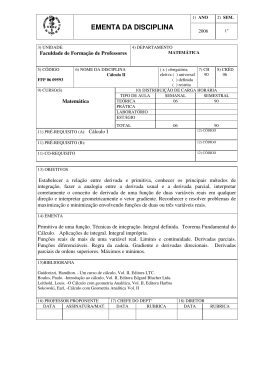
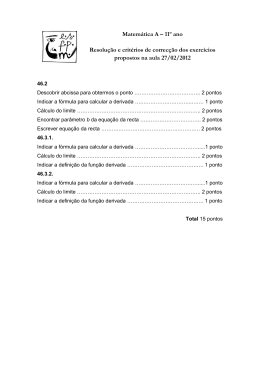
Cálculo Diferencial em IRn (Cálculo diferencial em campos escalares) José António Caldeira Duarte DMAT 16 Maio 2001 Conteúdo 1 Cálculo Diferencial em Campos Escalares 1.1 Derivadas Parciais de 1a Ordem . . . . . . . . . . 1.2 Derivadas Parcias de Ordem Superior à Primeira 1.3 Diferenciabilidade de Campos Escalares . . . . . . 1.4 Derivada Dirigida . . . . . . . . . . . . . . . . . . 1.5 O vector Gradiente . . . . . . . . . . . . . . . . . 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 6 7 16 19 1 6 / M a io / 2 0 0 1 1 Cálculo Diferencial em Campos Escalares O conceito fundamental desta secção é o de derivada de um campo escalar. Derivadas Parciais de 1a Ordem 1.1 Considere-se uma função z = f (x, y) definida num subconjunto D de IR2 e seja (a, b) um ponto interior de D. Fixando y em b, está-se a restringir o domínio da função aos pontos que pertencem a D e se encontram sobre a recta y = b do plano XOY ; a correspondência x → f(x, b) define então uma função de uma única variável x. z c z c O gráfico da função z=f(x,y) O gráfico da função f(x,b) O b y O a b y a x x Se esta função for derivável no ponto x = a, tem-se que a sua derivada nesse ponto é dada por f(a + h, b) − f (a, b) . h→0 h lim É a este limite (caso exista) que se dá o nome de derivada parcial da função f (x, y) em ordem a x, no ponto (a, b). Simbolicamente é representada por fx (a, b) , ∂f (a, b) ou (Dx f) (a, b) ∂x Podemos interpretar geometricamente este conceito da seguinte forma: A função f (x, b) foi obtida fixando o valor da variável y em b na função f(x, y); então o seu gráfico será obtido pela intersecção do gráfico da função z = f(x, y) com o plano vertical y = b. 2 1 6 / M a io / 2 0 0 1 A derivada parcial de f em ordem a x no ponto (a, b), sendo a derivada da função real de variável real z = f(x, b), representará o declive da recta tangente ao seu gráfico no ponto (a, b, c). A recta tangente ao gráfico da função f(x,b) no ponto (a,b,c). z c O gráfico da função f(x,b) b O y a x De forma análoga define-se a derivada parcial de f (x, y) em ordem a y no ponto (a, b). Fixando x em a, a transformação y → f (a, y) define uma função de uma só variável y; z c O gráfico da função f(a,y) y b O a x se esta função for derivável no ponto y = b, a sua derivada nesse ponto é dada por f(a, b + k) − f(a, b) k→0 k lim que representa a derivada parcial de f (x, y) em ordem a y no ponto (a, b). 3 1 6 / M a io / 2 0 0 1 Simbolicamente esta derivada parcial é representada por fy (a, b) , ∂f (a, b) ou (Dy f) (a, b) . ∂y Geometricamente, fy (a, b) representa o declive da recta tangente ao gráfico de z = f (a, y) no ponto (a, b, c). z c A recta tangente ao gráfico da função f(a,y) no ponto (a,b,c). O O gráfico da função f(a,y) y b a x As definições apresentadas mostram que as derivadas parciais, caso existam, obedecem às já conhecidas regras de derivação para as funções reais de variável real; isto significa que para derivar em ordem a x uma função das variáveis x e y, a variável y deve ser encarada como uma constante e, reciprocamente, para obter a derivada em ordem a y, a variável x deve ser tratada como constante. Exemplo 1 No caso de função f (x, y) = y 2 + xy + 4x3 , ter-se-á df 2 df 3 2 fx (0, 1) = = =1 1 + x1 + 4x 1 + 12x dx dx x=0 x=0 fy df 2 df (0, 1) = = = 2. y +0+0 (2y) dy dy y=1 y=1 Exemplo 2 Calcular as derivadas parciais da função f (x, y) definida por x+y x=0∨y =0 f (x, y) = 1 x = 0 ∧ y = 0 no ponto (0, 0). Como em qualquer vizinhança de (0, 0) existem pontos onde a função é definida por um dos ramos, e pontos onde é definida pelo outro ramo, 4 1 6 / M a io / 2 0 0 1 (qualquer vizinhança de (0, 0) contém pontos que se encontram sobre os eixos onde a função é definida pela expressão x + y, e pontos que não pertencem aos eixos, onde a função assume o valor 1), as derivadas parciais terão que ser calculadas utilizando a definição. Tem-se então, fx (0, 0) = lim h→0 f(h, 0) − f(0, 0) h−0 = lim =1 h→0 h h f (0, k) − f (0, 0) k−0 = lim = 1. k→0 k→0 k k fy (0, 0) = lim Repare-se que no exemplo anterior ambas as derivadas parciais de f existem na origem, mas a função não é continua neste ponto; de facto lim f(x, y) não existe. (x,y)→(0,0) Contrariamente ao que se verifica para as função reais de variável real, em que a existência de derivada finita num ponto implica que a função seja continua. nesse ponto, em campos escalares a existência de derivadas parciais finitas não implica continuidade. A definição de derivada parcial generaliza-se com facilidade a campos escalares de IRn em IR. Definição 1 Seja f : D ⊆ IRn → IR e (a1 , a2 , . . . , an ) ∈ intD. Chamase derivada parcial de f em ordem à variável xi , 1 ≤ i ≤ n, no ponto ∂f (a1 , a2 , . . . , an ), e representa-se por ∂x (a1 , a2 , . . . , an ), ao limite i f (a1 , a2 , . . . , ai + h, . . . , an ) − f (a1 , a2 , . . . , ai , . . . , an ) . h→0 h lim 5 1 6 / M a io / 2 0 0 1 1.2 Derivadas Parcias de Ordem Superior à Primeira Considere-se agora uma função f : D ⊆ IR2 → IR que admite derivada parcial em ordem a x, num conjunto de pontos E ⊆ D. A cada ponto de E podemos pois associar um número real - a derivada parcial de f em ordem a x nesse ponto. Obtém-se assim uma nova função de E em IR, que se chama a função derivada parcial de f em ordem a x, e que se representa por ∂f ou fx . ∂x De uma forma análoga se poderia definir a função derivada parcial em ordem a y, ∂f ou fy . ∂y Exemplo 3 A função f (x, y) = x3 y2 − 3xy admite como funções derivadas parciais fx = 3x2 y2 − 3y fy = 2x3 y − 3x Como novas funções fx e fy podem admitir por sua vez, derivadas parciais. Assim, a derivada parcial de fx em ordem a x, num ponto (a, b) ∈ D será fx (a + h, b) − fx (a, b) h→0 h lim 2 e representa-se por fx2 (a, b) ou ∂∂xf2 (a, b). A derivada parcial de fx em ordem a y, no ponto (a, b) será calculada por fx (a, b + k) − fx (a, b) k→0 k lim 2 ∂ f (a, b) ou ∂y∂x (a, b). que se representa por fxy As derivadas parciais da função fy , em ordem a x e em ordem a y, são respectivamente, ∂ 2f ∂ 2f (a, b) = fyx (a, b) e (a, b) = fy2 (a, b) ∂x∂y ∂y2 Note que ∂2f ∂y∂x (a, b) e ∂2f ∂x∂y (a, b) são abreviaturas das notações ∂ 2f ∂ ∂f (a, b) = (a, b) , ∂y∂x ∂y ∂x ∂ ∂f ∂ 2f (a, b) = (a, b) . ∂x∂y ∂x ∂y , fy2 e fyx chamam-se as derivadas parciais de 2a Às derivadas fx2 , fxy ordem da função f . 6 1 6 / M a io / 2 0 0 1 Exemplo 4 No exemplo anterior, fx2 = 6xy2 fxy = 6x2 y − 3 = 6x2 y − 3 fyx fy2 = 2x3 A partir das derivadas de 2a ordem podem ser definidas as derivadas de 3a ordem e assim sucessivamente. As derivadas fxy e fyx costumam ser designadas por derivadas mistas e em certas condições dá-se a igualdade entre elas, como acontece no exemplo anterior. O teorema que apresentamos a seguir, sem demonstração, estabelece algumas condições em que se dá essa igualdade. numa vizinhança de (a, b) Teorema 1 (Schwarz) Se existirem fx , fy e fxy e se fxy for contínua nesse ponto, então também existe fyx (a, b) e fxy (a, b) = fyx (a, b) . Dem. Omitida. 1.3 Diferenciabilidade de Campos Escalares Da mesma forma que a diferenciabilidade de uma função real de variável real, num certo ponto a do seu domínio, está associada à existência de uma recta tangente ao gráfico da função no ponto (a, f (a)), a diferenciabilidade de um campo escalar de IR2 em IR, num ponto (a, b) do seu domínio, está associada à existência do plano tangente ao gráfico desse campo escalar no 7 1 6 / M a io / 2 0 0 1 ponto (a, b, f (a, b)). z c O plano tangente ao gráfico da função z=f(x,y) no ponto (a,b,c). b O y a x De acordo com a figura, é natural esperar que o plano tangente contenha as rectas cujos declives são as derivadas parciais da função em ordem a x e em ordem a y, no ponto (a, b). Sendo as equações cartesianas dessas rectas y=b z − f(a, b) = fx (a, b)(x − a) e x=a , z − f (a, b) = fy (a, b)(y − b) a equação do plano que as contém é fx (a, b)(x − a) + fy (a, b)(y − b) − (z − f (a, b)) = 0. (1) No entanto, a existência do plano tangente não depende apenas da existência das derivadas parciais como facilmente se pode concluir pelo exemplo seguinte. Exemplo 5 A função f (x, y) = |xy|, cujo gráfico pode ser visto na figura seguinte, admite derivadas parciais finitas na origem, fx (0, 0) = fy (0, 0) = 0. Apesar disso, intuitivamente percebe-se que não tem sentido falar da existência de plano tangente ao gráfico da função no ponto (0, 0, 0), donde esta 8 1 6 / M a io / 2 0 0 1 função não é diferenciável na origem. z f(a,b)+hf’x(a,b)+kf’y(a,b) c f(a+h,b+k) b b+k y O a+h a (h,k) x f(a+h,b+k)- f(a,b)-hf’x(a,b)-kf’y(a,b) O plano tangente ao gráfico de uma função no ponto (a, b, f (a, b)) só será definido se a diferença entre o valor da função num ponto (a + h, b + k) de uma vizinhança de (a, b), e a cota nesse ponto, do plano definido pela equação fx (a, b)(x − a) + fy (a, b)(y − b) − (z − f(a, b)) = 0, for um infinitésimo com a distância entre os pontos (a, b) e (a + h, b + k), isto é, se f (a + h, b + k) − f(a, b) + hfx (a, b) + kfy (a, b) √ lim = 0. (h,k)−→(0,0) h2 + k2 Concluindo, diremos que f é uma função diferenciável em (a, b), ponto interior do domínio de f, se e só se existirem as derivadas parciais fx (a, b) e fy (a, b), e além disso f(a + h, b + k) − f (a, b) − hfx (a, b) − kfy (a, b) √ lim = 0. (h,k)−→(0,0) h2 + k2 9 (2) 1 6 / M a io / 2 0 0 1 Exemplo 6 Para provar que a função f (x, y) = x2 y2 é diferenciável em (0, 0) comecemos por calcular fx (0, 0) e fy (0, 0): fx (x, y) = 2xy2 e fy (x, y) = 2yx2 ⇒ fx (0, 0) = 0 e fy (0, 0) = 0. Vamos agora demonstrar que f (0 + h, 0 + k) − f (0, 0) − hfx (0, 0) − kfy (0, 0) √ = 0. (h,k)→(0,0) h2 + k2 lim Para isso vamos utilizar a definição de limite; neste caso, f (0 + h, 0 + k) − f (0, 0) − hfx (0, 0) − kfy (0, 0) √ =0⇔ lim (h,k)→(0,0) h2 + k2 h2 k2 lim √ =0⇔ (h,k)→(0,0) h2 + k 2 √ h2 k2 2 2 < δ. ∀δ > 0, ∃ε > 0 : h + k < ε ⇒ √ h2 + k2 Ora, 2 2 2 h2 k2 2 2 (h2 + k2 ) 2 3 √ = √h k √ = h + k ; ≤ h2 + k 2 h2 + k2 h2 + k2 √ 3 Então, fazendo ε = δ 2 fica provado que, quando h2 + k2 < ε, 2 h2 k2 2 2 ≤ h + k2 3 < ε 23 = δ 32 3 = δ. √ h2 + k2 Repare-se agora que da relação 2 podemos concluir que lim f (a + h, b + k) − f(a, b) − hfx (a, b) − kfy (a, b) = 0, (h,k)−→(0,0) ou, equivalentemente, f(a + h, b + k) = f(a, b) + hfx (a, b) + kfy (a, b) + R (h, k) , com lim (3) R (h, k) = 0. (h,k)−→(0,0) A igualdade 3 pode ainda ser expressa na forma h + R (h, k) ; f (a + h, b + k) = f(a, b) + fx (a, b) fy (a, b) k 10 1 6 / M a io / 2 0 0 1 fazendo α = (a, b) , v = he1 + ke2 2 e designando por linear de IR em IR representada matri Dfα a aplicação cialmente por fx (a, b) fy (a, b) tem-se f (α + v) = f (α) + Dfα (v) +R (v) , o que sugere a definição seguinte. Definição 2 Seja f : D ⊆ IR2 → IR e α = (a, b) ∈ intD. f é diferenciável em α se e só se existir uma bola aberta centrada em α e de raio r, Br (α) ⊆D, e uma aplicação linear Dfα de IR2 → IR, tais que: f (α + v) = f (α) + Dfα (v) + R (v) , (4) R (v) = 0, v→0 v com lim para qualquer vector v ∈IR2 que satisfaça a condição v < r. A aplicação linear Dfα referida na definição anterior diz-se o diferencial, derivada ou derivada total de f em α e representa-se habitualmente por f (α). O teorema que enunciamos a seguir mostra que esta definição é equivalente à apresentada inicialmente. Proposição 2 Seja f : D ⊆ IR2 → IR e α = (a, b) ∈ intD. Se f é diferenciável em α, então a aplicação linear Dfα é representada matricialmente por fx (a, b) fy (a, b) . Dem. Seja Dfα = s1 s2 , α = (a, b) , v = he1 + ke2 . A relação 4 pode então ser escrita na forma f (a + h, b + k) = f(a, b) + s1 h + s2 k + R (h, k) . (5) Fazendo h = 0 na relação anterior, tem-se f (a, b + k) = f (a, b) + s2 k + R (0, k) ⇒ f (a, b + k) − f (a, b) R(0, k) = s2 + . k k 11 1 6 / M a io / 2 0 0 1 = 0, conclui-se que Como lim R(0,k) k k→0 f(a, b + k) − f(a, b) = s2 ⇒ k→0 k s2 = fy (a, b). lim Fazendo agora k = 0 na relação 5, tem-se f (a + h, b) = f (a, b) + s1 h + R (h, 0) ⇒ f (a + h, b) − f (a, b) R(h, 0) = s1 + . h h = 0, conclui-se que Como também lim R(h,0) h h→0 f(a + h, b) − f(a, b) = s1 ⇒ k→0 h s1 = fx (a, b). lim A equação 4, válida para v < r, é chamada a fórmula de Taylor de 1a ordem para f (α + v) e fornece uma aproximação linear, Dfα (v) , para a diferença f (α + v) − f (α) . Desprezando R (v) podemos escrever f (α + v) − f (α) ≈ Dfα (v) . O erro que se comete ao fazer esta aproximação é portanto igual a R (v) , que é um termo de ordem inferior a v quando v → 0. Era isto, aliás, o que já acontecia com as funções reais de variável real. Relembrando um pouco este assunto, dizer que uma função real de variável real, f, pode ser aproximada linearmente em x = a, será poder escrevê-la na fórmula de Taylor com resto de primeira ordem: R1 (h) =0 |h|→0 h f (a + h) = f (a) + f (a) h + R1 (x) , com lim Repare-se que na vizinhança de a, a aproximação linear de f (x) é a função f(x) = f (a) + f (a) (x − a) = f (a) x + [f (a) − f (a) a] que representa a equação de uma recta com declive f (a) e ordenada na origem [f (a) − f (a) a]. 12 1 6 / M a io / 2 0 0 1 Exemplo 7 A função f (x) = ex , numa vizinhança do ponto 0, tem como aproximação linear a função y = x + 1. Como df = f (x0 ) dx então f ≈ f (x0 ) x. Assim, ex − e0 ≈ e0 (x − 0) , resultando ex ≈ x + 1. 2.5 2 1.5 1 0.5 -1 0 -0.5 0.5 x 1 Exemplo 8 A função do exemplo 6, f(x, y) = x2 y2 , tem como aproximação linear numa vizinhança do ponto (0, 0), o plano tangente de equação z = 0. Isto significa que numa vizinhança de (0, 0), x2 y 2 ≈ 0. Vamos agora apresentar a generalização dos resultados anteriores, a campos escalares definidos em IRn . 13 1 6 / M a io / 2 0 0 1 Definição 3 Seja f : D ⊆ IRn → IR e α = (α1 , . . . , αn ) ∈ intD. f é diferenciável em α se e só se existir uma bola aberta centrada em α e de raio r, Br (α), e uma aplicação linear Dfα de IRn → IR, tais que: f (α + v) = f (α) + Dfα (v) + R (v) , (6) R (v) = 0, v→0 v com lim para qualquer vector v ∈IRn que satisfaça a condição v < r. Proposição 3 Seja f : D ⊆ IRn → IR e α = (α1 , . . . , αn ) ∈ intD. Se f é diferenciável em α, então a aplicação linear Dfα é representada matricialmente por fx1 (α) . . . fxn (α) . Dem. Exercício. Vimos anteriormente que a existência das derivadas parciais não garante a diferenciabilidade de um campo escalar; mas o mesmo não se passa com a derivada total. Proposição 4 Seja: f : D ⊆ IRn → IR e α ∈ intD. Se f é diferenciável em α então f é contínua neste ponto. Dem. Pretende-se mostrar que lim f (x) = f (α) , ou de outro modo, x→α que lim f (α + v) = f (α)Como f é diferenciável em α, tem-se v→0 f (α + v) = f (α) + Dfα (v) + R (v) , R (v) = 0. v→0 v com lim Fazendo v → 0, na expressão anterior, resulta lim f (α + v) = lim f (α) + lim Dfα (v) + lim R (v) = v→0 v→0 v→0 = f (α) . v→0 pois por hipótese lim R (v) = 0 e qualquer aplicação linear é uma função v→0 contínua. 14 1 6 / M a io / 2 0 0 1 A afirmação recíproca não é verdadeira! Existem funções contínuas que não são diferenciáveis como o exemplo 5 mostra! Nem sempre é fácil verificar se uma função é diferenciável recorrendo à definição. Tem interesse, por isso, conhecer condições suficientes que garantam a diferenciabilidade de uma função. Proposição 5 Seja f um campo escalar definido num subconjunto D de IRn e α ∈ intD; se todas as derivadas parciais de f são continuas numa vizinhança de α então f é diferenciável nesse ponto. Dem. Omite-se a demonstração deste resultado. Exemplo 9 A função f (x, y) = x2 + 2xy + y 2 é diferenciável em qualquer ponto de IR2 , pois fx = 2x + 2y e fy = 2x + 2y são funções contínuas em qualquer ponto de IR2 . Interessa agora apresentar a definição de um conceito que será frequentemente utilizado daqui em diante. Definição 4 Quando uma função admite derivadas parciais continuas até à ordem p em todos os pontos de um conjunto S, diz-se de classe C p em S e representa-se por f ∈ C p (S). Se uma função tiver derivadas parciais contínuas, de qualquer ordem em todos os pontos de um conjunto S, diz-se de classe C ∞ , nesse conjunto. Uma função diz-se de classe C 0 no conjunto S se for contínua em S. Em face desta definição podemos pois afirmar que uma função de classe C numa vizinhança de um ponto (a, b) é diferenciável nesse ponto. 1 Exemplo 10 Nas figuras seguintes representam-se campos escalares com (desdiferentes comportamentos na vizinhança da origem: f (x, y) = x2xy +y 2 contínuo), g (x, y) = xy2 x2 +y 2 (prolongável por contínuidade mas com prolonga3 mento não diferenciável), h (x, y) = x2xy+y2 (com prolongamento por continuidade diferenciável). O campo escalar, w (x, y) = x3 + 3xy2 − 15x − 12y, constitui um exemplo de uma aplicação C ∞ (“suave”). 15 1 6 / M a io / 2 0 0 1 0.5 0 -0.5 -4 -4 4 2 0 0y x0 f (x, y) = 2 4 4 -4 0y -2 2 -2 -2 2 -2 xy x2 +y 2 2 x0 g (x, y) = -2 4 -4 xy 2 x2 +y2 500 10 -2 -10 4 -500 0y 2 x0 h (x, y) = 1.4 0 -4 0 2 -2 -4 4 -4 -2 4 2 0y x0 -2 2 -4 4 w (x, y) = x3 + 3xy2 − 15x − 12y xy 3 x2 +y2 Derivada Dirigida Neste parágrafo iremos apresentar o conceito de derivada segundo a direcção de um vector. Tendo em atenção, que a derivada de uma função pode ser encarada como a taxa de variação instantânea da função, o que se pretende estudar é qual a variação do campo escalar quando passa de um ponto a para um ponto x , de uma vizinhança de a. Por exemplo, se f (a, b) representar a temperatura de um ponto (a, b) numa sala com um aquecedor e uma janela aberta, é evidente que se nos movermos do ponto (a, b) em direcção à janela a temperatura irá diminuir, mas se nos movermos em direcção ao aquecedor, aumentará. Duma forma geral, um campo escalar varia de acordo com a direcção segundo a qual se passa de um ponto para outro. Exemplo 11 Seja f(x, y) = x2 + 2y2 um campo escalar de duas variáveis cuja representação gráfica é a superfície parabólica representada na figura 16 1 6 / M a io / 2 0 0 1 seguinte. 1 ◊2 A função na origem assume o valor 0. Quando se passa do ponto (0, 0) para o ponto (1, 1), (segundo a direcção da recta y = x), a função √ nesse ponto toma o valor 3. Mas, quando √ de (0, 0) passamos ao ponto ( 2, 0), segundo a direcção√do eixo OX, f( 2, 0) = 2. Repare-se que os pontos considerados, (1, 1) e ( 2, 0), estão à mesma distância da origem; a função, no entanto, “cresce mais rapidamente” na direcção da recta y = x, do que segundo o eixo dos xx. Sendo f : D ⊆ IR2 → IR, (a, b) um ponto interior de D, e v = (v1 , v2 ) um vector unitário1 qualquer de IR2 , define-se derivada da função f no ponto (a, b), segundo a direcção do vector v, como f ((a, b) + t (v1 , v2 )) − f (a, b) t→0 t lim e representa-se por fv (a, b). Em termos geométricos, esta derivada pode ser interpretada da seguinte forma: (x, y) = (a, b) + t (v1 , v2 ) , t ∈ IR, é a equação vectorial de uma recta s que passa no ponto (a, b) e tem a direcção do vector v = (v1 , v2 ); f ((a, b) + t (v1 , v2 )) é a restrição da função f a esses pontos. 1 Diz-se que v é um vector unitário se e só se a sua norma é igual a 1(v = 1). 17 1 6 / M a io / 2 0 0 1 O gráfico desta restrição pode ser obtido intersectando o gráfico de f(x, y) com um plano que contenha o ponto (a, b), o vector v e seja paralelo ao eixo OZ. z c z c A recta tangente ao gráfico da função z=f(a,b)+t(v1 ,v2) O gráfico da função z=f(a,b)+t(v1 ,v2) y b O a O a v x b y v x fv (a, b) representará o declive da recta tangente ao gráfico de z = f ((a, b) + t (v1 , v2 )) no ponto (a, b, f (a, b)) . Por outras palavras, a derivada dirigida de uma função f , num ponto α e segundo um vector v, representa a taxa de variação instantânea da função f nesse ponto e segundo a direcção do vector v. Exemplo 12 Calculemos a derivada da função f (x, y) = 3x2 + 2y, segundo a direcção do vector v = (3, 5), no ponto (1, 1); o vector v não é um vector unitário, pelo que vamos começar por definir um vector que tenha a mesma direcção e o mesmo sentido de v mas com norma igual a 1; esse vector pode ser o versor de v (representado por ev ): 5 3 . ev = √ , √ 34 34 fe v (1, 1) = lim t→0 = lim t→0 = lim f (1, 1) + t √334 , √534 − f (1, 1) f 1+ 3 1+ t √3 t, 1 + √5 t − f (1, 1) 34 34 2 √3 t 34 t→0 t +2 1+ √5 t 34 = = − (3 + 2) t √ 14 √ 1 √ = lim 34 952 + 27 34t = 34 t→0 1156 17 18 = 1 6 / M a io / 2 0 0 1 A definição apresentada generaliza-se facilmente para uma função definida num subconjunto de IRn . Definição 5 Seja f : D ⊆ IRn → IR, α ∈ intD e v um vector qualquer de IRn ; Chama-se derivada de f no ponto α, segundo o vector v, e representa-se por fv (α), ao seguinte limite quando este existe: lim t→0 f (α + tv) − f (α) t Chama-se derivada de f no ponto α segundo a direcção do vector v a derivada segundo o versor ev de v. As derivadas parciais de um campo escalar constituem casos particulares de derivadas direccionais; de facto, fazendo v = ei , i = 1, . . . , n, na definição 5 obtemos fe i (α) = 1.5 ∂f (α) . ∂xi O vector Gradiente Neste parágrafo iremos admitir que a função f : D ⊆ IRn → IR é diferenciável em α ∈ intD. Nestas condições define-se vector gradiente da função f no ponto α e representa-se por f (α) ou gradf (α) . ao vector cujas componentes são as derivadas parciais de f no ponto α, ∂f ∂f (α) , . . . , (α) . ∂x1 ∂xn Repare-se que, sendo (e1 , . . . , en ) a base canónica de IRn , f (α) = ∂f ∂f (α) e1 + · · · + (α) en . ∂x1 ∂xn Exemplo 13 Calculemos o gradiente da função f (x, y) = 3x2 +2y, no ponto (1, 1); fx (x, y) = 6x ⇒ fx (1, 1) = 6 e fy (x, y) = 2 ⇒ fy (1, 1) = 2. Assim gradf (1, 1) = f (1, 1) = (6, 2) = 6e1 + 2e2 . 19 1 6 / M a io / 2 0 0 1 Vejamos agora algumas propriedades do vector gradiente. Proposição 6 Se f : D ⊆ IRn → IR, for diferenciável em α, então: fv (α) = f (α) |v . Dem. Sendo f : D ⊂ IRn → IR diferenciável em α, tem-se f (α + tv) = f (α) + Dfα (tv) + R (tv) com R (tv) = 0. t→0 tv lim Ora f (α + tv) − f (α) = t→0 t R (tv) = = lim Dfα (v) + t→0 t = Dfα (v) = = f (α) |v. fv (α) = lim Em resumo, a derivada segundo um vector de uma função diferenciável pode ser obtida pelo produto interno entre o vector gradiente e o vector em questão. Proposição 7 Nas condições da proposição anterior, fv (α) = f (α) |v = f (α) v cos θ, (7) em que θ é o ângulo entre os vectores f (α) e v. Dem. Resulta imediatamente da caracterização de produto interno através da noção de norma e ângulo entre dois vectores. Proposição 8 A taxa de variação máxima de um campo escalar verifica-se na direcção e do vector gradiente (se f (α) = 0) e o valor absoluto desta taxa de variação é igual à norma do vector gradiente, isto é, |fe (α)| = f (α) . 20 1 6 / M a io / 2 0 0 1 Dem. Seja v um vector de norma 1; a igualdade 7 toma então a forma fv (α) = f (α) |v = f (α) cos θ. Assim, a derivada segundo a direcção de v, fv (α), é maxima quando o vector v tiver a direcção e do vector f (α) , pois nestas circunstâncias cos θ = 1. Mas a derivada segundo a direcção de e, fe (α), traduz precisamente a taxa de variação do campo escalar nesta direcção. Por outro lado, nesta direcção, |fe (α)| = f (α) . Exemplo 14 Qual a direcção de maior crescimento da função f (x, y) = x2 − y2 , no ponto (0, 1)? A direcção procurada é a direcção do vector gradiente de f em (0, 1), f (0, 1) = (0, −2) . 2 4 x2 -y =- z 2 2= 2 x -y 2 0 y 2= x 2- y x -1 1 4 y= y 2= 2 O vector gradiente “f(0,1). x 2- x- 1 1 A curva de nível que passa no ponto (0,1). -1 2 -1 Esta resposta é perfeitamente consistente com os gráficos apresentados anteriormente; de facto, se as linhas de nível representam o lugar geométrico dos pontos onde a função assume um valor constante, e o gradiente aponta na direcção de maior crescimento, sendo f uma função “razoavelmente bem comportada”, é natural esperar que o gradiente da função num determinado ponto, e a curva de nível que passa nesse ponto sejam perpendiculares. O teorema que apresentamos a seguir para n = 3, e cuja demonstração será deixada como exercício, traduz esta importante propriedade do vector gradiente. Proposição 9 Seja f : D ⊆ IR3 → IR uma função diferenciável em (a, b, c) ∈ intD; então f (a, b, c) é perpendicular à superfície de nível da função f que passa nesse ponto. Dem. Exercício. 21 1 6 / M a io / 2 0 0 1 Exemplo 15 Determinemos a equação do plano tangente à superfície esférica x2 + y2 + z 2 = 3 no ponto (1, 1, 1). É de fácil verificação que o ponto referido pertence à superfície indicada. Por outro lado, designando por f a função definida por f (x, y, z) = x2 + y2 + z 2 , sabemos que o vector gradiente de f no ponto (1, 1, 1) , ∇f (1, 1, 1) = (2, 2, 2) é normal à referida superfície no ponto em questão Assim a equação do plano tangente será: (x − 1) 2 + (y − 1) 2 + (z − 1) 2 = 0. As equações normais da recta normal à superfície no ponto (1, 1, 1) serão: y−1 z−1 x−1 = = 2 2 2 Generalizando este exemplo, suponha-se, agora, que uma dada superfície é caracterizada pela equação F (x, y, z) = C e que P = (a, b, c) é um ponto da referida superfície. Nestas circunstâncias sabemos que v =gradF (a, b, c) será um vector normal à superfície em P . Assim a equação do plano tangente e as equações da recta normal à superfície serão, respectivamente: 1. Equação do Plano Tangente à superfície F (x, y, z) = C em P = (a, b, c) : (x − a) ∂F ∂F ∂F (a, b, c) + (y − b) (a, b, c) + (z − c) (a, b, c) = 0 ∂x ∂y ∂z 2. Equações da Recta Normal à superfície F (x, y, z) = C em P = (a, b, c): ∂F ∂x x−a = (a, b, c) ∂F ∂y y−b = (a, b, c) ∂F ∂z z−c . (a, b, c) Exemplo 16 Consideremos agora o campo escalar z = f (x, y). Determinemos a equação do plano tangente ao gráfico de f no ponto (a, b, f (a, b)) bem como as equação cartesianas da recta perpendicular ao seu gráfico nesse ponto. 22 1 6 / M a io / 2 0 0 1 Nesta situação, os pontos do gráfico da função f são caracterizados pela condição f (x, y) − z = 0. Fazendo F (x, y, z) = f(x, y) − z, tem-se ∂F ∂x (a, b, f (a, b)) = ∂f ∂x (a, b) , ∂F ∂y (a, b, f (a, b)) = ∂f ∂y (a, b) , e ∂F ∂z (a, b, f (a, b)) = −1. 1. Equação do plano tangente à superfície z = f (x, y) em (a, b, f (a, b)) : z = (x − a) ∂f ∂f (a, b) + (y − b) (a, b) + f (a, b) . ∂x ∂y 2. Equações da recta normal à superfície z = f (x, y) em (a, b, f (a, b)) : y−b z − f (a, b) x−a = = ∂f ∂f −1 (a, b) (a, b) ∂x ∂y Referências [1] Apostol, T. M., Calculus, Reverté, 1977; [2] Azenha, Acilina e Jerónimo, M. A., Cálculo Diferencial Integral em IR e IRn , McGraw-Hill, 1995; [3] Lima, Elon Lages, Curso de Análise (Vol 1 e 2), IMPA, Projecto Euclides, 1995; [4] Piskounov, N., Calcul Différentiel et Intégral, MIR, 1976; [5] Taylor, A. E., Advanced Calculus, Xerox College Publishing, Massachusetts, 1972; [6] Wade, W. R., An Introduction to Analysis, Prentice Hall, 1995; 23 1 6 / M a io / 2 0 0 1
Download