Universidade Federal da Bahia
Instituto de Matemática
Programa de Pós-Graduação em Matemática
Dissertação de Mestrado
Superfı́cies tipo-espaço de curvatura média
constante com bordo livre em espaços de
Lorentz-Minkowski
Ednaldo Oliveira da Silva Junior
Salvador-Bahia
Fevereiro de 2009
Superfı́cies tipo-espaço de curvatura média
constante com bordo livre em espaços de
Lorentz-Minkowski
Ednaldo Oliveira da Silva Junior
Dissertação
de
Mestrado
apresentada
ao
Colegiado da Pós-Graduação em Matemática da
Universidade Federal da Bahia como requisito
parcial para obtenção do tı́tulo de Mestre em
Matemática.
Orientador: Prof. Dr. Enaldo Silva Vergasta.
Salvador-Bahia
Fevereiro de 2009
Silva Junior, Ednaldo Oliveira da.
Superfı́cies tipo-espaço de curvatura média constante com bordo livre em espaços
de Lorentz-Minkowski / Ednaldo Oliveira da Silva Junior. – Salvador, 2009.
32 f. : il.
Orientador: Prof. Dr. Enaldo Silva Vergasta.
Dissertação (mestrado) – Universidade Federal da Bahia, Instituto de Matemática,
Programa de Pós-graduação em Matemática, 2009.
Referências bibliográficas.
1.
de
Geometria diferencial.
curvatura
constante.
2.
I.
Superfı́cies (Matemática).
Vergasta,
Enaldo
Silva.
3.
II.
Superfı́cies
Universidade
Federal da Bahia, Instituto de Matemática. III. Tı́tulo.
CDD - 516
Superfı́cies tipo-espaço de curvatura média
constante com bordo livre em espaços de
Lorentz-Minkowski
Ednaldo Oliveira da Silva Junior
Dissertação
de
Mestrado
apresentada
ao
Colegiado da Pós-Graduação em Matemática da
Universidade Federal da Bahia como requisito
parcial para obtenção do tı́tulo de Mestre em
Matemática.
Banca examinadora:
Prof. Dr. Enaldo Silva Vergasta (Orientador)
UFBA
Prof.a Dr.a Rosa Maria dos Santos Barreiro Chaves
USP
Prof. Dr. Evandro Carlos Ferreira dos Santos
UFBA
Aos meus pais, irmã e amigos sem os quais não seria
possı́vel esse trabalho.
Agradecimentos
Agradeço primeiramente à Deus, por me ceder forças para alcançar meus objetivos. Não menos importante agradeço à minha querida mãe, sem a qual seria praticamente
impossı́vel este trabalho. Agradeço ao profo Dr Enaldo Silva Vergasta, pelas palavras de
estı́mulo e as broncas nas horas certas. Aos meus colegas de mestrado e amigos de convivio diário pelos auxı́los técnicos na elaboração deste trabalho. Agradeço a todos os
funcionários e professores e à CAPES pela ajuda financeira.
Resumo
Neste trabalho, tratamos de um problema variacional para superfı́cies tipo-espaço
no espaço de Lorentz-Minkowski, cujos pontos crı́ticos são superfı́cies de curvatura média
constante que intersectam uma dada superfı́cie suporte sob um ângulo hiperbólico constante. Verifica-se que, se a superfı́cie suporte é um plano tipo-espaço ou um plano hiperbólico, então os pontos crı́ticos têm que ser, respectivamente, um disco plano ou uma
calota hiperbólica.
Palavras-chave:
Superfı́cies tipo-espaço; curvatura média constante; bordo livre;
espaços de Minkowski.
Abstract
In this work, we deal with a variacional problem for spacelike into LorentzMinkowski space, whose critical points are constant mean curvature that intersect a given
support surface under a constant hyperbolic angle. It is shown that, if the support surface
is a spacelike plain or a hyperbolic plan, then the critical points must be a hyperbolic
plain disc or a hyperbolic cap, respectively.
Keywords: Spacelike surfaces; Constant mean curvature; Free boundary; Minkowiski
space.
Sumário
Introdução
1
1 Preliminares
3
1.1
Notações necessárias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2
Definições e resultados necessários . . . . . . . . . . . . . . . . . . . . . . .
4
1.2.1
Conexões afins . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.2.2
Primeira e segunda forma fundamentais
5
. . . . . . . . . . . . . . .
2 O problema variacional
7
3 Superfı́cies Estacionárias com bordo livre plano ou hiperbólico
13
4 Algumas considerações sobre o caso n-dimensional
28
Referências
31
Introdução
O estudo de hipersuperfı́cies tipo-espaço (ou mas geralmente hipersuperfı́cies) em
espaços de Lorentz é de interesse substancial, não somente do ponto de vista matemático,
mas também do ponto de vista fı́sico. Por exemplo, as hipersuperfı́cies maximais (que
são hipersuperfı́cies tipo-espaço de curvatura média nula) são soluções iniciais convenientes para o problema de Cauchy das equações de Einstein. Quando a hipersuperfı́cie
tipo-espaço possui curvatura média constante não-nula, elas são usadas no estudo da
propagação de ondas gravitacionais.
Do ponto de vista matemático, Barbosa e Oliker em [BO1] e [BO2] mostraram que
as hipersuperfı́cies tipo-espaço de curvatura média constante são soluções de um problema
variacional, já que são pontos crı́ticos do funcional área para variações que possuem função
volume constante e mantêm o bordo fixo.
Sejam Σ ⊂ L3 uma superfı́cie tipo-espaço conexa mergulhada e M uma superfı́cie
tipo-espaço compacta imersa em L3 , com bordo contido em Σ e interior contido em L3+
(futuro de Σ).
Nosso problema consiste em estudar os pontos crı́ticos de um certo funcional
energia, para todas as superfı́cies imersas em L3 , com bordo contido em Σ e interior
contido no futuro de Σ. Tais pontos crı́ticos são chamados de superfı́cies estacionárias.
O funcional energia é dado por E = A − cosh βS onde A é a área de M, S é a
área do domı́nio de Σ limitada pelo bordo de M e β é o ângulo formado pela interseção
entre Σ e M.
Esta dissertação é baseada no artigo de Luı́s J Alı́as e José A Pastor [AP2].
Enunciaremos abaixo os teoremas principais deste trabalho.
Teorema 3.0.5. As únicas superfı́cies estacionárias imersas em L3 com superfı́cie suporte plana são os discos planos com (H = 0) e as calotas hiperbólicas com
(H 6= 0).
Teorema 3.0.6. As únicas superfı́cies estacionárias imersas em L3 com superfı́cie suporte hiperbólica são os discos planos com (H = 0) e as calotas hiperbólicas
com (H 6= 0).
Em 1998, Luı́s Alı́as e R. López obtiveram um resultado de unicidade similar para
1
2
o caso de superfı́cies tipo-espaço com curvatura média constante em L3 , com bordo circular
fixado, onde a prova foi baseada em duas fórmulas integrais para superfı́cies tipo-espaço
em L3 : a fórmula do fluxo e a desigualdade integral.
A prova feita por Alı́as e Pastor é baseada na estrutura complexa da superfı́cie
como uma superfı́cie de Riemann, explorando o fato de que a curvatura média é constante, condição esta que implica que a diferencial de Hopf da imersão é holomorfa. A
demostração dos teoremas principais depende da combinação de dois resultados.
O primeiro é uma caracterização de superfı́cies estacionárias, dada pela seguinte
proposição.
Proposição 2.0.2. Seja Σ uma superfı́cie suporte e seja x : M −→ L3 uma
imersão tipo-espaço tal que x(int(M )) ⊂ L3+ e x(∂M ) = Γ ⊂ Σ é uma curva fechada
contida em Σ cujo bordo delimita um domı́nio compacto. Então x é estacionária, se e
somente se, a curvatura média H é constante e x(M ) intersecta a superfı́cie suporte Σ, ao
longo de Γ, sob um ângulo hiperbólico β, dado por cosh β = −hN, NΣ i. Se x : M −→ L3 é
estacionária, então {τ, ν, N } e {τ, νΣ , NΣ } são dois triedros ao longo de Γ que satisfazem
às equações,
ν = cosh βνΣ − sinh βNΣ
e
N = − sinh βνΣ + cosh βNΣ
O outro resultado trata de observar que a superfı́cie é topologicamente um disco,
resultado este que é consequência do seguinte Lema,
Lema 3.0.7. Seja x : M −→ L3 uma imersão tipo-espaço compacta tal que
x(∂M ) = Γ é uma curva fechada contida no plano tipo-espaço Σ, cujo bordo delimita um
domı́nio Ω. Então a projeção ortogonal de M sobre o plano Σ é um difeomorfismo entre
M e Ω.
No Capı́tulo 1, trataremos de alguns conceitos e resultados relacionados com
Geometria Riemanianna, que serão utilizados ao longo do trabalho.
No Capı́tulo 2, trataremos do problema variacional e mostraremos a Proposição
2.0.2.
No Capı́tulo 3, mostraremos os teoremas principais deste trabalho, referentes à
superfı́cies estacionárias com bordo livres plano ou hiperbólico, bem com o Lema 3.0.7.
Finalmente, no capı́tulo 4, faremos alguns comentários, e divagaremos sobre uma
possı́vel generalização (caso n-dimensional) do caso n = 2.
Capı́tulo 1
Preliminares
Nosso objetivo neste capı́tulo é apresentar definições, resultados e estabelecer as
notações necessárias à compreensão dos capı́tulos subseqüentes.
1.1
Notações necessárias
Denotaremos por L3 o espaço tri-dimensional de Lorentz-Minkowski, formado por
vetores do R3 com a métrica Lorentziana
h. , .i = (dx1 )2 + (dx2 )2 − (dx3 )2 ,
onde (x1 , x2 , x3 ) são as coodenadas canônicas em R3 . Durante esta dissertação, denotaremos por Σ uma superfı́cie conexa tipo-espaço mergulhada em L3 , e consideraremos que Σ
está orientada por NΣ , que é o único campo vetorial unitário normal a Σ, do tipo-tempo
e dirigido para o futuro, ou seja, apontando para o mesmo lado do vetor (0, 0, 1).
Assuma que Σ divide L3 em duas componentes conexas e denotaremos por L3+
a componente para a qual NΣ está apontando. Neste caso, não há dificuldade em ver
que a projeção Π : Σ −→ R2 sobre o plano x3 = 0 é um difeomorfismo local que satisfaz
Π∗ (h., .i0 ) ≥ h., .i, onde h., .i0 representa a metrica Euclidiana no R2 . Isso mostra que Π
aumenta a distância. Como Σ é completa isto implica que Π(Σ) = R2 e que Π é uma
aplicação de recobrimento. Já que R2 é simplesmente conexo, então Π é um difeomorfismo
global e a superfı́cie Σ é, de fato, um gráfico inteiro sobre o plano (x1 , x2 ).
Seja M uma superfı́cie conexa compacta e suave com bordo não-vazio ∂M e seja
x : M → L3 uma imersão suave tipo-espaço tal que
x(int(M) ⊂ L3+
(1.1)
x(∂M) = Γ ⊂ Σ
(1.2)
e
3
4
é uma curva contida em Σ cujo bordo é um domı́nio compacto Ω ⊂ Σ.
Assumiremos que a restrição da imersão x ao bordo ∂M é um difeomorfismo sobre
Γ e dizemos que a imersão x : M → L3 é uma superfı́cie tipo-espaço com bordo Γ.
Ao longo deste trabalho, consideraremos que M é orientada por um campo vetorial
unitário tipo-tempo N normal a M. Se ∇0 denota a métrica da conexão flat de L3 , então
o operador de Weingartein A associado a N é dado por
A(υ) = −∇0 υ N
para um vetor tangente qualquer υ. A função curvatura média de M é definida por H =
1
− tr(A).
2
A orientação de M induz uma orientação natural em ∂M da seguinte maneira:
um vetor tangente não-nulo υ ∈ Tp (∂M) é orientado positivamente, se e somente se, para
qualquer vetor w ∈ Tp Σ apontando para dentro, {υ, w} é uma base de Tp Σ orientada
positivamente. Denotaremos por ν um vetor conormal unitário ao longo de ∂M apontando para dentro. Da mesma forma, τ denotará um campo vetorial unitário orientado
positivamente ao longo de ∂M. Denotaremos por v ∧ w o produto vetorial em L3 de dois
vetores v, w ∈ L3 , definido como o único vetor v ∧ w tal que
hv ∧ w, ui = det(v, w, u)
para todo u ∈ L3 . Observe então que τ é dado por τ = −N ∧ ν.
1.2
Definições e resultados necessários
Na seção anterior, falamos sobre superfı́cies tipo-espaço, vetores tipo-espaço, ve-
tores tipo-tempo, entre outros. Mas o que vem a ser esses entes matemáticos?
Bom, nosso ambiente de trabalho é o espaço de Minkowiski, que nada mais é do
3
que o R munido da métrica h., .i = (dx1 )2 + (dx2 )2 − (dx3 )2 .
É fácil ver que, com essa métrica, R3 fica dividido em três subconjuntos, da
seguinte maneira: vetores v para os quais hv, vi > 0 (incluindo v = 0), hv, vi < 0 e
hv, vi = 0. Tais vetores são chamados de vetores tipo-espaço, tipo-tempo e tipo-luz,
respectivamente. O conjunto formado pelos vetores tipo-luz é chamado de cone de luz.
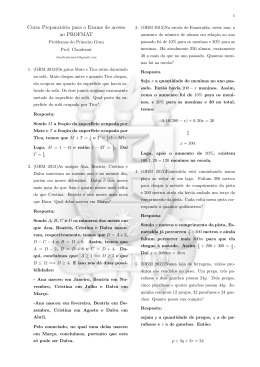
Dizemos que uma superfı́cie Σ ⊂ L3 é do tipo-espaço se dado um ponto qualquer
p ∈ Σ, tivermos que qualquer vetor não-nulo v ∈ Tp Σ é do tipo-espaço, ou seja, hv, vi > 0.
Observe, na figura seguinte, uma representação dos vetores v1 , v2 , v3 , que são
tipo-espaço, tipo-luz e tipo-tempo, respectivamente.
5
Figura 1.2.1
1.2.1
Conexões afins
Indicaremos por χ(Σ) o conjunto dos campos de vetores de classe C∞ em Σ e por
D(Σ) o anel das funções reais de classe C∞ definidas em Σ.
Uma conexão afim ∇ em uma variedade diferenciável Σ é uma aplicação
∇ : χ(Σ) × χ(Σ) −→ χ(Σ)
que se indica por (X, Y ) 7−→ ∇X Y e que satisfaz as seguintes propriedades:
1. ∇f X+gY Z = f ∇X Z + g∇Y Z,
2. ∇X (Y + Z) = ∇X Y + ∇X Z,
3. ∇X (f Y ) = f ∇X Y + X(f )Y ,
onde X, Y Z ∈ χ(Σ) e f, g ∈ D(Σ).
Seja Σ uma variedade diferenciável com conexão afim ∇ e métrica Riemanniana
h., .i. A conexão é dita compatı́vel com a métrica h, i se para toda curva diferenciável c e
quaisquer pares de campos de vetores pararelos P e P0 ao longo de c, tivermos hP, P0 i =
constante.
Lema 1.2.1. Uma conexão ∇ em uma variedade Riemanniana Σ é compatı́vel com a
métrica se e só se
XhY, Zi = h∇X Y, Zi + hY, ∇X Zi, ∀X, Y, Z ∈ χ(Σ).
1.2.2
Primeira e segunda forma fundamentais
O produto interno natural de L3 induz, em cada plano tangente Tp Σ de uma
superfı́cie regular Σ ⊂ L3 , um produto interno, que indicaremos por h., .ip .
6
Se w1 , w2 ∈ Tp Σ, então hw1 , w2 ip é o produto interno Lorentziano de w1 e w2 como vetores
do L3 . A esse produto interno, que é uma forma bilinear e simétrica, corresponde uma
forma quadrática Ip : Tp Σ −→ R, dada por
Ip (w) = hw, wip =| w |2 ≥ 0,
que é chamada de primeira forma fundamental de Σ em p.
Como vimos anteriormente, NΣ representa um campo vetorial normal unitário
do tipo-tempo dirigido para o futuro de Σ. Assim, a aplicação dNΣ : Tp Σ −→ Tp Σ
p
com p ∈ Σ, é uma aplicação linear auto-adjunta. Esse resultado é bastante conhecido
na literatura corrente e isso nos permite associar a dNΣ uma forma quadrática em Tp Σ
p
definida por IIp (v) = −hdNΣ |p (v), vi, que é chamada a segunda forma fundamental de Σ
em p.
Capı́tulo 2
O problema variacional
É bastante conhecida a caracterização das superfı́cies de curvatura média constante, como soluções de um problema variacional. Elas são pontos crı́ticos do funcional
área quando se consideram variações que mantêm o bordo fixo e preservam volume.
Neste capı́tulo, abordaremos um problema variacional um pouco diferente, que
se origina na tentativa de encontrar as superfı́cies estacionárias imersas em L3 , com bordo
contido numa superfı́cie suporte. Porém nosso problema possui uma condição menos restritiva no bordo. A formulação do problema variacional, neste caso, nos leva a considerar
variações de uma dada superfı́cie impondo que, para cada parâmetro num intervalo real,
a superfı́cie correspondente tenha seu bordo (não necessariamente fixo) sobre uma superfı́cie dada (superfı́cie suporte), intersectando-a sob um ângulo hiperbólico constante β.
Em virtude da condição estabelecida sobre o bordo, um problema deste tipo é chamado
de problema de bordo livre.
Seja x :
mathbf M −→ L3 uma imersão suave tipo-espaço satisfazendo
x(intM ) ⊂ L3+
e
x(∂M ) = Γ ⊂ Σ.
Uma variação admissı́vel de x é uma aplicação diferenciável X : (−, ) × M −→
3
L tal que, para cada t ∈ (−, ), a aplicação Xt : M −→ L3 definida por Xt (p) = X(t, p)
é uma imersão tipo-espaço com
Xt (intM ) ⊂ L3+
e
Xt (∂M ) ⊂ Σ,
onde X0 = x. Por esta razão, nos referimos a Σ como superfı́cie suporte.
7
8
Dada uma variação admissı́vel X, a função energia E : (−, ) −→ R é definida
por
E(t) = A(t) − cosh(β)S(t),
onde β ∈ R é uma constante real arbitrária,
Z
A(t) = área(M, Xt ) =
dAt
M
é a área de M na métrica induzida por Xt e
Z
s(t) = área(Ωt ) =
dΣ
Ωt
é a área do domı́nio em Σ limitado por Γt = Xt (∂M ), denotado por Ωt ⊂ Σ.
Aqui dΣ denota o elemento de área de Σ com respeito à métrica induzida e
a escolha da orientação, dAt denota o elemento de área de M com respeito à métrica
induzida por Xt e a orientação dada pelo campo vetorial normal a Xt , tipo-tempo dirigido
para o futuro o qual será denotado por Nt .
A função volume de uma variação V : (−, ) −→ R é dada por
Z
X ∗ (dV ),
Vt =
[0,t]×M
onde dv é o elemento canônico de volume do L3 . Como no caso euclidiano, V (t) representa
o volume limitado pelas superfı́cies X0 = x e Xt . A variação é dita preservar volume se
V (t) = V (0) = 0 para todo t.
Denotemos por ξ o campo variacional de X, dado por
ξ(p) =
∂X
(0, p).
∂t
Ao longo da imersão x :
mathbf M −→ L3 , decompondo ξ em suas componentes tangente e normal, temos ξ =
ξ T + ξ N , onde ξ T ∈ X (M ) é tangente a M. Mas ξ N = aN, então
ξ = ξ T + aN
Como hN, N i = −1 e hξ T , N i = 0, obtemos
hξ, N i = hξ T , N i + ahN, N i
= −a
Consequentemente,
ξ = ξ T − hξ, N iN.
9
Em 1976, Brill e Flahert em [BF] mostraram que as fórmulas da primeira variação
da àrea eram dadas por
dA
= −2
δξ A =
dt |t=0
I
Z
Hhξ, N idA −
M
hξ, νids
∂M
e
dS
δξ S =
=−
dt |t=0
I
hξ, νΣ ids,
∂M
onde ds é o elemento de linha induzido em ∂M e νΣ = NΣ ∧ τ é o vetor unitário conormal
apontando para dentro de Ω ao longo de Γ.
Logo, a fórmula da primeira variação da energia é dada por
dE
= −2
δξ E =
dt |t=0
Z
I
Hhξ, N idA −
ZM
= −2
(hξ, νi − cosh βhξ, νΣ i)ds
I∂M
Hhξ, N idA +
M
Hhξ, νΣ i(cosh β + hN, NΣ i)ds.
(2.1)
∂M
Por outro lado, em 1993, Barbosa e Oliker em ([BO1] e [BO2]) mostraram que
dV
δξ V =
dt
Z
=−
|t=0
hξ, N idA
(2.2)
M
Dizemos que a imersão x é estacionária se δξ E = 0 para toda variação adimissı́vel de
x que preserva volume. A seguinte caracterização de superfı́cies estacionárias segue das
fórmulas 2.1 e 2.2.
Proposição 2.0.2. Seja Σ uma superfı́cie suporte e seja x : M −→ L3 uma imersão
suave tipo-espaço tal que x(intM ) ⊂ L3+ e x(∂M = Γ) ⊂ Σ é uma curva fechada contida
em Σ cujo bordo delimita um domı́nio compacto. Então x é estacionária se, e somente se,
a curvatura média H é constante e x(M ) intersecta a superfı́cie suporte Σ sob um ângulo
hiperbólico constante β, ao longo de Γ, dado por cosh β = −hN, NΣ i.
Se x : M −→ L3 é estacionária, então {τ, ν, N } e {τ, νΣ,NΣ } são dois triedros ao
longo de Γ que satisfazem as relações
ν = cosh βνΣ − sinh βNΣ
e
N = − sinh βνΣ + cosh βNΣ
Prova. Se H é constante e cosh β = −hN, NΣ i, então,
Z
I
dE
= −2
Hhξ, N idA −
(hξ, νi − cosh βhξ, νΣ i)ds
δξ E =
dt |t=0
M
∂M
Z
I
= −2H
hξ, N idA +
hξ, νΣ (−hN, NΣ i + hN, NΣ i)ds
M
∂M
Z
= −2H
hξ, N idA.
M
(2.3)
10
Tome uma variação admissı́vel que preserva volume, ou seja, V (t) = V (0) = 0 para todo t,
o que nos diz que
δξ V =
Por outro lado sabemos que δξ V =
dV
dt
Z
dV
dt
= 0.
|t=0
=−
|t=0
R
M
hξ, N idA. Assim,
hξ, N idA = 0,
M
e finalmente chegamos a δξ E = 0 para toda variação admissı́vel que preserva volume.
Provaremos a primeira implicação da Proposição 2.0.2 em duas estapas. Primeiro
vamos mostrar que H = cte em M, e para isso assumiremos o seguinte resultado.
R
Lema
2.0.3.
Seja
f
:
M
−→
R
uma
função
diferenciável
por
partes
tal
que
f dM = 0
M
e f ∂M ≡ 0. Então existe uma variação admissı́vel que preserva volume cujo campo
variacional é dado por ξ = f N.
A prova deste Lema é essencialmente a mesma que a do Lema 2.4 em [BdC].
Vamos então construir uma função f : M −→ R que cumpra as condições do
R
lema acima. Seja H0 = A1 M HdM.
Assuma que (H − H0 )(p) 6= 0 num ponto p ∈ intM . Podemos portanto assumir
que (H − H0 )(p) > 0.
Tome M + = {q ∈ intM ; (H −H0 )(q) > 0)}, M − = {q ∈ intM ; (H −H0 )(q) < 0},
e observe que M + 6= ∅ e M − 6= ∅.
De fato, por hipótese (H − H0 )(p) > 0 e então p ∈ M + . Como
Z
Z
(H − H0 )dM =
M
Z
HdM − H0
M
dM
M
= H0 A − H0 A
= 0,
ou seja, H − H0 possui média nula, então existe q ∈ intM tal que (H − H0 )(q) < 0, logo
q ∈ M −.
Sejam ϕ, ψ : M −→ R funções reais não-negativas, diferenciáveis por partes,
satisfazendo
p ∈ suppϕ ⊂ M + ,
e
q ∈ suppψ ⊂ M −
onde suppϕ = {x ∈ M ; ϕ(x) 6= 0} é o suporte da função ϕ.
11
Podemos também assumir que
Z
(ϕ + ψ)(H − H0 )dM = 0.
(2.4)
M
De fato, por continuidade existem vizinhanças Vp de p e Vq de q tais que Vp ⊂ suppϕ e
Vq ⊂ suppψ, logo
Z
Z
Z
(ϕ + ψ)(H − H0 )dM =
M
ϕ(H − H0 )dM +
ψ(H − H0 )dM
Vp
Vq
Por outro lado ϕ(H − H0 ) > 0 em Vp e ψ(H − H0 ) < 0 em Vq , logo
Z
ϕ(H − H0 )dM > 0
Vp
e
Z
ψ(H − H0 )dM < 0.
Vq
Multiplicando uma das funções ϕ ou ψ por uma constante apropriada, obtemos
novas funções, denotadas ainda por ϕ e ψ, satisfazendo (2.4), ou seja,
Z
(ϕ + ψ)(H − H0 )dM = 0.
M
Seja f = (ϕ + ψ)(H − H0 ). Então f = 0 em ∂M e
R
f dM = 0. Pelo Lema 2.0.3,
M
existe uma variação que preserva volume cujo campo variacional é ξ = f N, ou seja,
hξ, N i = hf N, N i
= f hN, N i
= f
Em particular, ξ ∂M ≡ 0.
Como x é estacionária, então
Z
I
0 = −2
Hhξ, N idM +
M
hξ, νΣ i(cosh β + hN, NΣ i)ds.
∂M
Mas ξ ∂M ≡ 0. logo
Z
Z
0 = −2
Hhξ, N idM = −2
M
Note que
R
M
f (H − H0 )dM =
R
M
f HdM.
M
f HdM. De fato,
Z
Z
f (H − H0 )dM =
M
Z
f HdM + H0
ZM
=
f HdM,
M
f dM
M
12
portanto,
Z
Z
Z
f HdM = −2
0 = −2
f (H − H0 )dM = −2
M
M
(ϕ + ψ)(H − H0 )2 dM > 0,
M
o que nos fornece uma contradição. Logo, H = H0 = cte.
A segunda etapa consiste em mostrar que cosh β = −hN, NΣ i. Para isso, assumimos também o seguinte resultado que na sua essencia é muito similar ao Lema 2.0.3
utilizado na primeira etapa.
Lema 2.0.4. Dados p ∈ ∂M e f : Vp −→ R onde Vp é uma vizinhança de p em M, então
existe uma variação admissı́vel que preserva volume tal que
ξ(p) = f νΣ (p) ∀p ∈ Vp .
Dado p ∈ ∂M, suponha que (cosh β + hN, NΣ i)(p) > 0. Assim por continuidade, temos
(cosh β+hN, NΣ i)(q) > 0, para todo q numa vizinhança Vp de p em ∂M. Seja g : ∂M −→ R
tal que
g(p) > 0,
g(q) ≥ 0 ∀q ∈ ∂M,
e
suppg ⊂ Vp .
Pelo lema acima, existe uma variação Xt que preserva volume tal que
ξ(p) =
∂X
(0, p) = g(p)νΣ (p) ∀p ∈ Vp .
∂t
Como x é estacionária, então
I
Z
0 = −2H
hξ, N idM +
Mas
R
M
hξ, νΣ i(cosh β + hN, NΣ i)ds.
∂M
M
f dM = 0, pois Xt preserva volume, logo
I
hξ, νΣ i(cosh β + hN, NΣ i)ds.
0=
∂M
Como ξ(p) = g(p)νΣ (p) para todo p ∈ Vp ⊂ ∂M, hνΣ , νΣ i = 1 e (cosh β + hN, NΣ i) > 0,
então
I
g(p)hνΣ , νΣ i(cosh β + hN, NΣ i) > 0,
0=
Vp
o que nos dá uma contradição.
Logo
(cosh β + hN, NΣ i)(p) = 0.
Mas p é arbitrário, assim
cosh β = −hN, NΣ i, ∀p ∈ ∂M
Isto conclui a prova da Proposição 2.0.2.
Capı́tulo 3
Superfı́cies Estacionárias com bordo
livre plano ou hiperbólico
Neste capı́tulo consideramos o caso onde a superfı́cie suporte é um plano tipoespaço ou um plano hiperbólico. Nosso objetivo é mostrar os seguintes resultados de
unicidade.
Teorema 3.0.5. As únicas superfı́cies estacionárias imersas em L3 com superfı́cie suporte
plana são os discos planos, com H = 0, e as calotas hiperbólicas, com H 6= 0.
Teorema 3.0.6. As únicas superfı́cies estacionárias imersas em L3 com superfı́cie suporte
hiperbólica são os discos planos, com H = 0 e as calotas hiperbólicas, com H 6= 0.
Antes de iniciarmos a demonstração do Teorema 3.0.5, precisaremos de uma proposição, algumas afirmações e um lema. O primeiro auxı́lio na prova do Teorema 3.0.5
é mostrar que a superfı́cie é topologicamente um disco. Isso é consequência do seguinte
fato.
Lema 3.0.7. Seja x : M → L3 um imersão tipo-espaço compacta tal que x(∂M ) = Γ
é uma curva fechada contida no plano tipo-espaço Σ o qual delimita com seu bordo um
domı́nio Ω. Então a projeção ortogonal de M sobre o plano Σ é um difeomorfismo entre
M e Ω. Em particular, M é difeomorfa a um disco.
Prova. Podemos assumir, sem perda de generalidade, que o plano tipo-espaço Σ = E2
passando pela origem é dado por E2 = a⊥ , para um vetor a unitário tipo-tempo dirigido
para o futuro. Seja x̃ : M −→ Σ a projeção ortogonal de M sobre o plano Σ e denotaremos
também por x̃ sua restrição ao interior de M, x̃ : int(M ) −→ Σ.
Afirmação 1: x̃ : int(M ) −→ Σ é um difeomorfismo local e, portanto, é uma aplicação
aberta.
Prova da Afirmação 1. Tomemos sem perda de generalidade, E2 = {x3 = 0}, ou seja,
x̃(x1 , x2 , x3 ) = (x1 , x2 , 0), logo dx̃p (v) = dx̃p (v1 , v2 , v3 ) = (v1 , v2 , 0), para qualquer v =
(v1 , v2 , v3 ).
Por outro lado, |dx̃p v|2 = |v|2 = v12 + v22 − v32 . Como M é uma superfı́cie tipoespaço e v ∈ Tp int(M ), se v 6= 0 então |v|2 > 0, logo temos que |dx̃p v| > 0 e portanto
13
14
dx̃p v 6= 0. E assim chegamos que dx̃p é injetiva, logo pelo Teorema da Aplicação Inversa,
x̃ é um difeomorfismo local e portanto uma aplicação aberta. Isto mostra a Afirmação 1.
Nosso objetivo agora é mostrar que x̃(int(M )) = Ω e, a partir daı́, que x̃ é
um difeomorfismo local. Primeiro veremos que ∂ x̃(int(M )) = ∂ x̃(M ) ⊂ Γ, que será
consequência das duas afirmações abaixo.
Afirmação 2: x̃ é sobrejetiva.
Prova da Afirmação 2. De fato, como M é aberto em M e x̃ é uma aplicação aberta
então x̃(M ) e aberto em Ω. Por outro lado M é compacta, então x̃(M ) é compacta, em
particular fechado, e assim x̃(M ) é aberto e fechado em Ω, e como Ω é conexo, concluı́mos
que x̃(M ) = Ω. Portanto, x̃ é sobrejetiva. Isto mostra a Afirmação 2.
Afirmação 3: Se q ∈ ∂(x̃(M )), então existe p ∈ ∂M tal que x̃(p) = q.
Prova da Afirmação 3. De acordo com a Afirmação 2, existe p ∈ M tal que x̃(p) = q.
Se p ∈ int(M ), então existe uma vizinhança aberta Up de p ∈ int(M ) e uma vizinhança
aberta de Vq de q ∈ x̃(int(M )) tais que x̃ : Up −→ Vq é um difeomorfismo. Isto implica
que q ∈ x̃(int(M )), que é uma contradição com o fato que q é um ponto do bordo de
x̃(M ). Isto mostra a Afirmação 3.
Decorre então das Afirmações 2 e 3 que ∂ x̃(int(M )) ⊂ Γ.
Se existir um ponto em x̃(int(M )) que não está em Ω, já que x̃(int(M )) é limitado,
existiriam pontos em ∂ x̃(int(M )) fora de Ω, o que não é possı́vel. Analogamente, se
existirem pontos em Ω que não estão em x̃(int(M )), existiriam pontos em ∂ x̃(int(M ))
dentro de Ω, o que novamente seria impossı́vel. Concluimos então que Ω = x̃(int(M )).
Consequentemente, x̃ : M −→ Ω é um difeomorfismo local, e a compacidade de
M implica que x̃ é uma aplicação de recobrimento. Já que Ω é simplesmente conexo, x̃
tem que ser um difeomorfismo global, o que demostra o Lema 3.0.7.
Vamos agora à demostração do Teorema 3.0.5.
Prova. Seja z = x + iy = reiθ a coordenada usual em C. Sabemos que a métrica em M
é um múltiplo da métrica em R2 , ou seja, é dada pela expressão
ds2 = eρ |dz|2 ,
para uma função suave ρ = ρ(z).
Afirmação 4: A segunda forma fundamental da imersão é dada por
II = Re{φdz 2 + Heρ dzdz}.
onde
φ=
e−g
− if.
2
15
Prova da Afirmação 4. De acordo com o Lema 3.0.7, sabemos que M é topologicamente
um disco. Podemos então parametrizar M por um disco unitário fechado D no plano
complexo.
Seja z = x + iy = reiθ a coordenada usual em C. Como E > 0, podemos considerar, sem perda de generalidade, E = eρ para uma função ρ : C −→ R.
Seja w = aXx + bXy então,
Π(w) = −hdN (w), (w)i
= −hdN (aXx + bXy ), aXx + bXy i
= −haNx + bNy , aXx + bXy i
= −[a2 hNx , Xx i + b2 hNy , Xy i + ab(hNx , Xy i + hNy , Xx i)].
Sabemos que
hNx , Xx i = −e,
hNy , Xy i = −g
e
hNx , Xy i = hNy , Xx i = −f.
Daı́,
Π(w) = a2 e + 2abf + b2 g.
Por outro lado, utilizando que X é isotérmica, ou seja, E = G e F = 0, temos
que
I(w) = hw, wi
= haXx + bXy , aXx + bXy i
= a2 E + b2 E = (a2 + b2 )E.
Portanto
I(w) = E|dz|2 = E(dx2 + dy 2 ),
logo
Π(w) = edx2 + 2f dxdy + gdy 2 .
Como z = x + iy, temos
dz = dx + idy,
dz = dx − idy
e
dz 2 = dx2 − dy 2 + 2idxdy,
dzdz = dx2 + dy 2 .
16
Podemos então escrever
e−g
2
φdz + HEdzdz =
− if dx2 − dy 2 + 2idxdy + HE(dx2 + dy 2 ).
2
eg − f 2
e+g
eK=
, logo
2E
E2
e+g
e−g
2
φdz + HEdzdz =
− if dx2 − dy 2 + 2idxdy +
dx2 + dy 2
2
2
e−g e+g
e+g e−g
=
+
dx2 +
−
dy 2 − 2f dxdy + i(A)
2
2
2
2
2
2
= edx + gdy + 2f dxdy + i(A),
Mas H =
onde A é uma função real. Dessa forma,
Re φdz 2 + HEdzdz = edx2 + 2f dxdy + gdy 2 .
e assim
Π = Re φdz 2 + Heρ dzdz .
o que prova a Afirmação 4.
A expressão Q = φdz 2 define uma diferencial quadrática invariante em M , que é
chamada de Diferencial de Hopf.
Afirmação 5: A norma intrı́nseca de Q é dada por
|Q|2 = 2e−2ρ |φ|2 = 2(H 2 − K) ≥ 0.
(3.1)
Prova da Afirmação 5. Mostremos inicialmente que |Q|2 = 2e−2ρ |φ|2 .
De fato, |Q|2 = |φ|2 |dz 2 |2 e
|dz 2 |2 = |dx2 − dy 2 + 2idxdy|2
= (dx2 − dy 2 )2 + (2dxdy)2
= (dx2 )2 − 2dx2 dy 2 + (dy 2 )2 + 4dx2 dy 2
= (dx2 )2 + 2dx2 dy 2 + (dy 2 )2
= (dx2 + dy 2 )2 .
Sabemos que
I = ds2 = E|dz|2 ,
onde |dz|2 = dx2 + dy 2 e, aplicando a um vetor v = (a, b) temos
|dz|2 (v) = a2 + b2 .
(3.2)
17
Assim,
ds2 (v) = E|dz|2 (v) = E(a2 + b2 ).
Por outro lado, |Q|2 = |Qv1 |2 + |Qv2 |2 , onde {v1 , v2 } é uma base ortonormal de Tp Σ.
1
1
Considere v1 = √ (a1 , b1 ) e v2 = √ (a2 , b2 ), com a21 + b21 = a22 + b22 = 1 e
E
E
hv1 , v2 i = 0. Assim,
2
a1 b21
2
+
=1
ds (v1 ) = E
E
E
e
2
a2 b22
2
ds (v2 ) = E
+
= 1.
E
E
Daı́
|Q|2 = |Qv1 |2 + |Qv2 |2
= |φdz 2 (v1 )|2 + |φdz 2 (v2 )|2
= |φ|2 |dz 2 (v1 )|2 + |dz 2 (v2 )|2 ,
por (3.2) temos que
|dz 2 (v1 )|2 = (dx2 (v1 ) + dy 2 (v1 ))2
2
2
a1 b21
+
=
E
E
2
1 2
2
=
(a + b1 )
E 1
1
=
.
E2
Do mesmo modo, |dz 2 (v2 )|2 =
|Q|2 = |φ|2
1
, logo
E2
2
= 2E −2 |φ|2 = 2e−2ρ |φ|2 .
2
E
(3.3)
que é a primeira igualdade em (3.1).
Vamos mostrar agora que |Q|2 = 2(H 2 − K) ≥ 0. De fato,
e−g
Como φ =
− if , temos que
2
e2 − 2eg + g 2
+ f2
4
e2 − 2eg + g 2 + 4f 2
=
,
4
|φ|2 =
ou seja,
4|φ|2 = e2 − 2eg + g 2 + 4f 2
(3.4)
18
usando (3.3) e (3.4), temos,
2
e+g
f 2 − eg
+
2E
E2
e2 + 2eg + g 2 4f 2 − 4eg
+
4E 2
4E 2
2
2
2
e − 2eg + g + 4f
4E 2
2
|φ|
E2
e−2ρ |φ|2
|Q|2
.
2
2
H −K =
=
=
=
=
=
que é a segunda igualdade em (3.1).
Verifica-se facilmente que, se k1 e k2 são as curvaturas principais da imersão x,
então
H 2 − K = (k1 − k2 )2 ,
logo H 2 − K ≥ 0 e a igualdade ocorre exatamente nos pontos umbı́licos. E isto conclui a
prova da Afirmação 5.
∂φ
∂H
=E
.
∂z
∂z
Prova da Afirmação 6. Sabemos, de acordo com [dC2], que as equações de MainardiAfirmação 6:
Codazzi são dadas por
fy − gx = −Ex H
(3.5)
ey − fx = Ey H,
(3.6)
e
as quais podem ser reescritas como
e−g
+ fy = EHx
2
x
(3.7)
e
e−g
2
− fx = −EHy .
y
De fato, como x é isotérmica temos
H=
e+g
1
1
= (e + g) ,
2E
2
E
que derivando com relação a x dá origem a
1
1
1
Hx =
(ex + gx ) − (e + g) 2 Ex
2
E
E
(3.8)
19
Note que
H
e+g
=
, logo
E
2E 2
Hx =
ex + gx
2E
e assim
EHx =
−
ex + gx
2
e+g
2E 2
Ex
− Ex H.
Por (3.5) temos que
ex + gx
+ fy − gx
2
ex − gx
+ fy
=
2 e−g
=
+ fy ,
2
x
EHx =
e isso mostra a equação (3.7).
Derivando agora a função H com relação a y temos
1
1
1
Hy =
(ey + gy ) − (e + g) 2 Ey .
2
E
E
Lembrando que
e+g
H
=
, ficamos com
E
2E 2
e y + gy
e+g
Hy =
−
Ey ,
2E
2E 2
e assim
EHy =
e y + gy
− Ey H.
2
Por (3.6), temos que
ey + gy
− e y + fx
2
−ey + gy
=
+ fx
2
"
#
e−g
= −
− fx ,
2
y
EHy =
e isso mostra a equação (3.8).
Sabemos que
1
∂z = (∂x − i∂y )
2
e
1
∂z = (∂x + i∂y ).
2
20
Assim, ficamos com
∂φ
∂φ
+i
∂u
∂v
(
"
#)
1
e−g
e−g
=
− ifx + i
− ify
2
2
2
x
y
(
)
1
e−g
e−g
=
− ifx + i
+ fy
2
2
2
x
y
(
"
#)
1
e−g
e−g
=
+ fy + i
− fx
2
2
2
x
y
1
∂φ
=
∂z
2
e assim teremos que
∂φ
1
=
(EHx − iEHy )
∂z
2
1
(Hx − iHy )
= E
2
∂H
,
= E
∂z
e isto mostra a Afirmação 6.
Decorre da Afirmação 6, que como H = cte então φ é holomorfa.
De acordo com o Lema 3.0.7, M é topologicamente um disco. Assim no bordo de M ,
1
temos que r = |z| = 1 e ∂z = (∂x − i∂y ). Sabemos que
2
z = x + iy = reiθ ,
onde
r = |z| =
p
x2 + y 2
e
θ = arctan
y
x
.
Por outro lado,
∂x =
∂r
∂θ
∂r +
∂θ
∂x
∂x
∂y =
∂r
∂θ
∂r +
∂θ .
∂y
∂y
e
Como
∂r
1
x
= p
2x = ,
2
2
∂x
r
2 x +y
21
∂r
1
y
= p
2y = ,
2
2
∂y
r
2 x +y
−y
∂θ 1 −y
=
= 2,
2
2
y
∂x
x
r
1+ 2
x
∂θ 1 1
x
=
= 2,
2
y
∂y
x
r
1+ 2
x
e
para r = 1 ficamos com
∂r
= x,
∂x
∂r
= y,
∂y
∂θ
= −y,
∂x
e
∂θ
= x.
∂y
Portanto,
1
(∂x − i∂y )
2
1
=
[x∂r − y∂θ − i (y∂r + x∂θ )]
2
1
[(x − iy) ∂r + (−y − ix) ∂θ ] .
=
2
∂z =
Por outro lado, sabemos que
x − iy = z
e
−y − ix = −iz.
Note também que
z = e−iθ
e
−i θ+
iz = e
Logo, temos que
π!
2 .
22
1
(∂x − i∂y )
2
−i
1 −iθ
e ∂r − e
=
2
∂z =
=
θ+
π!
2 ∂θ
1
(z∂r − iz∂θ ) .
2
Afirmação 7: φ = 2Π(∂z , ∂z ).
prova da Afirmação 7. Como Π é bilinear e simétrica, então
1
1
11
2Π[ (∂x − i∂y ), (∂x − i∂y )] = 2 Π(∂x − i∂y , ∂x − i∂y )
2
2
22
1
=
[Π(∂x , ∂x ) + Π(∂x , −i∂y ) + Π(−i∂y , ∂x ) + Π(−i∂y , −i∂y )]
2
1
=
[Π(∂x , ∂x ) − iΠ(∂x , ∂y ) − iΠ(∂y , ∂x ) + (−i)2 Π(∂y , ∂y )]
2
1
[Π(∂x , ∂x ) − Π(∂y , ∂y ) − 2iΠ(∂x , ∂y )]
=
2
Como Π(∂x , ∂x ) = e, Π(∂y , ∂y ) = g e Π(∂x , ∂y ) = f, temos que
1
e−g
2Π(∂z , ∂z ) = [e − g − 2if ] =
− if = φ.
2
2
o que mostra a Afirmação 7.
1
Sabemos também que ∂z = (z∂r − iz∂θ ), logo
2
1
1
φ = 2Π(∂z , ∂z ) = 2Π[ (z∂r − iz∂θ ), (z∂r − iz∂θ )]
2
2
11
= 2 Π(z∂r − iz∂θ , z∂r − iz∂θ )
22
1
=
[Π(z∂r , z∂r ) + Π(z∂r , −iz∂θ ) + Π(−iz∂θ , z∂r ) + Π(−iz∂θ , −iz∂θ )]
2
1 2
[z Π(∂r , ∂r ) − iz 2 Π(∂r , ∂θ ) − iz 2 Π(∂θ , ∂r ) + (−i)2 z 2 Π(∂θ , ∂θ )].
=
2
Para |z| = 1, temos que z 2 z 2 = |z|4 = 1, assim ficamos com
1
z 2 φ = [Π(∂r , ∂r ) − 2iΠ(∂r , ∂θ ) − Π(∂θ , ∂θ )],
2
e finalmente temos que
Im(z 2 φ) = −Π(∂r , ∂θ ).
Por outro lado, o vetor tangente unitário τ e o conormal unitário ν apontando
para dentro ao longo de ∂M são dados por
τ=
∂θ
|∂θ |
23
e
−∂r
.
|∂r |
Sabemos que ds2 = eρ |dz|2 , x = r cos θ e y = r sin θ. Assim, para r = 1, ficamos
ν=
com
dx = cos θdr − sin θdθ
e
dy = sin θdr + cos θdθ.
Portanto, |dz|2 = dx2 + dy 2 = dr2 + dθ2 , logo ds2 = eρ (dr2 + dθ2 ), o que nos leva
a
|∂r |2 = ds2 (∂r ) = eρ e |∂θ |2 = ds2 (∂θ ) = eρ ,
ou seja,
ρ
|∂r | = e 2
e
ρ
|∂θ | = e 2 ,
e assim teremos τ = e
−ρ
2
∂θ e ν = −e
−ρ
2
∂r.
Mas como Im(z 2 φ) = −Π(∂r , ∂θ ), então
Im(z 2 φ) = −Π(e
= −e
−ρ
2
−ρ
2
τ, −e
(−e
−ρ
2
−ρ
2
ν)
)Π(τ, ν)
= eρ Π(τ, ν).
De acordo com a Proposição 2.0.2 e sabendo que NΣ = a, temos que, ao longo de Γ,
ν = cosh βνΣ − a sinh β
e
N = − sinh βνΣ + a cosh β.
Assim, lembrando que
Π(v) = −hdN (v), vi
temos
Π(τ, ν) = −h∇0τ N, νi = h∇0τ ν, N i
= h∇0τ (cosh βνΣ − a sinh β), N i
= h∇0τ (cosh βνΣ ), N i − h∇0τ (a sinh β), N i
= cosh βh∇0τ νΣ , N i − sinh βh∇0τ a, N i
= cosh βh∇0τ νΣ , (− sinh βνΣ + a cosh β)i − sinh βh∇0τ a, (− sinh βνΣ + a cosh β)i
= cosh β[− sinh βh∇0τ νΣ , νΣ i + cosh βh∇0τ νΣ , ai] +
− sinh β[− sinh βh∇0τ a, νΣ i + cosh βh∇0τ a, ai].
24
Desse modo, obtemos
Π(τ, ν) = − cosh β sinh βh∇0τ νΣ , νΣ i + cosh2 h∇0τ νΣ , ai + sinh2 βh∇0τ a, νΣ i +
− cosh β sinh βh∇0τ a, ai.
(3.9)
Lembramos que
• NΣ = a é um campo vetorial unitário tipo-tempo, normal a Σ dirigido para o futuro;
• νΣ = NΣ ∧ τ é um vetor conormal unitário apontando para dentro de Ω ao longo da
curva Γ.
Mas a conexão ∇0 é compatı́vel com a métrica, ou seja,
XhY, Zi = h∇0X Y, Zi + hY, ∇0X Zi
onde X, Y, Z ∈ X (M ).
Se fizermos Y = Z, teremos que h∇0X Z, Zi =
teremos
h∇0τ νΣ , νΣ i =
X
hZ, Zi e fazendo Z = νΣ , X = τ,
2
τ
hνΣ , νΣ i,
2
e assim a equação (3.9) fica
τ
τ
τ
Π(τ, ν) = − cosh β sinh β hνΣ , νΣ i−cosh2 βhνΣ , ∇0τ ai+sinh2 β ha, νΣ i−cosh β sinh β ha, ai.
2
2
2
Mas sabemos que
τ hνΣ , νΣ i = τ ha, ai = 0,
ha, νΣ i = 0,
e
hνΣ , ∇0τ ai = 0,
logo
Π(τ, ν) = 0
Em outras palavras a função harmônica Im(z 2 φ) se anula em ∂D, e portanto de acordo
com o princı́pio do máximo terá que ser identicamente nula em D, o que implica que a
função holomorfa Ψ = z 2 φ, tem que ser constante em D. Observe que essa constante só
pode ser zero, pois Ψ(0) = z 2 φz=0 = 0, ou seja, Ψ ≡ 0, daı́ z 2 φ ≡ 0. Mas z ∈ D − {0}
então φ(z) = 0 em D e assim φ ≡ 0. Assim
e−g
2
− if = 0, o que nos leva a, e = g e f = 0,
ou seja, a imersão é totalmente umbı́lica.
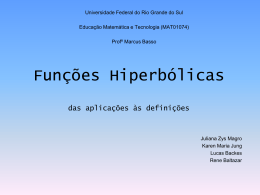
E isso finaliza a demostração do Teorema 3.0.5.
25
Figura 3.1.
Vamos agora ao segundo resultado de unicidade deste trabalho.
Teorema 3.0.6. As únicas superfı́cies estacionárias imersas em L3 com superfı́cie suporte hiperbólica são os discos planos,com H = 0 e as calotas hiperbólicas, com H 6= 0.
Prova. Podemos assumir, sem perda de generalidade, que a superfı́cie suporte é o plano
hiperbólico Σ = H2 definido por
H2 = {x ∈ L3 : hx, xi = −1, x3 ≥ 1 > 0}
e orientado por NΣ (x) = x, onde
L3+ = {x ∈ L3 : hx, xi ≤ −1, x3 ≥ 1 > 0}.
Como na prova do Teorema 3.0.5, o primeiro auxı́lio é ver que a superfı́cie é
topologicamente um disco. Seja x : M −→ L3 é uma imersão compacta tipo-espaço tal
que x(M ) ⊂ L3+ e x(∂M ) = Γ é uma curva contida em H2 cujo bordo é um domı́nio Ω.
Já que x(M ) ⊂ L3+ podemos projetar ortogonalmente a imersão sobre H2 e considerar a aplicação x̃ : int(M ) −→ H2 dada por
x̃(p) =
para todo p ∈ int(M ), onde |x(p)| =
1
x(p)
|x(p)|
p
−hx(p), x(p)i ≥ 1.
A aplicação x̃ é, de fato uma projeção sobre H2 , pois
26
x(p) x(p)
,
i
|x(p)| |x(p)|
1
=
hx(p), x(p)i
|x(p)|2
hx(p), x(p)i
=
−hx(p), x(p)i
= −1.
hx̃(p), x̃(p)i = h
Afirmação 8: x̃ satisfaz
1
dx̃ =
|x|
hdx, xi
dx +
x
|x|2
Prova da Afirmação 8: Seja α : (−, ) −→ int(M ) uma curva suave tal que α(0) = p e
α0 (0) = v. Então
x(α(t))
|x(α(t))|
x(α(t))
= p
−hx(α(t)), x(α(t))i
x̃(α(t)) =
= (−hx(α(t)), x(α(t))i)
−1
2
x(α(t)).
Dessa forma,
−3
dx̃
−1
= ( )(−hx(α(t)), x(α(t))i) 2 [−2hdx(α(t))α0 (t), x(α(t))i]x(α(t))
dt
2
1
+ p
dx(α(t))α0 (t)
−hx(α(t)), x(α(t))i
hdx(α(t))α0 (t), x(α(t))ix(α(t))
dx(α(t))α0 (t)
p
=
+p
.
(−hx(α(t)), x(α(t))i)3
−hx(α(t)), x(α(t))i
Assim, avaliando dx̃ em t = 0, temos que
dx̃ hdx(p)v, x(p)ix(p)
dx(p)v
+p
=p
t=0
dt
(−hx(p), x(p)i)3
−hx(p), x(p)i
Portanto
1
dx̃ =
|x|
hdx, xi
dx +
x ,
|x|2
e isso mostra a Afirmação 8.
1
h, i, onde h, iH2 denota a métrica
|x|2
em H2 . Isso mostra que x̃ é um difeomorfismo local e portanto, é uma aplicação aberta.
Decorre da Afirmação 8, que x̃∗ (h, iH2 ) ≥
Procedendo agora como no Lema 3.0.7, mostramos que x̃(int(M )) = Ω e que x̃ : M −→ Ω
27
é um difeomorfismo. Em particular, M é um disco topológico. Uma vez que sabemos
que M é um disco topológico, podemos parametrizá-lo por um disco unitário fechado D
e proceder como na prova do Teorema 3.0.5, e assim obter
Im(z 2 φ) = eρ Π(τ, ν).
No caso atual, NΣ (x) = x e, usando (2.3), teremos que, ao longo de Γ,
Π(τ, ν) = −h∇0τ N, νi
= cosh βh∇0τ νΣ , N i − sinh βhτ, N i.
Recorde que {τ, ν, N } é um triedro ortonormal, logo hτ, N i = 0,
e assim,
Π(τ, ν) = cosh βh∇0τ νΣ , N i
= − cosh β sinh βh∇τ νΣ , νΣ i + cosh2 βh∇τ νΣ , xi
1
= − cosh β sinh β (hνΣ , νΣ i) − cosh2 βhνΣ , τ i
2
= 0.
Concluimos então a prova do Teorema 3.0.6, do mesmo modo como provamos o Teorema
3.0.5.
Figura 3.2.
Capı́tulo 4
Algumas considerações sobre o caso
n-dimensional
Neste cápitulo discutiremos um pouco a respeito do problema abordado nesta
dissertação, mas no caso n-dimensional. O objetivo aqui será conjecturar os teoremas
principais do presente trabalho em dimensão n.
Vejamos então algumas considerações sobre o caso geral de hipersuperfı́cies tipoespaço de dimensão n, no espaço de Minkowski Ln+1 de dimensão n + 1.
Podemos começar com o problema variacional, que nos capı́tulos 2 e 3 deste
trabalho foi discutido no caso de dimensão 2. É claro que podemos facilmente estender
o problema para o caso geral,ou seja, dimensão n, com pequenas modificações, conforme
exposto a seguir.
Denote por Σn uma hipersuperfı́cie tipo-espaço conexa imersa em Ln+1 orientada
por NΣ , e assuma que Σn divide Ln+1 em duas componentes conexas. Denotaremos por
Ln+1
a componente conexa para a qual NΣ está apontando.
+
Seja x : M n −→ Ln+1 uma imersão tipo-espaço suave de uma variedade compacta
M n de dimensão n, com bordo não vazio ∂M, orientada por N e tal que
x(int(M )) ⊂ Ln+1
+
e
x(∂M ) = Γn−1 ⊂ Σn .
é uma variedade fechada de dimensão n − 1 contida em Σn cujo bordo é um domı́nio
compacto Ω ⊂ Σn ,
Podemos então considerar uma variação admissı́vel Xt , de x, t ∈ (−, ) e definir
um correspondente funcional energia E : (−, ) −→ R por
E(t) = A(t) − cosh βS(t),
onde A(t) e S(t) são agora as áreas n-dimensionais.
28
29
O funcional volume da variação é dado por
Z
V (t) =
X ∗ (dV ),
[0,t]×M
onde dV é agora o elemento canônico de volume de dimensão n + 1 de Ln+1 .
A primeira variação do funcional energia é agora dada por
Z
I
δξ E = −n
Hhξ, N idA +
hξ, νΣ i(cosh β + hN, NΣ i)ds,
M
∂M
onde dA e ds denotam, respectivamente, o elemento de área de dimensão n de M n e o
elemento de área de dimensão n − 1 de ∂M, ξ é a variação do campo de vetores e νΣ é o
vetor conormal unitário apontando para dentro de Ω ⊂ Σn ao longo de Γn−1 .
Para a primeira variação de volume, teremos
Z
hξ, N idA
δξ V = −
M
Isso implica que δξ E = 0 para toda variação admissı́vel de x que preserva volume, se e
somente se, a curvatura média H de x é constante e cosh β = −hN, NΣ i ao longo de Γn−1 .
Portanto, para dimensão n as imersões estacionárias deste problema variacional podem ser caracterizadas como as hipersuperfı́cies tipo-espaço, com curvatura média
constante em Ln+1 , que intersectam Σn sob um ângulo hiperbólico constante.
Alı́as e Pastor [1998], generalizaram para o caso de dimensão n e previram o
resultado de unicidade para superfı́cies tipo-espaço com curvatura média constante em
L3 com bordo circular fixo, obtido juntamente com López em [ALP] exatamente um ano
antes de [AP1].
Recentemente eles provaram que as únicas hipersuperfı́cies tipo-espaço compactas
imersas em Ln+1 , com curvatura média constante H e limitada por uma esfera de dimensão
n − 1 são as bolas hiperplanares com (H = 0) e as calotas hiperbólicas com (H 6= 0).
Essa prova foi consequência de duas fórmulas integrais a fórmula do fluxo e a
desigualdade integral. A versão de dimensão 2 dessas fórmulas pode ser encontrada em
[AP1], usando essencialmente o fato de a superfı́cie carregar uma estrutura complexa e o
bordo ∂M ser uma curva.
Para os resultados encontrados aqui neste trabalho, seria desejável estendê-los ao
caso de dimensão n, ou pelo menos ao caso de dimensão 3, que naturalmente seria de
grande interesse do ponto de vista fı́sico.
Pode-se enunciar as duas conjecturas seguintes
Conjectura 1.Assuma que a hipersuperfı́cie suporte Σn seja um hiperplano tipoespaço. Então as únicas hipersuperfı́cies estacionárias imersas em Ln+1 são as bolas
hiperplanares, com H = 0, e as calotas hiperbólicas, com H 6= 0.
30
Conjectura 2. Assuma que a hipersuperfı́cie suporte Σn é o espaço hiperbólico
de dimensão n. Então as únicas hipersuperfı́cies estacionárias imersas em Ln+1 são as
bolas hiperplanares, com H = 0, e as calotas hiperbólicas, com H 6= 0.
Entretanto, a técnica usado por nós para provar a versão bidimensional somente
tem resultado para n = 2, já que fazemos o uso essencial da estrutura complexa da
superfı́cie como superfı́cie de Riemann. Uma outra pergunta interessante a ser considerada
seria a respeito da estabilidade do problema variacional no caso geral.
Mas esse é um assunto que fica para outra opotunidade.
Referências
[ALP] Alı́as, L. J.; López, R.; Pastor, J. A. Compact Spacelike Surfaces with Constant
Mean Curvature in the Lorentz-Minkowisk 3-space, Tôhoku Math. J., v. 50, p. 491501, 1998.
[AP1] Alı́as, L. J.; Pastor, J. A. Constant Mean Curvature Spacelike Hypersurfaces with
Spherical Boundary in the Lorentz-Minkowski space, J. Geom. Phys., v. 28, p. 85-93,
1998.
[AP2] Alı́as, L. J.; Pastor, J. A. Spacelike surfaces of constant mean curvature with free
boundary in the Minkowski space. Class. Quantum Grav., v. 16, p. 1323-1331, 1999.
[BdC] Barbosa, J. L.; do Carmo, M. P. Stability of Hypersurfaces with Constant Mean
Curvature, Math. Z., v. 185, p. 339-353, 1984.
[BO1] Barbosa, J. L.; Oliker, V. Spacelike Hypersurfaces with Constant Mean Curvature
in Lorentz space, Mat. Contemp., v. 4, 27-44, 1993b.
[BO2] Barbosa, J. L.; Oliker, V. Stable Spacelike Hypersurfaces with constant mean Curvature in Lorentz Space, Geometry and Global Analysis (Sendai), Tôhoku University,
p. 161-164, 1993a.
[BF] Brill,
D.;
Flaherty,
F. Isolated Maximal Surfaces in Spacetime,
Com-
mun.Math.Phys., v. 50, 157-165, 1976.
[dC1] do Carmo, M. P. Geometria Riemanniana. Rio de Janeiro: IMPA, 1988. (Projeto
Euclides).
[dC2] do Carmo, M. P.Geometria Diferencial de Curvas e Superfı́cies. Rio de Janeiro:
SBM, 2005. (Textos Universitários).
[F] Finn, R. Equilibrium Capillary Surfaces. New York: Springer, 1986.
[KN] Kobayashi, S.; Nomizu K. Foundations of Differential Geometry, v. 2, New York:
Interscience, 1969.
31
32
[P] Palmer, B. Spacelike Constant mean Curvature Surfaces Pseudo-Riemannian Space
Forms, Ann. Global Anal.Geom., v. 8, 217-226, 1990.
[RS] Ros, A.;Souam R. On Stability of surfaces in a ball, Pacific J.Math, v. 178, 345-361,
1997.
[RV] Ros, A. Vergasta, E.; Stability for Hypersurfaces of constant Mean Curvature With
Free Boudary, Geometricae Dedicata, v. 56, 19-33, 1995.
Baixar