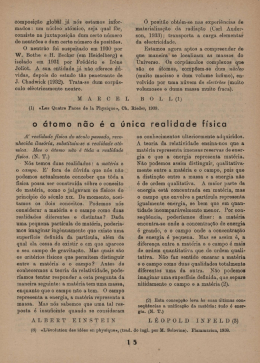
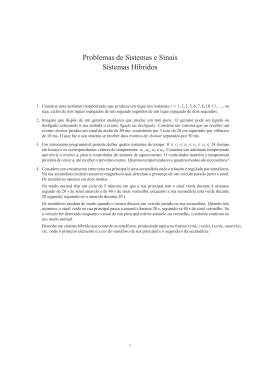
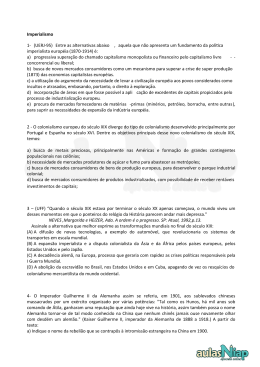
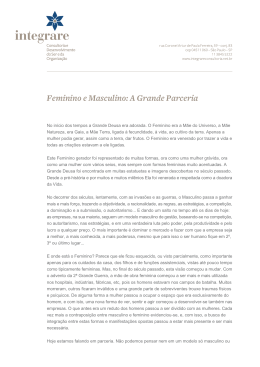
MODELAGEM E CONTROLE DE UM QUADRIMOTOR PVTOL TRANSPORTANDO UMA CARGA SUSPENSA Igor H. B. Pizetta∗ Alexandre S. Brandão† Mario Sarcinelli-Filho‡ ∗ † ‡ Instituto Federal de Ciência e Tecnologia do Espı́rito Santo Aracruz – ES, Brasil Departamento de Engenharia Elétrica, Universidade Federal de Viçosa Viçosa – MG, Brasil Programa de Pós-Graduação em Engenharia Elétrica, Universidade Federal do Espı́rito Santo Vitória – ES, Brasil Email: [email protected]@[email protected] Resumo— This work proposes the representation of the high level dynamic model of a quadrotor UAV with a suspended load, through Euler-Lagrange equations. The rotorcraft movement is restricted to the XZ plane of the Cartesian space, so that it performs like a PVTOL machine. A nonlinear controller is proposed to stabilize the quadrotor and the load, during positioning and trajectory tracking tasks. Finally, simulated results are presented in order to validate the proposal. Palavras-chave— Aerial robotics, UAV modelling, Control, Load transportation. Palavras-chave— Este trabalho propõe a representação de um modelo de alto nı́vel para um VANT com uma carga suspensa por um cabo através das equações de Euler-Lagrange. O movimento do veı́culo é restrito ao plano XZ do espaço cartesiano, desenvolvendo as tarefas como uma máquina PVTOL. Um controlador não linear é proposto para estabilizar o veı́culo com a carga durante tarefas de posicionamento e seguimento de trajetória. Finalmente, resultados simulados são apresentados a fim de validar a proposta. Palavras-chave— 1 Robótica aérea, Modelagem de VANT, Controle, Transporte de carga. Introdução Pesquisas utilizando veı́culos aéreos não tripulados (VANTs) tiveram um crescimento considerável nos últimos anos, em parte devido à sua alta aplicabilidade e ao avanço das tecnologias associadas a eles (aumento da capacidade de processamento, melhoria dos sensores e a miniaturização dos componentes e do veı́culo). Sua mobilidade tridimensional tem levado a uma grande variedade de aplicações, como a utilização em locais de difı́cil acesso e de alto risco, além da inspeção de grandes áreas. Dentre tais tarefas, pode-se citar aquelas relacionadas com segurança pública, gerenciamento ambiental, intervenção em ambientes hostis, manutenção de infraestruturas, agricultura de precisão e transporte de carga (Bestaoui e Slim, 2007; Chao et al., 2010). No que diz respeito ao transporte de carga, existem duas abordagens mencionadas na literatura. A primeira consiste na utilização de um VANT equipado com garras ou um suporte, que sustentará a carga junto ao veı́culo (Pounds et al., 2011). Este método aumenta a inércia do veı́culo, provocando uma diminuição de sua resposta dinâmica. A outra abordagem consiste no transporte de carga com a utilização de cabos ou tirantes (Nicotra et al., 2014; Goodarzi et al., 2014; Lee et al., 2013; Sreenath, Lee e Kumar, 2013; Palunko et al., 2012). Ela preserva a agilidade do veı́culo, porém cria graus de liberdade resultante do movimento de oscilação da carga. Cada grau de liberdade associado à carga suspensa é sub-atuado, dada a ausência de um atuador para realizar seu controle. Tal abordagem é tratada neste trabalho e corresponde à configuração ilustrada na Figura 2. Em (Sreenath, Michael e Kumar, 2013), um quadrimotor com uma carga suspensa por um cabo é considerado como um sistema hı́brido diferencialmente plano para lidar com o caso em que a tensão do cabo de sustentação vai a zero. A modelagem obtida e o controlador proposto envolvem a navegação no plano bidimensional. O controle é realizado através de um sistema com três camadas de malhas internas e externas, estabilizando o quadrimotor e regulando a atitude da carga (ou sua posição no plano). Em contrapartida, em (Goodarzi et al., 2014) foi considerado um quadrimotor com uma carga suspensa por um cabo, cujo modelo é descrito por um sistema composto por vários links interconectados. Um sistema de controle não linear geométrico é utilizado, a partir do modelo dinâmico simplificado, a fim de estabilizar assintoticamente a posição do veı́culo e manter o cabo em sua posição vertical. Neste contexto, este trabalho propõe uma modelagem de alto nı́vel não linear e uma estratégia de controle baseada em linearização por retroalimentação, para um quadrimotor com carga suspensa por um cabo, considerando o veı́culo como PVTOL (Planar Vertical Take off and Landing) (Hauser et al., 1992; Brandão, Gandolfo, Sarcinelli-Filho e Carelli, 2014). O modelo dinâmico subatuado do conjunto veı́culo– carga é considerado, e os efeitos da carga no veı́culo são tomados como perturbação no sistema. Neste trabalho, assim como em diversos outros de nosso grupo de pesquisa (Pizetta et al., 2014; Brandão, Barbosa, Mendoza, Sarcinelli-Filho e Carelli, 2014; Brandão, Gandolfo, Sarcinelli-Filho e Carelli, 2014), a plataforma AuRoRA foi utilizada na realização das simulação com diversas configurações do sistema com carga. A fim de apresentar detalhes do desenvolvimento, este trabalho é dividido da seguinte forma: a Seção 2 apresenta uma visão geral do modelo da aeronave com a massa suspensa, enfatizando as variáveis de controle e os graus de liberdade diretamente atuados. Na sequência, o controlador de alto nı́vel é desenvolvido na Seção 3. Por fim, a Seção 4 apresenta os resultados e as simulações e a Seção 5 destaca as principais conclusões do trabalho. 2 Modelo Dinâmico de um Quadrimotor com uma Carga Suspensa A modelagem do sistema foi realizada para o quadrimotor Ar.Drone, da Parrot, Inc. Um detalhe importante desse veı́culo é que os motores não são alinhados com os eixos b x e b y, como pode ser visto na Figura 1: eles são deslocados 45o ao redor do eixo b z. Dessa forma, para realizar um movimento lateral ou longitudinal, uma ação conjunta de todos os quatro propulsores se faz necessária. Contudo, considerando o veı́culo como um PVTOL, seus movimentos serão restritos ao plano XZ, i.e., não há deslocamentos no eixo y ou variações nos ângulos de rolagem (φ) e guinada (ψ), como ilustrado na Figura 2. Nesse veı́culo as forças f2 e f3 atuam conjuntamente para realizar os movimentos, assim como as forças f1 e f4 . Note-se que o quadrimotor é um sistema subatuado (Brandão et al., 2013), mesmo quando voando como um veı́culo PVTOL. A fim de apresentar a modelagem, a atitude do VANT em coordenadas generalizadas em 2D, T i.e., e q = e ξ e η e ηc , são definidas. Como não há movimento no plano Y Z, o vetor de T coordenadas torna-se e ξ = x z ∈ R2 , correspondente ao deslocamentos longitudinal e normal, de acordo com o sistema de referência inercial hei, s η = θ ∈ R, corresponde ao ângulo de arfagem (devido à restrição de movimento), de acordo com o sistema de referências espacial hsi, e b η = θc ∈ R correspondente ao ângulo de arfagem da carga em seu próprio sistema de referências hli. Considerando o quadrimotor como um corpo rı́gido livre no espaço, sujeito à ação de forças e torques externos, a função Lagrangiana L expressa em hei, representa a energia cinética total K menos a energia potencial U, é dada por L = K − U, sujeito à restrição de Euler-Lagrange d ∂L ∂L f − = . τ dt ∂ q̇ ∂q Como existem dois corpos no espaço livre, a aeronave e a carga, existem duas energias cinéticas e potenciais, de forma que a energia total é dada por 1 1 1 mẋ2 + mż 2 + Iyy θ̇2 2 {z 2 |2 } K= K1 1 2 1 1 + mc ẋ2c + mc z˙c 2 + I θ˙c 2 {z 2 } |2 K2 U1 U2 z f3,2 s z θ (x,z) l z f4,1 b x θ mg l s lcosθc x lsinθc (xc,zc) b y f1 f4 (4) b θc mcg e z (3) U = mgz + mc gzc , |{z} | {z } f2 b (2) Consideração 1 O cabo é rı́gido, inelástico, sem massa e os efeitos aerodinâmicos na carga são desprezados. θc f3 (1) z l x e x b x Figura 1: Visão de cima do Ar.Drone, da Parrot Inc., o VANT considerado neste trabalho. Figura 2: Os sistemas de coordenadas adotado para o VANT se movendo no plano XZ enquanto carrega a carga. onde K1 e U1 são associadas ao VANT e K2 e U2 são associadas à carga suspensa. m e mc são, respectivamente, as massas do veı́culo e da carga suspensa, Iyy e I são o momento de inercia do veı́culo e da carga, respectivamente, enquanto g é a aceleração da gravidade. (xc , zc ) é a posição da carga, a qual pode ser dada por xc = x − l sin θc (5) zc = z − l cos θc , (6) em termos do ângulo θc , do comprimento do cabo l e da posição do quadrimotor, como ilustrado na Figura 2. Para movimentos no plano XZ, a matriz de inércia é representada somente por seu termo Iyy , e o mesmo é válido para a carga. A velocidade angular Ω é representada por θ̇, de acordo com a mesma consideração. Aplicando (3) e (4) em (1), e depois em (2), o modelo de alto nı́vel, no sistema de referência inercial hei, é dado por f M(q)q̈ + C(q, q̇)q̇ + G(q) = , (7) τ onde m + mc 0 0 m + mc M(q) = 0 0 mc lsθc −mc lcθc 0 0 0 0 C(q, q̇) = 0 0 mc lsθc θ̇ mc lcθc θ˙c e −mc lcθc mc lsθc 0 Ic + mc l2 , 0 0 Iyy 0 0 0 0 0 (8) mc lsθc θ˙c mc lcθc θ˙c , 0 mc lsθc ẋ + mc lcθc ż (9) 0 (m + mc )g . G(q) = 0 mc lsθc g (10) Note-se que ci e si são as funções cos e sin, respectivamente. O modelo dinâmico descrito possui certas caracterı́sticas que devem ser mencionadas, como i. M(q) e M(q)−1 são simétricas e definidas positivas; 3 ii. C(q, 0) = 0 ∀q ∈ R ; ∂M − Ṁ é anti∂q simétrica se C(q, q̇) for obtida via sı́mbolos de Christopher. iii. N = Ṁ − 2C = q̇T 3 O Controlador Proposto Considerando que o comportamento de θc é modelado como uma perturbação aplicada ao sistema, (7) pode ser dividida em m M̄(q) = 0 0 0 m 0 0 0 0 , C̄(q, q̇) = 0 Iyy 0 0 0 0 0 0 , 0 0 Ḡ(q) = mg 0 e mc ẍ − mc lcθc θ̈c + mc lsθc θ̇c2 D̄ = mc z̈ + mc lsθc θ̈c + mc lcθc θ̇c2 + mc g . (11) 0 Portanto, o sistema fica sendo representado por M̄(q)q̈ + C̄(q, q̇)q̇ + Ḡ(q) + D̄ = f , τ (12) onde D̄ é a matriz de distúrbio modelada. Aplicando o conceito de linearização por retroalimentação para sistemas não lineares, podese propor o sinal de controle f = M̄(q)ν + C̄(q, q̇)q̇ + Ḡ(q) + D̄, (13) τ ˙ + κ3 tanh(κ4 q̃), e κi , onde ν = q̈d + κ1 tanh(κ2 q̃) com i = 1, · · · , 4 são matrizes de ganho diagonais positivas. Nas equações, o subscrito d indica que é a variável desejada enquanto q̃ = qd − q é o erro associado às variáveis. Adotando esta lei de controle, resulta, em malha fechada, que ¨ + κ1 tanh(κ2 q̃) ˙ + κ3 tanh(κ4 q̃) = 0, q̃ o que corresponde a um sistema assintoticamente estável, cujos erros convergem a zero para o tempo tendendo a infinito. Por sua vez, o comportamento do ângulo da carga θc , conforme (7), é governado por (Ic + mc l2 )θ¨c + +mc l[cθc (−ẍ + 2θ˙c ż) + sθc (z̈ + 2θ˙c ẋ + g)] = 0. 4 Resultados Software-in-the-Loop As simulações foram rodadas utilizando a Plataforma AuRoRA (Autonomous Robots for Research and Application) como uma estação de terra, conectada com um VANT virtual, representado por seu modelo, que aqui corresponde a um quadrimotor AR.Drone (Pizetta et al., 2014). No presente caso, a plataforma é um sistema softwarein-the-loop, onde o modelo dinâmico e cinemático, os sensores e atuadores, e o controlador utilizado são implementados, a fim de viabilizar a simulação do conjunto em estudo. A primeira simulação trata de uma tarefa de posicionamento, a qual complementa uma tarefa de pairar, i.e., o quadrimotor é programado para atingir uma determinada altitude sem que haja deslocamento horizontal. Na sequência, p4 p1 1.4 p2 p3 1.2 p6 p5 1 z [m] manobras verticais e longitudinais são realizadas, i.e., a aeronave deve alcançar uma determinada posição desenvolvendo um movimento de subida (ou descida) e com deslocamento simultâneo para frente (ou para trás). A segunda simulação é uma tarefa de seguimento de trajetória, na qual o veı́culo deve seguir uma trajetória em formato de 8. Os parâmetros utilizados são aqueles utilizados em (Brandão, Gandolfo, Sarcinelli-Filho e Carelli, 2014), com a adição da massa da carga, considerada como mc = 100 g, e do comprimento do cabo l = 0.50 m. 0.8 0.6 0.4 0.2 Quadrotor Load 0 −1.5 −1 −0.5 0 0.5 1 p4 p5 p6 40 50 60 x [m] (a) Mobilidade 3D. p1 p2 p3 20 30 1.5 1 0.5 x [m] 0 4.1 Tarefa de Posicionamento −0.5 −1 −1.5 Quadrotor − x Load − x c −2 0 10 70 time [s] (b) Deslocamento em x. p1 p2 p3 p4 p5 p6 20 30 40 50 60 1.5 z [m] 1 0.5 Quadrotor − z Load − zc 0 0 10 70 time [s] (c) Deslocamento em z. p1 p2 p3 p4 p5 p6 20 30 40 50 60 10 8 6 4 2 θ [degree] A tarefa de posicionamento é realizada utilizando 6 diferentes pontos no plano XZ, como mostrado na Figura 3(a). O primeiro objetivo é alcançar o ponto p1 , o que se trata de uma tarefa de hovering, ascendendo em 1 m, das coordenadas (0 m, 0 m) para (0 m, 1 m), sujeito a ação da carga. As Figuras 3(b) e 3(c) mostram a variação das coordenadas x e z ao longo do tempo, durante a tarefa de posicionamento. Todos os pontos, exceto o primeiro, possuem um intervalo de 10 s entre si e o controlador foi capaz de atingir o ponto desejado antes de extrapolá-lo. Vale mencionar que os pontos pi localizados nas figuras, estão associados ao momento no qual eles se tornam o objetivo do veı́culo, por exemplo, p2 tornase o ponto desejado no instante de tempo 20 s, sendo requerido alcançá-lo nos próximos 10 s. Após transcorrido esse tempo, o alvo será p3 . As variações angulares de θ e θc podem ser vistas na Figura 3(d), a qual mostra o esforço do controlador para rejeitar a perturbação imposta pela carga. Também é possı́vel visualizar que os movimentos de descida são mais difı́ceis de realizar que os de subida, devido à caracterı́stica do quadrimotor, que para realizar a tarefa de descida deve perder sua sustentação. O objetivo do controlador é estabilizar a aeronave, rejeitando a perturbação da carga, não tendo a intenção de guia-la. De fato, as oscilações angulares são causadas por sua dinâmica e o esforço do controlador para rejeitalas. Desta forma, após variar o ângulo para gerar seu movimento, pequenas oscilações ocorrem no veı́culo, a fim de estabilizar a carga. As forças fx e fz e o torque τ , aplicados pelo controlador no quadrimotor, são apresentados na Figura 4. A força fz é praticamente constante em toda a simulação, uma vez que esta força compensa a gravidade e gera os movimentos no eixo z. Mais ainda, as maiores variações das forças ocorrem nas mudanças dos objetivos, para gerar o movimento em direção ao ponto desejado. 0 −2 −4 −6 Quadrotor − θ Load − θ −8 c −10 0 10 70 time [s] (d) Deslocamento angular θ. Figura 3: Tarefa de posicionamento no plano XZ. p1 p2 p3 p4 p5 p6 0.2 0 fx −0.2 0 10 20 30 40 50 60 0 10 20 30 40 50 60 0 10 20 30 40 50 60 70 5 4.8 4.6 f z 4.4 70 0.1 0 τ −0.1 70 time [s] Figura 4: As forças fz e fx e o torque τ impostos ao VANT pelo controlador ao longo do tempo. 2 Tarefa de Seguimento de Trajetória. 1.6 1.4 1.2 z [m] A Figura 5(a) ilustra o desenvolvimento de uma trajetória em formato de 8. Porém, antes de iniciar, o veı́culo aumenta sua altitude até uma determinada cota e, apenas a partir daı́, começa a tarefa de seguimento de trajetória. Note que tanto o veı́culo quanto a carga conseguem realizar a tarefa sem oscilações expressivas de posição. Uma visão detalhada do comportamento das variáveis x e z ao longo do tempo pode ser vista nas Figuras 5(b) e 5(c), respectivamente. Em todas as figuras, a linha tracejada em preto mostra a referência do VANT. Em contrapartida, a carga se move de acordo com sua dinâmica e, portanto, não há referência a ser seguida. A Figura 5(d) ilustra pequenas oscilações angulares que acontecem no veı́culo e na carga. Isto ocorre devido à inércia da carga, que tende a oscilar quando o veı́culo começa um movimento, muda sua direção ou desacelera repentinamente. 1.8 1 0.8 0.6 0.4 Quadrotor Reference Load 0.2 0 −2 −1.5 −1 −0.5 0 x [m] 0.5 1 1.5 2 (a) Mobilidade 3D. 2 1.5 1 0.5 x [m] 4.2 0 −0.5 −1 Quadrotor − x Reference Load − x −1.5 c −2 0 5 10 15 20 25 30 35 40 45 time [s] (b) Deslocamento em x. 2.5 2 5 Considerações Finais 1 0.5 Quadrotor − z Reference Load − zc 0 0 5 10 15 20 25 30 35 40 45 time [s] (c) Deslocamento em z. 0.8 0.6 0.4 0.2 θ [degree] A possibilidade do transporte de carga com a utilização de veı́culos aéreos não tripulados é útil em diversas aplicações cotidianas. Neste trabalho, a problemática de um VANT transportando uma carga suspensa no plano XZ, segundo o modelo de uma máquina PVTOL, é considerada. A modelagem do conjunto VANT-Carga é apresentada com a utilização das equações de EulerLagrange e um controlador não linear de alto nı́vel é proposto aplicando o conceito de linearização por realimentação. Simulações são realizadas no intuito de validar o modelo e o controlador, para validar e efetivamente comprovar a estabilidade em tarefas de posicionamento e de seguimento de trajetória. O destacar do trabalho está na modelagem da carga como um distúrbio, ou seja, o controlador tem por finalidade guiar o veı́culo rejeitando o distúrbio causado pela carga, não guiá-la a uma posição predefinida. Esta é a proposta de próximo passos do grupo, cujo objetivo é guiar o posicionamento e/ou seguimento de trajetória da carga, de acordo com o movimento da aeronave. Assim como na Figura 4, a Figura 6 mostra as forças agindo sobre o veı́culo ao longo do tempo. Diferentemente da tarefa de posicionamento, o seguimento de trajetória não possui variações abruptas de referência, apresentando, portanto, manobras mais suaves e sinais de controle mais bem comportados. z [m] 1.5 0 −0.2 −0.4 −0.6 −0.8 −1 Quadrotor − θ Load − θc 0 10 20 30 40 50 60 70 time [s] (d) Deslocamento angular θ. Figura 5: Tarefa de seguimento de trajetória no plano XZ. p1 p2 p3 p4 p5 p6 0.02 0 f x −0.02 0 5 10 15 20 25 30 35 40 0 5 10 15 20 25 30 35 40 0 5 10 15 20 25 30 35 40 45 5.2 5 4.8 fz 4.6 45 0.01 0 τ −0.01 45 time [s] Figura 6: As forças fz e fx e o torque τ impostos ao VANT pelo controlador ao longo do tempo. Agradecimentos Os autores agradecem ao CNPq – Conselho Nacional de Desenvolvimento Cientı́fico e Tecnológico – e à FAPES – Fundação de Amparo à Pesquisa e Inovação do Espı́rito Santo, pelo apoio financeiro ao projeto. Eles também agradecem ao Instituto Federal do Espı́rito Santo, à Universidade Federal de Viçosa e à Universidade Federal do Espı́rito Santo, respectivamente, pelo suporte para participação neste trabalho de pesquisa. Dr. Brandão também agradece à FAPEMIG– Fundação de Amparo à Pesquisa de Minas Gerais – e à FUNARBE – Fundção Arthur Bernardes – pelo apoio financeiro concedido a este trabalho. Referências Bestaoui, Y. e Slim, R. (2007). Maneuvers for a quad- rotor autonomous helicopter, AIAA Conference and Exhibit, Rohnert Park, California. Brandão, A. S., Barbosa, J., Mendoza, V., Sarcinelli-Filho, M. e Carelli, R. (2014). A multi-layer control scheme for a centralized uav formation, Unmanned Aircraft Systems (ICUAS), 2014 International Conference on, Orlando, FL, USA, pp. 1181–1187. Brandão, A. S., Gandolfo, D., Sarcinelli-Filho, M. e Carelli, R. (2014). Pvtol maneuvers guided by a high-level nonlinear controller applied to a rotorcraft machine, 20: 172–179. Brandão, A. S., Sarcinelli-Filho, M. e Carelli, R. (2013). High-level underactuated nonlinear control for rotorcraft machines, Proceedings of the 2013 IEEE International Conference on Mechatronics - ICM2013, Vicenza, Italy, pp. 279–285. Chao, H., Cao, Y. e Chen, Y. (2010). Autopilots for small unmanned aerial vehicles: A survey, International Journal of Control, Automation, and Systems . Goodarzi, F., Lee, D. e Lee, T. (2014). Geometric stabilization of a quadrotor uav with a payload connected by flexible cable, American Control Conference (ACC), 2014, pp. 4925–4930. Hauser, J., Sastry, S. e Meyer, G. (1992). Nonlinear control design for slightly nonminimum phase systems: Application to v/stol aircraft, Automatica 28: 665–679. Lee, T., Sreenath, K. e Kumar, V. (2013). Geometric control of cooperating multiple quadrotor uavs with a suspended payload, Decision and Control (CDC), 2013 IEEE 52nd Annual Conference on, pp. 5510–5515. Nicotra, M., Garone, E., Naldi, R. e Marconi, L. (2014). Nested saturation control of an uav carrying a suspended load, American Control Conference (ACC), 2014, pp. 3585–3590. Palunko, I., Fierro, R. e Cruz, P. (2012). Trajectory generation for swing-free maneuvers of a quadrotor with suspended payload: A dynamic programming approach, 2012 IEEE International Conf. on Robotics and Automation (ICRA), pp. 2691–2697. Pizetta, I. H. B., Brandão, A. S. e Sarcinelli-Filho, M. (2014). A hardware-in-loop platform for rotary-wing unmanned aerial vehicles, Unmanned Aircraft Systems (ICUAS), 2014 International Conference on, Orlando, FL, USA, pp. 1146–1157. Pounds, P. E., Bersak, D. e Dollar, A. (2011). Grasping from the air: Hovering capture and load stability, Robotics and Automation (ICRA), 2011 IEEE International Conference on, pp. 2491–2498. Sreenath, K., Lee, T. e Kumar, V. (2013). Geometric control and differential flatness of a quadrotor uav with a cable-suspended load, 2013 IEEE 52nd Annual Conf. on Decision and Control (CDC), pp. 2269–2274. Sreenath, K., Michael, N. e Kumar, V. (2013). Trajectory generation and control of a quadrotor with a cable-suspended load a differentially-flat hybrid system, 2013 IEEE International Conf. on Robotics and Automation (ICRA), pp. 4888–4895.
Baixar