Álgebra matricial
Álgebra de matrizes é amplamente utilizada na estatística..
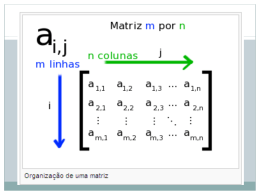
Matrizes
Matriz: um conjunto de elementos arranjados em linhas e colunas. Exemplo:
Linha 1 16 23
Linha 2 33 47
Linha 3 21 35
(Dimensão: 3 x 2)
a11
A = a 21
(3 x 2) a
31
a12
a22
a32
i=1,2,3 (linhas)
j=1,2 (colunas)
Representada por letras em negrito, p.e., A, B, C, , , , , etc.
1
Matriz quadrada:
4 7
3 9
Vetor:
a11
a
21
a31
a13
a23
a33
a12
a22
a32
Número de linhas =
número de colunas.
Contém apenas uma coluna. Também são representados por letras
minúsculas em negrito.
4
Vetor linha ou transposto: B' 15 25 50
A 7
10
Matriz transposta (A’):
A( 3 x 2 )
2 5
7 10
3 4
'
A ( 2 x 3)
2 7 3
5
10
4
Igualdade de matrizes: mesma dimensão e todos os correspondentes
elementos são iguais.
A=B implica:
a1 4
a1
A a2
(3 x 2)
a3
a2 7
4
B 7
( 3 x1)
3
a3 3
2
Adição e subtração de matrizes:
1 4
A 2 5
(3 x 2)
3 6
11
A B 2 2
(3 x 2 )
3 3
11
A B 2 2
(3 x 2 )
3 3
1 2
B 2 3
(3 x 2)
3 4
4 2 2
5 3 4
6 4 6
4 2 0
5 3 0
6 4 0
Matrizes de mesma
dimensão
6
8
10
2
2
2
3
Multiplicação de matrizes:
Por escalar:
2 7 8 28
4A 4
9 3 36 12
4
Multiplicação de matriz por matriz:
2 5 4 6 (2.4 5.5) (2.6 5.8) 33 52
AB
4
1
5
8
(
4
.
4
1
.
5
)
(
4
.
6
1
.
8
)
21
32
2 2
2 2
2
2
Nota: geralmente ABBA.
Exercício: faça a multiplicação das matrizes:
1
AB
0
3
5
3
4
5 .
8
2
5
Tipos especiais de matrizes
Matriz simétrica: se A=A’ ela é dita simétrica. Exemplo:
1 4 6
4 2 5
A
3
3
6 5 3
1 4 6
A ' 4 2 5
6 5 3
6
Matriz diagonal: é uma matriz quadrada, cujos elementos fora da diagonal são
todos iguais a zero, por exemplo,
a1
A 0
0
0
a2
0
0
0
a3
Dois tipos importantes de matrizes diagonal são: matriz identidade e matriz escalar.
Matriz identidade (I): é uma matriz diagonal cujos elementos da diagonal são
todos iguais a um (1).
Pré multiplicando (ou pós multiplicando) qualquer matriz A (r x r), pela
identidade, a matriz A fica inalterada.
1 0 0 a11
IA 0 1 0 a21
0 0 1 a31
a12
a22
a32
a13 a11
a23 a21
a33 a31
a12
a22
a32
a13
a23
a33
Para uma matriz A de dimensão (r x r), temos:
AI IA A
7
Matriz escalar: é uma matriz diagonal cujos elementos da diagonal são todos
iguais. Pode ser dada por I:
0 0
1 0 0
0 0 0 1 0 I
0 0
0 0 1
Vetores e matrizes com todos os elementos iguais a um (1)
1
1
.
r 11
.
.
1
1
1
r J r .
.
1
1 . . 1
1 . . 1
. . . .
. . . .
1 . . 1
8
1
.
1'1 1 . . 1 n n
.
1
Operações importantes:
1
1
.
1
11' 1 . . 1
.
.
1
1
.
.
.
.
.
.
.
.
1
1
n jn
.
1
9
Dependência linear e posto de uma matriz
Dependência linear
Considere a matriz:
1 2 5 1
A 2 2 10 6
3 4 15 1
Observe que a terceira coluna é um múltiplo da primeira coluna:
5
1
10 52
15
3
10
Portanto, as colunas da matriz A, são linearmente dependentes.
Elas contém informações redundantes (supérfluas), pois uma
coluna pode ser obtida como uma combinação linear das
outras.
Considere c vetores colunas de uma matriz (r x c) : C1,
C2,...,Cc.De modo geral, define-se dependência linear como:
• quando c escalares 1,..., c, nem todos iguais a zero, podem
ser determinados tal que:
1C1 2C2 ... cCc 0
Os c vetores colunas são
linearmente dependentes
11
Se o único conjunto de escalares, para o qual a igualdade vale (=0) é:
1 0, 2 0,...,c 0
Os c vetores colunas são
linearmente independentes
Exemplo: considere os escalares:1=5, 2=0, 3=-1e 4=0, assim temos:
1 2 5 1 0
52 0 2 110 0 6 0
3 4 15 1 0
Portanto, as colunas são linearmente dependentes. Observe que alguns ’s são
iguais a zero.
Posto (rank) de uma matriz
O posto de uma matriz é definida como sendo o número máximo de colunas (linhas)
linearmente independentes. No exemplo acima, encontramos 3 colunas (1,2 e 4)
linearmente independentes. Não existem escalares 1, 2 e 4 tal que 1C1+ 2C2+
4C4=0 a não ser estes: 1=0, 2=0 e 4=0. Assim, o posto de A é 3.
12
Segue-se que o posto de uma matriz (r x c) não pode exceder o min(r,c), isto é, o
mínimo entre r e c. No caso de uma matriz, por exemplo, C, que é o resultado do
produto de duas outras matrizes (A e B), o rank de C não pode exceder o mínimo
entre o rank(A) e o rank(B).
(Definição: o rank, posto ou característica de uma matriz, é o número de linhas
não nulas na sua forma escalonada canônica).
Exercício: seja a matriz
4 2 2
A 2 2 0
2 0 2
encontre o valor do rank de (A).
OBS. Matriz de rank incompleto
13
Inversa de uma matriz
Na álgebra de matrizes, a inversa de uma matriz A (quadrada), é
uma outra matriz, denominada por A-1, tal que:
1
A A AA
1
I
Muitas matrizes quadradas não tem inversa. Para aquelas que
têm, a inversa é única.
14
Encontrando a inversa.
A inversa de uma matriz quadrada (r x r) existe se o rank da matriz é r. Esta matriz
é denominada de não singular ou de posto completo.Uma matriz (r x r) com rank
menor do que r é denominada de matriz singular ou de posto incompleto e não tem
inversa. A inversa de uma matriz (r x r) de rank completo também tem rank r.
Usaremos programas estatísticos ou matemáticos para encontrar inversas de
matrizes. Por exemplo, para a matriz:
2 4
A
3 1
a inversa, obtida no PROC IML do SAS, é dada por:
Comandos SAS
A
INVERSA
2 rows
2
3
2 cols
4
1
2 rows
-0.1
0.3
2 cols
0.4
-0.2
proc iml;
reset print;
A={2 4,
3 1};
INVERSA=inv(A);
15
Uso da matriz inversa
Se temos uma equação:
AY C
Assumindo que A tem inversa, podemos pré-multiplicar ambos os lados da igualdade
por A-1:
A 1AY A 1C
Como A-1AY=IY=Y, obtemos a solução:
Y A 1C
Exemplo: suponha o seguinte sistema de equações:
2 y1 4 y2 20
3 y1 y2 10
Escrevendo na forma matricial temos:
16
2 4 y1 20
3 1 y 10
2
A solução do sistema de equações é dada por:
1
y1 2 4 20 y1 0.1 0.4 20 2
y 3 1 10 y 0.3 0.2 10 4
2
2
17
Determinantes
Não daremos a definição geral de determinantes, por ser bastante complicado,
mas veremos como se calculam os determinantes nos casos mais simples.
Só há determinante de matriz quadrada e representa-se por:
A
Exemplo:
7 5
C
7x6 5x 4 22
4 6
18
No caso de uma matriz 3 x 3, o determinante é calculado pela regra de Sarrus
a11
a12
a13
a21
a22
a23 a11a22 a33 a12 a23 a31 a13 a21a32
a31
a32
a33
- a13 a22 a31 a11a23 a32 a12 a21a33
Exemplo:
1 2 3
4 3 2 1.3.3 2.2.2 3.4.4 2.3.3 1.4.2 2.4.3 15
2 4 3
Para matrizes de maiores dimensões as regras, que não veremos, são mais
complicadas.
19
Determinante de uma matriz singular
Toda matriz quadrada singular tem determinante nulo; reciprocamente, é singular
toda matriz de determinante nulo. Assim a matriz:
1 1
A
A 1.2 1.2 0
2 2
É singular,isto é, não tem inversa.
20
Raízes próprias (auto valores ou ‘eigenvalues’)
Seja a matriz
2 3
A
3
10
Consideremos a matriz:
3
2 3
1 0 2
A I
3
10
0
1
3
10
Tomemos agora a equação:
A I 0
Isto é:
2
3
0
3
10
21
As raízes dessa equação são, por definição, as raízes próprias (ou ‘eigenvalues’) da
matriz A.
No exemplo, o determinante nos dá:
2 10 9 0
12 11 0
2
Esta equação nos dá as raízes:
1 11
2 1
22
Auto vetores ou ‘eigenvectors’)
Definição: Dada A(n) real e simétrica, então todo vetor x tal que:
A I x
é auto-vetor, vetor próprio (‘eigenvector’) de A.
Fato: auto vetores associados a auto vetores diferentes de uma A(n) real e
simétrica são ortogonais.
Exemplo:
Seja a matriz
2 3
A
3
10
Para 1=11, temos:
23
A I X
3 X 1 0
2 1
3 10 11 X 0
2
9 3 X 1 0
3 1 X 0
2
9 X 1 3 X 2 0
3X1 X 2 0
Um auto vetor é:
2
x
6
24
Para 2=1, seguindo as mesmas etapas, obtemos o segundo auto vetor:
3
x
1
Norma Euclidiana
Definição: define-se norma Euclidiana de um vetor u ao número real não
negativo
1
2
1
u u' u
1/ 2
u
u
2
.
u1 ,u 2 ,...,u n
.
.
u
n
2
ui
i 1
n
1
2
25
Exemplo: vamos considerar o primeiro auto vetor encontrado anteriormente:
1)
2
x
6
Para o vetor 1), a norma euclidiana vale:
x xx
'
1/ 2
2
2
6
6
1
2
2 6
2
2
40
1
2
1
2
6,32
Vetor normalizado
Definição: dizemos que um vetor u* está normalizado se:
1
u
u
u
*
26
Exemplo: vamos considerar o primeiro auto vetor encontrado anteriormente:
1
1 2 0,3165
x
x
x
6,32 6 0,9494
*
Observe que:
0,3165
x x 0,3165 0,9494
1
0,9494
*'
*
27
Sistemas de equações lineares
Sistemas de equações de primeiro grau, com qualquer número de incógnitas.
Por exemplo:
3 X 1 2 X 2 8
8 X 1 X 2 15
X1 2 X 2 X 3 0
0 X1 X 2 3X 3 4
X 0 X 2 X 1
2
3
1
28
Em termos matriciais, podemos escrever:
3 2 X 1 8
8 1 X 15
2
1 2 1 X 1 0
0 1
3
X
4
2
1 0 2 X 3 1
Matrizes do sistema
29
Consideremos o sistema:
3 2 X 1 8
8 1 X 15
2
A
X
B
Se A é não singular, isto é, que tenha inversa, A-1, então a solução do sistema é
dado por:
X A1 B
Logo:
30
X 1 1 1 2 8 1 38 2
X
X 2 19 8 3 15 19 19 1
Assim:
X1 2
X2 1
É fácil compreender, portanto, que quando a matriz A é não singular, o sistema
tem solução e essa solução é única. Mas para o estudo dos componentes principais
interessam-nos sistemas de equações:
AX
Em que a matriz A seja singular e o segundo termo seja uma matriz nula.
31
Exemplo:
X1 X 2 2 X 3 0
X1 X 2 X 3 0
3 X X 5 X 0
2
3
1
1 1 2 X 1 0
1 1 1 X 0
2
3 1 5 X 3 0
32
Equações lineares em que o segundo membro é nulo, se dizem homogêneas.
Todo sistema de equações lineares homogêneas:
AX
tem solução, isto é, é compatível. Se a matriz A for não singular, a única
solução possível é a solução nula:
X 1 X 2 ... 0
X
Esta solução geralmente não interessa. Mas se a matriz A for singular, o
sistema de equações será indeterminado, isto é, terá infinitas soluções. Tal é o
caso do sistema do nosso exemplo, pois a matriz
1 1 2
1 1 1
3 1 5
É singular
33
Para obter uma solução não nula, começamos por abandonar uma das
equações e dar a uma das incógnitas um valor arbitrário não nulo. Por
exemplo, abandonar a terceira equação e fazemos X3=1. Fica:
X1 X 2 2 0
X1 X 2 1 0
X 1 X 2 2
X 1 X 2 1
Resolvendo este sistema, uma solução é:
3
X1
2
1
X2
2
X3 1
34
Matrizes de covariâncias e vetores de médias
Amostras multivariadas podem ser resumidas por meio de vetores e matrizes de
covariâncias. São definidas como segue. Suponha que temos p variáveis X1,X2,...,Xp e
os valores dessas variáveis para a i-ésima observação, caso, em uma amostra são
x1,x2,...,xp, respectivamente. Então a média amostral da variável j é:
n
x j xij / n
i 1
s 2j xij x j
A variância amostral é:
n
2
n 1
i 1
A covariância entre as variáveis j e k é definida como:
c jk xij x j xik xk n 1
n
i 1
A covariância é uma medida do relacionamento linear entre duas variáveis.
35
O coeficiente de correlação para as variáveis j e k, rjk, está
relacionado com a covariância pela expressão:
rjk
c jk
s s
j k
Vetor de médias amostrais
x1
x
2
...
x p
36
Matriz de variância-covariância amostral
c11 c12
c
21 c22
.
C .
.
.
c p1 c p 2
Onde,
. . c1 p
. . c2 p
. . .
. . .
. . c pp
cii s
2
i
Esta matriz quantifica a variabilidade presente nas variáveis, como também a
correlação entre as mesmas.
37
Matriz de correlação amostral
1 r12
r
1
21
R
... ...
rp1 rp 2
... r1 p
... r2 p
... ...
... 1
Quando as variáveis X1,X2,...,Xp têm a mesma unidade e grandezas não muito
diferentes, pode-se usar a matriz de variâncias-covariâncias. Caso contrário, é
recomendado usar variáveis padronizadas, isto é, cada uma dividida pelo desvio
padrão. Mas isto é equivalente a usar a matriz de correlação.
38
Alguns teoremas básicos
Em muitas situações temos um vetor aleatório W, o qual é obtido prémultiplicando-se o vetor aleatório Y por uma matriz A (com valores
fixos): W=AY. Temos os seguintes teoremas:
E( A) A
E( W) E ( AY) AE(Y)
σ 2 ( W) 2 ( AY) A 2 (Y) A '
Exercício: considere,
W1 1 1 Y1
W 1 1 Y
2
2
W
A
Y
Mostre as expressões para E(W) e 2(W).
39
Baixar