Uma equação de duas variáveis representa, geometricamente, uma reta
no plano.
Exemplo: x + y = 1
Na forma da função afim:
y = x + 1
Temos uma variável livre: x. O valor de y depende do valor de x escolhido,
que pode ser qualquer valor real. A reta é unidimensional. Na reta temos
infinitos pontos, não apenas o que o gráfico mostra.
Se o grau da equação não fosse um, o gráfico seria curvo, ou melhor,
possuiria curvatura. Por exemplo: y= 2x2 – 3x + 6 é uma parábola. A equação
y=
1
, grau 1, é uma hipérbole.
x
O que representa uma equação com três variáveis?
Uma equação LINEAR com três variáveis do tipo ax + by + cz = k, onde a, b,
c e k são números reais. Por analogia ao caso com duas variáveis, podemos
deduzir que este objeto é bidimensional, uma superfície, pois com três
variáveis só conseguiremos uma solução que verifique a equação se
atribuirmos dois valores aleatórios e calcular o terceiro, por exemplo,
atribuir um valor de z e um valor a y e calcular x. Ou seja, temos duas
variáveis livres. Também podemos deduzir que este objeto está inserido no
espaço tridimensional, assim como a reta está inserida no plano (espaço
bidimensional). Analogamente, podemos dizer que essa superfície tem
infinitos pontos é ilimitada e não possui curvatura. Que superfície seria
essa?
UM PLANO.
A interpretação geométrica é análoga ao sistema com duas equações e
duas incógnitas, pois a solução de um sistema é o conjunto de valores que
satisfazem as equações ao mesmo tempo. Resolver um sistema de duas equações
e três incógnitas é equivalente a encontrar a intersecção existente entre
dois planos. O tipo de intersecção entre dois planos define a posição
relativa entre em eles.
Temos três posições relativas possíveis: Paralelos, coincidentes e
concorrentes.
=
1 2 = 1
= t
Exemplos:
Determine a posição relativa entre os planos abaixo:
(a) 1 : 2x + 3y + 6z = 5 e : 4x + 6y + 12z = 8.
(b) 1: 2x + 3y + 6z = 5 e 2: 4x + 6y + 12z = 10.
(c) : 2x + 3y + 6z = 5 e : 2x + y – 3z = 1.
Assim como retas são identificadas por letras minúsculas do nosso alfabeto,
planos são identificados por letras gregas.
1
Continuando a analisar a intersecção entre, agora três planos, os
casos já não são tão simples e poucos. Para estudarmos qual a posição
relativa entre estes planos precisamos fazer um estudo mais profundo do
que simplesmente analisar a classificação do sistema, se SPD, SPI ou SI.
Será mostrado aqui um caso proveniente de cada tipo de classificação. Uma
posição relativa para SPD, uma posição relativa para SPI, e uma posição
relativa para SI.
Observação: Cada solução de um sistema é um ponto em comum entre os três
planos. Se o sistema é SPD, possui uma solução, ou seja, UM PONTO de
intersecção, se o sistema é SPI, existem infinitas soluções, ou seja,
infinitos pontos em comum entre os planos. Se e o sistema é SI, não possui
solução, isto é, os três planos não possuem pontos em comum.
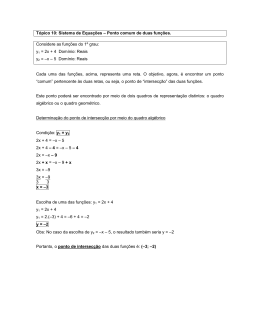
(a) Uma solução: Se o sistema é SPD, encontrarmos
um trio-ordenado (x,y,z) que satisfaz as três
equações. A interpretação geométrica é que os
três planos têm em comum um único ponto. Não há
outra posição relativa, cujo sistema seja SPD.
Indicado pelo ponto vermelho. Veja que cada par
de planos existe uma
reta de intersecção, as
três
retas
se
interseccionam
num
único ponto.
Exemplo
dessa
situação
são
os
planos
coordenados, cuja intersecção é a origem O do
sistema cartesiano ortogonal tridimensional.
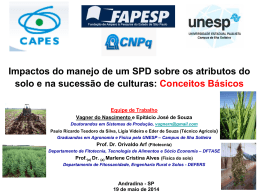
(b) Infinitas soluções: Se o sistema é SPI,
encontramos
infinitos
trio-ordenados
(x,y,z) que satisfazem as três equações. A
interpretação geométrica não é uma só, ou
melhor, a posição dos planos admite mais de
uma possibilidade. Uma delas é o exemplo ao
lado, todos os planos concorrem em uma
reta, indicada em vermelho. Existem mais
duas posições relativas associadas a
sistemas SPI.
As desenhe abaixo:
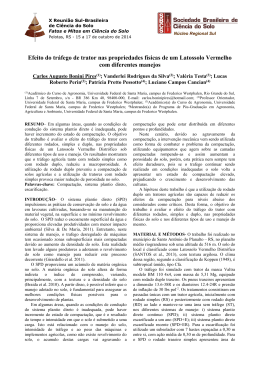
(c) Não possui solução: Se o sistema é SI, não é
possível encontrar nenhum trio-ordenado que
satisfaça as três equações AO MESMO TEMPO.
Novamente, a interpretação geométrica não é uma
só. Uma da possibilidade é ter dois planos
paralelos e outro oblíquo. Dessa forma os planos
se interseccionam por pares formando retas, mas
elas são paralelas e assim não se interseccionam,
por isso nenhum ponto dessas retas pode ser comum
aos três planos ao mesmo tempo. Existem mais três
possibilidades de posições relativas entre três
planos relacionados a sistemas SI.
As desenhe abaixo:
Tomando como base que sabemos agora determinar quando dois planos são
paralelos, coincidentes e concorrentes, podemos analisar a posição relativa
com três planos analisando dois a dois. Existem três posições relativas em
que não há planos paralelos ou planos coincidentes. Nesse caso só a
classificação do sistema relativo pode determinar qual é essa posição.
Dentre os desenhos que fizeste, ou os que já estavam prontos circule estes
casos.
Exemplos:
Determine a posição relativa entre os planos abaixo:
: 2x + 3y + 6z = 5, : x – y + z = 3 e : 3x + 2y + 7z = 8.
1. Determine a posição relativa entre os planos e descritos abaixo.
Para os planos que forem concorrentes determine a equação da reta comum
aos planos:
(a) : 3x + 2y + z = 1 e : 2x – y + 4z = 5
(b) : 4x + y – z = 0 e : 2x – y + 3z = 4
(c) : 2x – 5y + z = 3 e : 8x – 20y + 4z = 4
(d) : 4x – 6y + 2z = 18 e : 6x – 9y + 3z = 27
2. Temos oito posições relativas possíveis para três planos, , e .
Associe cada sistema abaixo com uma dessas posições relativas, justificando
sua resposta.
x y z 1
(a) x 2y 2z 3
x y z 2
3x 2y z 0
(f) x 5y z 1
5x 8y z 5
x y z 1
(b) 2x y z 3
5x 2y 4z 6
3x 6y 9z 3
(g) 5x 10y 15z 2
x 2y 3z 1
x 2y z 3
(c) 2x 4y 2z 1
3x 6y 3z 3
3x 2y z 3
(h) x 2y z 14
4x 8y 4z 1
x y 3z 1
(d) 2x y 5z 6
3x 2y z 7
6x 2y 4z 2
(e) 3x y 2z 1
15x 5y 10z 5
(a) S y 5 3t
2 t
x 3
7 5t
(b) S y
3
z t; t lR
(d)S={(3,2)}
(e) S =
x 14 3t
z t; t lR
x
y
(g) S
z
w
14 12t
13 17t
2
9 9t
2
t; t lR
3t
x 4
y t
(c) S
2
3t
z
2
w t; t lR
x 1 2k
y 12 7k
(f) S
z 10 6k
t k; t lR
10 19t
x
8
2 9t
(h) S y
8
z t; t lR
Download