!!"#"!$%
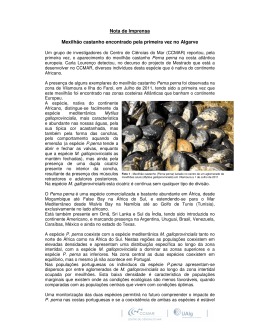
Diagrama do Corpo Livre - Força Muscular
!"#$%&'#()*+*,'-#%./0+)*1+*2#(3+%4$#%.*5*6789:;*
Diagrama de corpo livre (Exemplo)
!"#$%&'()*+$,-&'".)*-/'*0'"$0'*
:<=7(>+3?"(=8:@8*
A?#%+')*
A?".%B#.-#)*
!%.$+%.*
A?".%B#(".1#.-#)*
!.$D+?"./(E3F(*
AC3+"(*
Exemplos de Forças no CH - DCL
&'()*+'%*,-%,./012,34)-%
&,--,%0'.5'%6%7789%
&,--,%5:%6%;<=89%
>.,3'%?)%@'.3,%?%6%;<;A(%
BCDBEDF%GH%&F&HIJF%
K59<%!;7L%
GO,9.,(,%?)%0'.5'%2OR.)%K()(S.'%O*@).O'.L%
M*N2O-)%?)%1%)%2%
!<!
$<!
P<!
5:%
5).*,%
0'Q,%
!%
!!"#"!$%
GO,9.,(,%?)%0'.5'%2OR.)%K5).*,L%
!%GBD%K5).*,L%
\!%0''.?)*,?,-%X')2Y']%B&]%+'.*'W)2'%
GO,9.,(,%?)%B'.5'%DOR.)%KGBDL%
T)-'%5).*,%6%3%%
U'.3,-%?)%.),3V'%*'%+'.*'W)2'%K!%)%4L%
U'.3,-%?)%.),3V'%*'%X')2Y'%K5%)%6L%
Z%)%[%)OQ'-%Y'.OW'*+,2%)%R)./0,2%
\!%-15'*?'%B6A!;I%)%^6P=I%
Limitações da Dinâmica Inversa:!
T,--'-%5"%M*N2O-)%GO*_(O0,%`*R).-,%
Aplicar as reações do segmento
terminal à proximidade distal do
próximo segmento da cadeia
cinématica (continuar análise para
próxima extremidade e.g. perna
ou antebraço)
Dinâmica Inversa
(importante ferramenta/técnica p/ entender o movimento):!
B'(SO*,3V'%?,-%()?O34)-%0O*)(N/0,-%)%0O*:/0,-]%
)a1,34)-%,*+.'5'(:+.O0,-]%,52O0,*?'%,-%2)O-%?,%b-O0,]%
)-5)0O,2()*+)%,-%)a1,34)-%?)%I)c+'*%)%H12).d%%
•! suposições nem sempre válidas:!
G*7+LD($*H-#$+."JK*KU'.3,%6%(,--,%!%,0)2).,3V'%%
2O*),.L%
•! estimativa do centro de rotação pode gerar erro (Holden & Stanhope, 1998)!
!
!
F = ma
•! pode existir atrito na articulação (e.g. artrite)!
•! distribuição de massa no segmento não uniforme, e não concentrada em 1 ponto!
•! modelos típicos (e.g. Helen Hayes) usam antropometria pesada p/ definir o centro da
articulação do quadril (não pode ser definido diretamente c/ 1 marcador)!
•! o centro de rotação pode mover durante o movimento (e.g. joelho) !
G*6C-+"*H.$IC-."JK*K&'()*+'%?)%@'.3,%6%
('()*+'%?)%O*:.0O,%!%,0)2).,3V'%,*912,.L%
!
!
!
M = I"
•! erro de medida (Holden et al, 1997)!
•! o pior erro de precisão pode ser no co-alinhamento da Plataforma de força e o
sistema de análise de movimento (melhor verificado pela fig."palito" (Baker et al,
1997))!
•! movimento do marcador na pele !
•! erros de interpolação em marcadores ou quadros perdidos!
!
Limitações da Dinâmica Inversa:!
(importante ferramenta/técnica p/ entender o movimento):!
•! parâmetros do segmento corpo (antropometria) aproximados e generalizados!
•! diferenças entre as pessoas (acima/abaixo do peso médio), crianças, pacientes c/
diferentes proporções!
•! notar que isto afeta principamente a fase de balanço - na fase de apoio a FRS e
acelerações são mais precisas!
•! consideração especial p/ amputados - valores apropriados dos componentes da prótese
•! propagação de erro (os erros de cálculo na articulação distal afeta aqueles mais
proximais)!
Modelos (anatômico, segmental (CR), DCL)
Dinâmica inversa
•! dividir o corpo em cadeias cinematicas
•! dividir as cadeias em segmentos
•! assumir que cada segmento é um corpo rígido
•! assumir que cada articulação é rotacional s/ atrito
•! começar c/ o segmento terminal da cadeia
cinemática
•! a FRS deve ser conhecida no segmento
terminal ou (=0 extremidade livre)
•! se as forças externas são desconhecidas,
devem ser medidas, senão não tem como
analisar
•! pode somente determinar o efeito combinado!
•! co-contração dos músculos antagonistas vai se cancelar - condições importantes de
espasticidade (PC e AVE) !
•! s/ diferenciação entre os diferentes músculos (e.g. pode determinar o momento flexor,
mas não a atividade relativa em cada músculo flexor - para isso precisa EMG)!
$%
!!"#"!$%
Dinâmica inversa
Dinâmica inversa
Equações indeterminadas (+ variáveis - equações)
•! 2D = 3 equações de movimento
•! existem + que 3 Fs desconhecidas
•! portanto eq. movimento não podem ser resolvidas
•! solução é simplificar o número de incógnitas p/ 3
•! estes são os chamados Força combinada (Fx, Fy) e momento combinado (Mz)
Fazer o DCL do segmento terminal.
Regras:
•! adicionar todas as forças que diretamente influenciam o corpo livre
•! onde o corpo livre tem contato c/ o ambiente ou outro corpo, adicionar F e M desconhecidos
•! simplificar F desconhecidas sempre que possível (F c/ direção conhecida, F pode ser suposta
= 0, superfície s/ atrito)
adicionar todas as Fmusc
em seus ptos de aplic.
desenhar o DCL
considerar somente 1 Fmusc.
deslocar a Fmusc. p/ centro da artic.
adicionar Fcont.ossos e
ligam. e momento na
articulação
adicionar o vetor peso no CG
adicionar a FRS no CP
adicionar a Fbalanço (-F*)
Dinâmica inversa
Equações de movimento p/ o pé (2º Lei de Newton):
Facopladas = momento de força
mostrar todos os vetores posição
(rankle, rground)
substituir as Fmusc. c/
equivalentes Fartic. e Momentos
substituir momento de força livre
adicionar todas as Fs e Ms p/
obter Fs e Ms combinados
mostrar todas as F novamente
mostrar DCL completo
Análise Estática
Aplicar a 3º Lei de Newton p/ a perna
Análise Estática
Equações de movimento p/ o perna
(2º e 3º Leis de Newton):
Equações de movimento p/ a coxa
(2º e 3º Leis de Newton):
desenhar o DCL p/ a perna
"F = 0
"M = 0
"F = 0
"M = 0
P%
!!"#"!$%
Análise Dinâmica
"F = ma
!
"Fx= max
"Fy= may
!
Força muscular resultante no CM do braço (durante saque vôlei)
Torque muscular desenvolvido pela lombar e Mquadril
durante levantamento de peso
a = !ax2 + ay2
"M0= I0! + mad
"Fn = mr"2
"Ft = mr!
"Mg= Ig!
Diagrama de Corpo Livre # Diagrama cinético
Resolver*
Torque muscular desenvolvido pela lombar e Mquadril
durante levantamento de peso
Dinâmica intersegmental
Chute da bola coordenação de
movimento dos segmentos da
coxa, perna e pé
Sistema de 2-segmentos (coxa-perna)
Cinemática da perna
durante o chute
(a) geometria da perna
(b) movimentos do pé, perna e coxa
(c) fatores cinemáticos!veloc.linear
(d) variáveis cinemáticas!aceleração linear
Equações do sistema de 2-segmentos (coxa-perna)
Efeitos dependentes do mvto durante o chute
Torque muscular resultante no joelho
Torque exercido pelo mvto coxa na perna
Torque combinado na perna
Análise segmental de forças e torques nas articulações
Torque muscular resultante no quadril
Torque exercido pelo mvto perna na coxa
Torque combinado na coxa
A%
Baixar