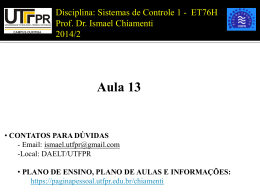
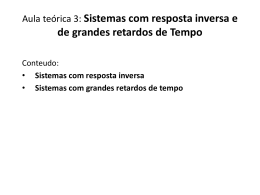
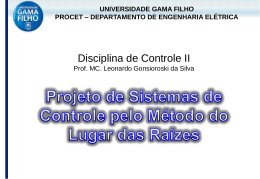
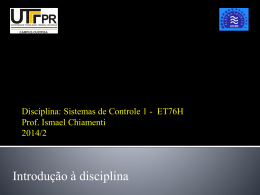
Projeto de Compensadores/Controladores pelo Diagrama de Lugar das Raízes Carlos Eduardo de Brito Novaes [email protected] http://professorcarlosnovaes.wordpress.com 12 de novembro de 2012 1 Introdução O diagrama do lugar das raízes é uma ferramenta muito útil para visualizar as possibilidades de alocação de polos em um sistema de controle. Através dele, pode-se verificar qual a ação a ser tomada para que o sistema em malha fechada se comporte segundo as características desejadas. Serão apresentadas alguns procedimentos para o projeto de compensadores utilizando o diagrama de lugar das raízes. As técnicas descritas estão detalhadas no livro texto [1], e em diversas outras referências recomendadas, como [2, 3], por exemplo. Serão discutidos os compensadores do tipo: 1. “Lead” ou “Avanço de fase” 2. “Lag” ou “Atraso de fase” 3. PID O material ora apresentado se presta apenas como uma breve introdução, sendo também recomendada a leitura da apostila do curso e, para um maior domínio, a consulta ao livro texto. Em especial, o método de projeto apresentado para compensadores PID é apenas ilustrativo para o uso do diagrama de lugar das raízes e, embora funcional, é bastante dependente de um software para traçar o lugar das raízes e assim, acelerar o processo de melhoria da sintonia. 2 Compensador do tipo “Lead” ou “Avanço de Fase” O compensador do tipo “Lead” ou “Avanço de Fase” é utilizado para modificar o diagrama de lugar das raízes, permitindo a alocação dos polos de malha fechada em posições que antes não seriam possíveis. Possui uma função de transferência dada por GC (s) = s+a s+b (2.1) com um polo em s = −b e um zero em s = −a e com a particularidade de que o seu polo é “mais rápido” que o zero, ou seja, o polo esta localizado no eixo real em um valor mais negativo que o zero. Sendo assim, para ser um compensador do tipo lead, então a função de transferência da equação 2.1 apresenta b > a. Por exemplo: GC (s) = s+8 s + 10 (2.2) que possui um polo em s = −10 e um zero em s = −8. No plano complexo, o polo do compensador esta localizado à esquerda do seu zero, apresentando portanto um transitório mais “rápido”. Aplicando um degrau unitário a um compensador lead e utilizando-se o teorema do valor final, podemos verificar que a longo prazo, o compensador apresenta um ganho dado por: 1 2 ( lim s s→0 COMPENSADOR DO TIPO “LEAD” OU “AVANÇO DE FASE” 1 GC (s) s ) = s+a s→0 s + b = a b lim (2.3) a Como foi visto, o compensador “lead” apresenta b > a e portanto a razão é menor que a unidade. Isto significa b que ao introduzir um compensador “lead” na malha direta de um sistema de controle, estamos reduzindo o ganho desta e portanto, reduzindo o valor das constantes de erro estacionário. O efeito final é que a introdução de um compensador do tipo “lead” aumenta o erro estacionário do sistema em malha fechada. Um bom projeto visa escolher a e b de modo que os polos de malha fechada sejam alocados nos pontos de interesse, a mas buscando também o maior valor para a relação , de modo que o erro estacionário em malha fechada não seja b muito prejudicado. Suponha por exemplo que um sistema a ser controlado possui função de transferência G (s) = 1 (s + 1) (s + 2) (2.4) e, por questões de desempenho deseja-se alocar os polos de malha fechada em s = −2 ± 2j, garantindo que a saída em malha fechada estabilize em 5% do valor final em aproximadamente 1 segundo, com fator de amortecimento ζ = 0, 7 e portanto, um sobressinal também inferior a 5%. O primeiro passo é determinar o lugar das raízes do sistema sem compensador, e então verificar se é possível alocar os polos nesta posição apenas pelo ajuste do ganho de realimentação. A figura 2.1 ilustra o diagrama de lugar das raízes. Figura 2.1: Lugar das Raízes da planta sem compensador. como se pode verificar, não os pontos s = −2 ± 2j não são parte do lugar as raízes e portanto, será necessário projetar um compensador para alterar o lugar das raízes de modo que este passe por s = −2 ± 2j. A seguir vamos descrever dois métodos de projeto. Muitas vezes, utiliza-se a representação 2 2.1 Projeto por cancelamento de polo 2 COMPENSADOR DO TIPO “LEAD” OU “AVANÇO DE FASE” GC (s) = KC α Ts + 1 αT s + 1 (2.5) onde KC α representa o ganho que o compensador aplica quando em regime, T esta relacionado à constante de tempo do zero e αT corresponde à constante de tempo do polo (Com α estabelecendo a relação entre as duas). Nesta representação, KC é o ganho calculado a partir da condição de módulo para alocar os polos de malha fechada. 2.1 Projeto por cancelamento de polo Uma técnica para o projeto de um compensador do tipo “lead” é o que se chama de cancelamento de polo ou zero. A ideia fundamental é verificar se é possível obter um diagrama de lugar das raízes satisfatório ao se cancelar um polo da planta e coloca-lo em outra posição. Para o exemplo anterior, bastaria cancelar o polo da planta em s = −2, colocando ai o zero do compensador e, posicionar o polo do compensador em s = −3. Neste caso, a função de transferência do compensador será GC (s) = s+2 s+3 então, a função de transferência do ramo direto é Gc (s) × G (s) = = s+2 1 × s + 3 (s + 1) (s + 2) s+2 3 s + 6s2 + 11s + 6 (2.6) e traçando o novo lugar das raízes, obtém-se Figura 2.2: Lugar das Raízes da planta com compensador lead projetado por cancelamento. claramente, é possível agora posicionar os polos de malha fechada em s = −2 ± 2j. O ganho de realimentação necessário pode ser encontrado pela condição do módulo, ou seja 3 2.1 Projeto por cancelamento de polo 2 COMPENSADOR DO TIPO “LEAD” OU “AVANÇO DE FASE” 1 = K× |Gc (s) × G (s)|s=−2+2j (2.7) e que ao ser resolvida resulta em K = = 1 |Gc (s) × G (s)|s=−2+2j 1 s+2 3 s + 6s2 + 11s + 6 s=−2+2j = = = = = = = 1 − 2 + 2j + 2 (−2 + 2j)3 + 6 (−2 + 2j)2 + 11 (−2 + 2j) + 6 1 − 2 + 2j + 2 (16 + 16j) + 6 (−8j) + 11 (−2 + 2j) + 6 1 2j 16 + 16j − 48j − 22 + 22j + 6 1 2j −10j 1 |−0, 2| 1 0, 2 5 (2.8) O resultado anterior representa o ganho que deve ser aplicado ao ramo direto. Podemos calcular então as constantes de erro estático para este ajuste de K Kp lim (K × GC (s) × G (s)) ( ) 5 (s + 2) = lim s→0 s3 + 6s2 + 11s + 6 = = = s→0 10 6 1, 667 (2.9) e portanto, o erro estático de posição será, em termos percentuais: Erro% = 1 1 + Kp 1 2, 6667 = 0, 375 = 37, 5% = O diagrama em blocos do sistema de controle é ilustrado na figura 2.3 e a resposta é apresentada na figura 2.4. 4 2.2 Projeto pelo método gráfico 2 COMPENSADOR DO TIPO “LEAD” OU “AVANÇO DE FASE” Figura 2.3: Diagrama em blocos do sistema de controle. Figura 2.4: Resposta do sistema de controle. 2.2 Projeto pelo método gráfico Uma técnica mais elaborada para o projeto de compensadores do tipo “lead” é o procedimento gráfico. Utilizando esta técnica garante-se o maior ganho possível no ramo direto e consequentemente, o menor erro estacionário. Esta técnica consiste em 1. Localizar no gráfico a posição dos polos e zeros da planta e também a posição dos polos desejados em malha fechada, a figura 2.5 ilustra esta situação para a planta em questão, com polos em s = −1 e s = −2 e o polo desejado de malha fechada em s = −2 + 2j. 5 2.2 Projeto pelo método gráfico 2 COMPENSADOR DO TIPO “LEAD” OU “AVANÇO DE FASE” Figura 2.5: Projeto gráfico de compensador “Lead” - Passo 1. 2. A partir do polo desejado de malha fechada, trace uma reta horizontal e outra ligando à origem, a figura 2.6 ilustra este procedimento. Figura 2.6: Projeto gráfico de compensador “Lead” - Passo 2. 3. Trace a bissetriz do ângulo formado entre as retas traçadas anteriormente, procedimento ilustrado na figura 2.7. 6 2.2 Projeto pelo método gráfico 2 COMPENSADOR DO TIPO “LEAD” OU “AVANÇO DE FASE” Figura 2.7: Projeto gráfico de compensador “Lead” - Passo 3. 4. Determine qual deve ser a contribuição angular do compensador, φ. Para realizar este cálculo, basta determinar qual a contribuição angular da função de transferência no ponto desejado e verificar quanto falta (ou quanto excede) 180 graus. No nosso exemplo temos 1 G (s)|s=−2+2j = (s + 1) (s + 2) s=−2+2j = −0, 2 + 0, 1j = 0, 2236∠153, 4◦ e portanto, constatamos que a contribuição angular da planta no ponto s = −2 + 2j é de aproximadamente 153, 4◦ . Para completar 180◦ , faltam aproximadamente 26, 6◦ . Dizemos que a planta apresenta uma deficiência angular de 26, 6◦ em s = −2 + 2j e que esta deficiência deve então ser suprida pelo compensador. Conclui-se que o compensador deve contribuir com um ângulo φ = 26, 6◦ . 5. Partindo do ponto onde se deseja alocar o polo de malha fechada, traçamos duas, formando com a bissetriz um φ ângulo de ± o que é equivalente a dizer que o ângulo entre estas duas retas é φ. Veja a figura 2.8. 2 7 2.2 Projeto pelo método gráfico 2 COMPENSADOR DO TIPO “LEAD” OU “AVANÇO DE FASE” Figura 2.8: Projeto gráfico de compensador “Lead” - Passo 5. 6. Por fim, o ponto onde as retas interceptam o eixo real determina a posição do polo e do zero do compensador. Veja a figura 2.9. Figura 2.9: Projeto gráfico de compensador “Lead” - Passo 6. Este procedimento permite a determinação do melhor compensador “lead” possível para a planta em questão. Pelos valores obtidos para este exemplo, o compensador deve ter um polo em s = −3, 4 e um zero em s = −2, 3. A função de transferência do ramo direto será Gc (s) × G (s) = = 1 s + 2.3 × s + 3.4 (s + 1) (s + 2) s + 2.3 3 s + 6.4s2 + 12.2s + 6.8 O diagrama do lugar das raízes com o compensador é ilustrado na figura 2.10 8 (2.10) 2.2 Projeto pelo método gráfico 2 COMPENSADOR DO TIPO “LEAD” OU “AVANÇO DE FASE” Figura 2.10: Lugar das Raízes da planta com compensador lead projetado graficamente. Pela condição do módulo, determinamos o ganho K que deve ser imposto para posicionar os polos de malha fechada em s = −2 ± 2j. Determinando o ganho adequado: K = = 1 |Gc (s) × G (s)|s=−2+2j 1 s + 2.3 3 s + 6.4s2 + 12.2s + 6.8 s=−2+2j 1 = |−0, 1852| 1 = 0, 1852 = 5.4 (2.11) resultado que é confirmado pela figura 2.10. O resultado anterior representa o ganho que deve ser aplicado ao ramo direto. Podemos calcular então as constantes de erro estático para este ajuste de K Kp lim (K × GC (s) × G (s)) ( ) 5.4 (s + 2.3) = lim s→0 s3 + 6.4s2 + 12.2s + 6.8 = s→0 12.42 6.8 = 1, 83 = (2.12) 9 3 COMPENSADOR DO TIPO “LAG” OU “ATRASO DE FASE” e portanto, o erro estático de posição será, em termos percentuais: Erro% = 1 1 + Kp 1 2.83 = 0, 375 = 35, 3% = (2.13) O erro obtido pelo projeto gráfico foi apenas um pouco inferior ao obtido por cancelamento de polos. Esta situação não é a regra geral, muitas vezes o erro estacionário é muito menor, e portanto, o projeto pelo método gráfico é sempre preferível em relação ao simples cancelamento de polo. O diagrama em blocos do sistema de controle é ilustrado na figura 2.11 e a resposta é apresentada na figura 2.12. Figura 2.11: Diagrama em blocos do sistema de controle. Figura 2.12: Resposta do sistema de controle. 3 Compensador do tipo “Lag” ou “Atraso de Fase” Utiliza-se o compensador do tipo “lag” quando o sistema em malha fechada não satisfaz os requisitos de erro estacionário, mas a resposta transitória é suficientemente rápida. Neste caso, a função de transferência do compensador 10 3.1 Projeto de um compensador “lag” 3 COMPENSADOR DO TIPO “LAG” OU “ATRASO DE FASE” é GC (s) = s+a s+b (3.1) com um zero em s = −a e um polo em s = −b e com duas particularidades: 1. O seu zero é “mais rápido” que o polo, ou seja, o zero esta localizado no eixo real em um valor mais negativo que o zero. Sendo assim, para ser um compensador do tipo lead, então a função de transferência da equação 2.1 apresenta a > b. 2. O polo e o zero estão localizados no eixo real, próximos à origem. Desta maneira, garante-se que a interferência no ponto de localização dos polos em malha fechada é mínima. Por exemplo: GC (s) = s + 0.1 s + 0.01 (3.2) que possui um polo em s = −0.01 e um zero em s = −0.1. No plano complexo, o polo do compensador esta localizado à direita do seu zero, apresentando portanto um transitório mais “lento”. Ao se aplicar o teorema do valor final na função de transferência do compensador “lag”, verifica-se que a longo a prazo é como se fosse incluído um ganho com valor > 1. A inclusão de um compensador do tipo “lag”, tem então b o efeito de aumentar o ganho na malha direta, reduzindo o erro estacionário às custas de uma pequena modificação na posição dos polos de malha fechada que tende a tornar o sistema ligeiramente mais lento. 3.1 Projeto de um compensador “lag” O projeto de um compensador do tipo “lag” se resume a: 1. Determinar o fator pelo qual a constante de erro estático do sistema deve ser aumentada. 2. Escolher os valores a e b da função de transferência do compensador próximos da origem e, de modo que a a relação seja igual ao aumento desejado para a constante de erro estático. b 3. Traçar o novo diagrama do lugar das raízes e verificar se existe alteração sensível. Caso a alteração do lugar das raízes seja pequena, determinar o novo ganho K que leva os polos até a posição desejada. Do contrário escolher novos valores de a e b. 4. No caso de um reprojeto de a e b, cabe observar que quanto mais próximos da origem estiverem o polo e o zero do compensador “lag”, menor sera a modificação no CLR, mas por outro lado, mais lenta será a minimização do erro estacionário. Nada impede que se utilize um compensador “lead” para tornar o sistema mais rápido e um compensador “lag” para minimizar o erro estacionário. Este arranjo é conhecido como compensador “lead-lag” e possui uma técnica de projeto específica. Aqui apresenta-se apenas as técnicas isoladas, e por este motivo fizemos primeiro o projeto do compensador “lead” e agora faremos o projeto do compensador “lag” de modo independente. Vamos projetar um compensador do tipo “lag” para o sistema anterior, da figura 2.11, de modo a obter um erro estacionário ao degrau de 2%. Neste caso, a constante de erro do sistema era Kp = 1, 83 (nossa planta agora é a planta original em série com o compensador lead projetado graficamente). Para obter um erro estacionário ao degrau de 2%, a nova constante de erro estacionário ao degrau deve ser tal que 1 . Assim: 0, 02 = Kp,novo + 1 Kp,novo + 1 = Kp,novo Então, o aumento desejado na constante de erro é 11 50 = 49 (3.3) 3.1 Projeto de um compensador “lag” 3 COMPENSADOR DO TIPO “LAG” OU “ATRASO DE FASE” Kp,novo Kp = = 49 1, 83 26, 77 (3.4) Escolhendo-se a posição do zero do compensador “lag” em s = −0, 5, para satisfazer o aumento desejado na constante de erro estático: a = 26, 77 b 0.5 = 26, 77 b 0.5 b = 26, 77 = 0, 0187 (3.5) portanto, o polo deve estar localizado em s = −0, 0187. A próxima etapa é traçar o novo lugar das raízes. A função de transferência da malha direta agora é dada por GC,lag × GC,lead × G = s + 0.5 s + 2.3 1 × × s + 0.0187 s + 3.4 (s + 1) (s + 2) | {z } | {z } | {z } ”lag” ”lead” planta 2 = s + 2.8s + 1.15 4 s + 6, 42s3 + 12, 32s2 + 7s + 0, 13 e o novo diagrama do lugar das raízes é apresentado na figura 3.1 Figura 3.1: Lugar das Raízes da planta (planta+lead) com compensador lag.. Percebe-se que o lugar das raízes foi modificado e não é mais possível alocar o polo de malha fechada exatamente em s = −2 ± 2j. Se esta modificação for aceitável, podemos prosseguir o projeto escolhendo novos polos próximos 12 3.1 Projeto de um compensador “lag” 3 COMPENSADOR DO TIPO “LAG” OU “ATRASO DE FASE” aos desejados, por exemplo em s = −1.8 ± 2j. Observe que se a modificação do CLR devida à inclusão do “lag” não for muito significativa, o ganho K da realimentação também permanece praticamente o mesmo. Determina-se o novo ganho K que leva os polos até esta posição em malha fechada pela condição de módulo K = = 1 |Gc (s) × G (s)|s=−2+2j 1 2 s + 2.8s + 1.15 4 s + 6, 42s3 + 12, 32s2 + 7s + 0, 13 s=−2+2j 1 = |−0, 1656| 1 = 0, 1656 = 6, 04 (3.6) informação que é confirmada pelo MATLAB na figura 3.1. O diagrama em blocos do sistema de controle é ilustrado na figura 3.2 e a resposta é apresentada na figura 3.3. Figura 3.2: Diagrama em blocos do sistema de controle. 13 4 O COMPENSADOR PID Figura 3.3: Resposta do sistema de controle. Muitas vezes, utiliza-se a representação GC (s) = Ts + 1 KˆC β βT s + 1 (3.7) onde KˆC β representa o ganho que o compensador aplica quando em regime, T esta relacionado à constante de tempo do zero e αT corresponde à constante de tempo do polo (Com β estabelecendo a relação entre as duas). Nesta representação, KˆC é o ganho calculado a partir da condição de módulo para alocar os polos de malha fechada. 4 O compensador PID O compensador do tipo PID (Proporcional, Integrativo e Derivativo) é um tipo de compensador amplamente utilizado na industria, podendo ser encontrado em implementação independente ou mesmo como um bloco funcional em CLPs. A sintonia de um PID (ou seja, o ajuste de seus parâmetros) pode ser feita com base no diagrama de lugar das raízes, embora, outros métodos são comumente utilizados, como por exemplo o método de Ziegler-Nichols e até mesmo de forma totalmente empírica (não recomendável, mas pode levar a ótimos resultados dependendo da experiência do profissional que ajusta o PID) Basicamente, um PID possui um diagrama esquemático como o da figura 4.1 (outras configurações ou algorítimos são possíveis) 14 4 O COMPENSADOR PID Figura 4.1: Esquema interno do PID. Teoricamente, o bloco derivador tem função de transferência do tipo F (s) = s, ou seja, não tem polos e possui um zero na origem. Na prática, para poder ser construído e apresentar alguma robustez a ruídos, utiliza-se um bloco com s função de transferência do tipo F (s) = onde α tem um valor muito grande e em alguns casos pode ser ajustado s+α no CLP ou PID. Ao se simplificar o diagrama de blocos do PID, obtém-se para o algorítimo representado na figura 4.1 P ID (s) = = KI + KDs + KP s KDs2 + KP s + KI s (4.1) observa-se então que o PID apresenta um polo na origem e dois zeros (devidos à equação de segundo grau no numerador). O projeto pelo diagrama de lugar das raízes deve então considerar a inclusão de um polo na origem (algo normalmente desejável pois elimina o erro estacionário ao degrau) e de dois zeros que podem estar localizados em pontos distintos do eixo real ou ser complexos conjugados. Pela avaliação do diagrama de lugar das raízes, é possível verificar qualitativamente as modificações devidas aos zeros e ao polo do PID. Pode-se então, determinar a localização aproximada dos zeros adicionados pelo PID, de modo a levar os polos de malha fechada para a posição de interesse e realizar um ajuste mais preciso utilizado o MATLAB para traçar o CLR exato e verificar o resultado. Para a planta exemplificada, com função de transferência G (s) = 1 (s + 1) (s + 2) (4.2) após algumas experiências (traçando o CLR no MATLAB), verificou-se que adicionar um polo na origem e dois zeros complexos conjugados em s = −2.3 ± 0.8j leva o lugar das raízes a passar próximo do ponto desejado. Então, a função de transferência temporária do PID deve ser da forma P ID (s) = = β (s + 2.3 + 0.8j) (s + 2.3 − 0.8j) s βs2 + 4, 6βs + 5, 93β s fazendo β = 1 e traçando o CLR obtém-se o o diagrama da figura 4.2 15 4 O COMPENSADOR PID Figura 4.2: Lugar das Raízes da planta com compensador PID. onde se observa que para um ganho de aproximadamente K = 3, 74, os polos de malha fechada se localizam em s = −2, 04 ± 2, 04j. Desta maneira, deve-se escolher o valor final de β = 3, 74. O próximo passo é determinar a função de transferência definitiva do PID e os correspondentes parâmetros de sintonia. Assim: P ID (s) = = 3, 74s2 + 4, 6 × 3, 74s + 5, 93 × 3, 74 s 3, 74s2 + 17, 2s + 22, 17 s (4.3) e que, pela equação 4.1 correspondem a KD KP = 3, 74 = 17, 2 KI = 22, 17 O diagrama em blocos do sistema de controle é ilustrado na figura 4.3 e a resposta é apresentada na figura 4.4. 16 REFERÊNCIAS REFERÊNCIAS Figura 4.3: Diagrama em blocos do sistema de controle. Figura 4.4: Resposta do sistema de controle PID. Como era de se esperar, o erro estacionário ao degrau é nulo devido à inclusão de um polo na origem. Referências [1] K. Ogata, Engenharia de controle moderno, 5th ed. Prentice Hall / SP, 2010. 1 [2] R. C. Dorf and R. H. Bishop, SISTEMAS DE CONTROLE MODERNOS, 11th ed. Científicos Editora, 2009. 1 [3] N. S. Nise, ENGENHARIA DE SISTEMAS DE CONTROLE, 5th ed. 17 LTC, 2009. 1 LTC - Livros Técnicos e
Baixar