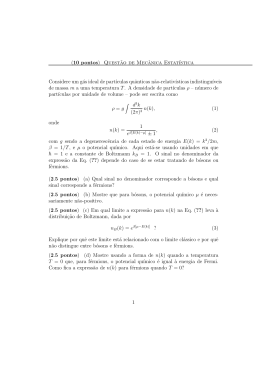
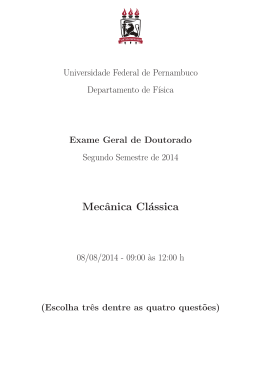
UMA ABORDAGEM BASEADA EM FILTROS DE PARTÍCULAS PARA PROGNÓSTICO DE FALHAS Luciana B. Cosme∗, Marcos Flávio S. V. D’Angelo†, Walmir M. Caminhas‡, Murilo Cesar O. Camargos Filho†, Alexandre R. Mesquita‡, Reinaldo M. Palhares‡ ∗ IFNMG Campus Montes Claros Rua Dois, 300, Village do Lago I, 39404-058, Montes Claros - MG Programa de Pós-Graduação em Engenharia Elétrica - Universidade Federal de Minas Gerais - Av. Antônio Carlos 6627, 31270-901, Belo Horizonte, MG, Brasil † Departamento de Ciência da Computação Universidade Estadual de Montes Claros Av. Rui Braga, s/n, Vila Mauricéia, CEP: 39401-089 Montes Claros - MG ‡ Departamento de Engenharia Eletrônica Universidade Federal de Minas Gerais Av. Antônio Carlos, 6627, 31270-901, Belo Horizonte - MG Emails: [email protected], [email protected], [email protected], [email protected], [email protected], [email protected] Abstract— This paper addresses the problem of predicting faults and the tool wear condition of a computer numerical control. To handle this problem, an approach based on a particle filter is used and compared with traditional approaches for prediction. The contribution of the paper is to assess a particle filter robustness with respect to noise and uncertainty in system and measurement models. The particle filter solution had superior performance compared to traditional methods such as artificial neural networks and neuro-fuzzy systems when the the validation dataset was used. The simulation results indicate the usefulness of the method and that it may be easily converted into a real time application of fault prognosis. Keywords— Fault Prognostic, Particle Filters, Bayesian Inference Resumo— Este artigo trata o problema de predição de falhas e de desgaste em máquinas CNC. Uma abordagem baseada em filtro de partı́culas é usada e comparada com abordagens clássicas de predição. A contribuição do trabalho é avaliar a robustez do filtro de partı́culas no que diz respeito ao ruı́do e à incerteza em modelos de sistemas e de medição em máquinas CNC. A solução encontrada usando o filtro de partı́culas mostrou-se superior aos métodos tradicionais, como as redes neurais artificiais e os sistemas neuro-fuzzy, no conjunto de dados utilizado na etapa de validação. Os resultados desse estudo indicam a utilidade do método e que este pode ser facilmente convertido em uma aplicação em tempo real para prognóstico falha. Palavras-chave— 1 Prognóstico de Falhas, Filtro de Partı́culas, Inferência Bayesiana Introdução Os conceitos de diagnóstico e prognóstico podem ser aplicados na engenharia para prever o estado de um sistema industrial, ou mesmo um componente, utilizando dados históricos de parâmetros mensuráveis. Como resultado da crescente quantidade de máquinas interligadas no processo de controle, as indústrias são forçadas a procurar novas maneiras de lidar com os riscos de uma falha inesperada. As metodologias utilizadas no prognóstico já não podem depender apenas de operadores humanos, pois suas decisões em relação a sistemas complexos não são suficientemente confiáveis (Venkatasubramanian et al., 2003). Portanto, é necessário que se busquem novas abordagens para a realização do prognóstico que consigam lidar com a grande quantidade de variáveis presentes nestes sistemas. Os modelos de prognóstico são divididos em três categorias principais: baseado em modelos fı́sicos, baseado em dados e modelos hı́bridos (An et al., 2013). As abordagens baseadas na fı́sica do processo utilizam modelos analı́ticos que descrevem o comportamento de um sistema; esses modelos, geralmente, são altamente especı́ficos (Sikorska et al., 2011). Alguns exemplos bem conhecidos foram discutidos em (Ray and Tangirala, 1996), (Li and Lee, 2005), (Oppenheimer and Loparo, 2002), (Kacprzynski et al., 2004), (Yin et al., 2008). As abordagens baseadas em dados encontram o modelo de sistema(s) através de um histórico de dados previamente coletados (Sun et al., 2012). Esta metodologia costuma utilizar métodos estatı́sticos e/ou ferramentas de inteligência computacional. A análise de séries temporais, por exemplo, em dados de degradação foi utilizada em (Wang et al., 2012) para previsão de falhas em uma máquina elétrica. Em (Boškoski et al., 2015), (Yan et al., 2004) são discutidas as utilizações de modelos de processos Gaussianos e modelos auto-regressivos na determinação da vida útil remanescente (Remaining Useful Life RUL). Já os filtros de partı́culas, objeto de estudo do presente trabalho, são utilizados em (Vasan et al., 2013) onde é apresentada a classificação de falhas no instante atual em circuitos analógicos e, posteriormente, adota o filtro para predizer a RUL p passos a frente. De forma semelhante, (Liao, 2014) também emprega o filtro para prever a RUL em rolamentos após identificar o estágio atual da falha com Programação Genética. Também em conjunto com os métodos de inteligência computacional, os filtros de partı́culas foram usados recentemente em (Pang et al., 2015) e em (Pang et al., 2013) onde os autores representam o espaço de estados como um modelo ARMA e como uma rede neural recorrente, respectivamente. Um tutorial com aplicação do filtro de partı́culas para prognóstico é proposto em (An et al., 2013) para estimar os parâmetros de um modelo de degradação da vida útil de baterias. Neste artigo, uma abordagem baseada em filtro de partı́culas é testada em dados extraı́dos de uma máquina de comando numérico (Computer Numerical Control - CNC )(PHM Society Conference Data Challenge, 2010). Um modelo empı́rico da progressão do nı́vel de desgaste é aplicado na predição do estado de vida útil do equipamento. Porém, de forma diferente de (An et al., 2013), a medição do nı́vel de desgaste não é obtida diretamente e os resultados foram comparados com métodos clássicos da literatura. O restante do artigo está organizado da seguinte maneira: a Seção 2 trata dos filtros de partı́culas, na Seção 3 apresenta-se a base de dados utilizada, na Seção 4 é proposta a metodologia, os resultados e as discussões e finalmente na Seção 5 as conclusões do artigo. 2 Filtro de Partı́culas Na literatura existem diversos tipos de filtros recursivos para lidar com a inferência/extração de alguma informação não conhecida a partir de observações. Em especial, os filtros de partı́culas, como mencionado em (Doucet and Johansen, 2009), se tornaram uma classe popular e importante para resolver problemas dessa natureza. Os Filtros de Partı́culas (FP) usam simulação de Monte Carlo para gerar trajetórias em um espaço de estados e então incorporar a informação da medição utilizando inferência Bayesiana. São métodos normalmente indicados para problemas não-lineares e não-Gaussianos (Arulampalam et al., 2002). Muitas variações de filtros de partı́culas estão disponı́veis. Porém, para o presente trabalho, foi utilizado o filtro do tipo bootstrap, que consiste em sua versão mais simples (Chen, 2003). A Equação 1 modela a evolução da sequência de estados, (xk , k ∈ N), dada por: xk = fk (xk-1 , Wk-1 ) , k ≥ 1 (1) onde xk representa o vetor de estados, fk é uma função não-linear do estado xk-1 , Wk-1 , k ∈ N, é uma sequência i.i.d do ruı́do de processo. O objetivo é estimar recursivamente o estado xk a partir das medições yk . O modelo de medição pode ser descrito como: yk = hk (xk , vk ) , (2) onde hk é um função possivelmente não-linear que representa a relação entre a medição e os estados e vk , k ∈ N, é uma sequência i.i.d do ruı́do de medição. Além disto, x0 , vk e wk são mutualmente independentes. A Equação 1 caracteriza a probabilidade de transição dos estados, p(xk |xk-1 ), enquanto a Equação 2 descreve a probabilidade p(yk |xk ) que está relacionada ao modelo de medição. Buscamse então estimativas de xk baseadas no conjunto de medições disponı́veis y1:k = yi , i = 1, ..., k até o instante k. A partir da distribuição a priori p(x0 ), a distribuição a posteriori p(xk |y1:k ) é obtida recursivamente em duas etapas: predição e atualização. Dada a probabilidade p(xk-1 |y1:k-1 ) em um instante k, o passo de predição aplica a equação de Chapman-Kolmogorov ao modelo de estado para obter a probabilidade a priori no instante k: Z p(xk |y1:k-1 ) = p(xk |xk-1 )p(xk-1 |y1:k-1 )dxk-1 . (3) O passo de atualização é alcançado pela aplicação do teorema de Bayes: p(xk |y1:k ) = p(yk |xk )p(xk |y1:k-1 ) , p(yk |y1:k-1 ) (4) onde p(xk |y1:k−1 ) define a probabilidade a priori, p(yk |xk ) é a verosimilhança dada pelo modelo de medição (Equação 2) e o denominador refere-se a constante de normalização que representa a evidência. Essa abordagem define a solução Bayesiana. No entanto, nem sempre é possı́vel determiná-la analiticamente, exceto quando o sistema é linear e as distribuições são Gaussianas, como é o caso do filtro de Kalman. Por outro lado, os filtros de partı́culas não requerem qualquer hipótese sobre a forma da função de densidade de probabilidade (pdf ) do vetor de estados. Para ilustar os detalhes do algoritmo, sumaNp rizado na Tabela 1, considere que {xi0:k , Wki }i=1 representam valores que caracterizam a função de densidade de probabilidade (pdf ) p(x0:k |y1:k ), Existem várias técnicas de reamostragem, como apresentado em (Chen, 2003), cujo objetivo é gerar um novo conjunto de amostras substituindo as partı́culas com pesos triviais e duplicar amostras com pesos maiores. Para o presente trabalho utilizou-se a técnica de reamostragem sistemática, cujo objetivo é minimizar a variância das partı́culas replicadas. Essa abordagem também possui menor esforço computacional O(Np ) (Chen, 2003). Tabela 1: Filtro Boostrap (i) (i) Gere partı́culas x0 ∼ p(x0 ), W0 = N1p , i = 1, ..., Np . Para os passos k = 0, 1, 2, ... (i) (i) Gere partı́culas xk ∼ p(xk |xk−1 ), i = 1, ..., Np , de acordo com a Eq. 1. (i) Calcule os pesos Wki = Wk−1 p(yk |xik ) de acordo com a Eq. 2. (i) Normalize os pesos Ŵk = (i) Wk PNp (j) . j=1 Wk Calcule uma medida de degeneração, N̂ef f , de acordo com a Eq. 7. Se N̂ef f < NT , onde NT é um limiar. Gere Np novas partı́culas por reamostragem a partir do conjunto atual de partı́culas. (i) Faça Wk = N1p Fim-se. Fim-para. onde Np é o número de partı́culas, xi0:k , i = 0, ..., Np é um conjunto de amostras com pesos associados Wki , i = 1, ..., Np e x0:k = xj , j = 0, ..., k é o conjunto de estados até o instante k. Conforme mostrado na Tabela 1, os pesos são calculados pela Eq. 6(Arulampalam et al., 2002) e normalizados. A densidade a posteriori no instante k pode ser aproximada por: p(x0:k |y1:k ) ≈ Ns X Wki δ(x0:k − xi0:k ) , (5) i=1 onde δ(.) é o delta de Dirac e os pesos Wki podem ser atualizados usando a seguinte relação: i Wki = Wk-1 p(yk |xik ). (6) Um aspecto importante que ocorre com frequência nos filtros de partı́culas é o efeito da degeneração, onde a maioria das particulas possuem pesos insignificantes, devido ao aumento da variância dos pesos ao longo do tempo. A desvantagem reside no grande esforço computacional para atualizar pesos com valores triviais. A técnica de reamostragem pode ser feita para evitar a atualização de partı́culas que contribuem pouco para p(xk |y1:k ). Ela pode ser realizada sempre entre os passos de amostragem ou, conforme mencionado em (Arulampalam et al., 2002) e (Chen, 2003), pode-se utilizar uma medida de degeneração, N̂ef f , para nortear a reamostragem quando o número efetivo de partı́culas se torna menor que um limiar, NT , conforme apresentado na Equação 7. N̂ef f = PNs 1 i 2 i=1 (Wk ) 3 O objetivo principal deste trabalho é a previsão da condição de saúde de uma máquina de comando numérico (CNC). Essas previsões podem ser utilizadas para diminuir os custos de manutenção e aumentar a produtividade da máquina. Para alcançar este objetivo, é necessária a previsão do desgaste da fresa antes que os cortadores atinjam seu limite de desgaste (Tobon-Mejia et al., 2012). A base de dados Prognostic Data Challenge 2010 (PHM Society Conference Data Challenge, 2010) foi disponibilizada pela Sociedade de Prognóstico e Gerenciamento de Saúde (PHM Society) e contêm dados históricos de uma fresadora CNC de alta velocidade com três cortadores (Röders Tech RFM760) utilizados até um estágio de desgaste significante. Os dados foram obtidos através de um cartão de aquisição de dados do dinamômetro, para medir a força dos cortes nas três dimensões X, Y e Z; dos acelerômetros, que mediram a vibração também em três dimensões, e do sensor de emissão acústica para monitorar o estresse de alta frequência gerado pelo processo de corte (Li et al., 2009). O conjunto de dados do desafio contém seis experimentos, nomeados de c1 , c2 , ..., c6 , com 315 cortes individuais cada. No entanto, apenas três experimentos (c1 , c4 e c6 ) contém a medição do nı́vel de desgaste. Para compor esses registros, as três fresas disponı́veis na máquina realizaram os cortes em peças idênticas. Em cada corte, os dados obtidos pelo dinamômetro, acelerômetros e sensor acústico foram gravados. 3.1 onde Wki pode ser calculado pela Equação 6. (7) Extração de caracterı́sticas Os dados dos sensores foram processados para verificar se eles podem representar a informação de desgaste, que não pode ser obtida diretamente em funcionamento normal. Dos dados brutos foram extraı́das caracterı́sticas, da seguinte forma (Tobon-Mejia et al., 2012): , Base de Dados Dinamômetro: valor quadrático médio (Root Mean Square - RMS ), pico (valor máximo) e desvio padrão (std). Cada medida foi extraı́da para cada eixo, totalizando 9 colunas. Acelerômetro: RMS e curtose. Cada medida foi extraı́da para cada eixo, totalizando 6 colunas. Emissão acústica: média e desvio padrão, totalizando 2 colunas. Para as 17 caracterı́sticas extraı́das foi calculado o coeficiente de correlação com relação ao nı́vel de desgaste. Para melhorar a confiabilidade da predição, optou-se por comparar com o valor máximo de desgaste entre as três fresas, visto que o objetivo é interromper a máquina para manutenção preditiva ao se atingir um limiar. A Tabela 2 apresenta o resultado do cálculo do coeficiente. RMS Pico std Média Curtose X 0.79 0.89 0.97 Força Y Z 0.98 0.97 0.95 0.96 0.98 0.97 X 0.96 Vibração Y Z 0.96 0.96 Emissão acústica 0.36 0.59 0.71 0.44 0.84 Tabela 2: Coeficiente de correlação de cada caracterı́stica em relação ao nı́vel de desgaste. Os maiores valores na Tabela 2 significam maior correlação com o nı́vel de desgaste. A Figura 1 mostra a caracterı́stica 10 (RMS da vibração no eixo X) com relação ao nı́vel de desgaste. 0.22 0.2 RMS da vibração no eixo Y 0.18 0.16 0.14 0.12 0.1 0.08 0.06 40 60 80 100 120 Nı́vel de desgaste 140 160 180 Figura 1: Caracterı́stica 10 versus o nı́vel de desgaste Neste artigo foram testadas as caracterı́sticas que apresentaram os maiores valores de correlação com o desgaste. A caracterı́stica 10 (RMS da Vibração no eixo X) obteve os melhores resultados, como será mostrado na seção 4.2. 4 Resultados e Discussão Para avaliar o comportamento do filtro de partı́culas utilizou-se a base de dados apresentada na seção 3. O objetivo do trabalho é então inferir o valor do desgaste, com base apenas no RMS da vibração extraı́do das medições dos sensores, visto que a medida de desgaste não pode ser obtida diretamente. 4.1 Modelo O modelo empı́rico adotado de transição de estados com estimação de estados e de parâmetros é dado por: xk = exp (ck-1 )xk-1 + w1(k) ck = ck-1 + w2(k) , (8) onde xk é o nı́vel de desgaste, ck-1 é parâmetro do modelo a ser encontrado e w(k) representa o ruı́do gaussiano branco do modelo. Assumiu-se que a caracterı́stica possui valor proporcional ao desgaste, conforme Equação 9. log(yk ) = b0 + log(xk )b1 + vk , (9) onde yk é a medição obtida no instante k (RMS da vibração no eixo X), b0 = −7.62385 e b1 = 1.16725, obtidos por regressão linear dos dados, e vk é o ruı́do de medição com variância 0.013. 4.2 Experimentos Esta seção mostra os resultados experimentais obtidos e comparados com um sistema de inferência Fuzzy (Adaptive-Network-Based fuzzy Interface System - ANFIS ) (Jang and Sun, 1997) e uma rede neural artificial (RNA) (Haykin, 1998), modelos amplamentes estabelecidos na literatura e que serão utilizados para comparação com o filtro de partı́culas. Utilizou-se o ambiente Matlab 2013 com suas funções para Redes Neurais, ANFIS e regressão linear (obtenção dos parâmetros da Eq. 9). A arquitetura da rede neural, do tipo feedforward, consistiu em 3 neurônios na camada escondida e treinamento com algoritmo de Levenberg-Marquardt. Para o sistema de inferência Fuzzy do tipo sugeno, adotou-se 3 de funções de pertinência (gbellmf ) e máximo de 100 épocas. Para os resultados apresentados na Tabela 3, foram utilizados dois experimentos c1 (experimento 1) e c4 (experimento 4), no entanto, o último foi fornecido aos métodos apenas como validação e, para este caso, o nı́vel de desgaste foi considerado desconhecido. Como critérios de comparação foram utilizados o erro quadrático médio (RMSE) e erro percentual médio (MAPE). Os resultados correspondem à média de cada critério em 30 execuções. Os parâmetros de ajuste do FP consistem de 50 partı́culas; NT = 0.9; ruı́do de modelo estimado empiricamente, σw1 = 0.1 e σw2 = 0.001; e ruı́do de medição estimado por regressão linear, σv = 0.11. Além disto, foi utilizada a reamostragem sistemática(Chen, 2003). A estimativa da mediana do valor predito se comportou melhor como estimativa do estado xk que a média. Após a simulação para c1 , o parâmetro c = 0.0043 foi encontrado com base nos dados e então utilizado para validação com c4 . 220 Desgaste real Desgaste predito 200 IP 95% 180 160 FP c1 11.25 7.49 c4 11.99 12.79 Tabela 3: Resultados comparativos. Nível de desgaste ANFIS c1 c4 6.33 19.86 3.99 18.07 140 120 100 80 60 A Tabela 3 mostra que o filtro de partı́culas obteve melhores resultados que os modelos RNA e ANFIS para os critérios analisados no experimento c4 . Vale ressaltar que a formulação do modelo de predição levou em consideração somente o experimento c1 , sendo o experimento c4 inteiramente utilizado para validação dos modelos. A Figura 2 mostra o comportamento do modelo RNA para predição do desgaste na validação c4 . A Figura 3 mostra o comportamento do modelo ANFIS para predição do desgaste na validação c4 . A Figura 4 mostra o comportamento do modelo PF para predição do desgaste na validação c4 . Em todas as figuras também há o intervalo de predição com 95% de confiança. Apesar de o resultado do filtro de partı́culas tem-se mostrado pior para a etapa de treinamento, ele ofereceu uma melhor predição do desgaste para o experimento de validação, com menos sensibilidade às oscilações dos dados dos sensores e dentro do intervalo de predição. 40 20 0 0 50 100 150 200 250 300 350 300 350 Número do corte Figura 3: Validação com ANFIS 220 Desgaste real Desgaste predito IP 95% 200 180 160 Nível de desgaste RMSE MAPE RNA c1 c4 6.67 22.49 4.30 18.20 140 120 100 80 60 40 20 0 50 100 150 200 250 Número do corte 220 Desgaste real 200 Desgaste predito IP 95% Figura 4: Validação com Filtro de Partı́culas 180 160 Nível de desgaste 140 equipamento a partir dos dados disponı́veis de sensores. Além disso, a abordagem pode ser aplicada em modo on-line e em tempo real após o ajuste do modelo, como pode ser visto no experimento c4 . 120 100 80 60 40 Agradecimentos 20 0 0 50 100 150 200 250 300 350 Número do corte Os autores agradecem o suporte financeiro da FAPEMIG e CNPq (processo 157280/2014-4). Figura 2: Validação com Redes Neurais Referências 5 Considerações Finais O presente trabalho apresentou o filtro de partı́culas como método capaz de fazer a predição das condições de desgaste de uma máquina CNC. Os resultados comparativos com uma rede neural artificial e um sistema de inferência Fuzzy mostraram a melhor capacidade do filtro de partı́culas em prever um valor desconhecido de desgaste do An, D., Choi, J. H. and Kim, N. H. (2013). Options for prognostics methods: A review of data-driven and physics-based prognostics, 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, American Institute of Aeronautics and Astronautics. Arulampalam, M., Maskell, S., Gordon, N. and Clapp, T. (2002). A tutorial on particle fil- ters for online nonlinear/non-Gaussian Bayesian tracking, IEEE Transactions on Signal Processing 50(2): 174–188. Boškoski, P., Gašperin, M., Petelin, D. and Juričić, D. (2015). Bearing fault prognostics using rényi entropy based features and gaussian process models, Mechanical Systems and Signal Processing 52-53: 327–337. Chen, Z. (2003). Bayesian filtering: From kalman filters to particle filters, and beyond, Technical report, McMaster University. Doucet, A. and Johansen, A. M. (2009). A tutorial on particle filtering and smoothing: fifteen years later, Handbook of Nonlinear Filtering 10: 656–704. Haykin, S. (1998). Neural Networks: A Comprehensive Foundation, 2 edn, Prentice Hall PTR, Upper Saddle River, NJ, USA. Jang, J.-S. R. and Sun, C.-T. (1997). Neuro-fuzzy and Soft Computing: A Computational Approach to Learning and Machine Intelligence, Prentice-Hall, Inc., Upper Saddle River, NJ, USA. Kacprzynski, G. J., Sarlashkar, A., Roemer, M. J., Hess, A. and Hardman, B. (2004). Predicting remaining life by fusing the physics of failure modeling with diagnostics, JOM 56(3): 29– 35. Li, C. J. and Lee, H. (2005). Gear fatigue crack prognosis using embedded model, gear dynamic model and fracture mechanics, Mechanical Systems and Signal Processing 19(4): 836–846. Li, X., Lim, B., Zhou, J., Huang, S., Phua, S., Shaw, K. and Er, M. (2009). Fuzzy neural network modelling for tool wear estimation in dry milling operation, Annual Conference of the Prognostics and Health Management Society, PHM Society. Liao, L. (2014). Discovering prognostic features using genetic programming in remaining useful life prediction., IEEE Transactions on Industrial Electronics 61(5): 2464–2472. Oppenheimer, C. H. and Loparo, K. A. (2002). Physically based diagnosis and prognosis of cracked rotor shafts, in P. K. Willett and T. Kirubarajan (eds), Component and Systems Diagnostics, Prognostics, and Health Management II, SPIE. Pang, C. K., Zhou, J.-H. and Yan, H.-C. (2013). Pdf and breakdown time prediction for unobservable wear using enhanced particle filters in precognitive maintenance, 9th Annual Conference of the IEEE Industrial Electronics Society (IECON 2013) . Pang, C. K., Zhou, J. and Yan, H. (2015). PDF and breakdown time prediction for unobservable wear using enhanced particle filters in precognitive maintenance, IEEE T. Instrumentation and Measurement 64(3): 649–659. PHM Society Conference Data Challenge (2010). https://www.phmsociety.org/ competition/phm/10. Ray, A. and Tangirala, S. (1996). Stochastic modeling of fatigue crack dynamics for on-line failure prognostics, IEEE Transactions on Control Systems Technology 4(4): 443–451. Sikorska, J., Hodkiewicz, M. and Ma, L. (2011). Prognostic modelling options for remaining useful life estimation by industry, Mechanical Systems and Signal Processing 25(5): 1803– 1836. Sun, J., Zuo, H., Wang, W. and Pecht, M. G. (2012). Application of a state space modeling technique to system prognostics based on a health index for condition-based maintenance, Mechanical Systems and Signal Processing 28: 585–596. Tobon-Mejia, D., Medjaher, K. and Zerhouni, N. (2012). CNC machine tool's wear diagnostic and prognostic by using dynamic bayesian networks, Mechanical Systems and Signal Processing 28: 167–182. Vasan, A. S. S., Long, B. and Pecht, M. G. (2013). Diagnostics and prognostics method for analog electronic circuits., IEEE Transactions on Industrial Electronics 60(11): 5277–5291. Venkatasubramanian, V., Rengaswamy, R., Yin, K. and Kavuri, S. N. (2003). A review of process fault detection and diagnosis, Computers & Chemical Engineering 27(3): 293–311. Wang, L., Zhang, H. and Xue, H. (2012). Fault prognostics and reliability estimation of dc motor using time series analysis based on degradation data, Journal of Theoretical and Applied Information Technology 45: 568–572. Yan, J., Koç, M. and Lee, J. (2004). A prognostic algorithm for machine performance assessment and its application, Production Planning & Control 15(8): 796–801. Yin, C. Y., Lu, H., Musallam, M., Bailey, C. and Johnson, C. M. (2008). A physics-of-failure based prognostic method for power modules, 2008 10th Electronics Packaging Technology Conference, IEEE.
Download