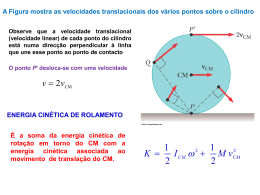
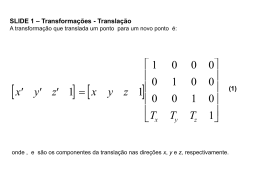
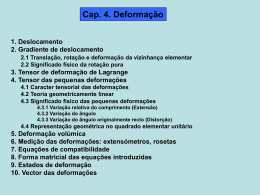
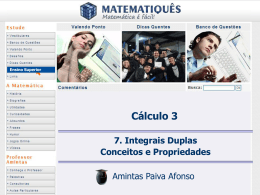
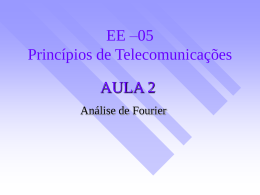
CONVERSÃO MATRICIAL DE SEGMENTOS DE RETA ATRIBUTOS DESEJÁVEIS • • • • • Linearidade: o arranjo dos pixels devem dar a aparência de estarem todos sobre um segmento de reta Intensidade ou espessura uniforme: a imagem do segmento não varia de extensão ao longo da sua extensão Continuidade: sem interrupções Precisão: a imagem inicia-se e termina nos pontos especificados Intensidade independente da inclinação: segmentos de diferentes inclinações possuem imagens de mesma intensidade CONVERSÃO MATRICIAL DE SEGMENTOS DE RETA ALGORITMO 1 var x,y,x1,x2, y1, y2: inteiro; a: real; begin a := (y2-y1) / (x2-x1); for x := x1 to x2 do begin y := round ( y1 + a * (x2 – x1)); PintaPixel (x,y); end; end; CONVERSÃO MATRICIAL DE SEGMENTOS DE RETA ALGORITMO BRESENHAM (1965) var x, y, x1, x2, y1, y2, s: inteiro; y := y1; dy := 2*(y2 – y1); dx := - 2*(x2 – x1); s := -(x2-x1) + dy; for x := x1 to x2 do begin PintaPixel (x,y); if s > 0 then begin s := s + dx + dy; y := y+1; end; else s := s + dy; end; TRANSFORMAÇÕES BIDIMENSIONAIS Dois aspectos da formulação das transformações devem ser enfatizados: 1) Uma transformação é uma entidade matemática única e, como tal, pode ser denotada por um único nome ou símbolo; 2) Duas transformações podem ser combinadas, ou concatenadas, para a obtenção de uma única transformação que tenha os mesmos efeitos obtidos pela aplicação sequencial das duas originais. Assim, a transformação A poderia ser uma translação e a transformação B uma mudança de escala. A propriedade de concatenação nos permite determinar uma transformação C=AB, cujo efeito é transladar e então escalar o objeto. TRANSFORMAÇÕES BIDIMENSIONAIS Os princípios de denotação e concatenação irão pertencer a todas as transformações descritas : recorte (clipping), apresentação em janela (windowing) e transformações tri-dimensionais e de perspectiva. Cada uma destas transformações é usada para gerar um novo ponto (x’, y’) a partir das coordenadas de um ponto (x, y) proveniente da descrição da figura original. Se a definição original inclui uma linha, é suficiente aplicar a transformação aos pontos da extremidade e mostrar a linha entre os dois pontos transformados. TRANSFORMAÇÕES BIDIMENSIONAIS - A forma da transformação de translação é: x’ = x + Tx y’ = y + Ty TRANSLAÇÃO TRANSFORMAÇÕES BIDIMENSIONAIS Rotação Para rodar um ponto (x, y) de um ângulo em sentido horário, em torno da origem do sistema de coordenadas, devemos escrever: x’ = x cos + y sin y’ = -x sin + y cos O triângulo (20, 0), (60, 0), (40, 100) rotacionado 45 (sentido horário) em torno da origem é (14.14, -14.14), (42.43, -42.43), (98.99, 42.43), e está mostrado na figura 2. Estas equações podem ser usadas somente se a rotação é em torno da origem do sistema de coordenadas. TRANSFORMAÇÕES BIDIMENSIONAIS Figura 2 - Rotação em torno da origem TRANSFORMAÇÕES BIDIMENSIONAIS – MUDANÇA DE ESCALA As transformações de escala x’ = xS x y’ = ySy podem ser usadas para diversos fins. Se a figura deve ser ampliada para duas vezes o seu tamanho original, nós devemos escolher Sx = Sy = 2. Note que a ampliação é relativa à origem do sistema de coordenadas. O triângulo (20, 0), (60, 0), (40, 100) passa a ser (40, 0), (120, 0), (80, 200), como mostrado na figura 3. Figura 3 - Mudança de Escala em relação à origem TRANSFORMAÇÕES BIDIMENSIONAIS Figura 6 - Ordem diferente de transformações TRANSFORMAÇÕES BIDIMENSIONAIS – FORMULAÇÃO MATRICIAL x' y ' 1 x a y 1b c d e f 0 0 1 FORMULAÇÃO MATRICIAL– TRANSLAÇÃO x' y ' 1 x 1 y 1 0 Tx 0 1 Ty 0 0 1 FORMULAÇÃO MATRICIAL – ROTAÇÃO x' y' 1 x cos y 1 sin 0 sin cos 0 0 0 1 FORMULAÇÃO MATRICIAL – MUDANÇA DE ESCALA x' y' 1 x S x y 10 0 0 Sy 0 0 0 1 CONCATENAÇÃO DE TRANSFORMAÇÕES MATRICIAIS Supondo-se que: x' y' 1 x 2 0 0 y 1 0 2 0 0 0 1 1 0 0 y 1 0 1 0 10 0 1 E que: x y 1 x CONCATENAÇÃO DE TRANSFORMAÇÕES MATRICIAIS Portanto: x y 1 x 2 0 0 1 0 0 y 1 0 2 0 0 1 0 0 0 1 10 0 1 RESULTANDO: x y 1 x 2 0 0 y 1 0 2 0 10 0 1 TRANSFORMAÇÕES COMPLEXAS A transformação de rotação pode ser aplicada para rodar pontos somente em torno da origem. Portanto, se desejamos derivar uma transformação que irá rodar um ponto de um ângulo Ø em torno do ponto (Rx, Ry), primeiro precisamos transladar os pontos de tal forma que (Rx, Ry) coincida com a origem. x' y ' 1 x 1 y 1 0 Rx 0 1 Ry 0 0 1 Então a rotação pode ser aplicada x y 1 x cos y 1 sin 0 sin cos 0 0 0 1 TRANSFORMAÇÕES COMPLEXAS E finalmente, transladamos o ponto de tal forma que a origem retorne para (Rx, Ry): x y 1 x 1 y 1 0 Rx 0 1 Ry 0 0 1 TRANSFORMAÇÕES BIDIMENSIONAIS Estas transformações podem ser concatenadas x y 1 x 1 y 1 0 R x 0 1 Ry 0 cos 0 sin 1 0 sin cos 0 0 1 0 0 1 Rx 0 1 Ry Se os valores de Rx, Ry e Ø forem conhecidos, as três matrizes podem ser multiplicadas para se tornar uma só matriz de transformação. 0 0 1 CONVERSÃO MATRICIAL DE SEGMENTOS DE RETA (EXERCÍCIOS) 1. Descreva um algoritmo para encontrar os parâmetros da matriz de escalamento (e se necessário, os parâmetro da matriz de rotação) para uma figura que será desenhada sobre uma superfície retangular (folha de papel, tela, etc.) visando normalizá-la para ocupar o máximo espaço desta superfície, sem deformá-la. O algoritmo deve prever o caso, da figura necessitar sofrer uma rotação visando otimizar o preenchimento da superfície. A figura encontra-se armazenada através das coordenadas absolutas de suas primitivas sendo que, no início do arquivo encontram-se armazenados os valores de Xmin, Ymin, Xmax e Ymax que correspondem respectivamente à menor abscissa, menor ordenada, maior abscissa e maior ordenada da figura. Também, como entrada para este algoritmo considere a superfície com diagonal nos pontos (0,0) e (Xs, Ys). Para cada uma das transformações utilizadas no algoritmo, descrever seus parâmetros. 1. Suponha que conheçamos um ponto (x’ , y’) e o fato de ele ser a transformação de um ponto desconhecido (x , y), transformado pela matriz Q. Descreva um mecanismo para encontrar o ponto original (x,y) . Para que área da computação gráfica este algoritmo poderia ser útil ? CONVERSÃO MATRICIAL DE SEGMENTOS DE RETA (EXERCÍCIOS) 3. Prove a afirmação de que a transformação de uma linha entre dois pontos A e B é equivalente à linha entre os pontos gerados pelas transformações do ponto A e a transformação do ponto B. Considere apenas as transformações de translação, rotação e mudança de escala. 4. A formulação matricial sugere outras transformações que nós não consideramos, por exemplo, a transformação x’ = x + ay e y’ = y. Você é capaz de caracterizar estas transformações?
Download