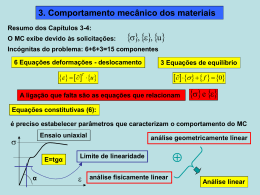
Cap. 5. Comportamento mecânico dos materiais 1. Justificação da existência das relações constitutivas 2. Linearidade física 3. Definição de constantes elásticas 3.1 Módulo de Young 3.2 Lei de Hook 3.3 Efeito de Poisson 3.4 Módulo de corte (distorção) 3.5 Módulo de volume 4. Definições ligadas ao comportamento do material 5. Materiais homogéneos isotrópicos em análise linear 5.1 Lei de Hook generalizada 5.2 Composição da matriz de rigidez e de flexibilidade 6. Separação das partes volúmicas e desviatóricas 7. Estados planos 8. Carga de temperatura 8.1 Carga de temperatura em estados planos 9. Materiais ortotrópicos 10. Outras designações para comportamento dos MC mais geral 10.1 Cedência 10.2 Modelos para o cálculo 1. Justificação da existência das relações constitutivas Resumo dos Capítulos 3-4: O MC exibe devido às solicitações: , , u Incógnitas do problema: 6+6+3=15 componentes 6 Equações deformações - deslocamento 3 Equações de equilíbrio T u + f 0 Faltam 6 equações Não há dependência da resposta do MC do tipo do material A ligação que falta são as equações que relacionam e Chamam-se Equações constitutivas (6): é preciso estabelecer parâmetros que caracterizam o comportamento do MC 2. Linearidade física Ensaio uniaxial Tracção de uma barra Usa-se tensão nominal, ou seja a força aplicada sobre a área da secção transversal inicial Rotura Cedência E tg Limite de linearidade análise fisicamente linear Extensão na direcção da carga aplicada análise geometricamente linear Estudos que abrangem apenas a parte inicial do gráfico, onde a relação entre a tensão e a deformação é linear Análise linear Pode-se usar o princípio de sobreposição Carregamento 1 , , u 1 1 1 Carregamento 2 , , u 2 2 2 α(Carregamento 1) + β(Carregamento 2) 1 + 2 , 1 + 2 , u 1 + u 2 3. Definição de constantes elásticas 3.1 Módulo de Young declive inicial do gráfico tensão - deformação módulo de elasticidade: E = tgα unidade: Pa, GPa=109Pa Análise fisicamente não-linear: módulos de elasticidade secantes ou tangentes usam-se juntamente com os incrementos de tensão e de deformação E tangente inicial E tangente E secante inicial E secante Thomas Young (1773-1829) 3.2 Lei de Hooke 3.3 Efeito de Poisson b E L h Robert Hooke (1635-1703) F h z L h x L Siméon-Denis Poisson (1781-1840) Δh: variação da altura < 0 ΔL: variação do comprimento > 0 L h x z L h : coeficiente ou número de Poisson (sem unidade) extensão na direcção transversal à força aplicada y z razão negativa x x extensão na direcção da força aplicada 0,1 / 2 0: não há variações transversais, 1/2: material incompressível Assume-se a distribuição uniforme 3.4 Módulo de corte (distorção) Ensaio de distorção L b h y F xy u h x xy G xy u h F xy Lb (GPa) G tg 3.5 Módulo de volume Módulo de “bulk” K (GPa) E, , G, K: constantes elásticas do material 1 V 3 m m K 4. Definições ligadas ao comportamento do material Material homogéneo: o comportamento não varia com a posição (aço) Material heterogéneo: betão ?, rochas ?, solos ?, compósitos Material isotrópico: o comportamento não varia com a direcção (aço) Material não-isótrópico e ortotrópico: betão ?, madeira, compósitos 5. Materiais homogéneos isotrópicos em análise linear 5.1 Lei de Hook generalizada C D [C], [D]: Tensores simétricos da 4ª ordem Devido às simetrias podem-se escrever na forma matricial (6,6) D C 1 [C]: matriz de rigidez de material [D]: matriz de flexibilidade de material Comportamento linear implica que as matrizes de rigidez e de flexibilidade são compostas por números (parâmetros de material) sem dependência do estado actual de tensão ou deformação A homogeneidade implica que os parâmetros de material não dependem da posição A isotropia implica que os parâmetros de material não dependem da direcção, ou seja que são indiferentes do referencial A isotropia implica ainda que as direcções principais das tensões e das deformações coincidem, inclusive a ordem 5.2 Composição da matriz de rigidez e de flexibilidade Pode-se provar que duas constantes elásticas são suficientes para descrever o comportamento do material isotrópico E, , G, K: constantes elásticas do material Escolha mais comum em engenharia: E, E G 21 + Condição necessária e suficiente de isotropia E K 31 2 Consequência da lei constitutiva Os princípios energéticos implicam, que os módulos tem que ser positivos 1;1 / 2 0;1 / 2 D1 D 0 0 D C1 C 0 2 2 1 D1 1 1 E 1 0 C 1 E C 1 + 1 2 1 Constantes de Lamé 1 1 , Às vezes as relações constitutivas chamam-se de Lamé E G 1 + 1 2 2 + C1 2 + 2 + Gabriel Lamé, 1795-1870 1 0 0 D2 1 0 1 0 G 0 0 1 1 0 0 C2 G 0 1 0 0 0 1 Outra possível composição do bloco C1 K + 4G / 3 K 2G / 3 K 2G / 3 C1 K 2G / 3 K + 4G / 3 K 2G / 3 K 2G / 3 K 2G / 3 K + 4G / 3 6. Separação das partes volúmicas e desviatóricas Importante para a definição de energia de deformação (cap. 7) parte volúmica das tensões e das deformações: altera-se volume parte desviatórica das tensões e das deformações : altera-se forma em volume inalterado Partes volúmicas m KV 3Km Soma das primeiras 3 equações x + y + z 3Kx + y + z Com as componentes do slide anterior pode se justificar a fórmula do K 1 + + 3K E 1 + 1 2 E K 31 2 Partes desviatóricas 2G Componentes fora de diagonal xy 2Gxy G xy Componentes diagonais x m 2G x m queremos provar x 3Km 2G x m x + y + z x + y + z + 2G x x 3K 3 3 2 x y z x K x + y + z + 2G 3 x K + 4G / 3x + K 2G / 3y + K 2G / 3z relação verídica, prova está finalizada Invariante, dobro da energia de deformação 2 : T m 3m m + : + K 2G Multiplicação “:“ significa “produto interno” entre matrizes Demonstração x m m y m m z m + m 2 yz 0 2 0 xz 2 xy 0 T x m m x m m y m m y m m z m 1 z m 1 m m + + yz 0 2G 2 yz 3K 0 2 0 0 xz xz xy 0 0 2 xy T x m m y m m z m m + yz 0 0 xz xy 0 A prova da relação em cima é óbvia, se os termos “cruzados” davam zero o que também é fácil de mostrar, como As contribuições ao invariante volúmicas e desviatóricas m x + y + z 3m 0 T separam-se directamente nas partes 7. Estados planos Quando nem carga, nem propriedades, nem geometria do MC depende do “z” a descrição do comportamento do MC pode-se simplificar para estados planos Tensão plana z 0, xz 0, yz 0 Exemplos: (1) Placas com espessura fina e carga aplicada no plano da placa (2) Superfícies dos sólidos sem carga aplicada (medição das extensões) x 1/ E / E / E 0 0 0 x D red 1 0 0 0 y y / E 1 / E / E z / E / E 1 / E 0 0 0 0 0 0 1/ G 0 0 0 yz 0 xz 0 0 0 0 1/ G 0 0 red 0 0 0 0 1 / G xy D 2 xy 0 D red Apenas índices x, y e xy xz yz 0 x + y (invariante) z x + y E 1 D D red 1 1 red 1 E 1 1 2 1 Deformação plana z 0, xz 0, yz 0 Exemplos: Sólidos com espessura grossa: barragens C C red 1 red xz yz 0 E x + y x + y z 1 + 1 2 2 1 1 red 1 C1 E 1 1 1 (invariante) Estados planos não correspondem um a outro !!! 8. Carga de temperatura Afecta apenas componentes normais Coeficiente da expansão térmica ºC-1 ou deg-1 Variação de temperatura T Tfin Tini L TL T, T, T Deformação térmica T, T, T,0,0,0 Extensão térmica T 1,T T T Apenas componentes normais D + 1 1 1,T 1 1 x y z 1 x y z 1,T Tx T T y T T T z D1 1 1 1,T 1 C1 1 1,T E1 + + 1,T E 1 1 1 C1 1 + 1 2 C1 1 2 1,T 8.1 Carga de temperatura em estados planos Tensão plana 1 x y 1 red 1 x y red 1 1 1 1 D red 1 Redução de 3D 1 1 E 1 T E red 1 + D 1 2 1 T D 1 T + T D 1 D red 1 1 E 1 1 2 1 E T 1 T 1 1 z x + y + T E E E E E x + y T + x + y T + T 2 2 E 1 1 1 1 1+ x + y + T 1 1 1 1 red 1 E T + 1 2 T C 1 red 1 E T 1 2 T C Deformação plana 1 1 1 1 E 1 C red 1 Redução de 3D 2 1 1 E 1 2 T + 1 1 2 E 1 T C red 1 1 1 1 T C + 1 + T 1 2 E E E x + y z T x y 1 + 1 2 1 + 1 2 E 1 2 1 red 1 1 1 1 2 E + 1 + T + x + y + 1 + T T E 1 1 2 x + y ET 9. Materiais ortotrópicos Existem 3 direcções principais de ortotropia para as equações constitutivas é preciso 9 parâmetros as componentes de matrizes [D] e [C] mudam com a rotação do referencial os blocos de zeros terão em geral termos diferentes de zero Alinhando o referencial com as direcções de ortotropia 1 Ex xy D1 Ex xz E x yx Ey 1 Ey yz Ey zx Ez zy Ez 1 E z 1 G yz D 2 0 0 0 1 G xz 0 0 0 1 G xy De simetria xy y x Ex Ey jj ij i j ii Carga na direcção i -matriz de rigidez pela inversão -ambas sempre positivamente definidas direcções de ortotropia = dir. principais de tensão = dir. principais de deformação 10. Outras designações para comportamento dos MC mais geral Designações do comportamento têm que assumir a carga e a descarga Comportamento Elástico: linear ou não linear: não existem deformações permanentes, depois da descarga o MC encontra-se sem deformações Os estados das tensões e das deformações não dependem da história da aplicação das cargas C. Elasto-plástico: existem deformações plásticas, irreversíveis, ou seja permanentes Et E tangente inicial descarga linear p e parte elástica parte plástica, permanente Lei reversível com histerésis, c. elástico com atrito interno Constantes do material dependem da historia de cargas e descargas transição entre o comportamento reversível e irreversível incompressibilidade após Y enfraquecimento, amaciamento, endurecimento plasticidade amolecimento Mais rígido após a cedência perfeita Menos rígido após a cedência 10.1 Cedência Y Y Y Comportamento viscoso: há dependência no tempo : relaxação, fluência 10.2 Modelos para o cálculo Y Y ,1 Y , 0 Y C. rígido perfeitamente plástico C. elasto-perfeitamente plástico C. elasto-plástico com endurecimento
Baixar