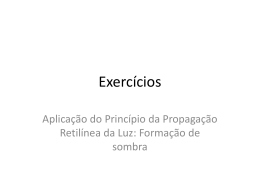
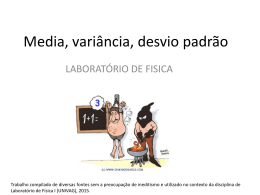
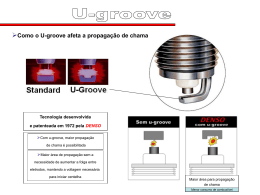
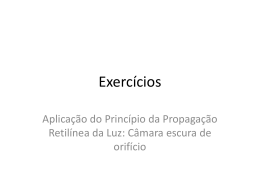
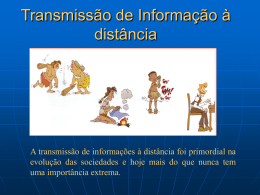
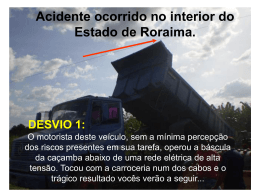
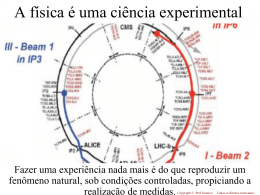
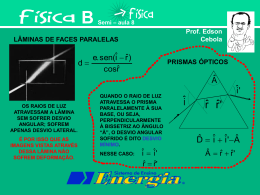
Capítulo 9 Processamento dos dados 9.1 Propagação não estatística de erros Suponhamos que é possível estabelecer uma relação de proporcionalidade directa (ver secção3.2) entre duas variáveis. Por exemplo, o preço de uma habitação (y, variável dependente) é directamente proporcional à área de construção (x, variável independente): y = a1 x Podemos assumir que a ordenada na origem será nula porque quando a área tender para zero, o preço tenderá obviamente para zero também. Se tivermos em conta as unidades de y ([y] = €) e de x [x] = m2 podemos facilmente concluir que a1 representa o preço por unidade de área €/m2 (ver secção 4.5). y/k€ 4 y=x 3 δy1 2 y=0.2x 1 δy2 0 1 2 3 4 x/m2 δx Figura 9.1: Impacto de uma variação unitária da variável independente (x) sobre a variável dependente (y) para uma relação linear 43 9.1. PROPAGAÇÃO NÃO ESTATÍSTICA DE ERROS CAPÍTULO 9. PROCESSAMENTO DOS DADOS Na figura 9.1 é apresentada uma representação gráfica da relação entre a área de construção e o preço em duas zonas diferentes. A azul temos uma zona de construção mais cara 1k€/m2 e a vermelho uma zona de construção mais barata 200 €/m2 . Se ao fazer-se a medição da área de construção houver uma discrepância entre o valor medido e o real, haverá uma maior repercussão no preço para quem estiver a construír na zona mais cara (desde que o erro de área seja o mesmo). Por exemplo, se o valor de área medido for maior em x = 1 m2 do que o valor real, quem construír na zona azul terá um prejuízo de y1 = 1 k€ enquanto que quem construír na zona vermelha terá um prejuízo de y2 = 200 €! Diz-se que a discrepância na medição da área propagou-se até ao preço. É claro que a discrepância propagada não depende só da zona (declive da recta). Dentro da mesma zona terá maior prejuízo o construtor que tiver sobrevalorizado mais a área. Do ponto de vista matemático podemos então concluir que: . quanto maior for o declive da recta de y (variável dependente) em função de x (variável independente), maior será a discrepância da variável dependente ( y). . quanto maior for a discrepância cometida ao avaliar a variável independente ( x), maior será a discrepância da variável dependente ( y). Podemos então esboçar uma primeira tentativa de estimar a discrepância da variável dependente em função das grandezas de que depende: (9.1) y = a1 x O declive de ⇣ uma ⌘ recta em geral é dado pela derivada da variável dependente em ordem à variável dy independente dx . Isto implica que a equação (9.1) pode ser modificada para: y= dy x dx (9.2) Nesta secção começou-se por descrever um situação de discrepância na medição da variável independente (e.g. sabia-se que a área medida tinha sido sobrevalorizada em 1 m2 ). Na prática, não sabemos se um valor medido subvaloriza ou sobrevaloriza o valor real porque isso implicaria o conhecimento deste. Mas nem tudo está perdido. Suponhamos que de alguma forma conseguimos descobrir um limite máximo do erro da medição da variável independente 4xM ax . Em linguagem matemática, existe um majorante do erro de x. Podemos modificar a equação (9.2) para determinar o erro máximo que a variável dependente 4yM ax poderá tomar: 4yM ax = dy 4xM ax dx (9.3) As alterações efectuadas foram: . substituíu-se o termo discrepância ( y) pelo termo erro (4y). . a derivada ⇣ dy dx ⌘ foi substituída pelo seu módulo dy dx . Como sabemos dos capítulos 5, 6 e 7 a discrepância e o erro são bem diferentes. A discrepância é bem definida e pode tomar um valor positivo ou negativo. O erro é por definição uma medida de incerteza. Ou seja, o erro não tem sinal. Uma vez que a derivada pode tomar valores negativos teve que se tomar o seu módulo. Para uma função f (x1 , . . . , xN ) de N variáveis independentes, a equação geral do majorante do erro é dada por: f (x1 , . . . , xN ) = N ✓ X @f · @xi i=1 44 xiM ax ◆ (9.4) CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.2 Casos particulares 9.2.1 Adição 9.2. CASOS PARTICULARES A adição de duas medições experimentais tem um erro absoluto máximo dado por: (x1 + x2 ) = x1 + (9.5) x2 Por exemplo, consideremos dois objectos com comprimentos conhecidos. O objecto A tem um comprimento de 9.500 mm e o objecto B tem um comprimento de 7.500 mm. Pretende-se avaliar qual é o comprimento total dos dois objectos a partir da medição individual dos mesmos. Se a medição for feita com a régua da figura o resultado das medições será: (10.0 ± 0.5) mm para o objecto A e(8.0 ± 0.5) mm para o objecto B. Ou seja, ambos os valores foram arredondados por excesso. 9.500 mm 9 mm 7.500 mm 10 mm 7 mm A 8 mm B Figura 9.2: Soma de erros máximos do aparelho A estimativa da soma dos comprimentos dos objectos será de 18.0 mm e o valor real é 17.000 mm. O exemplo foi escolhido para ilustrar a pior situação possível de arredondamento e mostrar que nessa situação o erro de arredondamento total será de 1.0 mm. Logo o majorante do erro da soma é de 1 mm e o resultado da soma dos valores experimentais será: (10.0 ± 0.5) mm + (8.0 ± 0.5) mm = (18 ± 1) mm 9.2.2 Subtracção A subtracção de duas medições experimentais tem um erro absoluto máximo dado por: (x1 x2 ) = x1 + x2 (9.6) Podemos exemplificar com os objectos da figura 9.2. O objecto A tem um comprimento de 9.500 mm e o objecto B tem um comprimento de 7.500 mm. Suponhamos que na medição com a régua da figura o resultado das medições foi: (10.0 ± 0.5) mm para o objecto A e(7.0 ± 0.5) mm para o objecto B porque este parecia estar mais perto da divisão dos 7 mm. Ou seja, o primeiro valor foi arredondado por excesso e o segundo por defeito. Pretende-se avaliar qual é a diferença de comprimento entre os dois objectos a partir da medição individual dos mesmos. A estimativa da diferença dos comprimentos dos objectos será de 3.0 mm e o valor real é 2.000 mm. Nesta situação limite o erro total de arredondamento foi de 1.0 mm. Podemos então concluír que o majorante do erro da diferença é de 1 mm e o resultado da subtracção dos valores experimentais será: (10.0 ± 0.5) mm 9.2.3 (7.0 ± 0.5) mm = (3 ± 1) mm Produto O produto de duas medições experimentais tem um erro relativo máximo dado por: (x1 x2 ) x1 x2 = + x1 x2 x1 x2 45 (9.7) 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.2.4 Divisão A razão entre duas medições experimentais tem um erro relativo máximo dado por: (x1/x2 ) x1/x2 9.2.5 = x1 x2 + x1 x2 (9.8) Potenciação A potência de grau n de uma medição experimental tem um erro relativo máximo dado por: x1 (xn1 ) = n n x1 x1 9.2.6 (9.9) Produto de potências O produto das potências de duas medições experimentais (uma de grau n e a outra de grau m) tem um erro relativo máximo dado por: (xn1 xm x1 x2 2 ) = n + m xn1 xm x x 1 2 2 9.2.7 (9.10) Exponencial A exponencial de uma medição experimental tem um erro relativo máximo dado por: (e↵x1 ) = |↵ x1 | e↵x1 9.2.8 (9.11) Logaritmo O logaritmo de uma medição experimental tem um erro absoluto máximo dado por: (ln ↵x1 ) = 9.3 x1 x1 (9.12) Propagação estatística de erros Quando a variação de uma grandeza é resolúvel (ver a subsecção6.3.1) é possível que o erro padrão seja superior ao erro máximo do aparelho. Neste caso o erro experimental passa a ser o erro padrão (ou seja, um erro estatístico). A variável medida pode ser representada por uma distribuição normal. Como consequência, qualquer operação realizada sobre uma ou mais variáveis pode ser vista como uma operação realizada sobre uma ou mais distribuições normais. Nas subsecções abaixo fizeram-se simulações de operações sobre variáveis que seguem uma distribuição normal. Foram gerados pseudo-aleatoriamente com uma distribuição normal [7] 15000 valores para cada uma das variáveis iniciais x1 e x2 . 9.3.1 Adição A adição de duas variáveis com distribuição normal resulta numa nova variável com distribuição normal: 46 CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS Figura 9.3: Soma de x1 ⇠ N (3.0000, 0.1000) com x2 ⇠ N (2.0000, 0.1000) A largura (e.g. desvio padrão) da distribuição resultante é maior do que a largura de qualquer das distribuições iniciais. Nesta simulação a média da soma foi de 4.9996 e o desvio padrão de 0.1426. Se aumentasse ainda mais o número de valores de x1 e x2 , o desvio padrão iria tender para 0.1414. Porquê este valor? Observa-se que os quadrados dos desvios padrão são aditivos ou seja: 2 (x1 + x2 ) = 2 (x1 ) + 2 (x2 ) (9.13) e por isso: p (x1 + x2 ) = 0.10002 + 0.10002 = r 2 = 0.1414 100 A discrepância do desvio padrão da soma foi de +0.02%. Tendo em conta que o erro padrão não passa de um desvio padrão (ver a secção 5.4) podemos então naturalmente inferir que o erro da soma será dado por: (x1 + x2 ) = q 2 2 ( x1 ) + ( x2 ) (9.14) Tal como na equação (9.5) o erro da soma é calculado a partir dos erros absolutos das parcelas. Nesta simulação observou-se também que a média da soma (4.9996) tende para a soma das médias de x1 e x2 (5.0000). A discrepância foi de 0.01%. 9.3.2 Subtracção Tal como aconteceu para a adição, a subtracção de duas variáveis com distribuição normal resulta numa nova variável com distribuição normal: 47 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS CAPÍTULO 9. PROCESSAMENTO DOS DADOS Figura 9.4: Subtracção entre x1 ⇠ N (3.0000, 0.1000) e x2 ⇠ N (2.0000, 0.1000) A largura (e.g. desvio padrão) da distribuição resultante também é maior do que a largura de qualquer das distribuições iniciais. Nesta simulação a média da subtracão foi de 0.9991 e o desvio padrão de 0.1412. Se aumentasse ainda mais o número de valores de x1 e x2 , o desvio padrão iria tender para 0.1414. Ou seja, do ponto de vista da largura da distribuição resultante, não existe diferença entre a distribuição da soma e da subtracção: (x1 x2 ) = q 2 ( x1 ) + ( x2 ) A discrepância do desvio padrão da subtracção foi de 2 (9.15) 0.02%. Tal como na equação (9.6) o erro da subtracção é calculado a partir dos erros absolutos das parcelas. Nesta simulação observou-se também que a média da diferença (0.9991) tende para a diferença das médias de x1 e x2 (1.0000). A discrepância foi de 0.09%. 9.3.3 Produto O produto de duas variáveis com distribuição normal resulta numa nova variável com distribuição normal: 48 CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS Figura 9.5: Produto entre x1 ⇠ N (3.0000, 0.1000) e x2 ⇠ N (2.0000, 0.1000) Ao contrário do que acontece para a adição e a subtracção, a largura (e.g. desvio padrão) da distribuição do produto não é necessariamente maior que a largura de qualquer das distribuições iniciais. No caso desta simulação a média do produto foi de 5.9995 e o desvio padrão de 0.3632. Se aumentasse ainda mais o número de valores de x1 e x2 , o desvio padrão iria tender para 0.3606. De onde vem este valor? Observa-se que para o produto, os quadrados dos desvios padrão relativos são aditivos ou seja: ✓ (x1 · x2 ) x1 · x2 ◆2 = ✓ (x1 ) x1 ◆2 + ✓ (x2 ) x2 ◆2 (9.16) e por isso: (x1 · x2 ) = 6.0000 s✓ 0.1000 3.0000 ◆2 + ✓ 0.1000 2.0000 ◆2 = r 13 = 0.3606 100 A discrepância do desvio padrão do produto foi de +0.04%. Tendo em conta que o erro padrão não passa de um desvio padrão (ver a secção 5.4) podemos então naturalmente inferir que o erro da soma será dado por: (x1 x2 ) = x1 x2 s✓ x1 x1 ◆2 + ✓ x2 x2 ◆2 (9.17) Note-se que tal como na equação (9.7) o erro do produto é calculado a partir dos erros relativos dos factores. Nesta simulação observou-se também que a média do produto (5.9995) tende para o produto das médias de x1 e x2 (6.0000). A discrepância foi de 0.01%. 9.3.4 Divisão A divisão de duas variáveis com distribuição normal resulta numa nova variável com distribuição normal: 49 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS CAPÍTULO 9. PROCESSAMENTO DOS DADOS Figura 9.6: Divisão entre x1 ⇠ N (3.0000, 0.1000) e x2 ⇠ N (2.0000, 0.1000) Na divisão também é possível que a largura (e.g. desvio padrão) da distribuição final não seja maior que a largura de qualquer das distribuições iniciais. Foi exactamente o que aconteceu nesta simulação, a média da divisão foi de 1.5032 e o desvio padrão foi de 0.0907. Tal como para o produto, os quadrados dos desvios padrão relativos são aditivos: ✓ (x1/x2 ) x1/x2 ◆2 = ✓ (x1 ) x1 ◆2 + ✓ (x2 ) x2 ◆2 (9.18) logo nesta simulação o valor assintótico do desvio padrão é: (x1/x2 ) s✓ = 1.5000 0.1000 3.0000 ◆2 + ✓ 0.1000 2.0000 ◆2 = r 13 = 0.0901 1600 A discrepância do desvio padrão da divisão foi de +0.04%. Tendo em conta que o erro padrão não passa de um desvio padrão (ver a secção 5.4) podemos então naturalmente inferir que o erro da soma será dado por: (x1/x2 ) = x1/x2 s✓ x1 x1 ◆2 + ✓ x2 x2 ◆2 (9.19) Podemos notar novamente que tal como na equação (9.8) o erro da divisão é calculado a partir dos erros relativos dos factores. Nesta simulação observou-se também que a média da razão (1.5032) tende para a razão entre as médias de x1 e x2 (1.5000). A discrepância foi de +0.21%. 9.3.5 Potenciação A potenciação de uma variável com distribuição normal resulta numa nova variável com distribuição também normal: 50 CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS Figura 9.7: Quadrado (potência de ordem 2) de x1 ⇠ N (3.0000, 0.1000) É possível que a largura (e.g. desvio padrão) da distribuição final seja menor que a largura da distribuição inicial. No caso desta simulação a média da potência foi de 9.0061 e o desvio padrão de 0.6043. Na potenciação, o quadrado do desvio padrão relativo é igual (a menos da constante multiplicativa n2 ) ao quadrado do desvio padrão relativo da variável inicial: ✓ (xn1 ) xn1 ◆2 = ✓ n (x1 ) x1 ◆2 (9.20) por isso, nesta simulação o desvio padrão tenderá para: (xn1 ) = 3.0000 2 s✓ 0.1000 2 3.0000 ◆2 = 3.00002 ⇥ 2 0.1000 = 0.6000 3.0000 A discrepância do desvio padrão da potência foi de +0.05%. Tendo em conta que o erro padrão não passa de um desvio padrão (ver a secção 5.4) podemos então naturalmente inferir que o erro da soma será dado por: (xn1 ) = xn1 s✓ x1 n x1 ◆2 = n x1 x1 (9.21) Podemos notar novamente que tal como na equação 9.9 o erro da divisão é calculado a partir de um erro relativo. Se juntarmos este facto ao de que a potenciação é apenas um ou mais produtos sucessivos, esta semelhança poderá levar à ideia de que a equação 9.21 poderia também ser escrita (inspirada na equação 9.17) da seguinte forma: (xn1 ) = xn1 (x1 x1 . . . x1 ) = x1 x1 . . . x1 51 s ✓ ◆2 x1 n x1 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS CAPÍTULO 9. PROCESSAMENTO DOS DADOS Esta equação está ERRADA porque a equação 9.17 refere-se a uma multiplicação de variáveis independentes. Ora, x1 não é com certeza independente de si própria! Nesta simulação observou-se também que a média da distribuição da potência (9.0061) tende para a potência da média de x1 (9.0000). A discrepância foi de +0.07%. 9.3.6 Produto de potências O produto de potências de variáveis com distribuição normal resulta numa nova variável com distribuição também normal: Figura 9.8: Produto do quadrado (potência de ordem 2) de x1 ⇠ N (3.0000, 0.1000) por (potência de ordem 1) de x2 ⇠ N (2.0000, 0.1000) Neste caso também é possível que a largura (e.g. desvio padrão) da distribuição final seja menor que a largura de qualquer das distribuições iniciais. Nesta simulação, a média do produto de potências foi de 18.0151 e o desvio padrão foi de 1.5168. Observa-se que o quadrado do desvio padrão relativo do produto de potências é uma combinação linear dos quadrados dos desvios padrão relativos das variáveis iniciais em que os coeficientes são n2 e m2 : ✓ (xn1 xm 2 ) xn1 xm 2 ◆2 = ✓ n (x1 ) x1 ◆2 ✓ ◆2 (x2 ) + m x2 (9.22) por isso, nesta simulação o desvio padrão tenderá para: (xn1 xm 2 ) 2 = 3.0000 · 2.0000 1 s✓ 0.1000 2 3.0000 ◆2 ✓ 0.1000 + 1 2.0000 ◆2 = r 225 = 1.5000 100 A discrepância do desvio padrão do produto de potências foi de +0.09%. Tendo em conta que o erro padrão não passa de um desvio padrão (ver a secção 5.4) podemos então naturalmente inferir que o erro da soma será dado por: (xn1 xm 2 ) = n m x1 x2 s✓ x1 n x1 52 ◆2 ✓ x2 + m x2 ◆2 (9.23) CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS Podemos notar novamente que tal como na equação 9.10 o erro do produto de potências é calculado a partir dos erros relativos dos factores e respectivos expoentes. Mais uma vez observou-se que a média da distribuição do produto de potências (18.0151) tende para o produto das potências das médias de x1 e x2 (18.0000). A discrepância foi de +0.08%. 9.3.7 Exponencial A exponencial de um variável com distribuição normal tem também uma distribuição normal: Figura 9.9: Exponencial de x1 ⇠ N (3.0000, 0.1000) Neste caso também é possível que a largura (e.g. desvio padrão) da distribuição final seja menor que a largura da distribuição inicial. Nesta simulação, a média da exponencial foi de 20.1740 e o desvio padrão foi de 2.0386. Observa-se que o quadrado do desvio padrão relativo da exponencial é igual (a menos da constante multiplicativa ↵2 ) ao desvio padrão da variável inicial: ✓ (e↵x1 ) e↵x ◆2 = (↵ (x1 )) 2 (9.24) nesta simulação o desvio padrão tenderá então para: (e↵x1 ) = e3.000 ⇥ 1 ⇥ 0.1000 = 2.0086 A discrepância do desvio padrão da exponencial foi de +0.15%. Tendo em conta que o erro padrão não passa de um desvio padrão (ver a secção 5.4) podemos então naturalmente inferir que o erro da soma será dado por: (e↵x1 ) = e↵x1 q 2 (↵ x1 ) = |↵ x1 | (9.25) Ao contrário dos casos anteriores temos uma “mistura” de tipos de erro: temos um erro relativo calculado a partir de um erro absoluto (tal como na equação 9.11). Observou-se também que a média da distribuição da exponencial (20.1740) tende para a exponencial da média de x1 (20.0855). A discrepância foi de +0.44%. 53 9.3. PROPAGAÇÃO ESTATÍSTICA DE ERROS CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.3.8 Logaritmo O logaritmo de um variável com distribuição normal tem também uma distribuição normal: Figura 9.10: Logaritmo de x1 ⇠ N (3.0000, 0.1000) Neste caso também é possível que a largura (e.g. desvio padrão) da distribuição final seja menor que a largura da distribuição inicial. Foi o que aconteceu nesta simulação. A média do logaritmo foi de 1.0978 e o desvio padrão foi de 0.0336. Observa-se um comportamento inverso ao de uma exponencial: o quadrado do desvio padrão do logaritmo é igual (a menos da constante multiplicativa ↵2 ) ao desvio padrão relativo da variável inicial: 2 (ln ↵x1 ) = ✓ (x1 ) x1 ◆2 (9.26) nesta simulação o desvio padrão tenderá então para: (ln ↵x1 ) = 0.1000 = 0.0333 3.0000 A discrepância do desvio padrão do logaritmo foi de +0.02%. (ln ↵x1 ) = s✓ x1 x1 ◆2 = x1 x1 (9.27) Tal como para a exponencial temos uma “mistura” de tipos de erro mas na ordem inversa: temos um erro absoluto calculado a partir de um erro relativo (tal como na equação 9.12). Observou-se também que a média da distribuição do logaritmo (1.0978) tende para o logaritmo da média de x1 (1.0986). A discrepância foi de 0.07%. 9.3.9 Exemplos numéricos de propagação de erros ver secção 54 CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.4. QUE TIPO DE PROPAGAÇÃO UTILIZAR? 9.3.10 Caso geral A ideia subjacente à propagação estatística de erros é semelhante à ideia apresentada na secção 9.1 para a propagação não estatística de erros. Ou seja, o erro da função f depende da forma como esta varia com as variáveis xi . No entanto há uma diferença fundamental: no final do cálculo obtemos um erro padrão em vez de um majorante do erro. Logo, numa propagação estatística de erro TODOS os termos xi terão que ser erros padrão. Em vez de uma soma de erros máximos passamos a ter neste caso uma raíz quadrada da soma de quadrados de erros padrão: v uN ✓ ◆2 uX @f f (x1 , . . . , xN ) = t · xi (9.28) @xi i=1 9.4 Que tipo de propagação utilizar? O erro obtido pelo método estatístico (equação 9.28) será sempre menor que o obtido pelo método não estatístico (equação 9.4), logo o primeiro permite estreitar o intervalo que contém o valor real da grandeza. A única desvantagem é que no método estatístico existe uma probabilidade não nula (ainda que pequena) do valor real da grandeza estar fora do intervalo de confiança. Mesmo assim, essa probabilidade é quantificável. Pesados os prós e os contras, podemos distinguir 3 situações principais: 9.4.1 Uma medição Uma medição única de uma grandeza é sempre incompleta. Não existe informação sobre a sua precisão (não existe uma estimativa do desvio padrão) logo o erro padrão é desconhecido. A medição única deve ser SEMPRE EVITADA (espero que esse facto se torne ainda mais claro nas subsecções abaixo). Há porém situações em que uma segunda medição não é possível ou é muito difícil de conseguir. Neste caso o único erro disponível é o majorante do erro. É necessário ter uma ideia da ordem de grandeza da flutuação estatística típica (µ/x). O aparelho de medição deve ter uma resolução muito baixa de forma a garantir que a variação não é resolúvel (EM A µ). Por exemplo, uma folha de papel A4 sofre alterações do seu comprimento com a temperatura, humidade relativa, etc.. No entanto, para condições perto da pressão e temperatura normais (PTN) as alterações são inferiores a 1 mm, logo não resolúveis. Se há a hipótese da variação da medição ser resolúvel então não é possível ter um nível de confiança e o resultado deve ser descartado. Os casos apresentados nesta secção (9.4.1) assumem que a medição tem variação não resolúvel. 9.4.1.1 Propagação a partir de apenas uma variável Neste caso deve-se dizer que a propagação correcta é a propagação não estatística a partir desta variável (apesar das equações serem exactamente as mesmas para os dois tipos de propagação). O nível de confiança do resultado final será de 100% de que o valor real da grandeza está dentro do intervalo [x EM A, x + EM A]. 9.4.1.2 Propagação conjunta com outras variáveis Suponhamos que se pretende medir uma massa volúmica ⇢ indirectamente a partir de duas variáveis: a massa m e o volume V : ⇢= m V Fizeram-se 100 medições do volume e apenas uma da massa. Os resultados finais das medições directas são os seguintes: m = (6 ± 1) g V = (3.359 ± 0.004) cm3 55 9.4. QUE TIPO DE PROPAGAÇÃO UTILIZAR? CAPÍTULO 9. PROCESSAMENTO DOS DADOS O erro experimental da massa é o erro máximo do aparelho e o erro experimental do volume é o erro padrão (o erro máximo do aparelho era 0.001 cm3 ). Temos então um dilema: o majorante do erro da massa sugere que utilizemos a propagação não estatística mas o erro padrão do volume sugere uma propagação estatística. A propagação de erros deve fazer-se para valores experimentais com o mesmo grau de confiança. Caso contrário, não sabemos o grau de confiança a atribuir ao resultado final. Não podemos diminuir o grau de confiança do intervalo da massa mas podemos aumentar o grau de confiança do intervalo do volume. Logo, por exclusão devemos optar pela propagação não estatística. Para garantir que o grau de confiança do intervalo do volume é de 100% temos que utilizar não ±1 mas ±3 erros padrão: o intervalo de confiança do volume passa de V = (3.359 ± 0.004) cm3 para V = (3.359 ± 0.012) cm3 (como vimos na subsecção 5.6.1, num intervalo de confiança de ±1 erro padrão o nível de confiança é apenas de 68%. Ao aumentarmos o intervalo para ±3 erros padrão, o nível de confiança aumenta para mais que 99%) Aplicando a equação 9.8, o erro experimental será dado por: ✓ ◆ ✓ ◆ V 6g 1 3 ⇥ 0.004 m ⇢=⇢ + = + = 0.3 g cm 3 m V 3.359 3.359 cm3 6 Logo o resultado experimental é: ⇢ = (1.8 ± 0.3) g cm 3 A desvantagem de termos sido forçados a optar pela propagação não estatística é que sabemos com um grau de confiança de 100% que o valor real está entre 1.5 g cm 3 e 2.1 g cm 3 mas o intervalo é enorme. A maior fonte de incerteza reside na medição da massa. O erro relativo da massa (17%) é muito maior que o erro relativo do volume (0.1%) e por isso tem maior impacto na estimativa do erro da massa volúmica (o erro relativo do resultado é de 17%). 9.4.2 Duas ou mais medições 9.4.2.1 Propagação a partir de apenas uma variável Tal como em 9.4.1.1, as equações são exactamente as mesmas para os dois tipos de propagação mas a interpretação do resultado final pode ser diferente conforme o tipo adoptado: . Se o erro experimental da variável inicial for um erro padrão (µ EM A), a propagação correcta é a propagação estatística. É possível quantificar o nível de confiança do resultado experimental (e.g. 68% de que o valor real estar dentro do intervalo [x µ, x + µ]) . Se o erro experimental da variável inicial for um erro máximo do aparelho (µ < EM A), a propagação correcta é a propagação não estatística. É também possível quantificar o nível de confiança do resultado experimental: se assumirmos que o aparelho está bem calibrado, o nível de confiança será de 100% de que o valor real estar dentro do intervalo [x EM A, x + EM A]. 9.4.2.2 Propagação conjunta com outras variáveis Variação resolúvel Suponhamos que modificamos a experiência feita em 9.4.1.2. Melhoramos a resolução da balança e fazemos a medição da massa 100 vezes. Os resultados finais das medições directas passam a ser os seguintes: m = (5.818 ± 0.002) g V = (3.359 ± 0.004) cm3 O erro experimental da massa é o erro padrão (o erro máximo do aparelho era 0.001 g) e o erro experimental do volume é o erro padrão (o erro máximo do aparelho era 0.001 cm3 ). Neste caso como temos informação estatística e os erros experimentais são erros padrão, devemos optar pela propagação estatística do erro. Aplicando a equação 9.19, o erro experimental será dado por: s✓ s✓ ◆2 ✓ ◆2 ◆2 ✓ ◆2 m V 5.818 g 0.002 0.004 ⇢=⇢ + = + = 0.001 g cm 3 m V 5.818 3.359 3.359 cm3 56 CAPÍTULO 9. PROCESSAMENTO DOS DADOS 9.5. ALGARISMOS SIGNIFICATIVOS Logo o resultado experimental é: 3 ⇢ = (1.732 ± 0.001) g cm O erro relativo do volume (0.1%) é uma ordem de grandeza maior que o erro relativo da massa (0.03%) e por isso teve maior impacto na estimativa do erro da massa volúmica (o erro relativo do resultado foi de 0.1%). Podemos então afirmar que existe uma probabilidade de: . 68% do valor real da massa volúmica estar dentro do intervalo [1.731, 1.733] g cm 3 . . 95% do valor real da massa volúmica estar dentro do intervalo [1.730, 1.734] g cm 3 . . maior que 99% do valor real da massa volúmica estar dentro do intervalo [1.729, 1.735] g cm 3 . Variação não resolúvel Retomemos o exemplo da experiência anterior. Suponhamos que repetimos as medições de massa e volume várias vezes e o valor experimental é sempre o mesmo (variação não resolúvel - ver a subsecção 6.3.2). Como é que isso pode acontecer? Neste caso basta que a resolução dos aparelhos diminua uma ordem de grandeza. Os resultados finais das medições directas são os seguintes: m = (5.82 ± 0.01) g V = (3.36 ± 0.01) cm3 Ambos os erros experimentais (da massa e do volume) são erros máximos do aparelho. Neste caso não temos informação estatística mas a repetição sugere que os erros padrão, apesar de desconhecidos são menores que os erros máximos do aparelho. Devemos por isso optar pela propagação não estatística do erro. Aplicando a equação 9.8, o erro experimental será dado por: ✓ ◆ ✓ ◆ m V 5.82 g 0.01 0.01 ⇢=⇢ + = + = 0.01 g cm 3 m V 3.36 cm3 5.82 3.36 Logo o resultado experimental é: ⇢ = (1.73 ± 0.01) g cm 3 O erro relativo do volume (0.3%) é da mesma ordem de grandeza do erro relativo da massa (0.2%). O erro relativo da massa volúmica é então de 0.6% (não dá 0.5% por causa dos arredondamentos dos erros relativos do volume e da massa). O grau de confiança de que o resultado real está entre 1.72 g cm 3 e 1.74 g cm 3 é de 100%. Variação não resolúvel com variação resolúvel Imaginemos que no exemplo da subsecção 9.4.1.2 a medição da massa foi feita 100 vezes e o resultado foi sempre o mesmo: m = (6 ± 1) g A variação da massa não é resolúvel mas a variação do volume é resolúvel. Neste caso devemos fazer exactamente o mesmo tratamento que foi feito na subsecção 9.4.1.2. O intervalo de confiança do volume deve ser aumentado para ±3 erros padrão de forma aos graus de confiança para ambas as variáveis ficarem equiparados. A propagação deve ser não estatística e o resultado apresenta um majorante do erro. 9.5 Algarismos significativos Quando realizamos uma medição obtemos um resultado numérico. Consideram-se algarismos significativos todos aqueles que são retirados directamente do aparelho de medida excepto aqueles: . que não têm significado físico . cuja única função é indicar qual é a ordem de grandeza do número . que variam continuamente durante a medição 57 Bibliografia [1] Preston, D. W. & Dietz, E. R. The art of experimental physics (John Wiley & Sons, 1991). [2] Almeida, G. d. Sistema Internacional de Unidades (SI), grandezas e unidades físicas (Plátano editora, S. A., 2002), 3 edn. [3] (2010). URL http://www.bipm.org/en/si/. [4] Box, G. E. P., Hunter, J. S. & Hunter, W. G. Statistics for Experimenters: Design, Innovation, and Discovery (Wiley-Interscience, 2005), 2 edn. [5] Taylor, J. R. An Introduction to Error Analysis: The Study of Uncertainties in Physical Measurements (University Science Books, 1996), 2 edn. [6] Fraden, J. Handbook of modern sensors: physics, designs, and applications (Springer-Verlag New York, Inc., 2004), 3 edn. [7] Press, W. H., Teukolsky, S. A., Vetterling, W. T. & Flannery, B. P. Numerical Recipes in C++: the art of scientific computing (Cambridge University Press, 2007), 3 edn. [8] Preston, D. W. Experiments in Physics: A Laboratory Manual for Scientists and Engineers (John Wiley & Sons, 1985). [9] Bevington, P. & Robinson, D. K. Data Reduction and Error Analysis for The Physical Sciences (McGraw-Hill Higher Education, 2002), 3 edn. [10] Squires, G. L. Practical Physics (Cambridge University Press, 2001), 4 edn. 101
Baixar