J. A. M. Felippe de Souza
8 – Transformadas de Fourier
8 – Transformadas de
Fourier
8.1 – Introdução à Análise de Fourier
3
8.2 – A Transformada de Fourier para sinais contínuos
4
Exemplo 8.1
6
Exemplo 8.2
9
Exemplo 8.3
11
8.3 – A Transformada de Fourier para sinais periódicos
13
Exemplo 8.4
14
Exemplo 8.5
15
Exemplo 8.6
15
Exemplo 8.7
17
8.4 – Propriedades da Transformada de Fourier para sinais contínuos
20
Linearidade
20
Translação no tempo (“time shifting”)
21
Exemplo 8.8
21
Conjugação
23
Exemplo 8.9
25
Derivadas
26
Integral
27
Exemplo 8.10
27
Exemplo 8.11
28
Escalonamento no tempo (“time scaling”)
29
Sinal reflectido / reversão no tempo (“time reversal”)
29
1
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Relação de Parseval
30
Dualidade
30
Exemplo 8.12
30
Derivada na frequência (dual da derivada)
31
Dual da integral
31
Translação na frequência (“frequency shifting”)
32
Convolução
32
Multiplicação (dual da convolução)
33
8.5 – Interpretação da propriedade da Convolução
33
Exemplo 8.13
35
Exemplo 8.14
36
Exemplo 8.15
37
Exemplo 8.16
38
8.6 – Tabela da Transformada de Fourier de alguns sinais contínuos
40
8.7 – A Transformada de Fourier para sinais discretos
43
8.8 – Propriedades da Transformada de Fourier para sinais discretos
45
2
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Transformadas de Fourier
8.1 – Introdução às Transformadas de Fourier
Neste capítulo continuaremos a Análise de Fourier estudando agora as Transformadas
de Fourier.
Fig. 8.1 – Jean Baptiste Joseph Fourier (1768-1830), francês.
A obra principal de Fourier tem o título: “Mémoire sur la théorie de la chaleur”, publicada no “Extrait du mémoire lu à l'Académie des sciences” le 1er décembre 1828,
1829, t. 11 p. 13-30.
3
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Na figura 8.2 vemos o livro onde foi publicado esta sua obra e alguns extractos dos
originais de Fourier.
Fig. 8.2 – Alguns extractos dos originais de Fourier. O livro “Extrait du mémoire lu à
l'Académie des sciences”onde foi publicado a principal obra de Fourier e
alguns extractos dos seus originais.
Enquanto que as séries de Fourier eram definidas apenas para sinais periódicos, as
Transformadas de Fourier são definidas para uma classe de sinais muito mais ampla.
Devido ao facto que os sinais sinusoidais são diferenciáveis, a transformada de Fourier permite representar equações diferenciais lineares com coeficientes constantes na
forma de equações algébricas ordinárias.
Outro detalhe: as transformadas de Fourier tornam a operação de convolução em
multiplicações simples.
4
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
8.2 –Transformadas de Fourier para sinais contínuos
A série de Fourier só se aplica a sinais periódicos. Sinais que não são periódicos
(ditos sinais “aperiódicos”) têm uma outra representação com a transformada de Fourier.
Um sinal aperiódico pode ser visto como um sinal periódico com um período infinito.
Mas na série de Fourier, quando o período T de um sinal periódico aumenta, a frequência ωo
ωo =
2π
T
diminui, e o termos harmonicamente relacionados ficam mais próximos na frequência.
Ou seja, quando o período T cresce,
T → ∞
e por conseguinte a frequência ωo diminui
ωo =
2π
→ 0
T
as componentes em frequência (i.e., os ck ‘s) formam um contínuo, e o somatório da
série de Fourier deste sinal se converte em uma integral.
Considere portanto
um sinal contínuo x(t) ∈ C {conjunto dos números complexos}
ou seja, o sinal x(t) tem valores complexos, com parte real e parte imaginária.
A transformada de Fourier deste sinal x(t), normalmente simbolizada por:
F { x(t) } = X(jω)
permite expressar o sinal x(t), o que não era possível com a série de Fourier se o sinal
não fosse periódico, como:
x(t) =
1
2π
∫
∞
−∞
X( j ω ) ⋅ e
5
jω t
dω
eq. (8.1)
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
onde:
X ( jω) =
∫
∞
−∞
x(t ) ⋅ e
− j ⋅ ω⋅ t
⋅ dt
eq. (8.2)
é a transformada de Fourier do sinal x(t).
Portanto, a transformada de Fourier é uma função de ω (ou de jω) e, de certa forma,
generaliza a série de Fourier.
A equação eq. (8.1) acima é conhecida como a equação de síntese, ou também como
a fórmula da transformada inversa de Fourier.
Por outro lado a equação eq. (8.2), que dá propriamente a fórmula da transformada
de Fourier, é conhecida como as equação de análise.
Quanto à convergência destas integrais, é possível mostrar que estas fórmulas são
válidas para uma classe bastante ampla de sinais de duração infinita.
Exemplo 8.1:
Considere o sinal
x(t) = e
−a t
⋅ u1 (t) ,
a >0
cujo gráfico vê-se na figura 8.3.
−at
⋅ u 1 (t ) , a > 0 do Exemplo 8.1.
Fig. 8.3 – O sinal exponencial x ( t ) = e
A transformada de Fourier deste sinal x(t) pode ser calculada usando a equação
eq. (8.2).
6
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
X ( jω) =
=
∫
∞
e
− at
0
⋅e
− j ⋅ ω⋅ t
⋅ dt =
−1
− ( a + jω) t
e
(a + jω)
∞
0
e portanto a transformada de Fourier deste sinal x(t) é dada por:
X ( jω) =
1
,
(a + jω)
a>0
Como a transformada de Fourier tem valores complexos, para expressá-la através de
um gráfico é necessário decompor em
diagrama de módulo |X(jω)|,
e,
diagrama de fase ∠ X(jω).
Para esta transformada X(jω) é fácil de verificar que o diagrama de módulo |X(jω)|
tem a expressão
X ( jω) =
1
a 2 + ω2
que está ilustrado na figura 8.4.
Fig. 8.4 – A transformada de Fourier do sinal x(t). Diagrama de módulo |X(jω)|.
7
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
e que o diagrama de fase ∠ X(jω) tem a expressão
ω
∠ X ( j ω ) = − arctg
a
e isso está ilustrado na figura 8.5.
Fig. 8.5 – A transformada de Fourier do sinal x(t). Diagrama de fase ∠X( j ω).
Observe que se ω = 0, então
ω
arctg = arctg (0) = 0 ,
a
e portanto
∠ X ( j0) = − arctg ( 0 ) = 0 .
ω
π
Também é fácil verificar que se ω = –a, então tg −1 = tg −1 (− 1) = − , e portanto
4
a
ω
π
∠ X ( j ω ) = − arctg →
4
a
ω
π
e portanto
Por outro lado, se ω = a, então arctg = arctg (1) =
4
a
8
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
ω
π
∠ X ( j ω ) = − arctg → −
4
a
Note também que se ω → – ∞, então
ω
arctg =
a
ω
π
lim arctg ≅ arctg (− ∞ ) → − ,
ω → −∞
2
a
e portanto
ω
π
∠ X ( j ω ) = − arctg →
2
a
Mas entretanto, se ω → ∞, então
ω
ω
π
arctg = lim arctg ≅ arctg (∞ ) → ,
ω→∞
2
a
a
e portanto
ω
π
∠ X ( j ω ) = − arctg → −
2
a
Exemplo 8.2:
Considere agora o sinal
x(t ) = e
−a t
,
a >0
cujo gráfico vê-se na figura 8.6.
Fig. 8.6 – O sinal x (t ) = e
−a t
9
, a > 0 do Exemplo 8.2.
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
A transformada de Fourier de x(t) pode ser calculada usando a equação eq. (8.2).
X ( jω) =
∫
∞
e
−a t
⋅e
at
− j ⋅ ω⋅ t
0
0
− j ⋅ ω⋅ t
=
∫
=
1
( a − jω) t
⋅e
(a − jω)
=
−∞
e
⋅e
1
(a − ω)
+
⋅ dt =
∫
⋅ dt +
0
−∞
+
∞
e
−a t
0
⋅e
− j ⋅ ω⋅ t
⋅ dt =
1
− ( a + jω) t
e
− (a + jω)
∞
0
1
(a + ω)
e portanto a transformada de Fourier deste sinal x(t) é dada por:
X ( jω) =
2a
(a − ω2 )
2
o que está ilustrado na figura 8.7.
Fig. 8.7 – A transformada de Fourier do sinal x(t). Diagrama de módulo X ( j ω) .
O diagrama de módulo |X(jω)|
2a
(a 2 − ω2 )
X ( jω) =
10
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Como o X(jω) tem valores reais positivos para | ω | < a e valores reais e negativos
para | ω | < a, o diagrama de fase ∠ X(jω) é tem a expressão
se − a < ω < a
0 ,
∠ X ( jω) =
− π ,
se ω < −a ou
ω> a
e isso está ilustrado na figura 8.8.
Fig. 8.8 – A transformada de Fourier do sinal x(t). Diagrama de fase ∠ X( j ω).
Exemplo 8.3:
Considere agora o sinal
1 ,
x(t) =
0 ,
se t < a
se t > a
cujo gráfico vê-se na figura 8.9 e é chamado de um “pulso quadrado”.
Fig. 8.9 – O sinal x(t) do Exemplo 8.3.
“pulso quadrado”.
Calculando-se a transformada de Fourier de x(t) usando a equação eq. (8.2), temos
X ( jω ) =
=
a
∫ −a
1⋅ e
− j ⋅ ω⋅ t
−1
( − j ω) t
⋅e
( j ω)
e logo,
11
⋅ dt =
a
−a
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
X ( jω ) =
(
1
⋅ e aω j − e − aω j
jω
)
e portanto, usando Eüler, a transformada de Fourier deste sinal x(t) é dada por:
X ( jω ) =
2 sen ( a ω )
ω
Portanto, esta transformada de Fourier X(jω) também só tem valores reais ∀ ω, mas
entretanto, os valores que X(jω) assume são ora positivos e ora negativos, devido às
oscilações do seno.
O gráfico de X(jω) está ilustrado na figura 8.10.
Fig. 8.10 – A transformada de Fourier do sinal x(t) do Exemplo 8.3.
Logo, é fácil de se obter o diagrama de módulo |X(jω)| conforme pode-se ver ilustrado na figura 8.11.
Fig. 8.11 – A transformada de Fourier do sinal x(t) do Exemplo 8.3. Diagrama de
módulo X ( j ω) .
12
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
e o gráfico do diagrama de fase ∠ X(jω) é mostrado na figura 8.12.
Fig. 8.12 – A transformada de Fourier do sinal x(t) do Exemplo 8.3. Diagrama
de fase ∠ X(jω).
Ou seja,
0
∠ X ( jω) =
− π
se
X ( jω) > 0
se
X ( jω) < 0
8.3 – Transformadas de Fourier para sinais periódicos
Note que se
X ( j ω ) = 2π ⋅ u o (ω − ωo )
então
x (t ) =
=
∞
1
⋅ ∫ 2π ⋅ u o (ω − ω o ) ⋅ e
2π − ∞
∫
∞
−∞
= e
u o (ω − ω o ) ⋅ e
j ⋅ ω⋅ t
j ⋅ ω⋅ t
⋅ dω =
⋅ dω =
j ωo t
Logo, se
X ( jω) =
∞
∑ 2π ⋅ c
k = −∞
x(t) então será:
13
k
⋅ u o (ω − kω o )
eq. (8.3)
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
x (t ) =
∞
∑c
k = −∞
k
⋅e
j k ωo
t
que é a série de Fourier para sinais periódicos.
X(jω) que satisfaz a equação eq. (8.3) acima é chamado de
“train of impulses”
e define a transformada de Fourier para os sinais que são periódicos em função dos
coeficientes ck’s da série de Fourier exponencial.
Exemplo 8.4:
Considere o sinal periódico do seno:
x(t) = sen(ωot)
Neste caso os coeficientes ck’s da série exponencial de Fourier são:
1
2j
se k = 1 ⇒
c1 =
se k = −1 ⇒
c −1 = −
se k ∉ { − 1, 1 } ⇒
1
2j
ck = 0
E a transformada de Fourier (“train of impulses”) neste caso é:
X ( jω) =
π
π
⋅ u o ( ω − ω o ) − ⋅ u o (ω + ω o )
j
j
que pode ser vista no gráfico da figura 8.13.
Fig. 8.13 – A transformada de Fourier do sinal x(t) do Exemplo 8.4.
14
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Exemplo 8.5:
Considere o sinal periódico do co-seno:
x(t) = cos(ωot)
Agora, neste caso os coeficientes ck’s da série exponencial de Fourier são:
se k = 1 ⇒
c1 =
1
2
se k = −1 ⇒
c−1 =
1
2
se k ∉ { − 1 , 1 } ⇒
ck = 0
e a transformada de Fourier (“train of impulses”) neste caso é:
X ( j ω ) = π ⋅ u o (ω + ω o ) + π ⋅ u o (ω − ω o )
que encontra-se ilustrado na figura 8.14
Fig. 8.14 – A transformada de Fourier do sinal x(t) do Exemplo 8.5.
Exemplo 8.6:
Considere o sinal x(t) do exemplo 7.1 no capítulo 7 (onda quadrada).
− 1 ,
x(t) =
1,
se
−1 < t < 0
se 0 < t < 1
que após ser repetido (ou estendido) para a direita de t = 1 e para esquerda de t = –1,
nos dá um sinal periódico para ∀t (∞ < t < ∞ ), ilustrado na figura 8.15.
15
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Fig. 8.15 – Onda quadrada estendida para ∀t (∞ < t < ∞).
Este sinal tem frequência natural
2π
= π
T
ωo =
No Exemplo 7.2 vimos que os coeficientes cks da série de Fourier complexa são:
se k = 0, ± 2, ± 4, ...
0,
ck = − 2
j,
π k
se
k = ±1, ± 3, ± 5, ...
Logo a Transformada de Fourier deste sinal x(t) será dada por
X ( jω ) =
∞
∑ 2π ⋅ c
k = −∞
k
⋅ u o ( ω − k ωo ) =
=
−2
2
π
⋅
∑
πk
k = ±1, ±3, ±5 ,K
=
−4
k = ±1, ±3, ±5 ,K k
∑
j ⋅ u o ( ω − k π) =
j ⋅ u o (ω − kπ)
que é um “train of impulses” complexos com áreas: ± 4 j ,
± 4j ± 4j
,
, K localizados
3
5
em ω = ± π, ± 3π, ± 5π,K , respectivamente. Logo, é fácil de se obter o diagrama de
módulo |X(jω)| conforme pode-se ver ilustrado na figura 8.16.
16
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Fig. 8.16 – A transformada de Fourier do sinal x(t), “train of impulses”. Diagrama de módulo X ( j ω) .
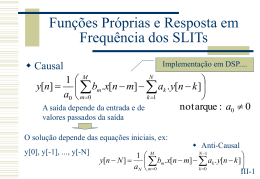
Para o diagrama de fase ∠ X(jω), note que quando os impulsos estão multiplicados
por +j, o ângulo (ou fase) é π/2 (ou 90º); e quando os impulsos estão multiplicados
por –j, o ângulo (ou fase) é –π/2 (ou –90º). Isso pode se ver ilustrado na figura 8.17.
Fig. 8.17 – A transformada de Fourier do sinal x(t) do Exemplo 8.6. Diagrama
de fase ∠ X(jω).
Exemplo 8.7:
Considere o sinal periódico x(t) abaixo:
1 ,
x(t) =
0 ,
se
t <a
se
a< t <
17
T
2
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
e suponha que foi estendido para esquerda e para direita, tornando-o um sinal periódico, como se encontra-se ilustrado na figura 8.18.
Fig. 8.18 – O sinal x(t) do Exemplo 8.7. “Onda quadrada”.
Para calcular os coeficientes ck’s da série de Fourier exponencial, fazemos primeiro
para k = 0, e temos que:
co =
1
T
=
2a
T
a
∫ −a 1 ⋅ dt
Para k ≠ 0 temos que:
ck =
1
T
= −
a
∫ −a
1⋅ e
− j ωo ⋅k t
1
−j
⋅e
j ⋅ ωo ⋅ k ⋅ T
2
=
ωo ⋅ k ⋅ T
e
j ωo ⋅k a
⋅ dt =
ωo ⋅k t a
−a
−e
2j
=
− j ωo ⋅k a
,
k≠0
2π
onde ω o = . Agora, usando-se as equações de Eüler temos que:
T
ck =
2 sen ( k ω o a )
,
k ωo T
ou, equivalentemente:
18
k≠0
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
ck =
sen ( k ω o a )
,
kπ
k≠0
Logo, a transformada de Fourier deste sinal periódico x(t) é o “train of impulses”
X(jω) abaixo:
∞
2a
sen ( k ωo a )
X ( j ω ) = 2π ⋅ ⋅ u o ( a ) + ∑ 2 ⋅
⋅ u o (ω − kωo )
T
k
k = −∞
k≠0
=
∞
γ
∑
k = −∞
k
⋅ u o (ω − kωo )
onde:
4πa
T
γk =
sen ( k ωo a )
2 ⋅
k
se k = 0
se k ≠ 0
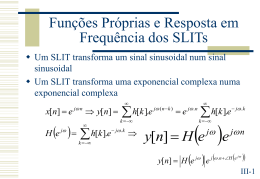
Na figura 8.19 pode-se ver o gráfico de X(jω) x ω para o caso particular de T = 4a.
Fig. 8.19 – A transformada de Fourier do sinal x(t) do Exemplo 8.7.
19
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Neste caso (T = 4a), ωo = π/2, e os valores de ck e dos γk são:
co =
1
2
γo = π
1
π
γ1 = γ −1 = 2
c 2 = c −2 = 0
γ 2 = γ −2 = 0
c1 = c −1 =
γ 3 = γ −3 = −
1
c 3 = c −3 = −
3π
γ 4 = γ −4 = 0
c 4 = c −4 = 0
c 5 = c −5 = −
2
3
1
5π
γ 5 = γ −5 = −
2
5
c 6 = c −6 = 0
γ 6 = γ −6 = 0
M
M
8.4 – Propriedades da Transformada de Fourier para sinais contínuos
Linearidade:
Suponha que
x1(t) e x2(t) são dois sinais contínuos.
e que
y( t ) = α x1 ( t ) + β x 2 ( t )
então, mostra-se que a transformada de Fourier de y(t) é:
Y ( jω) = α ⋅ X1 ( jω) + β ⋅ X 2 ( jω)
ou seja,
F
{ α x1 ( t ) + β x 2 ( t ) } =
α ⋅F
20
{ x1 ( t ) }
+ β⋅ F
{ x 2 (t) }
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Translação no tempo (“time shifting”):
Suponha que x(t) é um sinal contínuo e que:
y( t ) = x ( t − t o )
ou seja, y (t) é o sinal x (t) com uma translação (shift) no tempo, de to.
Então, mostra-se que:
Y ( jω) = e
− j ω to
⋅ X ( jω)
ou seja,
F
{ x(t − t o ) } =
e
− j ω to
⋅F
{ x (t ) }
Nota:
O módulo do sinal transladado não se altera. Somente a fase. Ou seja, escrevendo-se
a transformada de Fourier de x(t) na forma polar (módulo e ângulo):
F
{ x(t) }
= X ( jω) = X ( jω) ⋅ e ∠X ( jω)
temos que a transformada de Fourier de x(t–to) pode ser expressa como:
F
{ x(t − t o ) } =
e
− j ω to
⋅ X ( jω) =
= X ( jω) ⋅ e
j [( ∠X ( jω) − ωt o ]
Uma translação ou shift (de to) no sinal x(t)
⇓
uma translação ou shift (de ωto)
na transformada X(jω) deste sinal.
Exemplo 8.8:
Considere o sinal x(t) da figura 8.20:
21
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Fig. 8.20 – O sinal x(t) do Exemplo 8.8.
Este sinal pode ser reescrito em função de dois sinais transladados: x 1 ( t − 2,5) e
x 2 ( t − 2,5) :
x ( t ) = x 1 ( t − 2,5) + x 2 ( t − 2,5)
que estão representados graficamente na figura 8.21.
Fig. 8.21 – Sinais x1(t) e x2(t) do Exemplo 8.8.
Como as transformadas de Fourier de x1(t) e de x2(t) são respectivamente X1(jω) e
X2(jω):
ω
sen
2
X 1 ( jω ) =
ω
3ω
2 sen
2
X 2 ( jω) =
ω
e
então, usando as propriedades da linearidade e da translação (time shifting) temos
que:
X ( jω) = e
5ω
−j
2
ω
3ω
sen 2 + 2 sen 2
⋅
ω
22
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Conjugação:
Suponha que
x(t) é um sinal com período T e tem coeficientes de Fourier c k
e que
y( t ) = x ∗ ( t )
o conjugado de x(t); então, mostra-se que a transformada de Fourier de y(t) é:
Y ( jω) = X∗ ( − jω)
isto é, a transformada de Fourier do conjugado de um sinal é o simétrico do conjugado da a transformada de Fourier deste sinal:
{ x (t) } =
∗
F
X ∗ (− jω)
Nota:
Como consequência desta propriedade pode-se concluir que:
Se x(t) ∈ R, então
X ( jω) = X ∗ ( − jω)
Além disso, se a transformada de Fourier de x(t) é expressa na forma cartesiana (parte
real e parte imaginária):
F
{ x(t ) }
= X ( jω) = Re{ X ( jω) } + Im{ X ( jω) }
então, como x(t) ∈ R, temos que
Re{ X ( jω) } = Re{ X ( − jω) }
(a parte real de X(jω) é par)
eq. (8.4)
Im{ X ( jω) } = − Im{ X ( − jω) } (a parte imaginária de X(jω) é ímpar) eq. (8.5)
Entretanto, se a transformada de Fourier de x(t) é expressa na forma polar (módulo e
ângulo):
F
{ x(t) } =
X ( jω) = X ( jω) ⋅ e ∠ X ( jω)
23
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Fig. 8.22 – Diagrama esquemático que mostra o módulo e a fase de ambos z e z*.
Conforme ilustra a figura 8.22,
z = z∗
e
∠ z = − ∠ z∗
e portanto, temos então que:
X ( jω) = X ∗ ( − jω)
∠ X ( jω) = − ∠ X ∗ ( − jω)
(o módulo de X(jω) é par)
eq. (8.6)
(a fase de X(jω) é ímpar)
eq. (8.7)
Logo, se x(t) ∈ R, então só é necessário calcular a transformada de Fourier, para frequências
ω>0
tanto no caso de módulo e fase
(
X ( jω)
e ∠ X ( jω) ) ,
como no caso de parte real e parte imaginária
( Re { X (− jω) }
e Im { X ( − jω) }) ,
pois estes valores para frequências negativas ( ω < 0 ) podem ser determinados
usando as relações acima [ eq. (8.4) e eq. (8.5), ou eq. (8.6) e eq. (8.7)].
24
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Outro detalhe:
Se x(t) ∈ R é um sinal par (x ( t ) = x (− t ) ) ⇒
X ( jω) ∈ R, isto é, X ( jω) ∈ eixo real; e
X ( jω) = X ( − jω) , isto é, X ( jω) é par.
(a transformada de Fourier é uma função real e par)
Se x(t) ∈ R é um sinal ímpar (x ( t ) = − x ( − t ) ) ⇒
X ( jω) é imaginário puro , isto é, X ( jω) ∈ eixo imaginário; e
X ( jω) = − X ( − jω) , isto é, X ( jω) é ímpar.
Finalmente, a decomposição de um sinal x(t) em parte par ( Ev { X( jω) } ) e
ímpar ( Od { X ( jω) } ) :
F
{ Ev { x ( t ) }} =
Re {F
F
{Od { x ( t ) }} =
{ x ( t ) }} =
j ⋅ Im {F
Re { X( jω) }
{ x ( t ) }} =
j ⋅ Im { X ( jω) }
eq. (8.8)
eq. (8.9)
Exemplo 8.9:
Considere o sinal x(t) abaixo:
x(t) = e
−a t
, a>0
que vimos na figura 8.6 (Exemplo 8.2) acima. Mas, pelo resultado do Exemplo 8.1
sabemos que:
F
{ x(t) ⋅ u 1 (t) } =
1
(a + jω)
e como
e −a t
x(t ) =
e a t
podemos escrever que:
25
se
t>0
se
t<0
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
x(t ) = e
−a t
⋅ u1 ( t ) + e
at
⋅ u1 ( − t ) =
e − a t ⋅ u1 ( t ) + e a t ⋅ u1 ( − t )
= 2
=
2
{
= 2 ⋅ Ev e
−a t
⋅ u1 ( t )
}
Agora, usando a eq. (8.8) acima, temos que:
F
{ Ev {e −a t ⋅ u (t) } } = Re (a +1 jω)
1
logo,
X ( jω) = 2 ⋅ F
{ Ev{e −a t ⋅ u (t) } } =
1
1
= 2 ⋅ Re
=
(a + jω)
=
2a
a + ω2
(
2
)
que foi o resultado obtido no Exemplo 8.2.
Derivadas:
Suponha que x(t) é um sinal e que
y( t ) =
dx
(t)
dt
então, mostra-se que:
Y ( jω) = jω ⋅ X ( jω)
ou seja,
dx
F
( t ) = jω ⋅ F
dt
26
{ x(t) }
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Nota:
Para o caso de derivadas de ordem 2 ou mais, pode-se aplicar esta regra sucessivas
vezes. Por exemplo, no caso da segunda derivada, se
d2x
y( t ) = 2
dt
então a Transformada de Fourier de y(t) é
Y ( jω) = ( jω) ⋅ X ( jω) = − ω 2 ⋅ X ( jω) .
2
ou seja,
d2x
F 2 = − ω2 ⋅F
dt
{ x(t) }
Integral:
Suponha que x(t) é um sinal e que
y( t ) =
∫
t
−∞
x ( t ) dt
então, mostra-se que:
Y ( jω) =
1
⋅ X ( jω) + πX (0) u o (ω)
jω
ou seja,
F
{∫
t
−∞
x ( τ) dτ
}=
1
⋅F
jω
{ x (t) }
+ πX (0) u o (ω)
Exemplo 8.10:
A transformada de Fourier do impulso unitário uo(t):
F
{ u o (t) }
=
∫
∞
−∞
27
u o ( t ) ⋅ e − jωt dt
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
e usando a propriedade da integral para o impulso unitário uo(t), que vimos no capítulo 3 [eq. (3.13)], isto é,
∫
β
α
x ( t ) ⋅ u o ( t − a ) dt = x (a ),
α<a <β
obtemos que:
{ u o (t) } =
F
e
− j ωt
t=0
=1
Ou seja, a transformada de Fourier do impulso unitário uo(t) é igual a 1.
Exemplo 8.11:
Considere o sinal x(t) degrau unitário u1(t):
x (t ) = u 1 (t )
Como
x(t) =
∫
t
−∞
u o ( τ) d τ
então, como F { u o ( t ) } = 1 usando a propriedade da integral para a transformada
de Fourier, temos que
X ( jω) =
1
+ π⋅1 ⋅ u o (ω)
jω
ou seja, a transformada de Fourier do degrau unitário u1(t) é:
F
{ u 1 (t) } =
1
+ π⋅ u o (ω)
jω
Por outro lado, como
u o (t) =
du1
(t)
dt
usando a propriedade da derivada para a transformada de Fourier, temos que
28
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
F
{ u o (t) } =
jω ⋅ F
{ u 1 (t) } =
1
= jω ⋅
+ π⋅ u o (ω) =
jω
= 1 + j⋅ π ⋅ u o (ω) ⋅ ω
Entretanto, sabemos que u o (ω) = 0 , ∀ω ≠ 0 e isso implica que:
u o (ω) ⋅ ω = 0
e portanto:
F
{ u o (t) }
= 1
que foi o resultado encontrado no Exemplo 8.10.
Escalonamento no tempo (“time scaling”):
Suponha que x(t) é um sinal e que
y( t ) = x (α t )
então, mostra-se que:
1
jω
⋅X
α
α
Y ( jω) =
ou seja,
F
{ x (α t ) }
1
jω
⋅X
α
α
=
Sinal reflectido / reversão no tempo (“time reversal”) em torno de t = 0:
Suponha que x(t) é um sinal e que
y( t ) = x ( − t )
então, mostra-se que:
Y ( jω) = X ( − jω)
ou seja,
F
{ x (− t ) }
29
= X ( − jω)
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Relação de Parseval:
Suponha que x(t) é um sinal. Então, mostra-se que a energia total do sinal
E∞ =
∫
∞
x 2 ( t ) dt
−∞
pode ser expressa em termos da transformada de Fourier pela relação de Parseval:
E =
∫
∞
−∞
1
⋅
2π
x 2 ( t ) dt =
∫
∞
−∞
X ( jω ) dω
2
Dualidade:
Suponha que x1(t) e x2(t) são sinais contínuos e que
F
F
Mostra-se que: se
{ x1 ( t ) }
{ x 2 (t) }
= X1 ( j ω)
= X 2 ( j ω)
x 2 ( t ) = X 1 ( jω )
ω= t
então,
X 2 ( jω ) = 2π ⋅ x 1 ( t )
t =ω
Exemplo 8.12:
Usando o resultado obtido no Exemplo 8.2 podemos afirmar que: se
f (t) = e
− t
então:
F( jω) = F
{ f (t ) }
30
=
(
2
1 + ω2
)
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Logo, se
g( t ) =
(
2
1+ t 2
)
então, pela propriedade da dualidade:
G ( jω) = F
{ g(t ) }
− ω
= 2π ⋅ e
Derivada na frequência (dual da derivada):
Suponha que x(t) é um sinal e que
y( t ) = − ( jt ) ⋅ x ( t )
então, mostra-se que:
dX ( jω)
dω
Y ( jω) =
ou seja,
F
{ − j t ⋅ x (t ) }
=
d
(F
dω
{ x ( t ) })
que é a derivada de X(jω) em ω, ou dita: derivada na frequência.
Dual da integral:
Suponha que x(t) é um sinal e que
y( t ) = −
1
⋅ x ( t ) + π⋅ x (0) ⋅ u o ( t )
jt
então, mostra-se que:
Y ( jω) =
∫
ω
−∞
X ( γ ) dγ
ou seja,
1
F ⋅ x ( t ) + π⋅ x (0) ⋅ u o ( t ) =
jt
31
∫
ω
−∞
X ( γ ) dγ
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Translação na frequência (“frequency shifting”):
Esta propriedade é a dual da propriedade da translação no tempo (“time shifting”).
Agora a translação (shift) foi aplicada à variável ω e não no tempo t.
Suponha que x(t) é um sinal e que
j ω to
y( t ) = e
ou seja, y(t) é o sinal x(t) multiplicado por e
jω
⋅ x(t)
to
.
Então, mostra-se que:
Y( jω) = X( j (ω − ω o ) )
ou seja,
F
{e
j ω to
}
⋅ x ( t ) = X ( j (ω − ω o ) )
a transformada de Fourier de y(t) é a transformada X ( jω) = F {x ( t ) } com uma
translação (shift) na frequência ω, de ωo.
Convolução:
Suponha que x1(t) e x2(t) são sinais contínuos e que
y( t ) =
∫
∞
−∞
x 1 ( t − τ) ⋅ x 2 ( τ) d τ =
= x1 ( t ) ∗ x 2 ( t )
então, mostra-se que:
Y ( jω) = X 1( j ω) ⋅ X 2 ( j ω)
ou seja,
F
{ x 1 (t) ∗ x 2 (t) } =
F
{ x 1 ( t ) }⋅ F { x 2 ( t ) }
= X 1 ( j ω) ⋅ X 2 ( j ω)
isto é, a transformada de Fourier da convolução entre 2 sinais x1(t) e x2(t) é o produto
das transformadas de Fourier destes sinais.
32
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Multiplicação (dual da convolução):
Suponha que x1(t) e x2(t) são sinais contínuos e que
y( t ) = x 1 ( t ) ⋅ x 2 ( t )
Então, mostra-se que:
Y ( jω) =
1
2π
∞
∫ X ( j θ) ⋅ X ( j ⋅( ω − θ )) ⋅ dθ
1
2
−∞
ou seja,
F
{ x 1 (t) ⋅ x 2 (t) }
1
=
2π
∞
∫ X ( j θ) ⋅ X ( j ⋅( ω − θ ) ) ⋅ dθ
1
2
−∞
8.5 – Interpretação da propriedade da Convolução
Uma interpretação da propriedade da Convolução vista na secção anterior é dada aqui.
Já vimos no capítulo 4 (sobre Sistemas) que a saída y(t) de um sistema linear e invariante no tempo (SLIT) é a convolução de h(t) [resposta do sistema ao impulso unitário] com x(t) [sinal de entrada do sistema].
A figura 8.23 ilustra o que foi dito acima através do diagrama de blocos (caixa preta)
de um sistema termos de x(t), h(t) e y(t), conforme visto no capítulo 4.
Fig. 8.23 – Diagrama esquemático de um sistema em função de x(t), h(t) e y(t).
A figura 8.24 apresenta novamente o diagrama de blocos (caixa preta) de um sistema
mas agora em termos de X(jω), H(jω) e Y(jω).
Fig. 8.24 – Diagrama esquemático de um sistema em função de X(jω), H(jω) e Y(jω).
33
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Portanto, Y(jω) = F {y(t)}, a transformada de Fourier da saída y(t) de um sistema é o
produto
Y ( jω) = H ( j ω) ⋅ X ( j ω)
onde:
H(jω) = F {h(t)} = a transformada de Fourier de h(t) [resposta impulsional do
sistema], também chamado de “resposta na frequência”.
X(jω) = F {x(t)} = a transformada de Fourier x(t) [sinal de entrada do sistema]
A propriedade da convolução permite escrevermos o diagrama de blocos (caixa preta)
na forma mostrada na figura 8.25.
Fig. 8.25 – Diagrama esquemático de um sistema em função de X(jω), H(jω) e Y(jω)
ilustrando a propriedade da transformada da convolução.
Além disso, também foi visto no capítulo 4 (sobre Sistemas) que se dois sistemas S1 e
S2, lineares e invariantes no tempo (SLIT), estão ligados em cascata, conforme ilustra
a figura 8.26, então a resposta à entrada impulso unitário dos dois sistemas juntos
(S1 e S2) é a convolução ( h1(t) * h2(t) ).
Fig. 8.26 – Diagrama esquemático de um sistema em cascata.
Portanto, a saída y(t) deste sistema em cascata é a convolução (dupla) de h1(t) com
h2(t) com x(t).
y(t ) = h 1 (t ) ∗ h 2 (t ) ∗ x (t )
e isso está ilustrado na figura 8.27.
Fig. 8.27 – Diagrama esquemático de um sistema em cascata.
34
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Este sistema em cascata pode ser representado de forma equivalente por apenas um
bloco conforme mostra a figura 8.28.
Fig. 8.28 – Diagrama esquemático equivalente a de um sistema em cascata.
Pela propriedade da convolução para a Transformada de Fourier, a resposta na frequência deste sistema é
H ( jω) = H 1 ( j ω) ⋅ H 2 ( j ω)
e a transformada de Fourier da saída y(t) deste sistema em cascata é o produto das
transformadas de Fourier de h1(t), h2(t) e x(t).
F
{ y( t ) } =
{ h 1 (t ) }⋅ F { h 2 ( t ) }⋅ F { x (t ) }
F
= H 1 ( j ω) ⋅ H 2 ( j ω) ⋅ X ( j ω)
E isso está ilustrado na figura 8.29.
Fig. 8.29 – Diagrama esquemático equivalente a de um sistema em cascata.
Exemplo 8.13:
Considere o sistema SLIT onde a resposta ao impulso é dada por
h ( t ) = u o (t − t o ) .
Usando a propriedade dual do “time shifting” para a transformada de Fourier, obtemos a resposta no domínio da frequência, a transformada de Fourier de h(t)
H( jω) = e
− jω t o
= e
− jω t o
e isso está ilustrado na figura 8.30.
35
⋅ F {u o (t )} =
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Fig. 8.30 – Diagrama esquemático de um sistema SLIT com H( jω) = e
− jωt o
.
Portanto, para uma entrada x(t) com transformada de Fourier X(jω) = F {x(t)}, temse que a transformada de Fourier da saída y(t), Y(jω) = F {y(t)} é dada por
Y ( jω) = H ( j ω) ⋅ X ( j ω) =
= e
− jω t o
⋅ X ( j ω)
e portanto, usando a propriedade dual do “time shifting” para a transformada de Fourier
y( t ) = x ( t − t o )
observamos que a saída y(t) é o sinal x(t) com uma translação (shift) de to e que este
sistema é o “sistema com retardo” (time delay system).
Exemplo 8.14:
Considere o sistema SLIT chamado de “diferenciador”, onde para um sinal de
entrada x(t) a saída y(t) é a sua derivada
y( t ) =
dx
(t )
dt
conforme está ilustrado na figura 8.31.
Fig. 8.31 – Diagrama esquemático do sistema “diferenciador”.
Usando a propriedade da derivada para a transformada de Fourier temos que
Y ( jω) = F
{y ( t ) }
36
= jω ⋅ X ( j ω)
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Logo, pela propriedade da convolução para a transformada de Fourier, a resposta na
frequência H(jω) é
H ( j ω) = j ω
que se encontra ilustrado na figura 8.32.
Fig. 8.32 – Diagrama esquemático do sistema “diferenciador”, H ( j ω) = j ω .
Este resultado é consistente com a definição de H(jω), pois
du o ( t )
dt
h (t ) =
e portanto H(jω) = F {h(t)} é
H ( jω) = j ω ⋅ F
{u o ( t ) } =
= jω
Exemplo 8.15:
Considere agora o sistema SLIT abaixo chamado de “integrador”, onde para um sinal
de entrada x(t) a saída y(t) é a sua integral
y( t ) =
∫
t
−∞
x ( τ) d τ
que está ilustrado na figura 8.33.
Fig. 8.33 – Diagrama esquemático do sistema “integrador”.
37
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
Usando a propriedade da integral para a transformada de Fourier,
F
{∫
t
−∞
}
u 1 ( τ) d τ =
1
+ π u o (ω)
jω
e, como
h (t ) =
∫
t
−∞
u o ( τ) d τ
então a resposta do sistema na frequência é:
H ( jω) = F
{h ( t ) } =
1
+ π u o (ω) .
jω
que se encontra ilustrado na figura 8.34.
Fig. 8.34 – Diagrama esquemático do sistema “integrador”.
e pela propriedade da convolução para a transformada de Fourier, temos que Y(jω), a
a transformada de Fourier da saída y(t) é dada por
Y ( jω ) = H ( jω) X ( jω) =
1
⋅ X ( jω) + π⋅ X ( jω) ⋅ u o (ω) =
jω
1
⋅ X ( jω) + π⋅ X (0 ) ⋅ u o (ω)
jω
=
que é o mesmo resultado que obtemos calculando Y ( j ω) = F
dade da integral para transformada de Fourier.
F
{∫
t
−∞
}
x ( τ) d τ =
{ y( t ) } pela proprie-
1
⋅ X ( jω ) + π⋅ X (0 ) ⋅ u o (ω)
jω
Exemplo 8.16:
Considere agora o filtro passa-baixa ideal (“low pass band filter”).
38
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
1
H ( jω ) =
0
se
ω < ωc
se
ω > ωc
que se encontra ilustrado na figura 8.35.
Fig. 8.35 – Diagrama esquemático do filtro passa-baixa ideal (“low pass band filter”).
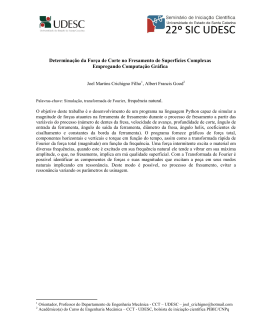
Pelo Exemplo 8.3 e pela propriedade da dualidade para transformada de Fourier
temos que
h (t ) = F -1 { H ( jω)} =
=
sen (ωc t )
πt
cujo gráfico é mostrado na figura 8.36.
Fig. 8.36 – Gráfico de h(t) do filtro passa-baixa ideal (“low pass band filter”).
39
J. A. M. Felippe de Souza
8 – Transformadas de Fourier
8.6 – Tabela da Transformada de Fourier de alguns sinais contínuos
conhecidos
x(t)
X(jω
ω)
x(t) = uo(t)
X(jω) = 1, ∀ω
X ( jω) =
x(t) = u1(t)
X ( jω) =
x(t) = u2(t)
x(t) = e
1
+ π ⋅ u o (ω)
jω
1
1
+ u o (ω)
2
( j ω)
j
X ( jω) = 2π u o (ω − ωo )
jωt
X ( jω) = 2π u o (ω)
x(t) = 1, ∀t
π
[u o (ω − ωo ) − u o (ω + ωo )]
j
x(t) = sen ωot
X ( jω) =
x(t) = cos ωot
X ( jω) = π [u o (ω − ωo ) + u o (ω + ωo )]
–at
X ( jω) =
1
(a + jω)
x( t ) = t ⋅ e − at u1 (t ) , a > 0
X ( jω) =
1
(a + jω) 2
t n −1
x(t ) =
⋅ e − at u1 ( t ) , a > 0
(n − 1)!
X ( jω) =
1
(a + jω) n
x(t) = e
x (t ) =
u1(t) , a > 0
1
x (t ) =
0
x (t ) =
1
X ( jω ) =
0
sen(ω c t )
πt
se
t < to
se
t > to
X( jω) =
+∞
∑ u o ( t − nT )
X ( jω) =
n = −∞
40
2π
T
se ω < ω c
se ω > ω c
2 ⋅ sen(ω t o )
ω
+∞
∑u
k =−∞
o
2πk
ω −
T
Baixar