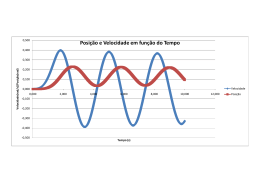
XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS ID-07 CINEMÁTICA DE UM MECANISMO ARTICULADO COM DESLIZAMENTO E ACELERAÇÃO DE CORIOLIS Carlos Sergio Pivetta – [email protected] Osvaldo Prado de Rezende – [email protected] Mário Luis Campos – [email protected] Roberto Grechi – [email protected] CETEC Educacional SA, ETEP Faculdades - Engenharias Av. Barão do Rio branco, 882 Jardim Esplanada 12223-670 – São José dos Campos – SP José Geraldo Trani Brandão – [email protected] UNESP – Universidade Estadual Paulista, Av. Ariberto Pereira da Cunha, 333 – Bairro Pedregulho, 12516, Guaratinguetá - SP Resumo. O projeto de mecanismos articulados envolvendo elementos em movimento de rotação e de deslizamento simultaneamente resulta em cálculos cinemáticos relativamente complexos visto que há a presença da componente de aceleração de Coriolis. Este trabalho apresenta uma alternativa que permite obter resultados altamente precisos, de acordo com as necessidades, e que demandam pequenos esforços matemáticos e computacionais. Os conceitos fundamentais da Cinemática são aplicados juntamente com um procedimento matemático para os cálculos das velocidades e das acelerações dos pontos de interesse do mecanismo. É apresentado um estudo de caso em que são calculadas as velocidades e as acelerações dos pontos de interesse para cada posição da barra de entrada (barra acionadora), do sistema articulado. Observa-se em função dos procedimentos apresentados neste trabalho e dos resultados obtidos que há facilidade de implementação, precisão e confiabilidade. Palavras-chave: Cinemática de mecanismos, Aceleração de Coriolis em mecanismos articulados, Velocidade e aceleração de elementos deslizantes. 1. INTRODUÇÃO Os sistemas mecânicos durante o funcionamento, se não forem devidamente projetados e avaliados, podem causar problemas que o corpo humano ou os materiais podem não suportar. Norton (2010) apresenta uma abordagem da tolerância humana à aceleração, a qual deve ser de grande interesse e valor na execução de projetos. É muito comum expressar a aceleração baseada na aceleração da gravidade. Norton (2010) apresenta os níveis aproximados de aceleração em “g´s” que os serem humanos enfrentam todos os dias. O conhecimento das velocidades e das acelerações de determinados pontos dos sistemas mecânicos torna-se muito importante para se evitar os problemas que comumente se apresentam, tais como, vibrações, forte sensibilidade do ser humano e de materiais aos excessivos valores das acelerações. Geralmente encontram-se dificuldades na determinação das velocidades e das acelerações de sistemas mecânicos nos casos em que há elementos em movimentos relativos de rotação e de translação simultaneamente. As velocidades e as acelerações são importantes no resultado do funcionamento do mecanismo e a determinação pode ser feita por procedimentos gráficos, mas não permitem alta precisão nos resultados e destinam-se a poucos pontos de interesse. Ao se utilizar os procedimentos gráficos para a análise cinemática empregando sistemas auxiliares de desenho os erros podem ser minimizados e também o respectivo tempo de análise (FLORES e CLARO, 2007). Os procedimentos analíticos demandam elevados esforços matemáticos para se obter os resultados desejados. Este trabalho tem o objetivo de propor e demonstrar um método de determinação da velocidade e da aceleração dos pontos de interesse dos sistemas mecânicos compostos de elementos que ao funcionarem realizam movimentos de rotação e de deslizamento relativo entre si. Uma metodologia para calcular a velocidade e a aceleração de pontos de interesse de um mecanismo é apresentada, à partir da publicação de Mansour e Osman (1970), na qual foi aplicada uma pequena perturbação na barra de entrada do mecanismo para determinar as posições dos pontos desejados. Este trabalho poderá contribuir com o aperfeiçoamento e Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS desenvolvimento da Engenharia no Brasil, visto que são abordadas metodologias computacionais de relativa facilidade de utilização. 2. METODOLOGIA A Figura 1 ilustra um sistema mecânico que possui movimentos de rotação e de translação relativos entre si (NORTON, 2010). O desenvolvimento da metodologia deste trabalho é baseado na publicação da solução dos cálculos cinemáticos do mecanismo de plaina limadora, também denominado de mecanismo de retorno rápido para a fase (posição) ilustrada na Figura 1. θ2 Figura 1 – Mecanismo de referência para a análise cinemática: (a) Fase do mecanismo, (b) Posição angular da barra de entrada (Modificado de NORTON, 2010). A barra 2, cujo raio tem dimensão L2 = 20,3 mm gira em torno do ponto fixo O2 no sentido anti-horário à uma velocidade angular no valor de ω2 = 40 rad/min, e neste trabalho será considerada uma aceleração angular nula α2 = 0 rad/min2. A barra 2 está acoplada a uma peça 3 montada no ponto A por meio de um pino o qual permite rotação em relação a barra 2, constituindo-se assim uma junta rotacional. O elo 3 desliza guiado, por exemplo, por um rasgo, sobre o elo 4 que oscila em torno do ponto fixo O4 em função do movimento da barra 2 e das restrições geométricas do sistema. Desta forma, de acordo a ilustração da Figura 1, existem três pontos coincidentes na mesma posição “A” denominados de A2 do elo 2, A3 do elo 3 e A4 do elo 4. Um mecanismo semelhante ao da Figura 1, com dimensões diferentes, foi publicado por Mabie e Ocvirc (1980) e a análise cinemática foi realizada pelo método gráfico. Mabie e Reinholtz (1987) também publicaram mecanismos semelhantes em unidades inglesas, e foi resolvido pelo processo gráfico. Ambas publicações foram utilizados os recursos vetoriais de velocidade e de aceleração relativas. No exemplo do esquema da Figura 1, a componente de Coriolis da aceleração está presente e de acordo com Norton (2010) deverá ser sempre considerada quando houver uma velocidade de deslizamento associada a qualquer membro que também tenha velocidade angular. O mesmo autor também alerta de que ao se fazer a análise gráfica para a aceleração, é necessária atenção para reconhecer, calcular e introduzi-la no diagrama vetorial. Este aspecto citado torna-se um problema sério para os estudantes de engenharia ou os profissionais iniciantes. Ao considerar a trajetória de um ponto P genérico do mecanismo. Conhecendo-se o ângulo θ2 de posição da barra de entrada pode-se determinar a posição do ponto P. Utilizando-se pequenos incrementos Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS aplicados no ângulo θ2 da barra de entrada do sistema, que representam uma perturbação de proximidade da posição anterior, pode-se calcular a nova posição do ponto P, denominado de Pi+1, após este deslocamento. A Figura 2 ilustra uma trajetória genérica de um ponto P saindo da posição inicial Pi-1, passando pela posição atual Pi e chegando na posição final Pi+1 (PIVETTA et al., 2009). Figura 2 – Ilustração de uma trajetória genérica do ponto P. Considerando-se que o ponto P genérico poderá ser especificamente os pontos A2, A3 ou A4 do sistema da Figura 1 podem-se utilizar as os conceitos descritos para a aplicação do método proposto para estes pontos. A velocidade e a aceleração de um ponto de interesse de um mecanismo articulado podem ser determinadas utilizando-se as Equações 1 e 2 (MABIE e OCVIRK, 1980; MABIE e REINHOLTZ, 1987; UICKER, PENNOCK e SHIGLEY, 2003; NORTON, 2010). ∆R P v P = lim ∆t →0 ∆t (1) ∆v a P = lim P ∆t →0 ∆t (2) Ao se substituir ∆RP pelos deslocamentos relativos ∆S nas direções x e y na Equação 1 podem-se determinar as velocidades médias no intervalo e a respectiva resultante. Ao se substituir ∆VP pelas diferenças de velocidades dos sucessivos intervalos podem-se determinar as acelerações médias do ponto P nas direções x e y e suas respectivas resultantes. Se o elo de entrada da Figura 1 girar com uma velocidade constante, que é o caso do exemplo aqui em estudo, o valor de ∆t pode ser calculado pela Equação 3, obtido em segundos ao se utilizar ∆θ2 em graus e ω2 em rad/s. ∆t = 2 π ∆θ2º / ( 360º ω2 ) (3) Para a Figura 1, ao se utilizar o incremento angular ∆θ2= 1º no ângulo de posição θ2 da barra de entrada pode-se obter o valor aproximado de ∆t = 0,02618 segundos. As velocidades e as acelerações do ponto P genérico nas direções x e y e os respectivos módulos genérico podem ser determinados pelas Equações 4 à 9. Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS vxPi = ( xPi - xPi-1 ) / ∆t (4) vyPi = (yPi – yPi-1) / ∆t (5) vPi = (vxPi 2 + vyPi 2)1/2 (6) axPi = (vxPi – vxPi-1) / ∆t (7) ayPi = (vyPi – vyPi-1) / ∆t (8) aPi = (axPi 2 + ayPi 2)1/2 (9) Estabelecendo-se um sistema de coordenadas global com a origem no ponto O2 do esquema da Figura 1, o qual é o centro de rotação da barra 2, pode-se, por meio da Figura 3, observar as variáveis à serem utilizadas. O ponto O2 é o centro de rotação da barra de entrada 2 que gira em velocidade angular constante no sentido anti-horário (SAH). A posição “A” do mecanismo contém os pontos A2, A3 e A4 pertencentes às barras 2, 3 e 4 respectivamente no mesmo instante. A posição do ponto O4 em relação ao ponto O2 é definida pela notação dada O2O4 = 47,0 @ 278,5º, o que se refere às coordenadas em relação à origem O2 as coordenadas relativas de xO4 = 6,947 mm e yO4 = -46,484 mm. As coordenadas do ponto A e do ponto B serão denominadas respectivamente de xA, yA e xB, yB. As coordenadas dos pontos A2, da peça 2, A3 da peça 3 e A4 da peça 4 serão denominadas de xA2, yA2 , xA3, yA3 e xA4, yA4, respectivamente. θ6 C B X θ2 O2 X h ω2 A θ4 O4 Figura 3 – Ilustração do sistema de coordenadas e variáveis. De acordo com o esquema da Figura 3 e aplicando a geometria analítica pode-se determinar as coordenadas de posição xA2 e yA2 do ponto A2 conhecendo-se o a posição angular θ2 utilizando-se as Equações 10 e 11, respectivamente. xA2 = R2 cos θ2 (10) yA2 = R2 sen θ2 (11) Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS Conhecendo-se as coordenadas do ponto A2 para a posição angular θ2 da barra de entrada podem-se determinar as velocidades e as acelerações médias deste ponto utilizando-se os conceitos análogos das Equações 4 a 9. O ângulo de posição θ4 da barra 4 para cada posição do ângulo θ2 da barra de entrada pode ser determinado pela Equação 12. θ4 = tg-1 ( (yA2 - yO4 ) / ( xA2 – xO4) ) (12) Ao se aplicarem os conceitos das Equações 1 e 2 usando os valores θ4 em lugar de ∆RP pode-se obter a velocidade angular média da barra 4 no intervalo de tempo ∆t , usando-se a Equação 13. ω4i = ( θ4i – θ4i-1 ) / ∆t (13) As designações θ4i e θ4i-1 representam as posições angulares atuais e anteriores da barra 4, e ω4i as suas respectivas velocidades angulares. Ao se observar os valores obtidos de ω4i, quando forem positivos, significam sentidos anti-horários (SAH) e negativos, sentidos horários (SH). Conhecendo-se as coordenadas do ponto A2 para a posição angular θ2 da barra de entrada podem-se determinar as velocidades e as acelerações médias deste ponto utilizando-se analogamente as Equações 4 a 9. A distância O4A, a que representa O4A4, é o valor do raio R4 e seu valor, em relação ao centro de rotação O4 pode ser determinado pela Equação 14. R4 = ( (xA2 – xO4 ) 2 / ( yA2 – yO4 ) 2 ) -1/2 (14) Ao se aplicar analogamente as Equações 1 e 2 podem-se determinar os módulos das velocidades e das acelerações do ponto A4, e portanto, os módulos das velocidades e das acelerações normais e tangenciais dos pontos A4, utilizando-se as Equações 15 a 17. vA4 = ω4 . R4 (15) aNA4 = (vA4)2 / R4 (16) aTA4 = α4 . R4 (17) Os módulos das velocidades e das acelerações do ponto B podem ser determinados utilizando-se as Equações 18 a 20, analogamente às Equações utilizadas para o ponto A4. vB = ω4 . O4B (18) aN B = (vB)2 / O4B (19) aT B = α4 . O4B (20) Os valores das velocidades e das acelerações de deslizamento do bloco 3 guiado sobre o elo 4 (ponto A3), aqui denominados de vA4A2 e aA4A2, respectivamente, podem ser determinados usando-se as Equações 21 e 22, analogamente às Equações utilizadas para o ponto A4. vA4A2 = ( R4i - R4i-1 ) / ∆t (21) aA4A2 = (vA4A2 i - vA4A2 i-1 ) / ∆t (22) Os sinais positivos dos valores das velocidades vA4A2 significam que o bloco deslizante 3 (ponto A3) está se movimentando para a periferia e os negativos, para o centro de rotação O4 da barra 4. Os sinais positivos dos valores das acelerações aA4A2 significam que o bloco deslizante 3 está se movimentando acelerando para a periferia e os negativos, acelerando para o centro de rotação O4 da barra 4. Os valores das componentes das acelerações de aC ( aceleração de Coriolis ) podem ser determinados pela Equação 23. Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS aC = 2 . vA4A2 . ω4 (23) É importante apresentar, de acordo com Soni (1974), o esquema ilustrado na Figura 4 para a interpretação do sentido da aceleração de Coriolis que pode ser obtida com sinal positivo ou negativo por meio da Equação 23. Pode-se observar que se a aceleração de Coriolis “aC” obtida tiver sinal positivo, seu sentido será de forma que contribua com a aceleração angular da barra 4 no sentido anti-horário, ou seja, no mesmo sentido da orientação da aceleração angular positiva α4, caso contrário, será no sentido horário. O que foi descrito poderá ser visto na Figura 4. y y aC ω4 vA4 vA4 ω4 aC O4 x y O4 x y aC vA4 vA4 ω4 ω4 O4 x aC O4 x Figura 4 - Sentido da componente da aceleração de Coriolis – aC (Modificado de SONI, 1974). A posição do ponto B, refere-se às coordenadas xB e yB, pode ser determinada pelas Equações 24 e 25. xB = L4 . cos θ4 – xAO4 (24) yB = L4 . sen θ4 – yAO4 (25) A posição do ponto C corresponde ao ponto de referência do bloco deslizante 6, o qual está acoplado à barra 5 por um pino que permite a rotação do bloco no ponto C, tem a ordenada num valor fixo, determinada pela Equação 26, e depende da posição do ponto B. (26) yC = h – yO4 O ângulo de posição da barra 6, θ6 pode ser determinado pela Equação 27 e a abscissa xC pode ser obtida pela Equação 28. θ6 = 180 + sen-1 (( h – yB – yO4) / L5 ) (27) (28) xC = L4 . sen θ4 – xAO4 Na análise cinemática geralmente os componentes são considerados como corpos rígidos, ou seja, sem deflexões ou sem deformações. As juntas são consideradas sem folgas ou sem interferências e as dimensões são consideradas nominais, sem variações dimensionais. Estas considerações serão utilizadas neste trabalho. Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS 3. RESULTADOS O procedimento proposto neste trabalho foi utilizado e comparado com o exercício resolvido pelo método gráfico publicado por Mabie e Ocvirc (1980) para o sistema mecânico ilustrado na Figura 5 e estão apresentados na Tabela 1. Os autores realizaram a análise cinemática pelo método gráfico, conforme mencionado na referencia. Ao se considerar a posição da barra 2 de entrada, em função das dimensões estabelecidas na Figura 5, o valor da posição angular resulta em aproximadamente de θ2 = 218,7º. Os valores obtidos pelo método proposto observando-se a Tabela 1 podem ser comparados com os valores publicados. Foi utilizado um incremento angular na posição da barra de entrada de ∆θ2 = 0,1º, o incremento angular ∆θ2 é ∆t = 1,745 . 10-4 segundos. θ2 Figura 5 – Mecanismo de referência para a comparação da análise cinemática ilustrando a fase do mecanismo (Modificado de MABIE e OCVIRK, 1980). Tabela 1. Comparativo dos resultados da análise cinemática para θ2 = 241º Parâmetro Unidade vA4 vA4A2 aA4 aTA4 ω4 α4 AC m/s m/s m/s2 m/s2 rad/s rad/s2 m/s2 Resultados de Mabie e Ocvirc (1980) 0,325 0,950 11,88 11,85 1,30 (SAH) 47,4 (SH) 2,47 Resultados do método proposto 0,35 0,94 12,01 12,00 1,4 (SAH) 48,03 (SH) 2,63 Os resultados obtidos utilizando o método proposto para o problema da Figura 1 são apresentados na Figura 6. Na Figura 6a) é apresentado o gráfico das velocidades, nas direções x e y e a resultante, do ponto B para as respectivas posições angulares θ2 da barra de entrada do elo 2 e na Figura 6b) é apresentado o gráfico das velocidades do ponto C para as respectivas posições angulares θ2 da barra de entrada do elo 2. A Figura 7 apresenta os resultados da aceleração dos pontos B e C. Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS vB vyB vxB a) b) Figura 6 – Velocidades dos pontos do mecanismo em função da posição da barra de entrada: Figura 6a) Velocidades das componentes nas direções x e y e do módulo ponto B, Figura 6b) - Velocidade do ponto C. aB θ2 θ2 ayB axB a) b) Figura 7 – Acelerações dos pontos do mecanismo em função da posição da barra de entrada: Figura 7a) Acelerações das componentes nas direções x e y e do módulo ponto B, Figura 7b) - Aceleração do ponto C. ω4 α4 ωCB θ2 a) αCB θ2 b) Figura 8 – Velocidades angulares das barras 4 e 5 (barra CB)em função da posição da barra de entrada: Figura 8a) - Velocidades angulares das barras, Figura 8b) – Acelerações angulares das barras. A Figura 9 ilustra a velocidade e a aceleração de deslizamento do bloco 3. A Figura 9a) ilustra a velocidade de deslizamento vA4A2 do bloco 3 sobre a peça 4, quando for positiva, o bloco está movendo no sentido para a periferia. A Figura 9b) ilustra a aceleração do bloco 3 sobre a peça 4, quando for positiva, o bloco está acelerando no sentido para a periferia. Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS θ2 θ2 a) b) Figura 9 – Velocidade e aceleração de deslizamento do bloco 3 sobre a peça 4: Figura 9a) - Velocidade do bloco 3, Figura 9b) - Aceleração do bloco 3. A Figura 10 ilustra a participação da componente de Coriolis “aC” comparada com as outras acelerações e outras condições de velocidades da barra de entrada para o ponto A das peças 3 e 4. A Figura 10a) ilustra a aceleração de Coriolis “aC” com outras acelerações do ponto A. A figura 10b) ilustra a aceleração de Coriolis “aC” para 3 níveis de velocidades angulares ω2 da barra de entrada 2. ω2= 120 rad/min aA4A2 ω2= 80 rad/min aA4 aC ω2= 40 rad/min θ2 b) a) Figura 10 – Componente de Coriolis “aC” comparada com as outras acelerações e outras condições de velocidades do ponto A: Figura 10a) - Comparação da componente de Coriolis “aC” com aA4 e de A4A2, Figura 10b) - Aceleração de Coriolis “aC” para 3 níveis de velocidades angulares ω2 da barra de entrada 2. A Figura 11 ilustra a velocidade e a aceleração do ponto C para 3 níveis diferentes de velocidades angulares ω2 da barra de entrada 2 em todo o ciclo de funcionamento. A Figura 11a) ilustra as velocidades do ponto C e a Figura 11b) ilustra as acelerações do ponto C. A Figura 12 ilustra as velocidades e as acelerações angulares da barra 4 para 3 níveis diferentes de velocidades angulares ω2 da barra de entrada 2 em todo o ciclo de funcionamento. A Figura 12a) ilustra as velocidades angulares da barra 4 e a Figura 12b) ilustra as acelerações angulares da barra 4. A Figura 13 ilustra as posições angulares das barras 4 e 5 (barra CB) em função da posição angular da barra de entrada 2, com variação respectiva de 1 grau. ω2= 120 rad/min ω2= 80 rad/min Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. ω2= 80 rad/min XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS ω2= 120 rad/min ω2= 40 rad/min ω2= 40 rad/min θ2 θ2 b) a) Figura 11 – Velocidades e as acelerações do ponto C para 3 níveis diferentes de velocidades angulares ω2 da barra de entrada 2 em todo o ciclo de funcionamento: Figura 11a) - Velocidades do ponto C, Figura 11b) Acelerações do ponto C. ω2= 120 rad/min ω2= 80 rad/min ω2= 120 rad/min ω2= 80 rad/min ω2= 40 rad/min ω2= 40 rad/min θ2 θ2 a) b) Figura 12 – Velocidades e as acelerações angulares da barra 4 para 3 níveis diferentes de velocidades angulares ω2 da barra de entrada 2 em todo o ciclo de funcionamento: Figura 12a) - Velocidades angulares da barra 4, Figura 12b) - Acelerações angulares da barra 4. θ5 θ4 θ2 Figura 13 - Posições angulares θ4 e θ5 das barras 4 e 5, respectivamente, em função θ2. 4. CONCLUSÕES Os resultados deste trabalho demonstraram que os procedimentos propostos, ao se utilizar recursos computacionais relativamente simples, permitiram analisar a cinemática do mecanismo estudado em todo o Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS ciclo de funcionamento. É possível aplicar os procedimentos propostos para sistemas mais complexos de forma a minimizar os esforços na análise cinemática. Foi possível verificar por meio dos exemplos estudados e apresentados, a participação da componente de Coriolis no valor da aceleração total dos pontos avaliados, o que foi ilustrada na Figura 10a). Comparando-se o exercício resolvido pelo método gráfico (MABIE e OCVIRC, 1980) da literatura de referência com os valores obtidos neste trabalho, pode-se concluir que o procedimento proposto permite obter os dados cinemáticos com confiabilidade e precisão. Pode-se usar a metodologia para avaliar outros aspectos cinemáticos tais como as velocidades e acelerações angulares das barras movidas para qualquer posição da barra motora e para quaisquer níveis de velocidade angular da mesma, tal como foi exposto nos resultados. A utilização do método permite aumentar a precisão desejada utilizando-se um ângulo incremental menor na barra de entrada. O trabalho apresentado poderá contribuir para o desenvolvimento do estudo de mecanismos e da Engenharia no Brasil. 5. AUTORIZAÇÕES / RECONHECIMENTO Os autores são responsáveis por garantir o direito de publicar todo o conteúdo de seu trabalho. Se material com direitos autorais foi usado na preparação do mesmo, pode ser necessário conseguir a autorização do detentor dos direitos para a publicação do material em questão. Nesta seção também poderão ser incluídos reconhecimentos de apoios recebidos de indivíduos e instituições. Agradecimentos Os autores agradecem ao CETEC Educacional SA - ETEP Faculdades de Tecnologia de São José dos Campos, a UNESP - Universidade Estadual Paulista e ao CREA SP – Conselho Regional de Engenharia Arquitetura e Agronomia do Estado de São Paulo que proporcionaram condições para a realização deste trabalho, o que objetivou o aperfeiçoamento do desenvolvimento da Engenharia no Brasil. 6. REFERÊNCIAS Flores, P., Claro, J. C. P., 2007, Cinemática de mecanismos, Edições Almedina S.A., Coimbra. Mabie, H. H., Ocvirk, F. W., 1980, Mecanismos e dinâmica das máquinas, Livros Técnicos e Científicos, Rio de Janeiro. Mabie H. H., Reinholtz, 1987, C. F., Mechanisms and dynamics of machinery, , John Wiley & Sons, New York. Mansour, W. M., Osman, M. O. M, 1970, A proximity perturbation method for linkage kinematics, ASME Publication, New York. Norton, R. L., 1999, An introduction to the synthesis and analysis of mechanisms and machines, McGrawHill, New York. Norton, R. L., 2010, Cinemática e dinâmica dos mecanismos, McGraw-Hill, Porto Alegre. Pivetta, C. S., Rezende, O. P., Grechi, R., Campos, M. L., Brandão, J. G. T., 2009, Análise cinemática de mecanismos de 4 barras com abordagem geométrica e computacional, In: IX Congresso Nacional de Engenharia Mecânica e Industrial,. Anais... Campo Grande: CONEMI. 1 CD-ROM. Shigley, J. E.; Uicker, Jr, J. J., 1997, Theory of machines and mechanisms, McGraw-Hill, New York. Soni, A. H., 1974, Mechanism Synthesis and Analysis, McGraw-Hill, New York. KNEMATIC OF MECHANICAL ARTICULATED SYSTEMS WITH SLIDING AND CORIOLIS ACCELERATION Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia. XI Congresso Nacional de Engenharia Mecânica, Metalúrgica e Industrial 03 a 05 agosto de 2011, Porto Alegre - RS Abstract. The articulated mechanisms design, which Coriolis acceleration component is presented due to components in simultaneous rotation motion and sliding motion, the kinematics calculus are complex and the results of the kinematic analysis become difficult to obtain, to understand and to verify. This paper presented an alternative for kinematic analysis to get high precision results, according to necessary and demand low mathematics efforts and low computational resources. The fundamental concepts of kinematic were used together the appropriated mathematic for speeds and accelerations calculus of the mechanism interested points. It can be observed according to the presented and obtained results, which the proposed method of this implementation is simple and permit high precision and reliability on the kinematic analysis values. It could be compared with specialized publications in this subject. This analysis methodology may contribute to the Engineering development in Brazil. Key words: Coriolis acceleration, Mechanisms kinematic analysis, Mechanism kinematic with Coriolis. Copyright © 2011 ABEMEC-RS - Reprodução proibida sem autorização prévia.
Download