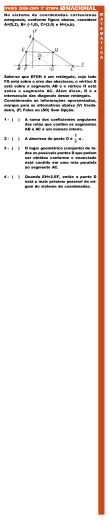
Apresentação Panorama Programa Relação de Títulos Relação de Autores Busca de Palavras FOTOTRIANGULAÇÃO PELO MÉTODO DOS FEIXES PERSPECTIVOS Francisco José da Cunha Silveira1 Jorge Luís Nunes e Silva Brito2 Universidade do Estado do Rio de Janeiro Programa de Pós-graduação em Engenharia de Computação – Geomática Rua São Francisco Xavier, 524 – Maracanã Rio de Janeiro – RJ – CEP 20559-900 1: [email protected] 2: [email protected] RESUMO A partir do tema geral fotogrametria, este trabalho apresenta como especificidade o desenvolvimento e testes de um modelo matemático para fototriangulação pelo método dos feixes perspectivos. O objetivo principal é tornar acessível o conhecimento sobre os princípios matemáticos e os métodos envolvidos nesta técnica. O modelo sugere algumas inovações na forma de numeração dos pontos de controle e fotogramétricos (contidos nas imagens fotográficas que compõem o bloco a ser ajustado), na obtenção das aproximações iniciais para os parâmetros (necessárias à solução do sistema de equações formado para o ajustamento), e na formação da matriz dos pesos. Foram feitos testes com imagens em diferentes resoluções geométricas e os resultados foram comparados com processos executados em softwares comerciais. Os resultados a que se chegou demonstraram a eficiência do modelo e a estreita correlação com os modelos matemáticos utilizados nas soluções comerciais. Palavras chaves: fotogrametria, ajustamento por feixes perspectivos. ABSTRACT The main subject of this work is photogrammetry. It presents a bundle block adjustment phototriangulation model, which aims to give access to theoretical aspects of this technique, as well as, the methods used in it. The model to be presented, brings some new approaches in numbering the ground control points and tie and check points at the photographic images, which compounds the adjusting block, in getting the necessary initial parameters approximations for solving the equation system, formed along the adjustment process, and in the weight matrix formation. Tests were done with different geometric resolutions and the results were compared with that obtained through commercial software solutions. The results showed the math model efficiency as well as its close correlation with the commercial solution math models. Keywords: photogrammetry, bundle block adjustment 1 INTRODUÇÃO Este trabalho integra o desenvolvimento da estação fotogramétrica digital educacional, Projeto E-Foto, que tem por objetivo tornar acessíveis a realização do processo fotogramétrico e os algoritmos que o possibilitam através de um sistema computacional de código aberto e gratuito. Um dos componentes do sistema é o módulo de fototriangulação. A recessão espacial é o processo pelo qual se obtém as coordenadas do centro de perspectiva e os ângulos de atitude do sensor no instante da aquisição da imagem. A interseção espacial possibilita a obtenção das coordenadas tridimensionais de um ponto qualquer no espaço objeto (terreno), a partir de suas coordenadas bidimensionais obtidas no espaço imagem. A fototriangulação é a realização da recessão espacial e da intercessão espacial em um único processo (Mikhail et al., 2001). O método dos feixes perspectivos permite que a fototriangulação seja executada para todas as imagens que compõem o espaço imagem e para todos os pontos fotogramétricos contidos nestas imagens em um único processo. O modelo aqui descrito foi concebido para aplicação em imagens obtidas com câmaras fotogramétricas aéreas. Apresentação Panorama Programa Relação de Títulos 2 MODELO MATEMÁTICO Relação de Autores Busca de Palavras Mínimos Quadrados — MMQ — para minimizar a função que quantifica o desvio-padrão do ajustamento, de forma que cada raio ajustado, originando-se em uma posição qualquer do espaço objeto, passe o mais próximo possível do seu homólogo no espaço imagem e do centro de perspectiva da imagem (figura1). A fototriangulação pelo método dos feixes perspectivos permite a reconstrução ótima da geometria dos feixes de raios luminosos formadores do espaço imagem no momento da aquisição das imagens fotográficas. O processo se vale do Método dos O(X0', Y0', Z0') (X0, Y0, Z0) c P'( , ) 0 Z' 0 Z Z0' Y' Y P(X', Y', Z') (X, Y, Z) Z' X0' X' Y0' X Figura 1 – Colinearidade entre os pontos nos espaços imagem e objeto Esta condição de colinearidade pode ser expressa pelas equações (1) e (2): ξ = ξ0 − c ⋅ r11 ( X − X 0 ) + r21 (Y − Y0 ) + r31 ( Z − Z 0 ) r13 ( X − X 0 ) + r23 (Y − Y0 ) + r33 ( Z − Z 0 ) (1) η = η0 − c ⋅ r12 ( X − X 0 ) + r22 (Y − Y0 ) + r32 ( Z − Z 0 ) r13 ( X − X 0 ) + r23 (Y − Y0 ) + r33 ( Z − Z 0 ) (2) Onde: c – distância focal calibrada (mm); x, h – coordenadas do ponto no espaço imagem (mm); x0, h0 – coordenadas do ponto principal (mm); X, Y, Z – coordenadas do ponto no espaço objeto (m); X0, Y0, Z0 – coordenadas do centro de perspectiva (m); rnm – elemento da matriz de rotação entre os sistemas XYZ e X’Y’Z’. A matriz de rotação (Kraus, 2000) incorpora os ângulos w, f e k, chamados ângulos de atitude que, juntamente com X0, Y0 e Z0, formam os parâmetros de orientação exterior, a serem obtidos no ajustamento. Também serão obtidas as coordenadas de terreno X, Y e Z para os pontos fotogramétricos. As funções de colinearidade, apesar de descreverem uma reta, não são lineares, pois combinam parâmetros lineares e angulares. O processo de ajustamento ocorrerá, então, pela utilização do MMQ combinado à Matriz Jacobiana de forma iterativa. Para isto, são necessárias aproximações iniciais dos valores das incógnitas e, a cada passo do processo, os valores alcançados para as incógnitas w, f, k, X0, Y0, Z0 para a orientação exterior e X, Y, Z para os pontos fotogramétricos, estarão mais próximos do valor verdadeiro e serão reintroduzidos como parâmetros, até que as diferenças a minimizar estejam dentro do limite desejado. 3 APROXIMAÇÕES INICIAIS Para ilustrar a explanação sobre a obtenção das aproximações inicias para as incógnitas e a formação das matrizes para o ajustamento, será adotado o bloco de imagens mostrado na figura 2. A numeração dos pontos de controle é feita em seqüência, transversalmente ao sentido do bloco, e em seguida os pontos fotogramétricos da mesma forma, para que possam ser obtidas matrizes de banda mínima, ou seja, para que os elementos não-nulos formem uma diagonal o mais estreita possível. Isto possibilita a solução do sistema com um menor esforço computacional. Este sistema de numeração difere daquele recomendado por (Burnside, 1985), pois verificou-se ser mais eficiente em alcançar a banda mínima para as matrizes. Para chegar às aproximações iniciais é necessário que se obtenha os parâmetros de Apresentação Panorama Programa Relação de Títulos Relação de Autores Busca de Palavras transformação entre o sistema imagem e o sistema objeto para cada imagem. Imagem 1 Imagem 3 Imagem 2 p3 p1 p8 p13 p5 p9 p14 p15 p6 p10 p11 p16 p7 p4 p12 p2 Imagem 4 Imagem 5 Ponto de controle Imagem 6 Ponto fotogramétrico Figura 2 – bloco de imagens fotográficas, pontos de controle e pontos fotogramétricos. O modelo de transformação adotado foi o afim geral (Brito e Coelho, 2002) que possui seis parâmetros, sendo necessários para constituir um sistema compatível, no mínimo, seis equações. Cada ponto contido na imagem resulta em duas equações e, desta forma, são necessários ao menos três pontos por imagem. Apesar das imagens que compõem o bloco apresentarem esta configuração, ocorre que suas coordenadas de terreno, com exceção dos pontos de controle, não são conhecidas. Os parâmetros de transformação de cada imagem serão obtidos executando-se um ajustamento, em que os pontos fotogramétricos entrarão como injunções. As equações para os pontos de controle serão : (5) a0 + a1⋅ ξ + a 2 ⋅η = X (6) b0 + b1 ⋅ ξ + b2 ⋅η = Y Para os pontos fotogramétricos: a0 + a1 ⋅ ξ + a 2 ⋅η − 1⋅ X = 0 (7) b0 + b1⋅ ξ + b2 ⋅η − 1⋅ Y = 0 (8) As matrizes para o ajustamento serão compostas pelas submatrizes descritas a seguir: 1 η ij Ai , j = 0 0 ξ ij 0 0 0 1 η ij 0 ξ ij (9) − 1 0 B= 0 − 1 a 0 a1 a 2 PTAi = b0 b1 b 2 X j XY j = Yj (10) (11) (12) Onde: i é o identificador da imagem; j é o identificador do ponto; h e x são as coordenadas em mm do ponto no espaço imagem; X e Y são as coordenadas planimétricas do ponto no sistema de terreno; a0, a1, a2, b0, b1, b2 são os parâmetros de transformação para as coordenadas da imagem i. A configuração das matrizes para o ajustamento é descrita no diagrama da figura 3, e constituirão a equação (13): (13) M ⋅X = L Apresentação Panorama Programa Relação de Títulos A solução da equação (13) será obtida recorrendo-se ao método de Boltz (Gemael, 1994), e desta forma: M 11 = M 1T ⋅ M 1 M 11 M 12 T M 22 = M 2 T ⋅ M 2 (16) (17) (18) m1 = M 1T ⋅ L m2 = M 2 T ⋅ L Busca de Palavras M 12 x1 m1 ⋅ = M 22 x 2 m 2 (19) O vetor dos parâmetros de transformação afim "x1", e das coordenadas (X,Y) dos pontos fotogramétricos "x2", serão obtidos através das equações (20) e (21) a seguir: (20) −1 T −1 −1 (14) (15) M 12 = M 1T ⋅ M 2 Relação de Autores x1 = ( M 11 − M 12 ⋅ M 22 x 2 = M 22 −1 ⋅ M 12 ) ⋅ m2 − M 22 −1 ⋅ (m1 − M 12 ⋅ M 22 T ⋅ M 12 ⋅ x1 ⋅ m 2) (21) Pode-se então reescrever a equação (13) na forma: Imagem 1 Imagem 2 Imagem 3 Imagem 4 Imagem 5 Imagem 6 p1 p5 p6 p8 p9 p10 p1 p3 p5 p6 p8 p9 p10 p13 p14 p15 p3 p8 p9 p10 p13 p14 p15 p2 p6 p7 p10 p11 p12 p2 p4 p6 p7 p10 p11 p12 p15 p16 p4 p10 p11 p12 p15 p16 1 36 Imagem 1 Imagem 2 Imagem 3 Imagem 4 Imagem 5 Imagem 6 A1,1 A 1,5 A 1,6 A 1,8 A 1,9 A 1,10 A2,1 A2,3 A 2,5 A 2,6 A 2,8 A 2,9 A 2,10 A 2,13 A 2,14 A 2,15 A3,3 A 3,8 A 3,9 A 3,10 A 3,13 A 3,14 A 3,15 A4,2 A 4,6 A 4,7 A 4,10 A 4,11 A 4,12 A5,2 A5,4 A 5,6 A 5,7 A 5,10 A 5,11 A 5,12 A 5,15 A 5,16 p6 p7 p8 60 p9 p10 p11 p12 p13 p14 p15 p16 1 1 1 PTA1 B B B PTA2 B B PTA3 B x1 B PTA4 B B B PTA5 B B B B B B B B M B B B B B B PTA6 36 37 XY5 XY6 XY7 XY8 XY9 XY10 XY11 XY12 XY13 XY14 XY15 60 XY16 X B B B B B B B A6,4 A 6,10 A 6,11 A 6,12 A 6,15 A 6,16 M1 37 p5 B B B B B x2 1 XY1 0 0 0 0 0 XY1 XY3 0 0 0 0 0 0 0 0 XY3 0 0 0 0 0 0 XY2 0 0 0 0 0 XY2 XY4 0 0 0 0 0 0 0 XY4 0 0 0 0 88 0 L M2 Ponto de controle Ponto fotogramétrico Figura 3 – Matrizes para obtenção dos parâmetros de transformação e coordenadas planimétricas dos pontos fotogramétricos A coordenada Z dos pontos fotogramétricos será a média das coordenadas Z dos pontos de controle contidos nas imagens componentes do bloco. Para calcular as aproximações iniciais de X0 e Y0, lança-se mão das coordenadas do Ponto Principal, PP, informado no certificado de calibração. Pelo princípio da colinearidade, o CP e o PP estarão alinhados, permitindo que se obtenham X0 e Y0, as coordenadas do CP no terreno. Desta forma, usando os parâmetros de transformação obtidos em (20) e substituindo x por x0 e h por h0 em (5) e (6), chega-se a X0 e Y0 para cada imagem. A aproximação inicial para o valor da coordenada Z0 será estimada através da relação: (22) Z 0 = c ⋅ EM EM é a escala da imagem, como segue: S p 2 S p3 S pm + +L+ s p 2 s p3 s pm EM = n (23) S e s são as normas de vetores definidos por pontos no espaço objeto e espaço imagem, respectivamente: S pm = ( X p − X m ) 2 + (Y p − Ym ) 2 + ( Z p − Z m ) 2 s pm = (ξ p − ξ m ) 2 + (η p − η m ) 2 (24) (25) Onde: (X, Y, Z) - coordenadas do ponto no terreno (m); (x, h) - coordenadas no espaço imagem (mm); p - identificador do primeiro ponto contido na imagem; m - identificador do ponto, maior que p; n - número de pontos contidos na imagem. Apresentação Panorama Programa Relação de Títulos Por se tratarem de imagens fotográficas aproximadamente verticais, considera-se que o valor verdadeiro dos ângulos w e f seja próximo de 0°, adotando-se este valor para a aproximação inicial. Há que se ressaltar, contudo, que este procedimento não se aplica a imagens oblíquas. Para estabelecer o valor aproximado do ângulo k, que expressa a direção do vôo, é necessário estimar a posição da imagem em relação ao terreno. Relação de Autores Busca de Palavras Primeiramente, transformam-se para o sistema de terreno as coordenadas da marca fiducial que aponta para a direção do vôo (na figura 4, marca fiducial 1) , usando os mesmos parâmetros calculados em (20), de forma semelhante ao cálculo de X0 e Y0. Com as coordenadas (X1,Y1) assim obtidas e as coordenadas já calculadas do CP no terreno, (X0,Y0), pode-se estimar o ângulo k. figura 4 - Disposição das marcas fiduciais e direção do vôo (X0,Y0) e (X1,Y1) faz com o eixo das abscissa do sistema de terreno: Verifica-se inicialmente se k é 0, 90, 180 ou 270 graus. Assim, têm-se: ∆X = X 1 − X 0 ∆Y ∆X α = arctan (26) (27) ∆Y = Y 1 − Y 0 (29) Em seguida, faz-se o estudo do quadrante e determinação de k: Se (DY = 0 e X1 > X0), k = 0 Se (DY = 0 e X1 < X0), k = 180 Se (DX = 0 e Y1 > Y0), k = 90 Se (DX = 0 e Y1 < Y0), k = 270 Se (DY > 0 e DX > 0), k = a Se (DY > 0 e DX < 0), k = 180 - a Se (DY < 0 e DX < 0), k = 180 + a Se (DY < 0 e DX > 0), k = 360 - a (28) Se nenhuma das condições em (28) for satisfeita, calcula-se o ângulo que a reta descrita por (30) Y 90° Y1 X0,Y0 180° X1 X1 0° X Y1 270° Figura 5 - Possibilidades de ocorrência do ângulo α 3 AJUSTAMENTO POR FEIXES PERSPECTIVOS Inicialmente, as equações de colinearidade serão escritas na forma de funções de suas variáveis: Apresentação Panorama Programa Relação de Títulos Relação de Autores Busca de Palavras fξ (ω , ϕ , κ , X 0, Y 0, Z 0, X , Y , Z ) = ξ 0 − c ⋅ r11 ( X − X 0 ) + r21 (Y − Y0 ) + r31 ( Z − Z 0 ) r13 ( X − X 0 ) + r23 (Y − Y0 ) + r33 ( Z − Z 0 ) (31) fη (ω , ϕ , κ , X 0, Y 0, Z 0, X , Y , Z ) = η 0 − c ⋅ r12 ( X − X 0 ) + r22 (Y − Y0 ) + r32 ( Z − Z 0 ) r13 ( X − X 0 ) + r23 (Y − Y0 ) + r33 ( Z − Z 0 ) (32) Pelo princípio da colinearidade, inserindo-se os parâmetros w, f, k, X0, Y0, Z0, X, Y, Z em (31) e (32), obtém-se (xc,hc), coordenadas no espaço imagem calculadas, para o ponto de controle de coordenadas observadas (X,Y,Z) em questão. Ocorre que w, f, k, X0, Y0, Z0, que são os parâmetros da orientação exterior que se deseja conhecer, serão, num primeiro momento, aproximações. Portanto, (xc,hc), assim obtidos, divergirão dos valores (xm,hm), coordenadas do espaço imagem observadas (medidas) para o mesmo ponto. O objetivo do ajustamento por feixes perspectivos é fazer com que a diferença entre as coordenadas calculadas (xc,hc) e as medidas no espaço imagem (xm,hm) seja menor ou igual a um valor estipulado como aceitável, para todos os pontos contidos nas imagens que compõem o bloco. Para que o sistema seja compatível, é necessário que o número de incógnitas seja menor ou igual ao número de equações. Têm-se 6 incógnitas para cada imagem (os parâmetros da orientação exterior) e 3 para cada ponto fotogramétrico (suas coordenadas de terreno). Cada ponto de controle ou fotogramétrico acrescenta ao sistema duas equações por imagem em que estejam contidos. O número de incógnitas e o de equações serão dados, respectivamente, pelas equações (33) e (34), a saber: nInc = n Im gs × 6 + nPFt × 3 (33) n Im gs nEq = nPC (i) + nPF (i) × 2 i =1 (34) ∑ Onde: nInc - número de incógnitas; nImgs - número de imagens fotográficas do bloco; nPFt - número total de pontos fotogramétricos; nEq - número de equações do sistema; nPC(i) - número de pontos de controle na imagem i; nPF(i) - número de pontos fotogramétricos contidos na imagem i. Se a condição de compatibilidade for, desta forma, satisfeita, o sistema constituído em (13) também o será, pois possui uma incógnita a menos por ponto fotogramétrico. Para o ajustamento do bloco tomado como exemplo (figura 2), a compatibilidade do sistema se verifica, como segue: nInc = 6 x 6 + 12 x 3 = 72 Eq = (6 + 10 + 7 + 6 + 9 + 6) x 2 = 88 Como já mencionado, o ajustamento ocorrerá pelo MMQ associado à Matriz Jacobiana. A formação das matrizes Jacobianas para os pontos de controle e para os pontos fotogramétricos será, respectivamente: ∂ξ X0 JO = ∂η X 0 ∂ξ Y0 ∂η Y0 ∂ξ Z0 ∂η Z0 ∂ξ JF = X ∂η X ∂ξ Y ∂η Y ∂ξ Z ∂η Z ∂ξ ∂ξ ω ∂η ω ϕ ∂η ϕ ∂ξ κ ∂η κ (35) (36) A configuração das matrizes para o ajustamento será a seguinte: Matriz “A” – conforme o diagrama da figura 6, onde: JO(Oi,Xj) é a matriz jacobiana (35) para o ponto j contido na imagem i; JF(Oi,Xj) é a matriz jacobiana (36) para o ponto fotogramétrico j contido na imagem i; Oi são os parâmetros da orientação exterior da imagem “i”; Xj são as coordenadas (X,Y,Z) para o ponto j. O vetor “L” - será composto pelas diferenças entre as coordenadas observadas (medidas) (ξmi,j , ηmi,j) e as coordenadas calculadas (ξ(Oi,Xj) , η(Oi,Xj)) para cada ponto de controle ou fotogramétrico “j” contido na imagem “i”; Matriz “P” - a matriz dos pesos “P” será, em um primeiro momento, a matriz identidade de ordem igual ao número de equações do sistema, calculado em (34). A solução do sistema se dará pelo método de Boltz . Para tanto, faz-se: N 22 = A2T ⋅ A2 (37) N 11 = A1 T ⋅ P ⋅ A1 (38) (39) N12 = A1T ⋅ P ⋅ A2 n1 = A1T ⋅ P ⋅ L T n 2 = A2 ⋅ L (40) (41) Onde A1 e A2 são submatrizes da matriz A (figura 6). Desta forma, pode-se escrever as equações normais como se segue: Apresentação Panorama Programa Relação de Títulos Relação de Autores Busca de Palavras Figura 6 - Configuração da matriz A N11 N12 T N12 x1 n1 ⋅ = N 22 x 2 n 2 (42) Se no bloco a ser ajustado não houver pontos fotogramétricos, o sistema se reduzirá a: [N11] ⋅ [x1] = [n1] (43) N11 será composta por matrizes de dimensão 6 x 6, tantas quantas forem as imagens, N22 será composta por matrizes 3 x 3, tantas quantos forem os pontos fotogramétricos. N12 terá, assim, a dimensão (nImgs x 6) + (nPF x 3), onde nImgs é o número de imagens fotográficas que compõem o bloco e nPF é o número total de pontos fotogramétricos (figura 7). Se o sistema for do tipo descrito em (43), a solução das equações normais será: x1 = N11−1 ⋅ n1 (44) De outro modo, se o sistema for do tipo descrito em (42), recorre-se ao particionamento das matrizes. Assim: x1 = ( N11 − N12 ⋅ N 22 −1 ⋅ N12 T ) −1 ⋅ ( n1 − N12 ⋅ N 22 −1 ⋅ n2) x 2 = N 22 −1 ⋅ n 2 − N 22 −1 (45) T ⋅ N12 ⋅ x1 (46) A inversão das matrizes N11 e N22 pode ser executada invertendo-se separadamente cada uma das submatrizes que compõem sua diagonal, minimizandose a necessidade de grandes capacidades de processamento para blocos compostos por muitas imagens fotográficas ou com muitos pontos fotogramétricos. Os vetores x1 e x2 assim obtidos serão as correções aos valores iniciais das incógnitas, sendo somados a estas e reintroduzidos no sistema para uma nova iteração até que todos os componentes lineares e angulares atinjam valores menores ou iguais aos estipulados como critérios de parada. Quando isto tiver ocorrido, considera-se que os valores atingiram a convergência no nível de precisão desejado. Após o ajustamento, que resulta nos parâmetros de orientação exterior e nas coordenadas dos pontos fotogramétricos, é conveniente que se avalie a qualidade dos resultados obtidos. Esta avaliação será feita confrontando-se as coordenadas dos pontos de controle medidas em campo (e usadas no ajustamento), com as coordenadas dos mesmos pontos calculadas a partir dos parâmetros de orientação exterior obtidos no ajustamento. As diferenças serão os resíduos. Como o ajustamento por feixes perspectivos pressupõe a imagem fotográfica como unidade elementar, os resíduos das coordenadas dos pontos devem ser calculados de forma independente para cada imagem, e não por interseção espacial, pois pode haver pontos que estejam contidos em somente uma imagem, ou o ajustamento pode estar sendo feito para uma imagem fotográfica apenas (ressecção espacial). Ocorre que o sistema de imagem fornece apenas duas coordenadas para o ponto, que no terreno tem três, o que levará a um sistema incompatível. Adotou-se, então, o resíduo das coordenadas X e Y, possíveis de serem calculados a partir dos parâmetros advindos de uma única imagem. Apresentação Panorama Programa Relação de Títulos Se o valor dos resíduos obtidos a partir dos resultados do ajustamento não estiver dentro de um limite estipulado, os mesmos constituirão uma matriz de pesos, usada em um novo processo de ajustamento. A matriz "A" (figura 6) utilizada para o ajustamento é composta das derivadas das equações de colinearidade para ξ (abcissas) e η (ordenadas). A matriz dos pesos será então composta de forma que os pesos, advindos dos resíduos das coordenadas X, correspondam às equações para ξ, e os das coordenadas Y, às equações para η. Os pesos para os pontos fotogramétricos serão mantidos com o valor 1. Desta Relação de Autores Busca de Palavras forma, quanto menor forem os resíduos dos pontos de controle, maior importância relativa estes pontos terão no ajustamento. Quando o resíduo tender a zero, o peso para a coordenada correspondente tenderá a infinito. Isto garante que o bloco de imagens não sofrerá deformação no ajustamento. Com a matriz dos pesos estabelecida, inicia-se um novo ajustamento, utilizando, como aproximações iniciais, os parâmetros de orientação exterior obtidos no ajustamento imediatamente anterior, e assim sucessivamente, até que os resíduos atinjam o valor considerado aceitável como limite. 1 36 37 Imagem 1 Imagem 2 Imagem 3 Imagem 4 Imagem 5 Imagem 6 p5 p6 p7 p8 p9 72 p10 p11 p12 p13 p14 p15 p16 1 1 6x6 6x6 6x6 N12 n1 6x6 N11 6x6 6x6 36 37 3x3 3x3 3x3 3x3 3x3 T N12 N22 3x3 n2 3x3 3x3 3x3 3x3 3x3 3x3 72 Figura 7 - Diagrama das equações normais 4 TESTES E ANÁLISE DOS RESULTADOS O modelo foi testado com um par de imagens da área da Uerj, campus Maracanã, e teve seus resultados comparados com outros processos de fototriangulação, produzidos por softwares comerciais, realizados por (Raivel e Souza Filho, 2003). Neste sentido, foram calculadas, também, coordenadas de pontos fotogramétricos no processo de fototriangulação. Estas coordenadas foram comparadas com coordenadas observadas para os mesmos pontos. Foram adotados como critério de parada nos testes 0,001m para os valores lineares e 0,001grau para os valores angulares. As diferenças que foram percebidas entre os resultados das diferentes fototriangulações deveram-se, principalmente, às características dos dados utilizados para o processamento. As fototriangulações realizadas com o modelo proposto tiveram como dados de entrada somente três pontos de controle e dois pontos fotogramétricos, enquanto que, nos softwares utilizados, podem ter sido usados uma maior quantidade de pontos de controle ou pontos de controle diferentes. Outro fato importante é que as coordenadas matriciais (coluna, linha), medidas no espaço imagem para o modelo ora proposto (AFP), têm precisão unitária (espaço discreto), que no terreno representa uma incerteza de 0,24 m (diagonal do pixel em 1200 dpi), enquanto que, nos softwares utilizados, estas coordenadas têm precisão milesimal (nível de subpixel). Os softwares utilizados permitem a especificação do sistema de projeção em que se encontram as coordenadas de terreno para os pontos de controle, efetuando a correção de possíveis distorções causadas por esta projeção, o que certamente contribuiu para que os resultados fossem diferentes. Os pontos de controle utilizados para os testes não eram de fácil identificação nas imagens, permitindo dubiedade das medições executadas por diferentes operadores. Levando em consideração o exposto, ao analisar os resultados dos testes, pode-se afirmar que: - Os resultados obtidos com as imagens em 600 dpi indicam que os processos realizados com os softwares Erdas e Socet Set e o modelo proposto são compatíveis em termos de precisão, pois ao comparar os resultados obtidos com o Erdas e com o modelo, com o Socet Set e com o modelo e entre os dois softwares comerciais, constatou-se que as diferenças são, para todas as Apresentação Panorama Programa Relação de Títulos comparações, aproximadamente de mesma magnitude, conforme apresentado na tabela 1. - De acordo com a teoria do limite central, a média de observações independentes está mais próxima do valor verdadeiro do que qualquer das observações tomada isoladamente. A partir desta afirmação, entendendo cada uma das fototriangulações como um conjunto de observações independente, realizada por um operador diferente para o mesmo bloco de imagens, fez-se a Relação de Autores Busca de Palavras média dos resultados obtidos com os softwares comerciais e o obtido pelo modelo proposto para as imagens em 1200 dpi (tabela 2). Pôde-se constatar que o resultado do modelo proposto está de acordo com os resultados obtidos com os softwares comerciais, pois, ao aumentar a resolução, os valores se encontram mais próximos da média, evidenciando a eficiência do modelo. TABELA 1 - RESULTADOS OBTIDOS COM AS IMAGENS EM 600DPI AFP (a) Imagem 16 Imagem 17 Erdas (b) |(a)-(b)| Socet Set (c) |(a)-(c)| |(b)-(c)| X0 (m) 680613,518 680608,367 5,151 680599,878 13,640 8,489 Y0 (m) 7465082,322 7465086,527 4,205 7465090,326 8,004 3,799 Z0 (m) 1318,247 1315,526 2,721 1313,840 4,407 1,686 w (graus) 2,051 1,956 0,095 1,890 0,161 0,066 f (graus) -0,437 -0,711 0,274 -1,003 0,566 0,292 k (graus) -1,051 -1,040 0,011 -1,026 0,025 0,014 X0 (m) 681312,389 681320,022 7,633 681310,907 1,482 9,115 Y0 (m) 7465067,710 7465078,239 10,529 7465081,592 13,882 3,353 Z0 (m) 1319,384 1318,109 1,275 1320,138 0,754 2,029 w (graus) 1,150 0,785 0,365 0,737 0,413 0,048 f (graus) -1,124 -0,827 0,297 -1,143 0,019 0,316 k (graus) -1,814 -1,788 0,026 -1,769 0,045 0,019 TABELA 2 - COMPARAÇÃO DOS RESULTADOS OBTIDOS POR PROCESSO DIGITAL COM A MÉDIA DOS RESULTADOS OBTIDOS COM AS SOLUÇÕES COMERCIAIS AFP 1200 Imagem 16 Imagem 17 Média AFP 1200 Erdas 300 Erdas 600 Socet Set 600 X0 (m) 680604,933 680605,663 0,730 3,080 2,704 5,785 Y0 (m) 7465090,870 7465087,674 3,196 1,504 1,147 2,652 Z0 (m) 1317,118 1316,032 1,086 2,698 0,506 2,192 w (graus) 1,769 1,910 0,141 0,025 0,046 0,020 f (graus) -0,768 -0,763 0,005 0,189 0,052 0,240 k (graus) -1,145 -1,072 0,073 0,078 0,032 0,046 X0 (m) 681317,250 681319,577 2,327 8,225 0,445 8,670 Y0 (m) 7465080,893 7465081,310 0,417 2,788 3,071 0,282 Z0 (m) 1321,070 1318,802 2,268 0,643 0,693 1,336 w (graus) 0,837 0,672 0,165 0,178 0,113 0,065 f (graus) -0,999 -0,825 0,174 0,319 0,002 0,318 k (graus) -1,818 -1,777 0,041 0,004 0,011 0,008 A pequena diferença dos resultados obtidos com o modelo proposto e o software Erdas (tabela 3) são decorrentes do fato de, neste último, o modelo matemático ser o self-calibrating bundle block adjustment (ajustamento por feixes perspectivos com auto calibração), que inclui a distância focal calibrada como uma das incógnitas do sistema, tomando como aproximação inicial a do certificado de calibração, que é um valor médio. Isto resulta em uma distância focal diferente para cada feixe ajustado, conforme ocorre em realidade, pelo fato das lentes conterem distorções. TABELA 3 - COMPARAÇÃO DOS RESULTADOS PARA A ORIENTAÇÃO EXTERIOR OBTIDOS A PARTIR DOS MESMOS DADOS DE ENTRADA COM IMAGENS EM 1200 DPI Apresentação Panorama Imagem 16 Imagem 17 Ponto 11711 Ponto Uerj Programa Relação de Títulos Relação de Autores Busca de Palavras AFP (a) Erdas (b) |(a)-(b)| X0 (m) 680604,933 680604,740 0,193 Y0 (m) 7465090,870 7465091,373 0,503 Z0 (m) 1317,118 1317,089 0,029 w (graus) 1,769 1,754 0,015 f (graus) -0,768 -0,776 0,008 k (graus) -1,145 -1,149 0,004 X0 (m) 681317,250 681316,462 0,788 Y0 (m) 7465080,893 7465079,613 1,280 Z0 (m) 1321,070 1321,208 0,138 w (graus) 0,837 0,706 0,131 f (graus) -0,999 -0,933 0,066 k (graus) -1,818 -1,783 0,035 X (m) 680541,006 680540,920 0,086 Y (m) 7464680,176 7464680,050 0,126 Z (m) 11,345 10,753 0,592 X (m) 680931,229 680931,187 0,042 Y (m) 7465299,796 7465299,713 0,083 Z (m) 68,840 68,869 0,029 5 CONCLUSÕES O modelo apresentado se mostrou eficiente e preciso, mesmo em comparação com os modelos adotados em softwares comerciais, atingindo plenamente o propósito de proporcionar a realização da fototriangulação para imagens aéreas. Como módulo integrante da estação fotogramétrica digital educacional – Projeto E-Foto – trará ao usuário a possibilidade de conhecer todas as etapas necessárias ao processo de fototriangulação. 6 REFERÊNCIAS BIBLIOGRÁFICAS Brito, J. L. N. S.; L. Coelho, 2002, Fotogrametria digital, Instituto Militar de Engenharia, Rio de Janeiro. Burnside, C. D., 1985, Mapping from aerial photographs, Halsted Press, New York, 348 páginas. Gemael, C., 1984, Introdução ao ajustamento de observações: aplicações geodésicas , Ed. UFPR, Curitiba, 322 páginas. Kraus, K., 2000, Photogrammetry v. 1: Fundamental and standard processes, Dümmlerbuch, Vienna, 398 páginas. Mikhail, E. M.; J. S. Bethel e J. C. McGlone, 2001. Introduction to Modern Photogrammetry , John Wiley & Sons, Inc., New York, 480 páginas. Raivel, J. P. C.; L. A. Souza Filho, 2003, Trabalho n° 4: orientação exterior, Fotogrametria digital, PGEC – Uerj. 7 AGRADECIMENTOS Os autores gostariam de agradecer o apoio da Universidade do Estado do Rio de Janeiro – UERJ e do Conselho Nacional de Desenvolvimento Científico e Tecnológico – CNPq, pelo apoio institucional e financeiro recebidos.
Baixar