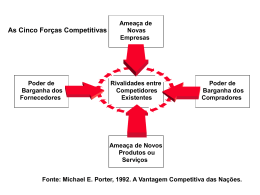
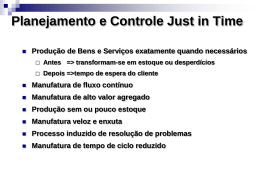
AUTOMAÇÃO E ROBÓTICA Mário Luiz Tronco ROBÔ Manipulador programável, multifuncional, projetado para manipular materiais, peças, ferramentas ou dispositivos especiais através de movimentos programáveis, para executar tarefas variáveis. Tipos Principais: - Manipuladores Mecânicos (Pick and Place) Tarefas específicas: realizam movimentos determinados, para a realização de funções tais como carga e descarga de máquinas, transporte de peças, embalagem e distribuição. - Robôs Programáveis Agrupados em gerações, de acordo com a capacidade de programação, realimentação e sensoreamento. ROBÔS PROGRAMÁVEIS Permitem um controle contínuo de trajetória, ponto a ponto, gerando posicionamento preciso, com repetibilidade São utilizados em substituição às operações manuais, tais como furação, pintura e montagem automatizada. AUTOMAÇÃO DA MANUFATURA • Automação do "Chão-de-Fábrica” • Automação de Engenharia • Automação no Planejamento e Controle. No nível de "Chão-de-Fábrica” Sistemas de Computadores: No Auxílio à Manufatura CAM - Computer Aided Manufacturing No Controle de Qualidade CAQC - Computer Aided Quality Control Ferramentas de Controle Estatístico de Processos (CEP) CAM origina-se do desenvolvimento do processamento de informações, especialmente para o controle de máquinas ferramentas, representa a automação de uma indústria no nível de "Chão-de-Fábrica", através do uso de Células e Sistemas Flexíveis de Manufatura Manufatura Integrada por Computador (CIM - Computer Aided Manufacturing) uso da tecnologia de computadores ligando todas as funções relacionadas à manufatura de um produto, caracterizando-se como um sistema de informação e controle de manufatura Benefícios da implementação do conceito de CIM: Mudanças na Estrutura de Custos - substituição do trabalho humano pelas máquinas - redução de custos variáveis; Aumento da Repetibilidade dos Processos, o qual tem impacto competitivo - redução do trabalho de correção - melhoria de desempenho dos produtos; Redução de Inventários - redução de tempo de montagem - redução da necessidade de estoques; Aumento da Flexibilidade - rápidas trocas de ferramentas e equipamentos - mudanças rápidas de produtos, em resposta às variações de demanda de mercado; Benefícios Redução do Tempo de Trânsito entre as estações de processamento - redução de distâncias de movimentação de materiais - otimização das rotas a serem seguidas pelos mesmos. CIM - Níveis Hierárquicos NÍVEL 3 MATRIZ CLIENTES MARKETING NÍVEL 2 SISTEMAS DE AUTOMAÇÃO SISTEMA GERENCIADOR DE OPERAÇÕES NÍVEL 1 CONTROLE DE CHÃO DE FÁBRICA ROTEAMENTO DE MATERIAIS CONTROLE DE QUALIDADE CIM - Níveis de Integração NÍVEL 1: Hardware padrão, normalmente controlado por computadores existentes nas máquinas ou por controladores programáveis. AGV`s, máquinas ferramentas NC, robôs, além de outros equipamentos que fazem uso limitado de informações locais NÍVEL 2: Grupos celulares de equipamentos e materiais para a produção de famílias de peças, através de um elevado grau de integração e comunicação Obtido através do agrupamento celular de diversos equipamentos individuais do nível 1 - realizando diversas funções, utilizando-se das potencialidades do sistema integrado de informações NÍVEL 3: Conexão de diversas Células do nível 2, formando ilhas, através da utilização de Redes de Comunicação. A principal característica das ilhas é a flexibilidade NÍVEL 4: Representa a integração total. Grandes redes de informações interligam todas as funções de manufatura. Inclui sistemas de nível 3, além de equipamentos de transporte e níveis de gerenciamento. Este nível de integração representa o conceito de CIM Células Flexíveis de Manufatura Utilizadas na produção de peças individuais ou pequenos lotes de peças Realizam todas as funções necessárias para completar o processo de produção da peça programada. São muito versáteis quanto a variações no tipo de peças fabricadas, dependendo de programação de seus elementos componentes para alterações no processo produtivo. ADVANCED ANSP SHASTA NORTEL Servidor de Aplicações - Manufatura Virtual - Robótica - Projeto Interativo (Video/Voz/Dados) - Fabricação (Célula Flexível) Switch Multiserviço Microcomputador Gerente de Célula (CAM) AGV Servidor - Vídeo - Audio TORNO CNC ROBÔ Sistema Flexível de Manufatura (FMS) Composto por estações de processamento interligadas por sistemas automatizados de manipulação e de carga/descarga de materiais, permitindo a produção de volumes variáveis de peças diferentes. Sistema Automático de Manipulação de Materiais Veículos Comandados (AGV’s); Transportadores; Robôs; Dispositivos de Armazenamento Automatizado. AGV’s ROBÔS no contexto de Sistemas Flexíveis de Manufatura •Acionamento e Controle - Servomotores - Sensores • Operação - Visão Artificial - Navegação - Teleoperação •Integração • Modelagem e Simulação Acionamento e Controle Servomotores DC/AC Sensores: - Força - Posição/Velocidade (encoders) - Câmeras - Proximidade Indutivos/Capacitivos - Ultra-som (Distância) Visão Artificial: - Reconhecimento de Peças - Navegação - Redes Neurais ROBÔ Teleoperação Browser WWW Solicitações de Serviços Dados/Imagens Comandos Servidor WWW Equipamento Teleoperado Dados de Posicionamento/ Status de Operação Modelagem e Simulação Modelo Dinâmico - Estudo matemático do comportamento do robô, em relação às suas características construtivas - Posicionamento: - Torque - Forças nas juntas/atrito - Capacidade de Carga/Repetibilidade - outras z0 1 z1 y0 2 z2 y1 x0 x1 y2 3 x2 d2 z3 L1 L2 d3 y3 4 x3 z4 y4 x4 Análise Cinemática Estudo analítico do movimento do braço do robô em relação a um sistema de coordenadas de referência, como função do tempo e sem levar em conta as forças e torques envolvidos no movimento. Manipulação de Matrizes Expressão para o sistema de coordenadas da garra em relação ao sistema da base Comportamento dinâmico: Estudo do movimento em relação aos torques aplicados pelos atuadores ou por forças externas aplicadas ao manipulador Torque nas juntas Modelos para Simulação - Modelagem Geométrica - Ferramentas de Simulação de operação
Baixar