Sistemas de Processamento Digital
Engenharia de Sistemas e Informática
Ficha 2
2005/2006
4.º Ano/ 2.º Semestre
Análise de Fourier Discreta no Tempo
Na ficha anterior vimos como é que os sistemas lineares e invariantes no tempo, podem ser representados
usando a sua resposta a um impulso unitário. Esta resposta, designada como resposta ao impulso unitário
h(n), permite calcular a resposta do sistema a uma qualquer entrada arbitrária x(n), usando a convolução
linear.
x(n) → h(n) → y ( n ) = h ( n ) * x ( n )
A representação da convolução baseia-se no facto de qualquer sinal poder ser representado por uma
combinação linear de impulsos escalados (i.e. modelados pela amplitude da amostra) e atrasados.
Contudo, quando um sistema é linear e invariante no tempo, surge uma representação que se apresenta
como mais útil. Esta baseia-se no conjunto de sinal complexo exponencial
{e } , e é designada por
jωn
Transformada de Fourier Discreta no Tempo.
Transformada de Fourier Discreta no Tempo (DTFT)
Se x(n)for absolutamente somável, isto é,
∑
∞
−∞
x ( n ) < ∞ , então a sua transformada de fourier discreta no
tempo (DTFT), é dada por:
X ( e jω ) = F ⎡⎣ x ( n )⎤⎦ =
∞
+
∑ x (n) e ω
ω
A transformada de fourier inversa discreta no tempo (IDTFT) de X ( e ) é dada por:
−j n
n=−∞
j
+
x (n ) = F-1 ⎡⎣ X ( e jω )⎤⎦ =
1
2π
π
ω
ω
∫π X ( e )e dω
j
j n
−
O operador F[.] transforma um sinal discreto x(n) numa função contínua complexa
X ( e jω ) de variável
real ω, designada por frequência digital, que é medida em radianos.
Exercício 1
Determine a transformada de Fourier Discreta no Tempo de x(n) = (0.5)n u(n).
Exercício 2
Determine a transformada de Fourier Discreta no Tempo da sequência de duração finita:
⎧1, 2, 3, 4,5⎫
⎬
↑
⎩
⎭
x(n) = ⎨
Propriedades
Periodicidade: A transformada de Fourier Discreta no Tempo
(
X ( e jω ) é periódica em ω com um período de 2π.
X ( e jω ) = X e j[ω + 2π ]
( ) (i.e., ω ∈ [0,2π ] ,ou[−π ,π ] , para análise e não
Portanto, precisamos apenas de um só período de X e
de todo o domínio −∞ < ω < ∞ .
Sistemas de Processamento Digital
)
Manuel A. E. Baptista
jω
1
( ) é conjugado simétrico.
X (e ) = X (e )
Simetria: Para uma sequência x(n) real, X e
jω
jω
ou
*
jω
Re ⎡⎣ X ( e − jω )⎤⎦ = Re ⎡⎣ X ( e jω )⎤⎦ (simetria par)
Im ⎡⎣ X ( e − jω )⎤⎦ = − Im ⎡⎣ X ( e jω )⎤⎦ (simetria ímpar)
X ( e − jω ) = X ( e jω ) (simetria par)
∠X ( e − jω ) = ∠X ( e jω ) (simetria ímpar)
( ) , precisamos apenas de considerar metade dum período de X ( e ) . Na prática,
Assim, para traçar X e
é escolhido tal que
jω
jω
ω ∈ [0,π ] .
Utilização do MATLAB
( ) numericamente, em
Se x(n) for de duração finita, então o MATLAB pode ser usado para calcular X e
qualquer frequência
jω
ω. Se calcularmos X ( e jω ) , em frequências equidistantes entre [0,π ] , então essa
pode ser implementada através duma multiplicação vectorial.
Para o efeito, vamos assumir que a sequência tem x(n) tem N amostras entre n1
( ) em,
necessariamente entre [0, N-1], e o que queremos é calcular X e
π
+
ωk =
M
≤ n ≤ nN (i.e., não
jω
k , k=0,1, …, M
[
]
( ) , pode ser escrita como
Que são (M+1) frequências igualmente espaçadas entre 0,π . Então X e
jω
X ( e jωk ) = ∑ e − j(π / M )knl x ( nl ) , k=0,1, …, M
N
l =1
{ ( )} e {X ( e )} são arranjados como vectores coluna x e X respectivamente. Pelo que temos
onde x nl
jωk
X = Wx
onde W é uma matriz (M+1) x N dada por
+
{
W= e
{} { }
− j(π / M)knl
}
; n1 ≤ n ≤ nN ,k = 0,1,...,M
Se arranjarmos ainda, k e nl como vectores linha k e n respectivamente, então
⎡
⎛ π
⎞⎤
W = ⎢exp ⎜ − j k Tn ⎟ ⎥
⎝ M
⎠⎦
⎣
No MATLAB, representam-se as sequências e os índices como vectores linha: por isso,
⎡
⎛ π
⎞⎤
X T = x T ⎢exp ⎜ − j nTk ⎟ ⎥
⎝ M
⎠⎦
⎣
Nota: nTk é uma matriz N x (M+1).
Agora XT pode ser implementada em MATLAB,
>> k = [0:M]; n = [n1:n2];
>> X = x * (exp (-j*pi/M). ^ (n’*k);
Sistemas de Processamento Digital
Manuel A. E. Baptista
2
Exercício 3
( )
Calcule a X e
jω
[
de x(n) = (0.5)n u(n), para 501 pontos equidistantes entre 0,π
]
e trace o módulo, o
ângulo e as partes real e imaginária.
Exercício 4
( ) (DTFT) da seguinte sequência de duração finita,
Determine numericamente a X e
jω
⎧1, 2, 3, 4,5⎫
⎬
↑
⎩
⎭
x(n) = ⎨
[
]
para 501 frequências equidistantes entre 0,π .
Exercício 5
Seja x(n) = (0,9 exp (jπ/3)n.
( ) e investigue a sua periodicidade. Considere 401 frequências equidistantes entre dois
Determine X e
[
jω
]
períodos −2π ,2π .
Exercício 6
Seja x(n) = (0,9 )n, −10 ≤ n ≤ 10 . Investigue a propriedade da simetria conjugada da DTFT.
Propriedades da DTFT
Além das propriedades anteriores, temos ainda as seguintes:
Linearidade: A DTFT é uma transformação linear, isto é,
F ⎡⎣α x1 (n) + β x 2 (n)⎤⎦ = α F ⎡⎣ x1 (n)⎤⎦ + β F ⎡⎣ x 2 (n)⎤⎦ , para todo α, β, x1(n) e x2(n).
Deslocamento no Tempo: Um deslocamento no domínio do tempo, corresponde a um deslocamento de
fase (desfasamento), isto é,
F ⎡⎣ x (n − k )⎤⎦ = X ( e jω ) e − jωk
Deslocamento na Frequência: Multiplicando por uma exponencial complexa, corresponde a um
deslocamento no domínio da frequência, isto é,
(
F ⎡⎣ x (n) e jω0n ⎤⎦ = X e (
j ω −ω0 )
)
Conjugado: A conjugação no domínio do tempo, corresponde à operação de inversão e conjugação no
domínio da frequência, isto é,
F ⎡⎣ x* (n )⎤⎦ = X* ( e − jω )
Inversão: A inversão no domínio do tempo, corresponde à inversão no domínio da frequência, isto é,
F ⎡⎣ x ( −n )⎤⎦ = X ( e − jω )
Simetria de Sequências reais: As sequências reais podem ser decompostas nas suas partes par e ímpar,
isto é,
x (n ) = x par (n ) + x ímpar (n ) , então
F ⎡⎣ x par (n)⎤⎦ = Re ⎡⎣ X ( e jω )⎤⎦
F ⎡⎣ x ímpar (n)⎤⎦ = j Im ⎡⎣ X ( e jω )⎤⎦
Convolução: Trata-se duma das propriedades mais importantes, que torna a análise de sistemas no domínio
da frequência mais conveniente.
F ⎡⎣ x1 (n) * x 2 (n)⎤⎦ = F ⎡⎣ x1 (n)⎤⎦ F ⎡⎣ x 2 (n)⎤⎦ = X1 ( e jω ) X 2 ( e jω )
Sistemas de Processamento Digital
Manuel A. E. Baptista
3
Multiplicação: Trata-se da propriedade dual da convolução.
(
)
+ 1
j ω −θ
F ⎡⎣ x1 (n) .x 2 (n)⎤⎦ = F ⎡⎣ x1 (n )⎤⎦ ∗ F ⎡⎣ x 2 (n)⎤⎦ =
X1 ( e jθ ) X 2 e ( ) dθ
∫
2π
Exercício 6: Considere x1(n) e x2(n) como duas sequências aleatórias de duração finita, distribuídas
uniformemente entre [0,1] em 0 ≤ n ≤ 10 . Verifique a propriedade da linearidade.
Exercício 7: Sejam x(n) uma sequência aleatória, uniformemente distribuída entre [0,1] entre 0 ≤ n ≤ 10 .
Verifique a propriedade da linearidade e y(n) = x(n-2). Verifique a propriedade do deslocamento no tempo.
Exercício 8: Para verificar a propriedade do deslocamento no domínio da frequência, utilize uma
aproximação gráfica. Para o efeito, considere,
x (n ) = cos (π n / 2 ) , 0 ≤ n ≤ 100 e y (n ) = e jπ n / 4 x( n )
Exercício 9: De forma a verificar a propriedade do conjugado, considere a sequência de valores complexos
definida em −5 ≤ n ≤ 10 com as partes reais e imaginárias definidas uniformemente entre [0,1]
Exercício 10: Neste exercício pretende-se verificar a propriedade da simetria de sinais reais.
( )
Para tal, considere x n = sin
(π n / 2 ) , −5 ≤ n ≤ 10 .
Representação na frequência de sistemas LTI
Resposta a uma exponencial complexa
Seja
x (n) = e jω0n a entrada dum sistema linear e invariante no tempo (LTI), representado pela resposta
impulsional h(n).
e jω0n → h(n) → h (n) ∗ e jω0n
Então,
∞
y (n) = h (n) ∗ e jω0n = ∑ h (k ) e
jω0 (n−k )
−∞
⎡
⎤
= ⎢ ∑ h (k ) e jω0k ⎥ e jω0n
⎣ −∞
⎦
= ⎡⎣ F ⎡⎣h (n)⎤⎦ ω = ω0 ⎤⎦ e jω0n
∞
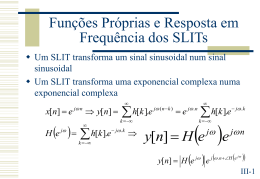
Resposta em Frequência
A DTFT da resposta impulsional designa-se por Resposta em Frequência (ou Função de Transferência) dum
sistema LTI e representa-se por,
+ ∞
H ( e jωn ) = ∑ h (n)e − jωn
−∞
Desta forma, podemos representar o sistema por
( )
x (n) = e jω0n → H ( e jω ) → y (n) = H e jω0 e jω0n
Assim, a sequência de saída é a exponencial de entrada, modificada pela resposta do sistema à frequência
( ) como a resposta em frequência, pois representa o que é multiplicado
ω0. Isto justifica a definição de H e
jω
pela exponencial complexa, para obter a saída y(n). Este resultado pode ser estendido a uma combinação
linear de exponenciais complexas, usando a linearidade dos sistemas LTI.
∑A e ω
j kn
k
k
Em geral, a resposta em frequência
Sistemas de Processamento Digital
H (e
jω
( )
→ h n →
∑ A H ( e ω )e ω
j
k
j kn
k
k
) é uma função complexa de ω.
Manuel A. E. Baptista
4
Resposta a sequências arbitrárias
A resposta em frequência pode ser generalizada a sequências arbitrárias absolutamente somáveis. Para o
efeito, considere-se
X ( e jω ) = F ( x ( n ) ) e Y ( e jω ) = F ( y ( n ) ) . Usando a propriedade da convolução,
teremos,
Y ( e jω ) = H ( e jω ) X ( e jω )
Então um sistema LTI pode ser representado no domínio da frequência por,
X ( e jω ) → H ( e jω ) → Y ( e jω ) = H ( e jω ) X ( e jω )
Exercício 11: Determine a resposta em frequência
H ( e jω ) dum sistema caracterizado por h(n)= (0,9)n u(n).
Trace o módulo e a fase da resposta.
Resposta em frequência a partir das equações diferença
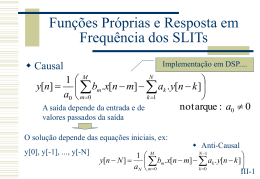
Quando um sistema LTI é representado por uma equação diferença,
N
M
l =1
m =0
y ( n ) + ∑ al y ( n − l ) = ∑ bm x ( n − m )
para determinar a sua resposta em frequência, precisa-se da resposta impulsional h(n). Seguidamente,
calcula-se
ser
H ( e jω ) a partir do conhecimento de h(n). Sabe-se que quando x (n) = e jω0n , então y(n) deverá
H ( e jω ) e jωn . Substituindo, na equação diferença, obtém-se
H ( e jω ) e jωn + ∑ al y ( n − l ) = ∑ bm x ( n − m )
N
M
l =1
m =0
M
ou
H ( e jω ) =
∑b e
− jωm
m
m =0
N
1 + ∑ al e − jωl
l =1
após cancelamento do factor comum e
jωn
.
Exercício 12: Um sistema LTI é especificado através duma equação diferença,
y(n) = 0,8 y(n-1) + x(n)
( ).
a) Determine H e
jω
b) Calcule e trace a resposta em estado estacionário yss(n) para
x(n) = cos (0.5πn) u(n)
Na prática as equações diferença, são de ordem superior à primeira, pelo que é necessário um procedimento
compacto para implementar uma expressão geral,
M
H ( e jω ) =
∑b e
− jωm
m
m =0
N
1 + ∑ al e − jωl
l =1
( ) em k=0, 1, …, K
Isso pode ser feito através duma multiplicação matriz vector. Se calcularmos H e
[
]
jω
frequências equidistantes, no intervalo 0,π , então
Sistemas de Processamento Digital
Manuel A. E. Baptista
5
M
H ( e jωk ) =
∑b e
− jωk m
m
m =0
N
1 + ∑ al e
, k=0, 1, …, K
− jωk l
l =1
{ } e {al } (com a0=1), {m=0, …., M), {l=0,…,N}, e {ωk } matrizes (ou vectores linha), então o
Se fizermos bm
( ) tornam-se
b exp ( − jm ω ) ; a exp ( − j l ω ) , respectivamente.
numerador e o denominador de H e
jω
T
T
( ) pode ser calculada usando a operação ./.
Agora a matriz H e
jω
Exercício 13: Um filtro passa-baixo de 3.ª ordem é descrito através duma equação diferença,
y(n) = 0,0181 x(n) +0,0543x(n-1)+0,0543x(n-2)+ 0,0181x(n-3)+1,76y(n-1)-1,1829y(n-2)+0,2781y(n-3).
Trace a resposta em módulo e fase deste filtro e verifique que se trata dum filtro passa baixo.
Sistemas de Processamento Digital
Manuel A. E. Baptista
6
Baixar