Transformações Lineares
Carlos Luz, Ana Matos, Sandra Nunes
Departamento de Matemática
Escola Superior de Tecnologia de Setúbal
Ano Lectivo 2004/2005
Conteúdo
1 Definição. Representação Matricial
1.1 A Composição de Transformações Lineares e o Produto Matricial . . . . . . . . . .
1.2 Mudança de Base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
10
11
2 Núcleo e Imagem de uma Transformação Linear
13
3 Inversa de uma Transformação Linear
16
4 Exercícios Resolvidos
19
5 Exercícios Propostos
26
6 Soluções dos Exercícios Propostos
28
Bibliografia
29
1
Recorde-se que uma aplicação (ou função) de um conjunto sobre outro é uma regra que, a cada
elemento do primeiro conjunto (conjunto de partida), faz corresponder um e um só elemento do
segundo (conjunto de chegada).
As transformações lineares são aplicações entre dois espaços vectoriais que, num certo sentido,
preservam as operações de adição e multiplicação escalares definidas nesses espaços.
A importância de que se revestem na resolução de diversos problemas de Engenharia, tornam as
transformações lineares um tema obrigatório de estudo num curso introdutório de Álgebra Linear.
Neste capítulo faremos uma digressão sucinta pelos aspectos essenciais das transformações lineares,
realçando, nomeadamente, as ligações estreitas existentes entre as noções de transformação linear
e de matriz.
1
Definição. Representação Matricial
Supondo fixada a base canónica em IR2 , consideremos a matriz
0 −1
A=
1
0
(1)
e o vector x = (1, 1/3) ∈ IR2 . Representando este vector pela matriz coluna
calcular o produto
Ax =
0 −1
1 0
1
1/3
=
−1/3
1
1
1/3
1
, podemos
=
y.
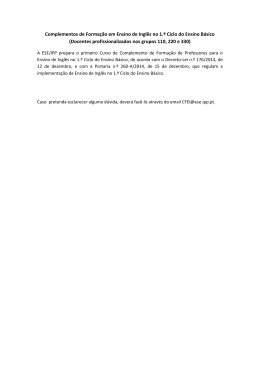
A multiplicação de A por x pode então ser vista como uma acção de transformação do vector
x = (1, 1/3) no vector y = (−1/3, 1). A figura 1 ilustra geometricamente o que aconteceu: ao ser
multiplicado por A, o vector x “sofreu” uma rotação de +90 ◦ , sendo transformado (ou aplicado)
no vector y.
−1 /3
y=
1
1
+90º
1
x=
1 /3
1
Figura 1: Rotação de +90o .
Em geral, a multiplicação da matriz A pelo vector genérico x = (x1 , x2 ) ∈ IR2 conduz ao vector
y = (−x2 , x1 ) pois
0 −1
x1
−x2
Ax =
=
=
y.
(2)
1
0
x2
x1
Geometricamente, o vector transformado y = (−x2 , x1 ) pode ser visto como o resultado da rotação
de x = (x1 , x2 ) de 90 ◦ no sentido positivo, tal como ilustra a fig. 2.
1 Não havendo perigo de confusão quanto à base fixada, identificaremos um vector de IRn com a matriz coluna
formada pelas suas componentes.
2
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
x
x = 1
x2
x2
− x2
+90º
x1
1
− x
Ax = 2
x1
x1
Figura 2: Rotação de +90 ◦ definida pela matriz A.
Deste modo, a matriz A define uma aplicação T de IR2 para IR2 , designada por rotação, que a
cada vector x ∈ IR2 associa o vector y = Ax ∈ IR2 . Simbolicamente, T pode representar-se por
T : IR2
x
→ IR2
→ y = T (x) = Ax.
O vector y = T (x) diz-se a imagem do vector x por intermédio da transformação T. Tendo em
conta (2), a rotação T pode ser, alternativamente, definida por
T :
→ IR2
IR2
(x1 , x2 ) → T (x1 , x2 ) = (−x2 , x1 ).
T diz-se uma transformação linear dado que satisfaz as condições da definição seguinte:
Definição 1.1 Sejam E e F dois espaços vectoriais sobre o mesmo corpo IK. Uma aplicação
T : E → F diz-se uma transformação (ou aplicação) linear de E em F se:
1. T (x + y ) = T (x) + T (y), quaisquer que sejam x, y ∈ E;
2. T (λx) = λT (x), quaisquer que sejam x ∈ E e λ ∈ IK.
Por outras palavras, T é uma transformação linear de E em F se a imagem da soma de dois
vectores de E é igual à soma das imagens dos vectores e a imagem do produto de um vector de E
por um escalar coincide com o produto do escalar pela imagem do vector.
Quando se considera uma transformação linear entre dois espaços vectoriais, admite-se que
estes têm o mesmo conjunto de escalares. De notar também que as duas condições da definição
anterior podem ser reunidas na condição
T (λx + µy) = λT (x) + µT (y),
para todos os vectores x e y de E e todos os escalares λ e µ de IK. De facto, esta última igualdade
é equivalente às anteriores podendo ser igualmente utilizada para definir transformação linear.
Uma transformação linear de E em F também se diz um homomorfismo. Em particular,
dir-se-á um monomorfismo se é injectiva, um epiformismo se é sobrejectiva, um isomorfismo
se é bijectiva, um endomorfismo se F = E e um automorfismo se é simultaneamente um
endoformismo e um isomorfismo.
3
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Exemplo 1.1 Comecemos por verificar que a rotação T (x) = Ax vista acima é uma transformação
linear. Com efeito, dados dois quaisquer vectores x e y pertencentes a IR2 e um escalar arbitrário
λ ∈ IR, as propriedades da multiplicação de matrizes permitem escrever
T (x + y ) = A(x + y ) = Ax + A
y = T (x) + T (y)
e
T (λx) = A(λx) = λAx = λT (x).
Mais geralmente, seja A uma matriz qualquer de tipo m × n e x um vector de IRn . A aplicação
T : IRn → IRm definida por T (x) = Ax é uma transformação linear. A verificação resulta das
propriedades da multiplicação de matrizes, tal como no caso da rotação.
Exemplo 1.2 Uma das transformações lineares mais simples é a função f : IR → IR dada for
f (x) = ax, com a ∈ IR. Esta função é representada geometricamente, num plano onde se fixou um
referencial cartesiano ortonormado, por uma recta que passa pela origem e tem declive a. Com
efeito, f é uma transformação linear pois, para quaisquer x, y ∈ IR e λ ∈ IR, tem-se
f (x + y) = a(x + y) = ax + ay = f (x) + f (y)
e
f(λx) = a(λx) = λ(ax) = λf (x).
Por outro lado, já a função quadrática f(x) = x2 (representada geometricamente por uma parábola)
não é uma transformação linear pois, por exemplo, para x = 1 e y = 1, tem-se f(1 + 1) = f (2) =
22 = 4 e f(1) + f (1) = 12 + 12 = 2. Assim,
f (1 + 1) = f (1) + f(1),
e, portanto, a primeira condição da definição 1.1 não se verifica.
Vejamos algumas propriedades das transformações lineares.
Proposição 1.1 Sejam E e F dois espaços vectoriais sobre o corpo IK e T uma transformação
linear de E em F. Então vale o seguinte:
(a) T (0E ) = 0F , onde 0E e 0F designam respectivamente os vectores nulos de E e F.
(b) T (−x) = −T (x),
∀x ∈ E
(c) T (x − y) = T (x) − T (y ),
∀x, y ∈ E.
(d) Se x = λ1v1 + · · · + λpvp , com v1 , . . . , vp ∈ E e λ1 , . . . , λp ∈ IK, então
T (x) = T (λ1v1 + · · · + λpvp ) = λ1 T (v1 ) + · · · + λp T (vp ).
Demonstração Para provar (a) recorde-se que 0IKx = 0E para qualquer x ∈ E. Então, atendendo
à definição de transformação linear e de novo à igualdade anterior, tem-se
T (0E ) = T (0IKx) = 0IKT (x) = 0F .
A propriedade (b) é consequência de −x = (−1)x. De facto, daqui segue-se que
T (−x) = T [(−1)x] = (−1)T (x) = −T (x),
atendendo à definição de transformação linear.
Quanto à propriedade (c) tem-se, atendendo a que x−y = x+(−y), à definição de transformação
linear e à propriedade (b):
T (x − y) = T [x + (−y )] = T (x) + T (−
y ) = T (x) − T (y ).
Deixa-se a demonstração de (d) como exercício.
4
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Exemplo 1.3 Considere-se
T :
→ IR2
IR2
(x1 , x2 ) → T (x1 , x2 ) = (x2 , x1 ).
Para verificar que é uma transformação linear realizam-se os seguintes passos:
1. Sejam x = (x1 , x2 ) e y = (y1 , y2 ) dois quaisquer vectores de IR2 . Então,
T (x + y) = T [(x1 , x2 ) + (y1 , y2 )] = T (x1 + y1 , x2 + y2 ) = (x2 + y2 , x1 + y1 )
= (x2 , x1 ) + (y2 , y1 ) = T (x1 , x2 ) + T (y1 , y2 ) = T (x) + T (y ),
sendo a 2a e 3a igualdades devidas à operação de adição de vectores e as restantes justificadas
pelas definições de x, y e T . Deste modo, verifica-se a primeira condição da definição 1.1.
2. Sejam x = (x1 , x2 ) ∈ IR2 e λ ∈ IR. Então,
T (λx) = T [λ(x1 , x2 )] = T (λx1 , λx2 )
= (λx2 , λx1 ) = λ(x2 , x1 ) = λT (x1 , x2 ) = λT (x),
sendo as igualdades justificadas exactamente como no procedimento anterior, ficando assim
satisfeita a segunda condição da definição 1.1.
x1
Q ≡ T ( x ) = ( x2 , x1 )
P ≡ x = ( x1 , x2 )
x2
x2
x1
Figura 3: Reflexão.
Para interpretar geometricamente a transformação T observe-se a figura 3 que sugere a simetria
dos vectores (x1 , x2 ) e (x2 , x1 ) relativamente à bissectriz dos quadrantes ímpares. Sejam P e Q as
extremidades dos vectores (x
1 , x2 ) e (x2 , x1 ), respectivamente. O ponto médio do segmento [P Q]
2 x1 +x2
pertencendo, portanto, à referida bissectriz. Simultaneamente, [P Q]
,
tem a forma x1 +x
2
2
é perpendicular a esta recta, pois sendo
−
−→
P Q = T (x1 , x2 ) − (x1 , x2 ) = (x2 − x1 , x1 − x2 )
e (1, 1) um vector com a direcção daquela bissectriz, tem-se
−−→
P Q|(1, 1) = (x2 − x1 , x1 − x2 )| (1, 1) = 0.
Assim, é natural dizer que T é uma reflexão.
Vejamos agora se, à semelhança da transformação rotação, é possível representar matricialmente
a reflexão T . A resposta é afirmativa pois:
5
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
1. O vector (x1 , x2 ) pode escreve-se na forma
3.
(x1 , x2 ) = x1 (1, 0) + x2 (0, 1)
donde, pela alínea (d) da proposição 1.1,
T (x1 , x2 ) = x1 T (1, 0) + x2 T (0, 1),
(3)
ou seja,
(x2 , x1 ) = x1 (0, 1) + x2 (1, 0).
2. Esta igualdade escreve-se matricialmente na forma
0
1
x2
= x1
+ x2
,
x1
1
0
pelo que equivale ao seguinte produto matricial:
x2
0 1
x1
=
.
x2
x1
1 0
0 1
permite definir alternativamente a reflexão T por
Assim, a matriz AT =
1 0
T (x) = AT x, ∀x ∈ IR2 .
Supondo fixada em IR2 a base canónica e1 = (1, 0) e e2 = (0, 1), da igualdade (3) conclui-se
que as colunas da matriz AT são, respectivamente, as imagens de e1 e e2 por meio de T expressas
naquela base. Efectivamente, tem-se T (e1 ) = (0, 1) = e2 e T (e2 ) = (1, 0) = e1 , pelo que a 1a coluna
de AT contém as coordenadas de e2 e, a 2a coluna, as coordenadas de e1 . A matriz AT diz-se a
matriz representativa de T relativamente à base fixada em IR2 .
Exemplo 1.4 Seja T : IR3 → IR2 a função dada por
T (x1 , x2 , x3 ) = (x1 , x3 ).
Para verificar que T é linear sejam (x1 , x2 , x3 ) e (y1 , y2 , y3 ) quaisquer vectores de IR3 e λ ∈ IR.
Então, de forma análoga à do exemplo 1.3, tem-se
T [(x1 , x2 , x3 ) + (y1 , y2 , y3 )] = T (x1 + y1 , x2 + y2 , x3 + y3 )
= (x1 + y1 , x3 + y3 ) = (x1 , x3 ) + (y1 , y3 )
= T (x1 , x2 , x3 ) + T (y1 , y2 , y3 ).
e
T [λ(x1 , x2 , x3 )] = T (λx1 , λx2 , λx3 )
= (λx1 , λx3 ) = λ(x1 , x3 )
= λT (x1 , x2 , x3 ).
Supondo fixadas em IR3 e IR2 as respectivas bases canónicas, tal como foi sugerido no exemplo
anterior e será provado no teorema 1.1, para obter a representação matricial de T bastará calcular
T (e1 ) = T (1, 0, 0) = (1, 0), T (e2 ) = T (0, 1, 0) = (0, 0) e T (e3 ) = T (0, 0,1) = (0, 1) e considerar a
1 0 0
matriz de tipo 2×3 formada por estas imagens, isto é, AT =
. De facto, para qualquer
0 0 1
x = (x1 , x2 , x3 ) , verifica-se que T (x) = AT x pois
x
0 0 0 1
x1
x2 =
AT x =
.
1 0 1
x3
x3
6
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Exemplo 1.5 Considere-se a transformação T : IRn → IRn tal que T (x) = c x, onde c é uma constante real. Trata-se de uma transformação linear que, no caso de c = 0, se diz a transformação
nula de IRn em IRn e é representada matricialmente pela matriz nula. Caso c = 1, obtém-se a
transformação identidade em IRn , que é representada matricialmente pela matriz identidade
de ordem n, In , visto que T (x) = x ⇔ T (x) = Inx.
Exemplo 1.6 Seja Pn o espaço vectorial dos polinómios de grau menor ou igual a n e Sn =
{1, x, x2 , . . . , xn } a sua base canónica. Considere-se, em particular, a transformação D : P3 → P3
(designada por operador de derivação) que a cada polinómio
p(x) = a0 + a1 x + a2 x2 + a3 x3 ∈ P3
faz corresponder a sua derivada
D(p) =
dp
(x) = a1 + 2a2 x + 3a3 x2 ∈ P3 .
dx
D é uma transformação linear pois, dados p(x) = a0 +a1 x+a2 x2 +a3 x3 , q(x) = b0 +b1 x+b2 x2 +b3 x3
e λ escalar, tem-se
D(p + q) = D(p) + D(q)
e
D(λp) = λD(p).
De facto, estas igualdades deduzem-se com facilidade, atendendo a que a derivada da soma é a
soma das derivadas e que a derivada do produto de uma constante por uma função é o produto da
constante pela derivada da função.
Para obter a matriz representativa de D, vamos exprimir na base S3 = {1, x, x2 , x3 } as imagens
dos elementos de S3 por meio de D. Tem-se então
D(1) = 0 = 0 × 1 + 0 × x + 0 × x2 + 0 × x3 ,
D(x) = 1 = 1 × 1 + 0 × x + 0 × x2 + 0 × x3 ,
D(x2 ) = 2x = 0 × 1 + 2 × x + 0 × x2 + 0 × x3 ,
D(x3 ) = 3x2 = 0 × 1 + 0 × x + 3x2 + 0 × x3
e, portanto, D pode ser representada matricialmente por
0 1 0 0
0 0 2 0
AD =
0 0 0 3
0 0 0 0
.
A matriz representativa de D comporta toda a informação que é essencial para determinar os
coeficientes da derivada de qualquer polinómio de P3 e, consequentemente, essa mesma derivada.
De facto, obtêm-se os coeficientes da derivada dum polinómio p(x) = a0 + a1 x + a2 x2 + a3 x3
multiplicando a matriz AD pelos coeficientes de p(x) :
a0
0 1 0 0
a1
a0
a1 0 0 2 0 a1 2a2
AD
a2 = 0 0 0 3 a2 = 3a3 .
a3
a3
0
0 0 0 0
Vimos, no exemplo 1.1 acima, que qualquer matriz de elementos reais define uma transformação linear. Nos restantes exemplos, mesmo quando as transformações lineares não foram dadas
matricialmente, foram determinadas matrizes representativas. A questão que naturalmente se põe,
é a de saber se qualquer transformação linear de um espaço vectorial para outro tem uma representação matricial. A resposta é afirmativa no caso dos espaços vectoriais de dimensão finita como
se mostra no resultado seguinte.
7
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Teorema 1.1 Sejam E e F espaços vectoriais de dimensão finita. Suponham-se fixadas em E e
em F as bases ordenadas2 {e1 , e2 , . . . , en } e {f1 , f2 , . . . , fm }, respectivamente, e seja T : E → F
uma transformação linear.
Então, a imagem y = T (x) ∈ F de qualquer vector x ∈ E obtém-se por
x1
y1
x2
y2
y = Ax ⇔ . = A . ,
..
..
ym
xn
em que:
• A é uma matriz do tipo m × n e as suas colunas são, respectivamente, as coordenadas dos
vectores T (e1 ), T (e2 ), . . . , T (en ) relativamente à base {f1 , f2 , ..., fm } de F ;
• x1 , x2 , . . . , xn são as coordenadas de x relativamente à base fixada em E, isto é, x = x1e1 +
x2e2 + · · · + xnen ;
• y1 , y2 , . . . , ym são as coordenadas de y relativamente à base fixada em F , isto é, y = y1 f1 +
y2 f2 + · · · + ym fm .
A matriz A é única e diz-se a matriz representativa de T relativamente às bases fixadas
em E e em F .
Demonstração Dado que T é uma transformação linear tem-se
T (x) = T (x1e1 + x2e2 + · · · + xnen )
= x1 T (e1 ) + x2 T (e2 ) + · · · + xn T (en ),
(4)
ou seja, T (x) é uma combinação linear das imagens dos vectores da base {e1 , e2 , . . . , en } de E.
Ora, estas imagens representam-se na base {f1 , f2 , . . . , fm } de F por
T (ei ) = a1i f1 + a2i f2 + · · · + ami fm ,
ou matricialmente por
T (ei ) =
a1i
a2i
..
.
∀i = 1, . . . n
.
ami
Então, por (4), T (x) pode escrever-se na forma
a11
a12
a1n
a21
a22
a2n
T (x) = x1 . + x2 . + · · · + xn .
..
..
..
am1
am2
amn
a11 x1 + a12 x2 + · · · + a1n xn
a21 x1 + a22 x2 + · · · + a2n xn
=
.
..
.
(5)
am1 x1 + am2 x2 + · · · + amn xn
2 Suporemos
aqui que os vectores das bases de E e F obedecem a uma ordenação pré-fixada.
8
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Note-se que as linhas desta última matriz
{f1 , f2 , . . . , fm } inicialmente fixada em F .
y1 , y2 , . . . , ym , obtém-se de (5)
a11
y1
y2 a21
.. = ..
. .
ym
am1
são exactamente as coordenadas de T (x) na base
Designando T (x) por y e aquelas coordenadas por
a12
a22
..
.
···
···
..
.
am2
· · · amn
a1n
a2n
..
.
x1
x2
..
.
,
xn
ou seja, y = Ax em que A designa, como se enunciou, a matriz cujas colunas são as imagens por
meio de T dos vectores da base fixada em E. Visto que estas imagens se escrevem de maneira
única em função dos vectores da base de F , conclui-se que A é a única matriz que representa T
nas bases ordenadas fixadas em E e F .
Exemplo 1.7 Seja T : R3 → R2 a transformação definida por T (x1 , x2 , x3 ) = (x2 , x1 + x3 ) e
suponha-se fixada em IR3 a base canónica {e1 , e2 , e3 } = {(1, 0, 0), (0, 1, 0), (0, 0, 1)} e em IR2 a base
{f1 , f2 } = {(1, 0), (1, 1)}. Para obter a matriz representativa de T há que sucessivamente calcular:
T (e1 ) = T (1, 0, 0) = (0, 1) = −1f1 + 1f2 ;
T (e2 ) = T (0, 1, 0) = (1, 0) = 1f1 + 0f2 ;
T (e3 ) = T (0, 0, 1) = (0, 1) = −1f1 + 1f2 .
Dispondo nas colunas de uma matriz as coordenadas de T (e1 ), T (e2 ) e T (e3 ) na base {f1 , f2 },
obtém-se a matriz que representa T nas bases fixadas:
−1 1 −1
.
1 0
1
Por outro lado, se em IR2 a base fixada tivesse sido a base canónica formada pelos vectores
e1 = (1, 0) e , e2 = (0, 1), a transformação T seria representada pela matriz
0 1 0
,
1 0 1
pois T (e1 ) = e2 , T (e2 ) = e1 e T (e3 ) = e2 .
Exemplo 1.8 Suponha-se de novo a reflexão T : IR2 → IR2 dada por T (x1 , x2 ) = (x2 , x1 ). Ora já
se viu que estando fixada em IR2 a base canónica, a matriz que representa T é
0 1
,
1 0
pois T (e1 ) = T (1, 0) = (0, 1) = e2 e T (e2 ) = e1 . Suponha-se, por outro lado, fixada em IR2 a base
{f1 , f2 } com f1 = (1, 1) e f2 = (−1, 1). Para obter a matriz de T na nova base há que determinar
T (f1 ) e T (f2 ) e exprimir estes vectores naquela base. Então, como
T (f1 ) = T (1, 1) = (1, 1) = 1f1 + 0f2 e
T (f2 ) = T (−1, 1) = (1, −1) = 0f1 − 1f2 ,
tem-se que a representação matricial de T na base {f1 , f2 } é
9
1 0
0 −1
.
.
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
1.1
A Composição de Transformações Lineares e o Produto Matricial
Consideremos agora duas transformações lineares T : E → F e S : F → G entre espaços vectoriais
de dimensão finita. A composição de S com T é a transformação S ◦ T definida por
(S ◦ T ) (x) = S (T (x)) ,
∀x ∈ E.
Vimos no teorema anterior que a cada transformação linear está associada a matriz que a representa relativamente às bases consideradas. Observemos agora que a composição de transformações
lineares está associada ao produto das matrizes que representam aquelas transformações nas bases
consideradas.
Proposição 1.2 Sejam E, F e G espaços vectoriais sobre o mesmo corpo e designemos respectivamente por AT e AS as matrizes que representam as transformações lineares T : E → F e
S : F → G relativamente a bases fixadas em E, F e G. Então, a matriz AS◦T que representa S ◦ T,
relativamente às mesmas bases, é o produto de AS por AT , isto é, AS◦T = AS AT .
Demonstração Provemos primeiro que S ◦ T é uma transformação linear. Com efeito, para
quaisquer x, y ∈ E tem-se
(S ◦ T ) (x + y ) = S (T (x + y)) = S (T (x) + T (
y ))
= S (T (x)) + S (T (
y )) = (S ◦ T ) (x) + (S ◦ T ) (
y ).
Por outro lado, para qualquer x ∈ E e todos os escalares λ tem-se
(S ◦ T ) (λx) = S (T (λx)) = S (λT (x)) = λS (T (x)) = λ (S ◦ T ) (x),
e, portanto, S ◦ T é uma transformação linear.
Considerando fixadas bases em E, F e G, tem-se, atendendo à definição de S ◦ T e ao teorema
anterior:
(S ◦ T ) (x) = S (T (x)) = S (AT x) = AS AT x, ∀x ∈ E.
Visto que a representação matricial de uma transformação linear é única, resulta destas igualdades
que AS◦T = AS AT , tendo em conta que S ◦ T é linear.
Exemplo 1.9 Consideremos duas transformações lineares T : IR2 → IR3 e S : IR3 → IR2 representadas, relativamente às bases canónicas de IR2 e IR3 , por
0 1
2 0 1
AT = 0 1 e AS =
.
1 1 0
1 1
Tem-se então que a matriz representativa de S ◦ T : IR2 → IR2 é dada por
0 1
2 0 1
1 3
AS◦T = AS AT =
0 1 =
.
1 1 0
0 2
1 1
Consequentemente, (S ◦ T ) (x1 , x2 ) = (x1 + 3x2 , 2x2 ).
Por outro lado, a matriz representativa de T ◦ S : IR3 → IR3 é
0 1 1 1 0
2
0
1
AT ◦S = AT AS = 0 1
= 1 1 0 ,
1 1 0
1 1
3 1 1
donde (T ◦ S) (x1 , x2 , x3 ) = (x1 + x2 , x1 + x2 , 3x1 + x2 + x3 ).
10
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
1.2
Mudança de Base
Seja T : E → E um endomorfismo do espaço vectorial E de dimensão finita. Quando neste espaço se
efectua uma mudança de base, cada vector de E passa a ser representado por coordenadas distintas
das iniciais. Estamos agora interessados em estudar a alteração provocada por uma mudança de
base na matriz representativa do endomorfismo T . Comecemos com um exemplo ilustrativo.
Exemplo 1.10 Seja E um espaço vectorial de base {e1 , e2 , e3 } e T : E → E uma transformação
linear cuja representação relativamente à base indicada é
−1
0 −2
0
1 .
A= 0
0 −1
0
Considerando o sistema de vectores {f1 , f2 , f3 }, em que
f1 = e1 + e2
f2 = −e1 − e3 ,
f = e + 2e
3
1
3
(6)
pretende-se:
(a) Mostrar que {f1 , f2 , f3 } é uma nova base de E.
(b) Determinar a matriz associada a T na nova base.
Para ver (a) basta verificar que f1 , f2 e f3 são linearmente independentes. Ora, λ1 f1 + λ2 f2 +
λ3 f3 = 0E equivale a
λ1 (e1 + e2 ) + λ2 (−e1 − e3 ) + λ3 (e1 + 2e3 ) = 0E
(λ1 − λ2 + λ3 )e1 + λ1e2 + (−λ2 + 2λ3 )e3 = 0E .
Como e1 , e2 e e3 são linearmente independentes, a última igualdade equivale a
λ1 = 0
λ1 − λ2 + λ3 = 0
λ1 = 0
λ2 = 0 ,
⇔
−λ2 + 2λ3 = 0
λ3 = 0
pelo que f1 , f2 e f3 são linearmente independentes.
Passemos à resolução de (b). Como
T (f1 ) = T (e1 + e2 ) = (−1, 0, −1),
T (f2 ) = T (−e1 − e3 ) = (3, −1, 0) e
T (f3 ) = T (e1 + 2e3 ) = (−5, 2, 0),
as expressões de T (f1 ), T (f2 ) e T (f3 ) na base {f1 , f2 , f3 } obtêm-se por:
λ1 = 0
λ1 − λ2 + λ3 = −1
λ1 = 0
λ2 = 1 ,
⇒
λ1 f1 + λ2 f2 + λ3 f3 = (−1, 0, −1) ⇔
−λ2 + 2λ3 = −1
λ3 = 0
λ1 = −1
λ1 − λ2 + λ3 = 3
λ1 = −1
λ2 = −4
λ1 f1 + λ2 f2 + λ3 f3 = (3, −1, 0) ⇔
⇒
−λ2 + 2λ3 = 0
λ3 = −8
e
λ1 = 2
λ1 − λ2 + λ3 = −5
λ1 = 2
λ2 = 14 .
λ1 f1 + λ2 f2 + λ3 f3 = (−5, 2, 0) ⇔
⇒
−λ2 + 2λ3 = 0
λ3 = 7
11
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Consequentemente, a matriz associada a T
0
B= 1
0
na nova base é
−1 2
−4 14 .
−8 7
Podemos agora perguntar se existe alguma relação entre entre as matrizes A e B do exemplo
anterior. Efectivamente, A e B são matrizes semelhantes, isto é, existe uma matriz P, invertível,
tal que B = P −1 AP.
Antes de justificar esta afirmação, vejamos como pode P ser obtida. Considerando as igualdades
(6) dadas no enunciado para relacionar as bases {f1 , f2 , f3 } e {e1 , e2 , e3 }, podemos escrever
1 −1 1
(7)
[ f1 f2 f3 ] = [ e1 e2 e3 ] 1 0 0 .
0 −1 2
A mencionada matriz P é precisamente a matriz
diz-se a matriz de mudança de base, isto é,
1
P = 1
0
que se encontra mais à direita nesta igualdade e
−1 1
0 0
−1 2
Note-se que a matriz P é invertível. Com efeito, as 1a , 2a e 3a colunas de P são formadas,
respectivamente, pelas coordenadas de f1 , f2 e f3 na base {e1 , e2 , e3 }. Deste modo, as colunas de
P são linearmente independentes se e só se f1 , f2 e f3 também o forem. Dado que estes vectores
são linearmente independentes, conclui-se que o mesmo acontece com as colunas de P , pelo que
esta matriz é invertível.
Além disto, supondo que x se exprime na base {e1 , e2 , e3 } por x = x1e1 + x2e2 + x3e3 , podemos
escrever esta igualdade na forma matricial do seguinte modo:
x1
x = e1 e2 e3 x2 .
x3
Logo, por (7), concluimos que
x =
f2
f1
ou, mais sucintamente,
x =
f1
f3
f2
x1
P −1 x2 = f1
x3
f3
P −1 X =
f1
f2
f2
f3
f3
x1
x2
x3
X,
onde X e X designam as matrizes coluna correspondentes às coordenadas de x nas bases {e1 , e2 , e3 }
e {f1 , f2 , f3 }, respectivamente. Deduz-se assim que
X = P −1 X ⇔ X = P X ,
(8)
exprimindo estas igualdades a relação existente entre as coordenadas de x em cada uma daquelas
bases.
Generalizando para vectores com um qualquer número finito de coordenadas, podemos enunciar:
Proposição 1.3 Se {e1 , . . . , en } e {f1 , . . . , fn } são duas bases de um espaço vectorial de dimensão
finita e P é a matriz de mudança de base, então as matrizes coluna X e X , que representam um
mesmo vector x em cada uma das bases, estão relacionadas por X = P X .
12
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Passamos agora a justificar o que afirmámos atrás: as matrizes A e B do exemplo 1.10 são
semelhantes.
Supondo fixada em E a base {e1 , e2 , e3 }, a transformação T pode escrever-se matricialmente
na forma
Y = AX,
(9)
onde X é a matriz coluna que representa, naquela base, um dado vector x ∈ E e Y representa a
correspondente imagem, na mesma base. Se a base de E passar a ser {f1 , f2 , f3 }, a transformação
T passar-se-á a representar por
(10)
Y = BX ,
onde X e Y são, respectivamente, as expressões de X e Y na nova base. Sendo P a matriz de
mudança de base temos, por (8), que Y = P −1 Y e X = P X . Utilizando estas igualdades e (9),
obtemos
Y = P −1 Y = P −1 AX = P −1 AP X .
Comparando esta expressão com (10), conclui-se que
B = P −1 AP,
isto é, as matrizes que representam T nas bases {f1 , f2 , f3 } e {e1 , e2 , e3 } são semelhantes.
No caso do exemplo 1.10, o leitor pode facilmente verificar que a inversa da matriz de mudança
de base P obtida em (7) é
0 1 0
P −1 = −2 2 1
−1 1 1
e que P −1 AP = B.
Todas as deduções feitas são evidentemente válidas num espaço vectorial de dimensão finita,
pelo que podemos enunciar:
Proposição 1.4 Seja E um espaço vectorial de dimensão finita. Um endomorfismo T : E → E é
representado em bases diferentes por matrizes semelhantes.
2
Núcleo e Imagem de uma Transformação Linear
Seja T : E → F uma transformação linear. Associados a T consideram-se habitualmente dois
subconjuntos, um do espaço vectorial de partida, E, e o outro do espaço vectorial de chegada, F .
O primeiro é o conjunto do vectores de E que são aplicados no vector nulo 0F de F , designado
por espaço nulo de T ou núcleo de T e representado habitualmente por Nuc(T ) (ou Ker(T )3 ).
Tem-se assim,
Nuc(T ) = x ∈ E : T (x) = 0F .
O segundo subconjunto mencionado, é o conjunto das imagens de E por meio de T , designa-se
por imagem de T ou contradomínio de T , representa-se por T (E) e, formalmente, é dado por
T (E) = {T (x) ∈ F : x ∈ E} = {y ∈ F : ∃x ∈ E : y = T (x)}.
Sendo A a matriz representativa de T, é imediato verificar que Nuc(T ) coincide com o espaço nulo
da matriz A e que T (E) não é mais do que o espaço das colunas da mesma matriz (recordem-se as
secções 4.5 e 4.6 do volume I. Consequentemente, o seguinte resultado é válido:
Proposição 2.1 Seja T : E → F uma transformação linear. Então, o núcleo de T e a imagem
de T são subespaços vectoriais de E e F , respectivamente.
3 Abreviatura
da palavra inglesa kernel.
13
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Exemplo 2.1 Considere-se a transformação linear T : IR3 → IR2 definida por
T (x1 , x2 , x3 ) = (x2 , x1 + x3 ).
Tem-se
Nuc(T ) = {(x1 , x2 , x3 ) ∈ IR3 : T (x1 , x2 , x3 ) = (0, 0)}
= {(x1 , x2 , x3 ) ∈ IR3 : (x2 , x1 + x3 ) = (0, 0)},
donde os vectores do núcleo de T verificam o sistema de equações
x2 = 0
x2 = 0
.
⇔
x1 + x3 = 0
x1 = −x3
Assim, Nuc(T ) é constituído pelos vectores de IR3 da forma (−x3 , 0, x3 ) = x3 (−1, 0, 1), ou seja,
Nuc(T ) = (−1, 0, 1).
Para obter
T (IR3 ) = {(y1 , y2 ) ∈ IR2 : ∃(x1 , x2 , x3 ) : T (x1 , x2 , x3 ) = (y1 , y2 )}
basta ver para que vectores (y1 , y2 ) ∈ IR2 é possível o sistema
x2 = y1
.
T (x1 , x2 , x3 ) = (y1 , y2 ) ⇔
x1 + x3 = y2
Escrevendo a matriz ampliada deste sistema e calculando a respectiva característica (para o que é
suficiente efectuar uma troca de linhas) obtém-se
1 0 1 | y2
0 1 0 | y1
−→
.
1 0 1 | y2
0 1 0 | y1
Como a característica da matriz dos coeficientes iguala a da matriz ampliada, conclui-se que o
sistema é sempre possível, qualquer que seja o vector (y1 , y2 ) ∈ IR2 . Consequentemente, T (IR3 ) =
IR2 . Finalmente, o conjunto {(0, 1), (1, 0)} constitui uma base de T (IR3 ), visto que é formado pelas
colunas da matriz representativa de T homólogas das que contêm os redutores da matriz em escada.
Observe-se que no exemplo anterior é válida a igualdade
dim Nuc(T ) + dim T (IR3 ) = 1 + 2 = dim IR3 ,
isto é, a soma das dimensões do núcleo de T e da imagem de T iguala a dimensão do espaço de
partida. O resultado seguinte estabelece que aquela igualdade é válida em geral.
Teorema 2.1 Seja E um espaço vectorial de dimensão finita e T : E → F uma transformação
linear. Então,
dim Nuc(T ) + dim T (E) = dim E.
Demonstração Seja n = dim E e e1 , . . . , ek uma base para Nuc(T ), donde k = dim Nuc(T ) ≤ n.
Pelo teorema 2.4 (pág. 59) de [4], aqueles elementos são parte de uma certa base de E, por exemplo,
e1 , . . . , ek , ek+1 , . . . , ek+r
(11)
onde k + r = n. Vamos demonstrar que os r elementos
T (ek+1 ), . . . , T (ek+r )
14
(12)
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
formam uma base de T (E). Ficará assim demonstrado que dim T (E) = r e visto que k + r = n,
fica igualmente provado o teorema.
Vejamos primeiro que os r elementos (12) geram T (E). Para tal, seja y ∈ T (E). Então, existe
x ∈ E tal que y = T (x). Dado que
x = λ1e1 + · · · + λkek + λk+1ek+1 + · · · + λk+rek+r ,
tem-se
y = T (x) =
k
k+r
λi T (ei ) +
i=1
λi T (ei ) =
i=k+1
k+r
λi T (ei ),
i=k+1
atendendo a que T é uma transformação linear e ao facto de T (e1 ) = · · · = T (ek ) = 0F. Isto prova
que os r elementos de (12) geram T (E).
Provemos finalmente a independência linear destes vectores. Suponhamos que existem escalares
λk+1 , . . . , λk+r tais que
k+r
λi T (ei ) = 0F .
i=k+1
Então, pela linearidade de T,
T
k+r
λiei
= 0F
i=k+1
pelo que o vector x = λk+1ek+1 + · · · + λk+rek+r ∈ Nuc(T ). Logo, existem escalares λ1 , . . . , λk tais
que x = λ1e1 + · · · + λkek e, portanto,
x − x =
k
k+r
λiei −
i=1
λiei = 0E .
i=k+1
Dado que os vectores (11) são linearmente independentes, os escalares λi , i = 1, . . . , k +r, são nulos
e, assim, os r elementos considerados em (12) são linearmente independentes.
Exercício 2.1 Supondo fixada em IR3 a base canónica, determinar o núcleo e a imagem da transformação linear T : IR3 → IR3 definida por T (x1 , x2 , x3 ) = (−2x1 , x2 + x3 , x1 ).
Resolução Bastará determinar os espaços nulo e das colunas da matriz representativa de T . Esta
última é a matriz
−2 0 0
A = 0 1 1 ,
1 0 0
pois T (1, 0, 0) = (−2, 0, 1), T (0, 1, 0) = (0, 1, 0) e T (0, 0, 1) = (0, 1, 0). Para obter o espaço nulo é
necessário resolver o sistema Ax = 0, procedendo-se como segue:
−2 0 0 | 0
−2 0 0 | 0
0 1 1 | 0
0 1 1 | 0
−→
1
L
+
L
1 0 0 | 0
0 0 0 | 0
1
3
2
1 0 0 | 0
1
− 2 L1
0 1 1 | 0 .
−→
0 0 0 | 0
Assim, Ax = 0 é quivalente a
x1 = 0
⇔
x2 + x3 = 0
15
x1 = 0
,
x2 = −x3
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
donde Nuc(T ) = {(0, −x3 , x3 ) : x3 ∈ IR} = (0, −1, 1) .
Para obter o espaço imagem T (IR3 ) é necessário determinar os vectores y = (y1 , y2 , y3 ), para
os quais o sistema Ax = y é possível, prodecendo-se do seguinte modo:
−2 0 0 |
y1
−2 0 0 | y1
0 1 1 |
.
0 1 1 | y2
y2
−→
1
1
1 0 0 | y3
L
+
L
0
0
0
|
y
+
y
3
3
2 1
2 1
Assim, aquele sistema é possível se e só se
1
y1 + y3 = 0 ⇔ y1 = −2y3 ,
2
donde os vectores de T (IR3 ) são da forma (−2y3 , y2 , y3 ) = y2 (0, 1, 0)+y3 (−2, 0, 1), ou seja, T (IR3 ) =
{(0, 1, 0), (−2, 0, 1)} . Visto que os vectores geradores de T (IR3 ) são linearmente independentes
tem-se dim T (IR3 ) = 2.
Como não podia deixar de ser, verifica-se que
dim Nuc(T ) + dim T (IR3 ) = dim IR3 .
3
Inversa de uma Transformação Linear
Considere-se a matriz
Aθ =
− sen θ
cos θ
cos θ
sen θ
.
Fixada a base canónica em IR2 , esta matriz define a transformação linear Tθ : IR2 → IR2 dada,
para cada (x1 , x2 ) ∈ IR2 , por
Tθ (x1 , x2 ) = (x1 cos θ − x2 sen θ, x1 sen θ + x2 cos θ).
Tθ pode ser interpretada geometricamente como uma rotação dos vectores do plano de θ radianos.
Com efeito, é fácil verificar analiticamente que θ é o ângulo formado pelo vector (x1 , x2 ) e pela sua
imagem Tθ (x1 , x2 ), o que justifica a interpretação geométrica dada (recorde-se a matriz (1) que foi
interpretada geometricamente como uma rotação de 90 ◦ no plano; trata-se de um caso particular
de Aθ visto que coincide com Aπ/2 ).
y
y = 1
y2
y 2 = x 1sen θ + x 2 cos θ
x2
θ
x
x = 1
x 2
−θ
y1 = x 1 sen θ − x 2 cos θ
x1
Figura 4: Rotação de θ rad e a sua inversa
Na figura 4, a imagem (y1 , y2 ) = T (x1 , x2 ) pode ser entendida como o resultado da rotação do
vector (x1 , x2 ). É natural portanto a pergunta: existe uma transformação “contrária” que reponha
16
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
a situação inicial, isto é, que permita obter (x1 , x2 ) a partir de (y1 , y2 )? Intuitivamente, conclui-se
de imediato que a transformação procurada é a rotação de −θ radianos. Esta transformação diz-se
a transformação inversa de Tθ e representa-se por Tθ−1 . Por analogia com Aθ , a matriz que a
define é dada por:
cos (−θ) − sen (−θ)
cos θ sen θ
=
.
A−θ =
sen (−θ)
cos (−θ)
− sen θ cos θ
Note-se que A−θ é a matriz inversa de Aθ , pois Aθ A−θ = I2 , como pode ser facilmente verificado.
Este facto revela o paralelismo existente entre a operação de inversão de matrizes e a operação de
inversão de transformações lineares.
Para melhor precisarmos as noções anteriores, consideremos a transformação linear
T : E → T (E) ⊆ F.
Diremos que T é uma transformação invertível se T é injectiva, isto é, se transforma elementos
distintos de E em elementos distintos de F. Equivale a afirmar que, para x, y ∈ E, se x = y então
T (x) = T (y ), ou, o que é o mesmo,
∀x, y ∈ E, T (x) = T (y ) ⇒ x = y.
Refira-se também que T : E → F é sobrejectiva se T (E) = F , pois, assim, qualquer elemento do
conjunto de chegada é imagem de um elemento do conjunto de partida. Uma tranformação linear
simultaneamente injectiva (monoformismo) e sobrejectiva (epimorfismo) é bijectiva (isomorfismo).
O resultado seguinte permite caracterizar as transformações invertíveis de diversas formas,
decorrendo daí o seu interesse.
Proposição 3.1 Sejam E e F espaços vectoriais de dimensão finita e T : E → T (E) ⊆ F uma
transformação linear. Então, as seguintes afirmações são equivalentes:
(a) T é invertível;
(b) A transformação inversa T −1 : T (E) ⊆ F → E definida por T −1 [T (x)] = x, ∀x ∈ E, é
uma transformação linear;
(c) Nuc(T ) = {0E }, isto é, o núcleo de T reduz-se ao vector nulo de E;
(d) T transforma vectores linearmente independentes de E em vectores linearmente independentes
de F , isto é, se v1 , v2 , . . . , vp são vectores linearmente independentes de E então T (v1 ), T (v2 ),
. . . , T (vp ) são vectores linearmente independentes de F .
Demonstração Provar-se-á sucessivamente (a)⇒ (b)⇒ (c)⇒ (d)⇒ (a).
(a) ⇒ (b) Em primeiro lugar, é necessário verificar que T −1 é uma aplicação. Com efeito, dado
u ∈ T (E), existe um e um só x ∈ E tal que T (x) = u. Isto porque, atendendo à injectividade
de T, é absurdo supor a existência de dois vectores x e y tais que x = y e T (x) = T (y) = u.
Por conseguinte, T −1 é uma aplicação.
Para verificar que T −1 é linear, sejam u, v ∈ T (E) e λ, µ escalares. Assim, existem x, y ∈ E
tais que u = T (x) e v = T (y ). Então,
T −1 (λu + µv) = T −1 (λT (x) + µT (y)) = T −1 (T (λx + µy))
= λx + µ
y = λT −1 (u) + µT −1 (v),
tendo em conta que T é linear e que T −1 (u) = T −1 [T (x)] = x e T −1 (v) = T −1 [T (y )] = y,
por definição de T −1 . Fica assim provado que T −1 é uma transformação linear.
17
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
(b) ⇒ (c) Seja x ∈ E tal que T (x) = 0F . Aplicando T −1 a ambos os membros, obtém-se
x = T −1 (0F ). Como por hipótese T −1 é uma transformação linear, tem-se
T −1 (0F ) = T −1 (0 · 0F ) = 0 · T −1 (0F ) = 0E ,
pelo que x = 0E . Consequentemente, Nuc(T ) = {0E }.
(c) ⇒ (d) Queremos provar que T (v1 ), T (v2 ), . . . , T (vp ) são linearmente independentes. Ora,
p
p
p
λi T (vi ) = 0F ⇒ T
λivi = 0F ⇒
λivi = 0E ,
i=1
i=1
i=1
pois Nuc(T ) = {0E }. Como, por hipótese, v1 , v2 , . . . , vp são linearmente independentes,
segue-se que λ1 , λ2 , . . . , λp = 0. Consequentemente, T (v1 ), T (v2 ), . . . , T (vp ) são linearmente
independentes.
(d) ⇒ (a) Há que provar que T é injectiva, isto é, que T (x) = T (y) ⇒ x = y, ∀x, y ∈ E. Dado
que T é de dimensão finita, pode supor-se, sem perda de generalidade, que {e1 , e2 , . . . , en } é
y = µ1e1 + µ2e2 + · · · + µnen
uma base de E. Então, sejam x = λ1e1 + λ2e2 + · · · + λnen e vectores de E tais que T (x) = T (y). Esta igualdade equivale a
n
n
T
λiei = T
µiei
i=1
i=1
ou ainda, tendo em conta que T é linear, a
n
(λi − µi ) T (ei ) = 0F .
(13)
i=1
Como e1 , e2 , . . . , en são linearmente independentes, resulta da hipótese que T (e1 ), T (e2 ), . . . ,
T (en ) são também independentes. Então, de (13) conclui-se que λ1 −µ1 , λ2 −µ2 , . . . , λn −µn ,
são todos nulos e, portanto, x = y, como se queria provar.
Por último, é estabelecido formalmente o paralelismo entre transformações inversas e matrizes
inversas.
Proposição 3.2 Sejam E e F espaços vectoriais da mesma dimensão e T : E → F uma transformação linear invertível representada matricialmente relativamente a certas bases de E e F pela
matriz quadrada AT . Então, T é bijectiva e a transformação inversa T −1 é representada matri−1
cialmente relativamente às referidas bases pela matriz inversa de AT , isto é, AT −1 = (AT ) .
Demonstração Sendo T injectiva tem-se que dim Nuc(T ) = 0E . Da igualdade dim Nuc(T )+
dim T (E) = n e do facto de F ter a mesma dimensão que E, resulta que T (E) = F . Assim, T é sobrejectiva e, portanto, bijectiva. Da proposição 3.1-(b) segue-se então que ambas as transformações
lineares compostas T −1 ◦ T e T ◦ T −1 são representadas pela matriz identidade In , pois
−1
T ◦ T (x) = T −1 [T (x)] = x = Inx, ∀x ∈ E
e
T ◦ T −1 (x) = T [T −1 (x)] = x = Inx, ∀x ∈ F.
Por outro lado, seja AT −1 a matriz quadrada que representa a transformação linear inversa
T −1 nas bases consideradas. Pela proposição 1.2, AT −1 ◦T = AT −1 AT e AT ◦T −1 = AT AT −1 donde,
AT −1 AT = AT AT −1 = In , ou seja, AT −1 é a matriz inversa de AT .
18
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Exemplo 3.1 Considere-se a transformação linear T
−1 1
AT = 1 1
0 1
: IR3 → IR3 cuja representação matricial é
0
1 ,
1
supondo fixada a base canónica em IR3
Pretende-se averiguar se T é bijectiva e, em caso afirmativo, obter a transformação inversa.
Para resolver a primeira das questões, é suficiente determinar o núcleo e a imagem de T . Com
efeito, para obter o núcleo efectuam-se as operações seguintes:
−1 1 0 | 0
−1 1 0 | 0
→
0 2 1 | 0
1 1 1 | 0
L1 + L2
0 1 1 | 0
0 1 1 | 0
−1 1 0 | 0
0 2 1 | 0 .
→
0 0 12 | 0
− 12 L2 + L3
Conclui-se então que o sistema homogéneo T (x1 , x2 , x3 ) = (0, 0, 0) é possível e determinado, o que
implica que Nuc(T ) = {(0, 0, 0)}, ou seja, T é injectiva.
Para obter o subespaço imagem T (IR3 ) efectuam-se os seguintes procedimentos:
−1 1 0 |
y1
−1 1 0 | y1
→
0 2 1 | y2 + y1
1 1 1 | y2
L1 + L2
0 1 1 | y3
0 1 1 |
y3
−1 1 0 |
y1
0 2 1 |
y 2 + y1 .
→
1
− 12 L2 + L3
0 0 12 | y3 − y2 +y
2
Assim, T (IR3 ) = IR3 pois o sistema é sempre possível, qualquer que seja y = (y1 , y2 , y3 ) ∈ IR3 .
Deste modo, T é sobrejectiva e, dado que é injectiva, é bijectiva. Aliás, este facto poderia ter sido
imediatamente concluido após a verificação da invertibilidade de T . Com efeito, sendo T invertível
e representada por uma matriz quadrada fica garantido, pela proposição 3.2, que T é bijectiva.
Finalmente, a determinação da transformação inversa T −1 pode, portanto, fazer-se calculando
a matriz inversa de AT , que é a matriz
0
1 −1
1
1 −1 .
−1 −1
2
Consequentemente, T −1 (x1 , x2 , x3 ) = (x1 − x2 , x1 + x2 − x3 , −x1 − x2 + 2x3 ), como facilmente se
verifica multiplicando (AT )−1 por (x1 , x2 , x3 ).
4
Exercícios Resolvidos
1 Verifique quais das aplicações são lineares (considere C como um espaço vectorial real):
(a) T :
→ IR2
IR3
(x1, x2 , x3 ) → T (x1 , x2 , x3 ) = (x1 , 2x1 + x2 )
(b) S :
C
→ IR4
z = x + yi → S(z) = S(x + yi) = (x, x + y, −y, x) ,
19
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
(c) ϕ :
IR2
→ IR3
(x1, x2 ) → ϕ(x1 , x2 ) = (x1 , x2 , k) ,
k constante real.
Resolução Em cada uma das alíneas vamos proceder à verificação das condições da definição
de transformação linear.
(1a) Verificação de 1: para quaisquer x = (x1 , x2 , x3 ) e y = (y1 , y2 , y3 ) de IR3 , tem-se
T (x + y) = T ((x1 , x2 , x3 ) + (y1 , y2 , y3 ))
= T (x1 + y1 , x2 + y2 , x3 + y3 )
= (x1 + y1 , 2(x1 + y1 ) + (x2 + y2 ))
= (x1 , 2x1 + x2 ) + (y1 , 2y1 + y2 )
= T (x1 , x2 , x3 ) + T (y1 , y2 , y3 )
= T (x) + T (
y ).
Verificação de 2: para quaisquer x = (x1 , x2 , x3 ) ∈ IR3 e λ ∈ IR, tem-se
T (λx) = T (λ(x1 , x2 , x3 )) = T (λx1 , λx2 , λx3 )
= (λx1 , 2λx1 + λx2 ) = λ(x1 , 2x1 + x2 )
= λT (x1 , x2 , x3 ) = λT (x).
Logo T é linear.
(1b)Verificação de 1: para quaisquer z1 = x1 + y1 i e z2 = x2 + y2 i de C, temos
S(z1 + z2 ) = S ((x1 + y1 i) + (x2 + y2 i)) = S ((x1 + x2 ) + (y1 + y2 )i)
= (x1 + x2 , x1 + x2 + y1 + y2 , −(y1 + y2 ), x1 + x2 )
= (x1 , x1 + y1 , −y1 , x1 ) + (x2 , x2 + y2 , −y2 , x2 )
= S(x1 + y1 i) + S(x2 + y2 ) = S(z1 ) + S(z2 ).
Verificação de 2: para quaisquer z = x + yi ∈ C e λ ∈ IR, temos
S(λz1 ) = S (λ(x1 + y1 i)) = S(λx1 + λy1 i)
= (λx1 , λx1 + λy1 , −λy1 , λx1 ) = λ(x1 , x1 + y1 , −y1 , x1 )
= λS(x1 + y1 i) = λS(z1 ).
Logo S é linear.
(1c) Dados x = (x1 , x2 ) e y = (y1 , y2 ) de IR2 , tem-se, por um lado,
ϕ(x + y ) = ϕ [(x1 , x2 ) + (y1 , y2 )]
= ϕ(x1 + y1 , x2 + y2 ) = (x1 + y1 , x2 + y2 , k);
por outro,
ϕ(x) + ϕ(y ) = ϕ(x1 , x2 ) + ϕ(y1 , y2 )
= (x1 , x2 , k) + (y1 , y2 , k) = (x1 + y1 , x2 + y2 , 2k).
Portanto ϕ verifica a condição 1 se e só se 2k = k ⇔ k = 0. Facilmente se vê também que
neste caso ϕ verifica a condição 2. Logo ϕ é linear se e só se k = 0.
3
2
2 Considere a transformação linear T : IR → IR definida por
T (x, y, z) = (3x + y − 2z, 2y + 2z) .
20
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
(a) Determine a matriz representativa de T supondo fixadas:
i. As bases canónicas tanto em IR3 como em IR2 ;
ii. A base {(1, 1, 1), (0, 1, 1), (0, 0, 1)} em IR3 e a base canónica em IR2 .
(b) Classifique T quanto à injectividade e sobrejectividade e indique uma base para Nuc(T )
e a dimensão de T (IR3 ).
Resolução
(a-i) Seja AT a matriz de T considerando fixadas em IR2 e IR3 a base canónica. As colunas de
AT são as coordenadas dos transformados T (1, 0, 0), T (0, 1, 0) e T (0, 0, 1) na base canónica
de IR2 . Como
T (1, 0, 0) = (3, 0) = 3(1, 0) + 0 (0, 1) ,
T (0, 1, 0) = (1, 2) = 1(1, 0) + 2 (0, 1) e
T (0, 0, 1) = (−2, 2) = −2(1, 0) + 2 (0, 1) ,
tem-se
AT =
3 1 −2
0 2
2
.
(a-ii) Seja BT a matriz de T supondo fixadas em IR3 a base {(1, 1, 1) , (0, 1, 1) , (0, 0, 1)} e em
IR2 a base canónica. As colunas de BT são as coordenadas dos transformados dos vectores
da base considerada em IR3 expressos na base canónica de IR2 . Como
T (1, 1, 1) = (2, 4) = 2(1, 0) + 4 (0, 1) ,
T (0, 1, 1) = (−1, 4) = −1(1, 0) + 4 (0, 1) e
T (0, 0, 1) = (−2, 2) = −2(1, 0) + 2 (0, 1) ,
conclui-se
BT =
2 −1 −2
4
4
2
.
(b) Vamos obter o núcleo de T :
Nuc(T ) = {(x, y, z) : T (x, y, z) = (0, 0)}.
Como
T (x, y, z) = (0, 0, 0) ⇔
3x + y − 2z = 0
⇔
2y + 2z = 0
x=z
,
y = −z
tem-se Nuc(T ) = {(z, −z, z) : z ∈ IR}. Assim, {(1, −1, 1)} constitui uma base para Nuc(T ) e
T não é injectiva, pois Nuc(T ) = {(0, 0, 0)}.
Vamos agora obter o subespaço imagem de T. Ora,
T (IR3 ) = {(a, b) ∈ IR2 : ∃(x, y, z) ∈ IR3 : T (x, y, z) = (a, b)}.
Para determinar os vectores (a, b) que tornam o sistema T (x, y, z) = (a, b) possível, vamos
transformar a respectiva matriz ampliada numa matriz em escada:
3x + y − 2z = a
3
1 −2 | a
T (x, y, z) = (a, b) ⇔
⇔
.
2y + 2z = b
0
2
2 | b
Conclui-se assim que o sistema é sempre possível qualquer que seja (a, b) ∈ IR2 , pelo que
T (IR3 ) = IR2 . Consequentemente, dim T (IR3 ) = 2 e T é sobrejectiva, uma vez que T (IR3 )
coincide com o conjunto de chegada.
21
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
3 Considere o espaço vectorial real M2 das matrizes reais de ordem 2 e o endomorfismo T :
M2 → M2 definido por
1 2
T (X) = XA, sendo A =
.
0 1
(a) Mostre que T é uma transformação linear.
(b) Determine a matriz representativa de T relativamente à base canónica de M2 :
1 0
0 1
0 0
0 0
, E2 =
, E3 =
, E4 =
.
E1 =
0 0
0 0
1 0
0 1
(c) Caracterize Nuc(T ) e T (M2 ). T é um automorfismo?
Resolução
(a) T é linear pois dadas quaisquer duas matrizes X, Y ∈ M2 e um escalar arbitrário λ ∈
IR, as propriedades da multiplicação de matrizes garantem que as seguintes igualdades são
verdadeiras:
T (X + Y ) = (X + Y ) A = XA + XB = T (X) + T (Y )
e
T (λX) = (λX) A = λ (XA) = λT (X).
(b) Efectuemos o cálculo das imagens
1 0
T (E1 ) =
0 0
0 1
T (E2 ) =
0 0
0 0
T (E3 ) =
1 0
0 0
T (E4 ) =
0 1
dos vectores da
1 2
=
0 1
1 2
=
0 1
1 2
=
0 1
1 2
=
0 1
Consequentemente, a matriz representativa de T
1 0 0
2 1 0
0 0 1
0 0 2
base canónica por meio de T :
1 2
= E1 + 2E2
0 0
0 1
= E2
0 0
0 0
= E3 + 2E4
1 2
0 0
= E4 .
0 1
na base considerada é
0
0
.
0
1
(c) O núcleo de T é definido por
Nuc(T ) = {X ∈ M2 : T (X) = O}.
Como
a b
1 2
0 0
T (X) = O ⇔ XA = O ⇔
=
c d
0 1
0 0
a 2a + b
0 0
⇔
=
c 2c + d
0 0
a=0
a=0
2a + b = 0
b=0
⇔
⇔
c
=
0
c=0
2c + d = 0
d=0
22
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
0 0
, isto é, o núcleo reduz-se ao vector nulo de M2 . Do
0 0
teorema 2.1 sai então que dim T (M2 ) = 4, pelo que T (M2 ) = M2 . Uma vez que T é injectiva
e sobrejectiva, T é bijectiva, tratando-se, portanto, de um isomorfismo. Como também é um
endomorfismo, conclui-se que T é um automorfismo.
conclui-se que Nuc(T ) =
4 Relativamente às bases canónicas, determine as matrizes das transformações lineares T ◦ ϕ e
ϕ ◦ T, em que T e ϕ estão definidas no exercício resolvido 1.
Resolução Visto que T (1, 0, 0) = (1, 2), T (0, 1, 0) = (0, 1) e T (0, 0, 1) = (0, 0), conclui-se
que a matriz representativa de T , AT , é dada por
1 0 0
AT =
2 1 0
Por outro lado, no caso da aplicação ϕ é obrigatório que k = 0, pelo que a respectiva matriz
representativa é
1 0
Aϕ = 0 1 .
0 0
Por conseguinte,
AT ◦ϕ = AT Aϕ =
1 0 0
2 1 0
1 0
0 1 = 1 0
2 1
0 0
e
Aϕ◦T
1 0 1 0 0
1
0
0
= Aϕ AT = 0 1
= 2 1 0 .
2 1 0
0 0
0 0 0
2
2
5 Considere a transformação linear Tµ : IR → IR (µ parâmetro real) cuja representação
matricial em relação à base canónica de IR2 é
0 1 − µ2
Aµ =
.
−4
5
(a) Determine os valores de µ para os quais Tµ é injectiva.
(b) Determine T1 (IR2 ) ⊕ V, onde V é o subespaço de IR2 representado geometricamente pelo
eixo dos xx.
(c) Diga qual a matriz que representa T2 relativamente à base {(1, 1), (−1, 0)} de IR2 .
Resolução
(a) Tµ é injectiva se e só se Nuc(Tµ ) = {0} o que equivale a dizer que a única solução do
sistema Aµ x = 0 é a solução nula. Isto equivale ainda a dizer que a característica de Aµ é 2,
ou seja,
0 1 − µ2 = 0 ⇔ 4 1 − µ2 = 0 ⇔ µ ∈
/ {−1, 1}.
det Aµ = 0 ⇔ −4
5
(b)
por calcular o subespaço T1 (IR2 ) para
o basta determinar quais os vectores
Comecemos
a
a
2
. Ora,
∈ IR que tornam possível o sistema A1 x =
b
b
0 0 | a
−4 5 | b
→
,
−4 5 | b
0 0 | a
23
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
donde o sistema é possível se e só se a = 0, tendo-se, pois, T1 (IR2 ) = (0, 1) (eixo dos
yy). Visto que V = (1, 0) (eixo dos xx), tem-se T1 (IR2 ) ∩ V = {0} e T1 (IR2 ) + V =
(0, 1) , (1, 0) = IR2 , donde T1 (IR2 ) ⊕ V = IR2 .
(c) A imagem de um vector genérico x = (x1 , x2 ) ∈ IR2 por meio de T2 é dada por
0 −3
x1
−3x2
T2 (x) = A2x =
=
.
−4
5
x2
−4x1 + 5x2
As colunas da matriz representativa de T2 relativamente à base {(1, 1), (−1, 0)} são as coordenadas de T2 (1, 1) = (−3, 1) e T2 (−1, 0) = (0, 4) nessa base. A expressão de T2 (1, 1) = (−3, 1)
na base {(1, 1), (−1, 0)} obtém-se resolvendo o sistema
γ 1 − γ 2 = −3
γ1 = 1
γ 1 (1, 1) + γ 2 (−1, 0) = (−3, 1) ⇔
⇔
.
γ1 = 1
γ2 = 4
Analogamente, para exprimir T2 (−1, 0) = (0, 4) na base {(1, 1), (−1, 0)} resolve-se
γ 1 − γ2 = 0
γ1 = 4
γ 1 (1, 1) + γ 2 (−1, 0) = (0, 4) ⇔
⇔
.
γ1 = 4
γ2 = 4
Assim, T2 é representada na base considerada pela matriz
1 4
.
4 4
3
3
6 Considere a tranformação linear T : IR → IR definida por T (x, y, z) = (2x, 4x − y, 3y − z).
(a) Determine a matriz representativa de T supondo fixadas em IR3 :
i. A base canónica;
ii. A base {(1, 0, 1), (0, 1, 0), (0, −1, 1)}.
(b) Mostre que as matrizes determinadas em (a) são semelhantes.
(c) Mostre que T é invertível e determine a sua inversa.
Resolução
(a-i) Seja {e1 , e2 , e3 } a base canónica de IR3 . Como T (1, 0, 0) = (2, 4, 0), T (0, 1, 0) = (0, −1, 3)
e T (0, 0, 1) = (0, 0, −1), tem-se
2
0
0
0 .
AT = T (1, 0, 0) T (0, 1, 0) T (0, 0, 1) = 4 −1
0
3 −1
(a-ii) Seja BT a matriz de T na base considerada. Designemos os elementos desta base por
f1 , f2 e f3 , respectivamente. As colunas de BT são as coordenadas dos transformados destes
vectores,
T (f1 ) = T (1, 0, 1) = (2, 4, −1),
T (f2 ) = T (0, 1, 0) = (0, −1, 3) e
T (f3 ) = T (0, −1, 1) = (0, 1, −4),
na mesma base. A expressão de T (f1 ) nesta base obtém-se de
µ1 = 2
µ1 = 2
µ2 − µ3 = 4
µ =1
⇔
.
µ1 f1 + µ2 f2 + µ3 f3 = (2, 4, −1) ⇔
2
µ1 + µ3 = −1
µ3 = −3
24
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
A expressão de T (f2 ) obtém-se de
µ1 = 0
µ1 = 0
µ2 − µ3 = −1 ⇔
µ =2 .
µ1 f1 + µ2 f2 + µ3 f3 = (0, −1, 3) ⇔
2
µ1 + µ3 = 3
µ3 = 3
Finalmente, a expressão de T (f3 ) na base considerada obtém-se de
µ1 = 0
µ1 = 0
µ2 − µ3 = 1
µ = −3 .
µ1 f1 + µ2 f2 + µ3 f3 = (0, 1, −4) ⇔
⇔
2
µ1 + µ3 = −4
µ3 = −4
Então,
BT =
T (f1 ) T (f2 ) T (f3 )
2 0
0
= 1 2 −3 .
−3 3 −4
(b) Pretende-se ver que AT e BT são matrizes semelhantes, isto é, que existe uma matriz
P, invertível, tal que B = P −1 AP. Continuando a representar respectivamente por f1 , f2 e
f3 os elementos da base {(1, 0, 1), (0, 1, 0), (0, −1, 1)}, tem-se que as relações entre esta base
e {e1 , e2 , e3 } são as seguintes,
f1 = e1 + e3
f2 = e2
f = −e + e
3
2
3
ou, matricialmente,
[ f1
f2
f3 ] = [ e1 e2
1 0
0
e3 ] 0 1 −1 .
1 0
1
Designando por P a matriz que se encontra mais à direita nesta igualdade, verifica-se que as
colunas de P são precisamente os vectores f1 , f2 e f3 . A matriz P é a matriz procurada pois,
P −1 AT P
−1
1 0
0
2
0
0
0
= 0 1 −1 4 −1
1 0
1
0
3 −1
1 0 0
2
0
0
1
= −1 1 1 4 −1
0 0
−1 0 1
0
3 −1
1
2 0
0
= 1 2 −3 = BT
−3 3 −4
1 0
0
0 1 −1
1 0
1
0
0
1 −1
0
1
(c) Uma transformação linear é invertível se o seu núcleo se reduz ao vector nulo. Ora
Nuc(T ) = (x, y, z) ∈ IR3 : T (x, y, z) = (0, 0, 0)
e como
2x = 0
x=0
4x − y = 0 ⇔
y=0 ,
T (x, y, z) = (0, 0, 0) ⇔
3y − z = 0
z=0
25
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
conclui-se que Nuc(T ) = {(0, 0, 0)}. Consequentemente, T é injectiva. Recordando a proposição 3.2, tem-se que a determinação de T −1 pode fazer-se calculando simplesmente a matriz
inversa de AT , que é a matriz
1
0
0
2
−1
AT = 2 −1 0 .
6 −3 −1
Assim,
5
1
x
2x
y =
.
T −1 (x, y, z) = A−1
2x − y
T
z
6x − 3y − z
Exercícios Propostos
1 Das aplicações a seguir definidas indique as que são transformações lineares:
(a) T : IR2 → IR2 dada por T (x, y) = (2x − y, x) .
(b) T : IR → IR2 dada por T (x) = (1, −3) .
(c) T : IR → IR2 dada por T (x) = (2x, x) .
(d) T : IR2 → IR3 dada por T (x, y) = (xy, y, x) .
(e) T : IR2 → IR3 dada por T (x, y) = (|x| , −y, 0) .
(f) T : P2 → P3 dada por T (p(x)) = p(0)x2 + Dp(0)x3 .
(g) T : P3 → P4 dada por T (p(x)) = 1 + xp(x).
(h) T : Mn → Mn dada por T (X) = XA − AX, onde A ∈ Mn e A = O.
(i) T : Mn → Mn dada por T (X) = (X + A)2 − (X + 2A) (X − 3A) , onde A ∈ Mn e
A = O.
2
3
2 Seja f : IR → IR uma transformação linear tal que f(1, 0) = (−1, 1, 2) e f (0, 1) = (3, 0, 1).
Determine f (x1 , x2 ) para qualquer (x1 , x2 ) ∈ IR2 , utilizando a definição de aplicação linear.
3 Qual a matriz da transformação linear do exercício 2, supondo fixadas:
(a) Em IR2 e IR3 as bases canónicas.
(b) Em IR2 a base canónica e em IR3 a base {(1, 0, 1), (1, 2, 1), (0, −1, 1)}
(c) Em IR2 a base {(−1, 1), (1, 1)} e em IR3 a base {(1, 0, 1), (1, 2, 1), (0, −1, 1)}.
3
2
4 Dada a transformação linear T : IR → IR tal que T (x, y, z) = (2x − y + z, 3x + y − 2z) e as
bases {(1, 1, 1), (0, 1, 1), (0, 0, 1)} e {(2, 1), (5, 3)} de IR3 e IR2 , respectivamente:
(a) Qual a matriz da transformação linear relativamente às bases canónicas?
(b) Qual a matriz da transformação linear relativamente às bases dadas?
(c) Se v = (3, −4, 2) (expresso na base canónica) qual o transformado nas bases dadas?
5 Considere a aplicação T : P2 → P2 dada por T (p(x)) = p(x + 1).
(a) Mostre que T é linear.
(b) Qual a matriz da transformação linear relativamente à base {1, x, x2 }?
26
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
6 Relativamente às bases canónicas, determine as matrizes das transformações lineares T ◦ f e
f ◦ T, em que T e f estão definidas nos exercícios 4 e 2, respectivamente.
3
2
7 Seja f : IR → IR tal que f (x, y, z) = (2x + y, x + y + z).
(a) Verifique que f é uma transformação linear.
(b) Determine uma base para Nuc(f ) e justifique que f não é injectiva.
(c) Caracterize f(IR3 ). Será f sobrejectiva? Justifique.
3
3
8 Considere a aplicação P : IR → IR definida por P (x, y, z) = (x, y, 0).
(a) Verifique que P é uma transformação linear e interprete-a geometricamente.
(b) Mostre que P 2 = P (P 2 = P ◦ P ).
(c) Determine Nuc(P ) e P (IR3 ). Situe esses espaços na interpretação geométrica anterior e
indique uma base para cada um deles.
3
3
9 Considere a aplicação linear ϕ : IR → IR dada pelas equações
ϕ(e1 ) = e1 + 2e2
ϕ(e2 ) = e1 + e3 ,
ϕ(e3 ) = e3
sendo {e1 , e2 , e3 } uma base de IR3 .
(a) Determine as dimensões de Nuc(ϕ) e ϕ(IR3 ).
(b) Verifique se o subespaço gerado por e2 , e3 é invariante para a aplicação dada. E e3 ?
3
3
10 Considere a aplicação T : IR → IR definida por T (x, y, z) = (u, v, w), em que
u=x−y+z
v = 5x + 2y − z
w = −3x − 4y + 3z
Determine bases para Nuc(T ) e T (IR3 ). Será T um automorfismo? Justifique.
11 Considere um espaço vectorial E de dimensão 3. Seja ϕ um endomorfismo de E cuja matriz
relativamente à base {e1 , e2 , e3 } é
−1
0 −2
0
4 .
Aϕ = 0
0 −1
0
(a) Mostre que ϕ é um automorfismo.
(b) Considere o conjunto de vectores {ē1 , ē2 , ē3 } tal que
ē1 = e1 + e2
ē2 = −e1 − e3
ē3 = e1 + 2e3 .
i. Verifique que se trata de uma nova base de E.
ii. Determine a matriz associada a ϕ na nova base.
iii. Determine as coordenadas do vector v = ae1 + be2 + ce3 na nova base.
27
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
3
4
12 Considere a aplicação linear Tλ : IR → IR cuja representação matricial em relação às bases
3
4
canónicas de IR e IR é dada pela matriz
1
4
5
4 −3
1
.
Aλ =
2
2
1 λ +2
4 −1
3
(a) Determine os valores de λ para os quais Tλ é injectiva.
(b) Determine o conjunto de elementos de IR3 cuja imagem por T1 é (6, 5, 5, 7) .
(c) Diga qual a matriz que representa a aplicação T1 relativamente às bases {(1, 1, 0),
(−1, 2, 1), (0, −1, 3)} de IR3 e à base canónica de IR4 .
1 0
2
3
13 Considere a aplicação linear T : IR → IR de matriz AT = 1 1 relativamente às bases
0 1
{e1 , e2 } e {f1 , f2 , f3 }. Sejam {e1 , e2 } e {f1 , f2 , f3 } novas bases fixadas em IR2 e IR3 tais que
f1 = f1 + 2f3
e1 = e1 + e2
.
e
f2 = f2
e2 = e1
f = −f ,
1
3
(a) Determine a matriz AT de T relativamente às novas bases.
(b) Determine na base {e1 , e2 } o original de v = 1 f1 + 3 f3 .
2
14 Considere a aplicação f : P2 → M2 dada por
2
f (c + bx + ax ) =
2
b+a c
b
a
.
(a) Mostre que f é linear.
(b) Determine a matriz representativa de f relativamente às bases {1, x, 1 + x2 } de P2 e
1 0
0 1
1 1
1 1
,
,
,
0 0
0 0
1 0
1 1
de M2 .
(c) Descreva os subespaços Nuc(f) e f(P2 ) e indique as respectivas dimensões.
3
3
15 Considere a aplicação linear T : IR → IR definida por T (x, y, z) = (2x, 4x − y, 2x + 3y − z).
Mostre que T é invertível e dertermine a sua inversa.
6
Soluções dos Exercícios Propostos
1. Sim, não, sim, não, não, sim, não, sim ∀A, sim
2. f(x1, x2 ) = (−x
1 + 3x2 , x1 , 2x1 +x2 ).
−1 3
−3
4
7
3. (a) 1 0 ; (b) 2 −1 ; (c) −3
2 1
3 −2
−5
28
sse A2 = O.
1
1
1
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
−1
1
−4
5 13
; (b)
; (c) (31, −10) .
1 −2
2 −2 −5
1 1
1 2 .
0 1
7
4 −7
1 .
, 2 −1
7 −1
0
7. (b) {(1, −2, 1)}; f não é injectiva pois Nuc(f ) não se reduz ao vector nulo; (c) f (IR3 ) = IR2 ,
pelo que f é sobrejectiva.
8. (a) Interpretação geométrica: projecção de um ponto do espaço IR3 no plano XOY ; (c)
Nuc(P ) = {(0, 0, z) : z ∈ IR} (eixo dos ZZ), base: {(0, 0, 1)}; P (IR3 ) = {(x, y, 0) : x, y ∈ IR} (plano
XOY ), base: {(1, 0, 0), (0, 1, 0)}.
9. (a) 0, 3; (b) Não, sim.
10.{(−1, 6,7)}; {(1, 5, −3)
, (−1, 2, −4)} . Não, porque não é isomorfismo.
0 −4 8
11. (b-ii) 1 −14 26 ;(b-iii) (b, −2a + 2b + c, −a + b + c) .
0 −7 13
5 12 11
1 −9 6
12. (a) λ = ±1; (b) {(2, 1, 0) + z (−1, −1, 1) : z ∈ IR}; (c)
3
3 8
3 −3 10
1/2
0
13. (a) 2
1 ; (b) −e1 + e2 .
−1/2
−1
0
0
1
1 −1
1
; (c) Nuc(f) = {polinómio nulo}, dim Nuc(F ) = 0,
14.
(b)
0
1 −1
0 0
1 1 0
0 1
1 1
,
,
, dim f (P2 ) = 3.
f (P2 ) =
0 0 0 0
1 0
15. T −1 (x, y, z) = 12 x, 2x − y, 7x − 3y − z .
2
3
1
5. (b) 0
0
−1 7
6.
−6 7
4. (a)
Referências
[1] Agudo, F. R. D., Introdução à Álgebra Linear e Geometria Analítica, Livraria Escolar Editora,
1996.
[2] Apostol, T., Calculus, Vol 2, Editorial Reverté, 1975.
[3] Giraldes, E., Fernandes, V. H. e Smith, M. P. M, Curso de Álgebra Linear e Geometria Analítica, Editora McGraw-Hill de Portugal, 1995.
[4] Luz, C., Matos, A. e Nunes, S., Álgebra Linear (Volume I), 2a edição, EST Setúbal, 2003.
[5] Magalhães, L. T., Álgebra Linear como Introdução a Matemática Aplicada, Texto Editora, 1991.
[6] Strang, G., Linear Algebra and Its Applications, Academic Press, New York, 1980.
29
M A IC — A n o L e ctivo 2 0 0 4 / 2 0 0 5
Baixar