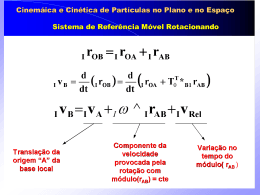
MODELAGEM DINÂMICA DE SISTEMAS MECÂNICOS OBJETIVOS • • • • • Quantificar e visualizar movimentos e trajetórias descritas por peças de um mecanismo; Propiciar o dimensionamento de peças submetidas a cargas dinâmicas; Otimizar o projeto da peça; Reduzir a necessidade de confeccionar protótipos; Produzir ganhos significativos de tempo, com consequente redução de custos. MODELAGEM DINÂMICA DE SISTEMAS MECÂNICOS Modelagens desenvolvidas na FEAGRI • Roçadora com faca articulada; • Garfos flutuantes pantográficos de rastelamento de cana; • Molinete com dedos retráteis de colhedora de grãos; • Garfos alimentadores de enfardadora; • Cortador de base de cana, com dois graus de liberdade. Molinete com dedos retráteis de colhedora de grãos Cortador de base de cana, com dois graus de liberdade. Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Inercial e vetor posição de um ponto “ A “ Z Zo A k O trajetória rOA r I OA Yo j x o Vetor posição que y o acompanha a trajetória z descrita pela partícula A. o Y i r I OA Xo X x0i y 0 j z 0k Cinemáica e Cinética de Partículas no Plano e no Espaço Vetor velocidade absoluta O vetor velocidade absoluta da partícula A, corresponde à derivada primeira no tempo do vetor posição IrOA, no sistema de referência inercial. d dt ( x o ) x o d d v r ( y ) I A I OA o y o dt dt z d (z ) o o dt I Vetor velocidade absoluta que descreve a velocidade da partícula A que percorre a trajetória v A x 0i y 0 j z 0k Cinemáica e Cinética de Partículas no Plano e no Espaço Vetor aceleração absoluta O vetor aceleração absoluta da partícula A, corresponde à derivada segunda no tempo do vetor posição IrOA, no sistema de referência inercial. d2 2 ( x o ) dt x o Vetor aceleração absoluta 2 2 d d d da partícula “A “que a r v ( y ) 2 o y o descreve ma certa I A I A 2 I OA dt dt dt2 z trajetória d (z ) o dt 2 o I aA x0i y0 j z0k Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Todo e qualquer movimento pode ser descrito como uma composição destes dois tipos de movimentos: translação e rotação. Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Transladando Z1 ZB Z ZA i , j , k i1 , j1 , k1 B k1 trajetória rAB YB A j1 k O i rOA XB Y1 i1 YA j Y X1 B1 XA i 1 1 0 0 i j 1 0 1 0 j k 0 0 1 k 1 S I *I S 1 X I S I *B1 S Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Transladando Z1 ZB Z ZA B k1 i , j , k i1 , j1 , k1 trajetória rAB YB A j1 k O i XA X rOA XB Y1 i1 B1 YA j 1 Y X1 S I *I S I S I *B1 S r I rOA I*B1 rAB I OB r I AB I*B1 rAB Cinemáica e Cinética de Partículas no Plano e no Espaço Vetor velocidade absoluta O vetor velocidade absoluta da partícula B, corresponde à derivada primeira no tempo do vetor posição IrOB, no sistema de referência inercial. Vetor velocidade absoluta que d d a velocidade da trajetória I rOB I rOA I*B1 rAB descreve I vB descrita pela partícula B, na base dt dt inercial. d I vB dt d d I rOA I *B1 rAB I * dt dt B1 rAB =0 I vB I v A I*B1 vRel I v A I vRe l Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Rotacionando Z1 ZB Z ZA B k1 trajetória rAB Y1 YB A k rOA j1 i1 XB X1 O i XA X YA j i , j , k i1 , j1 , k1 Y f (t ) 0 I 0 (t ) 0 I 0 (t ) ANÁLISE DINÂMICA DE CORTADOR DE BASE DE CANA, COM DOIS GRAUS DE LIBERDADE Etapa Inicial Dedução das Matrizes de Transformação de Coordenadas e de suas transpostas Definição Matrizes de Transformação de Coordenadas Tn (n : base), são matrizes dependentes do tempo, responsáveis por transformar a representação de um vetor descrito na base de referência BI, para uma base local Bn (B1, ... Bn) (frequentemente móvel). A transposta T’n , por sua vez, transforma um vetor descrito na base local Bn (B1, ... Bn), para a base de referência, podendo esta ser outra base local ou a base inercial. ANÁLISE DINÂMICA DE CORTADOR DE BASE DE CANA, COM DOIS GRAUS DE LIBERDADE Etapa Inicial Dedução das Matrizes de Transformação de Coordenadas e de suas transpostas Propriedades Existem duas importantes propriedades que as matrizes de transformação de coordenadas guardam: seu determinante é sempre unitário e sua inversa é igual a sua transposta. Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Rotacionando Z Z1 k1 Y1 A k cos se n 0 i T se n cos 0 j 0 0 1 k j1 i1 X1 O i j Y1 Y Y B1 X1 X X S T *I S I S T *B1 S T Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Rotacionando Z1 ZB Z ZA B k1 rAB Y1 YB A k i , j i1 , j1 rOA T r r T I OB I OA *B1 rAB j1 i1 (t ) XB X1 O i YA j r I AB Y r I rOA I rAB I OB IrOB XA X IrOA IrAB Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Rotacionando d d T I rOA (T * I vB dt dt r ) B1 AB d d T d T I rOA T *B1 rAB T * B1 rAB I vB dt dt dt d T T ( T ) I ^ T dt T T v v ^ T * r T I B I A I B1 AB *B1 rRel r I AB I v Re l Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Rotacionando r I rOA I rAB I OB d d I rOB I vB dt dt I r I T T OA *B1 rAB vB I vA I ^ I rAB I vRel Translação da origem “A” da base local Componente da velocidade provocada pela rotação com módulo(rAB) = cte Variação no tempo do módulo( rAB ) Cinemáica e Cinética de Partículas no Plano e no Espaço Sistema de Referência Móvel Rotacionando Z A velocidade do ponto “B” pode ser provocada por: B rAB a) Movimentação do ponto “A” , origem da base local A k O b) Giro da base local rOA c) Variação do módulo( rAB ) j Y i a) I X b) c) vB I vA I ^ I rAB I vRel Componente da velocidade linear absoluta provocada pelo giro da peça (base) Componente da velocidade linear absoluta provocada pelo giro da peça (base) I vB I vA I ^ I rAB I vRel Componente da velocidade linear absoluta provocada pelo movimento relativo entre o ponto de interesse e a peça (base) I vB I vA I ^ I rAB I vRel Velocidade linear absoluta do ponto B com suas três componentes Problema: Considerando que o disco da figura gira com velocidade de rotação de 1000 rpm e que a faca gira sobre a articulação “b” com velocidade angular de 200 s-1, calcular a velocidade linear absoluta do ponto “c” quando o conjunto ceifador se desloca à direita com velocidade de translação de 2 m s-1. ab = 600 mm ; bc = 150 mm. Tarefa: Considerando que o disco da figura gira com velocidade de rotação de 1000 rpm, o braço intermediário gira em torno da articulação A com velocidade angular de - 100 s-1 e que a faca gira sobre a articulação “B” com velocidade angular de 200 s-1, calcular a velocidade linear absoluta do ponto “c” para um mecanismo com as seguintes dimensões. OA = 400 mm ; AB = 300 mm. BC = 200 mm Cinemáica e Cinética de Partículas no Plano e no Espaço Vetor aceleração absoluta O vetor aceleração absoluta da partícula B, corresponde à derivada segunda no tempo do vetor posição IrOB, no sistema de referência inercial. 2 2 d d r 2 I aB 2 I OB dt dt I r I OA I*B1 rAB Vetor aceleração absoluta que descreve a aceleração da trajetória descrita pela partícula B, no sistema inercial. aB I aA I*B1 aRel I aA I aRel
Baixar