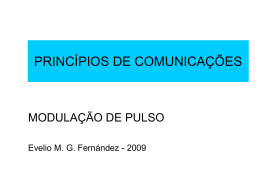
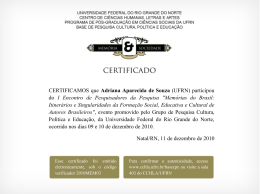
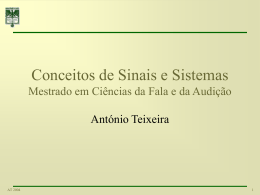
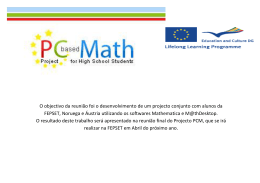
Sumário Sumário.....................................................................................................................1 1. O Modelo da comunicação digital..........................................................................2 1.1 – Introdução às Centrais Telefônicas Digitais......................................................2 1.1.1 – Motivação.............................................................................................3 1.1.2– Transição...............................................................................................4 2. Princípio Básico de Sistemas Amostrados..............................................................6 2.1 Amostragem e modulação..........................................................................6 2.2 Amostragem no tempo...............................................................................8 2.3 Filtragem anti-aliasing..............................................................................11 2.4 TDM – Time Division Multiplex..................................................................14 3. Introdução aos Sistemas PCM – Pulse Code Modulation........................................15 3.1 Quantização...............................................................................................15 3.2 Quantização Linear....................................................................................19 3.3 Quantização Não-linear.............................................................................19 3.4 Compressão................................................................................................20 3.4.1 Leis de compressão.......................................................................20 Lei ........................................................................................21 Lei A...........................................................................................21 4. Sistemas PCM........................................................................................................24 4.1 Codificação................................................................................................24 4.2 Palavra PCM..............................................................................................25 4.3 Característicasdo Multiplex TDM-PCM.....................................................26 4.4 Especificações CCITT para o sistema PCM de 30 + 2 canais.....................28 4.4.1 Canal...........................................................................................28 4.4.2 Intervalo de tempo de canal (ITC)...............................................28 4.4.3 Intervalo de tempo de bit (ITB)...................................................29 4.3.4 Velocidade de transmissão..........................................................29 4.3.5 Quadro.........................................................................................29 4.3.6 Multiquadro.................................................................................30 4.3.7 Sincronismo ou alinhamento do quadro......................................31 4.3.8 Informação de alarme.................................................................33 4.3.9 Perda de sincronismo de multiquadro.........................................34 5. Transmissão..........................................................................................................36 5.1 Introdução................................................................................................36 5.2 Codificação de Linha.................................................................................37 5.3 Transformação do NRZ para AMI, HDB3..................................................37 5.4 Regeneração do sinal................................................................................40 5.5 Circuito de relógio....................................................................................41 5.6 Representação das fases do sistema PCM em níveis homólogos...............42 Bibliografia..............................................................................................................44 UFRN – Sistemas de Telecomunicações I - 1 1. O Modelo da comunicação digital A comunicação digital trata da transmissão de informação através de símbolos. Na transmissão analógica a informação é transmitida por um sinal chamado portadora, fazendo com que esta portadora varie proporcionalmente com o sinal ou a informação que se quer transmitir. Assim, um sistema analógico em que a informação é enviada pela variação proporcional da amplitude da portadora recebe o nome de modulação em amplitude, já a modulação em freqüência é aquela em que a informação está contida na variação da freqüência da portadora, o mesmo acontece com a modulação em fase. Esta modulação analógica é apropriada para a transmissão de informação que já se encontre na forma analógica. No entanto, existem muitas fontes de informação que assumem uma forma digital, isto é, produzem informação em uma forma descontínua e que é melhor descrita por números, daí seu nome digital. Para que a informação digital possa ser enviada através de um sistema de transmissão é necessário que esta informação seja representada por sinais elétricos, por exemplo, o valor lógico “1” representado por um pulso de tensão +V e o valor lógico “0” representado por um pulso de tensão -V. Portanto, a comunicação digital corresponde a transmissão de informação digital através de símbolos. Embora a comunicação digital se refira a transmissão de informação que se encontre na forma digital, não significa que apenas informação gerada nesta forma possa se utilizar de um sistema de transmissão digital. Na realidade existem várias razões para incentivar a transmissão na forma digital de sinais que são originalmente produzidos em forma analógica, como voz, áudio e vídeo. Duas razões se destacam, a primeira sendo a maior imunidade ao ruído que os sistemas digitais apresentam. Na transmissão de qualquer sinal sempre existe a adição de interferência produzidas pelo próprio sistema de transmissão e genericamente designadas como ruído. Portanto, todo o receptor de sinais trabalha na verdade com sinal e ruído adicionados. No caso de um receptor analógico, sinal e ruído são tratados de mesma forma já que ambos têm a mesma natureza, não havendo meios do receptor distinguir um do outro. Já no caso de um receptor digital a situação se altera pois embora sinal e ruído também sejam adicionados a sua natureza é totalmente distinta, sendo o sinal digital e o ruído analógico. Isto permitirá que o receptor digital distiga o sinal de informação mesmo quando seja muito distorcido, além de permitir a repetição regenerativa do sinal por ser previamente conhecido. Um exemplo disso seria a transmissão de pulsos retangulares, onde o receptor sabe de antemão que o sinal recebido deve ser um pulso nível alto ou nível baixo. Em uma recepção analógica isto é praticamente impossível. A segunda razão de incentivo ao emprego da transmissão digital para sinais gerados na forma analógica reside no fato da utilização de técnicas computacionais executadas por microprocessadores para a recepção e tratamento desses sinais. Estas técnicas genericamente denominadas de Processamento Digital de Sinais viabilizam a implementação de filtragens, cancelamento de interferências, cancelamento de ruídos e outros processamentos por software. Tais métodos viabilizam processamentos inimagináveis com técnicas analógicas. UFRN – Sistemas de Telecomunicações I - 2 1.1 – Introdução Digitais às Centrais Telefônicas 1.1.1 - Motivação Existe uma forte tendência à transformação dos sistemas telefônicos em redes inteiramente digitais, tanto na transmissão como na comutação. Essa transformação teve início quando da introdução, em escala comercial, dos sistemas de transmissão PCM (Pulse Code Modulation), abordados posteriormente, muito comuns hoje em dia. A evolução da tecnologia no campo da computação e dos sistemas digitais propiciou a continuidade dessa transformação através da introdução do processamento de dados no controle das centrais telefônicas, criando-se as denominadas centrais CPA ( Controle por Programa Armazenado). Em razão dessa mesma evolução, dispõe-se hoje de técnicas e componentes que viabilizam a implementação de centrais telefônicas inteiramente digitais, incluindo-se as redes de comutação, que anteriormente eram eletromecânicas. Nestas centrais, os sinais de voz, previamente transformados por codificação em PCM, são manipulados como sinais digitais, sem necessidade de retorno à forma analógica, a não ser nos extremos próximos aos assinantes. A introdução de centrais digitais em uma rede telefônica propicia, por sua vez, não só simplificações e reduções de custo dos equipamentos de transmissão e controle, como também justifica o desenvolvimento de componentes digitais específicos para telefonia, reforçando assim os fatores iniciais que justificaram sua introdução. As principais vantagens da introdução de tecnologia digital em centrais telefônicas podem ser assim classificadas: a) Vantagens técnicas: • • • • • • melhor qualidade de transmissão, tanto pelas vantagens já apresentadas de transmissão PCM como pela eliminação de sucessivas conversões A/D (Anógico/Digital) e D/A (Digital/Analógico) nos acessos às centrais analógicas interligadas interligadas por sistemas PCM; maior dificuldade ao interceptar uma conversação e maior facilidade de codificação para ligações sigilosas; maior capacidade de sinalização entre centrais através do aproveitamento adequado dos canais de sinalização dos sistemas PCM (64Kbits/s para PCM de 30 canais); menor tempo para o estabelecimento de chamadas, quer pelo acesso mais rápido aos componentes da matriz de comutação, em razão da compatibilidade entre as tecnologias da matriz e do controle, quer pela maior facilidade de determinação de rotas livres na matriz; maior facilidade de projeto e implementação de matrizes de comutação de grande capacidade e bloqueio pequeno; compatibilidade com os meios de comunicação digital. UFRN – Sistemas de Telecomunicações I - 3 b) Vantagens econômicas • • • • redução de custo dos terminais de acesso à central pela eliminação dos circuitos conversores A/D e unidades de canal, propiciando um aumento da faixa de distâncias econômicas para transmissão digital; redução de peso e espaço ocupado pela matriz de comutação, simplificando a construção civil do prédio que aloja a central; possibilidade de integração de serviços, que permite a transmissão e comutação mais eficiente de dados de qualquer natureza; simplificação da operação e dos procedimentos de pesquisa e correção de falhas. Para completar esse quadro, devem ainda ser considarados vantagens todos os benefícios e as facilidades resultantes da utilização de controle da central por programa armazenado e do processamento digital de sinais. 1.1.2– Transição A penetração de técnicas digitais nas redes analógicas ocorreu de forma muito rápida em razão dos investimentos realizados após as privatizações. Entretanto algumas redes telefônicas permanecerão analógicas ainda por um certo tempo. Nos anos 70 as centrais telefônicas iniciaram uma evolução de uma concepção analógica para digital. Esta transformação iniciada no núcleo das centrais, pela substituição de componentes eletromecânicos por processadores digitais estendeu-se a outras áreas periféricas das centrais, dando origem às centrais digitais CPA (Controle por Programa Armazenado). Em 2002, no Brasil, 98 % das centrais eram digitais. Comentam-se, a seguir, alguns aspectos relativos à digitalização das redes telefônicas. Naturalmente a transformação descrita é apenas um exemplo típico. Para efeito da digitalização, as redes telefônicas podem ser subdivididas em três áreas: a) rede de assinantes; b) rede de troncos locais; c) rede de troncos interurbanos. a) a rede de assinantes, em razão da grande quantidade de equipamentos envolvidos, tede a ser a última etapa da digitalização do sistema como um todo. Várias soluções têm sido propostas e estudadas. Na rede de troncos interurbanos nacionais e internacionais, muito já se tem feito em termos de desenvolvimento de equipamentos para transmissão digital de alta taxa e os primeiros problemas de sincronismo começaram a ser solucionados; a escolha de rotas leva em conta o acúmulo de ruído de quantização causado pelas múltiplas conversões A/D e D/A; b) as velhas centrais analógicas estão sendo substituídas por novas, digitais, ou UFRN – Sistemas de Telecomunicações I - 4 mesmo desmembradas em concentradores remotos de outras centrais. Todas as conexões são inteiramente digitais, de modo que as conversões A/D e D/A são realizadas, num primeiro momento, apenas para prover a transmissão. Os equipamentos analógicos devem permanecer, ainda por algum tempo, de forma competitiva. É nas redes de troncos locais que se dá a parte mais significativa da transição dos sistemas analógicos para os digitais. c) a transformação de uma rede urbana multicanal, em virtude do alto custo dos equipamentos, será mais lenta e gradativa, de forma que o analógico e o digital deverão ainda conviver em harmonia por um longo período. A interface entre ambos será sempre baseada em sistemas de transmissão e modulação PCM, já padronizados. A Figura 1.1 especifica os vários passos da transformação: a) o ponto de partida é uma rede completamente analógica; b) novos troncos instalados deverão ser digitais (PCM). Esse ponto corresponderia às atuais redes telefônicas reais; c) uma nova central instalada deverá ser digital, conectada às analógicas existentes através de sistamas PCM. As conversões A/D e D/A poderão ser feitas junto a quaisquer das centrais, e os assinantes serão ligados à nova central digital através de concentradores (locais ou remotos) e conversão para PCM; d) uma nova central digital é instalada nos mesmos moldes e surgem os primeiros enlaces completamente digitais. e) uma central analógica é substituída por uma digital e interliga-se a outras analógicas por enlaces digitais. O processo continua até a completa digitalização da rede. Figura 1.1: A evolução da rede de comunicação. UFRN – Sistemas de Telecomunicações I - 5 2. Princípio Básico de Sistemas Amostrados 2.1 Amostragem e modulação É extremamente importante para a compreensão dos sistemas de transmissão digitais enteder de que forma um sinal analógico como a voz humana é transformado em um sinal digital e trafega pela rede de telecomunicações. A amostragem constitui uma etapa primordial na geração de sinais PCM, que é a base para entendermos as hierarquias digitais. O que devemos levar em mente de todo o desenvolvimento matemático explicado a seguir é o critério de Nyquist. O resultado clássico da teoria da amostragem foi estabelecido em 1933 por Harry Nyquist, que demonstrou que um sinal analógico pode ser reconstituído desde que tenham sido retiradas amostras em tempos regularmente espaçados. Isso deve-se ao fato de que um sinal analógico incorpora uma grande quantidade de redundância, sendo portanto, desnecessário transmiti-lo continuamente. Nyquist provou que a freqüê ncia mínim a de amostr a g e m (fs) é igual a duas vez es a freqü ência máxim a (W) do sinal a ser trans mitido Neste capítulo estudaremos as características e as propriedades do processo de amostragem. Este processo, descrito na Figura 2.1 consiste em formar, a partir de um sinal contínuo , uma nova função, chamada função amostra. Esta função obtém-se a partir da função inicial um processo de amostragem periódico (de período palavras, a função é obtida pelo produto de amostragem através de segundos). Noutras com a função de , que é uma série periódica de impulsos estreitos (em relação a ). Este processo de multiplicação no domínio do tempo corresponde, como já sabemos a uma convolução no domínio da frequência e que se traduz, na prática, por uma modulação. Dizemos assim que a função modula em amplitude para formar reconstrução do sinal inicial . A operação inversa consiste no processo de a partir das amostras da função amostra . Isto é realizado na Figura 2.1 por um filtro ideal. Figura 2.1: processo de amostragem e de reconstrução. UFRN – Sistemas de Telecomunicações I - 6 Consideremos um sinal espectro , passa-baixo, com uma banda limitada, tendo um que é nulo fora de uma banda (ver Figura 2.2). Para efectuar o nosso processo de modulação consideremos, para ilustrar, um sinal sinusoidal de frequência , de tal modo que o sinal modulado é (2-1.1) Como sabemos que a representação frequencial de dois Diracs colocados a e é constituída por , o produto temporal da (2-1.1) torna-se numa convolução no domínio da frequência e o resultado é que (2-1.2) Figura 2.2: espectro do sinal original. o que se encontra ilustrado na Figura 2.3. Este resultado pode ser generalizado para o caso em que é uma soma de funções periódicas a frequências múltiplas de , isto é, . Neste caso o produto de (2-1.1) dá no domínio da frequência uma repetição do espectro de às frequências harmónicas . Figura 2.3: espectro do sinal amostrado. UFRN – Sistemas de Telecomunicações I - 7 2.2 Amostragem no tempo A forma que deve ter a função periódica , para realizar uma amostragem ideal, é dada por uma série periódica de impulsos de Dirac. Noutras palavras, pode-se definir a função de amostragem ideal por (2-2.1) que evidentemente tem como espectro (2-2.2) onde é a frequência de amostragem. A função amostra formada pelo produto da função inicial é , de espectro limitado, com a função . Pode-se portanto escrever (2-2.3) e o espectro desta função amostra é evidentemente (2-2.4) UFRN – Sistemas de Telecomunicações I - 8 Figura 2.4: processo de amostragem e reconstituição. UFRN – Sistemas de Telecomunicações I - 9 Pode-se ver desta maneira, que o espectro de espectro do sinal inicial, se encontra a partir do , retardando este de , isto é, valores múltiplos da frequência de amostragem. Este processo de amostragem é ilustrado na Figura 2.4. Estes resultados foram obtidos considerando o caso particular em que a frequência de amostragem era suficientemente elevada em relação à frequência máxima do sinal , isto é, . Observando a Figura 2.4 torna-se evidente que, para que não exista sobreposição de dois espectros consecutivos, é necessário e suficiente que a frequência de amostragem seja superior ou igual a , isto é, que (2-2.5) Esta condição é absolutamente necessária para poder reconstituir o sinal partir de a através da filtragem passa-baixo deste último. Neste caso (2-2.6) quando . Este processo de reconstituição está também representado na Figura 2.4. Neste momento podemos estabelecer o teorema fundamental da amostragem ou de Nyquist Como o sinal analógico é contínuo no tempo e em nível, contém uma infinidade de valores. E como o meio de comunicação tem banda limitada, somos obrigados a transmitir apenas um certa quantidade de amostras deste sinal, como enunciado anteriormente no Teorema de Nyquist. É obvio que quando maior a freqüência de amostragem, mais fácil será reproduzir o sinal, mas haverá desperdício de banda ocupada sem nenhuma melhoria na qualidade. O circuito que permite amostrar o sinal é uma simples chave que se fecha por um brevíssimo instante, na cadência da freqüência de amostragem. Por exemplo se a freqüência de amostragem for de 8 kHz, a chave se fecha 8000 vezes por segundo, ou seja, a cada 125 micro segundo. Como a chave se fecha por um tempo extremamente curto, teremos na sua saída um sinal em forma de pulsos estreitos, com amplitude igual ao valor instantâneo do sinal, chamados pulsos PAM (pulsos modulados em amplitude). No exemplo, a freqüência de 8KHz não foi uzada à toa, pois como sabemos, nos sistemas talefônicos transmitimos a voz numa banda limitada de 4 Khz e pelo critério de Nyquist teremos que amostrar esse sinal com uma freqüência duas vezes maior. UFRN – Sistemas de Telecomunicações I - 10 A Figura 2.5 ilustra o principio da amostragem : Figura 2.5: Amostragem e geração dos sinais PAM 2.3 Filtragem anti-aliasing Como dito anteriormente, a quantidade de amostras por unidade de tempo de um sinal, chamada taxa ou freqüência de amostragem, deve ser maior que o dobro da maior freqüência contida no sinal a ser amostrado, para que possa ser reproduzido integralmente sem erro de aliasing. A metade da freqüência de amostragem é chamada freqüência de Nyquist e corresponde ao limite máximo de freqüência do sinal que pode ser reproduzido. Como não é possível garantir que o sinal não contenha sinais acima deste limite ( distorções, interferências, ruídos, etc...), é necessário filtrar o sinal com um filtro passa baixo com freqüência de corte igual (ou menor) a freqüência de Nyquist, ou filtro anti-aliasing para que esse possa ser recuperado. UFRN – Sistemas de Telecomunicações I - 11 O sinal de amostragem (que atua na chave) é constituído de impulsos com a freqüência de amostragem fa, também chamada função amostra. O espectro deste sinal contem raias de mesmo nível e freqüência múltiplas inteiras de fa, ou seja, 0 Hz (componente continua), fa, 2fa, 3fa, 4fa ... (até o infinito se a duração do impulso for nula...). O sinal PAM terá portanto estas mesmas raias, porém com as bandas laterais criadas pela modulação em aplitude, como mostra a Figura 2.6, onde fa é maior que o dobro de fmax para que não haja aliasing: Figura 2.6 Freqüência de amostragem maior que o dobro da frequência do sinal amostrado UFRN – Sistemas de Telecomunicações I - 12 A Figura 2.7 mostra o que acontece quando não há filtro anti-aliasing e o espectro do sinal tem freqüência máxima maior que fn : Figura 2.7 Freqüência de amostragem menor que o dobro da frequência do sinal amostrado Podemos agora observar como ocorre o efeito de aliasing, que nada mais é do que a superposição dos espectros de cada raia PAM, por falta de espaço. Na restituição do sinal pelo filtro passa baixo com freqüência de corte fn, a parte do espectro original acima de fn (no caso a ponta do triângulo) aparece como se tivesse sido dobrada em torno de fn e invertida espectralmente, ou seja, freqüências mais altas passam a ser menores. O sinal indesejável de aliasing que aparece na reprodução é uma réplica do sinal original fo, porém com freqüência errada e igual a fa-fo. Osbserve como a forma de onda do sinal restituído é deformada em relação ao original. UFRN – Sistemas de Telecomunicações I - 13 2.4 TDM – Time Division Multiplex O TDM é uma técnica para transmissão de várias mensagens por um único meio, e consiste na divisão do tempo em canais apropriados. Levando em conta o visto no teorema da amostragem, verifica-se que existem intervalos de tempo entre as amostras PAM em que não há sinal nenhum. Pode-se, pois, usar esses intervalos de tempo para transmissão de outros sinais, conforme se evidencia na Figura 2.7 FPB FPB sincronismo Figura 2.7 – Princípio básico de sistemas TDM O Princípio básico de sistemas TDM é muito simples. As várias entradas xn(t), todas com freqüências limitadas em fn (4KHz), são seqüencialmente amostradas por um comutador sincronizado. O comutador completa um ciclo de revolução no tempo Ta, extraindo amostra de cada entrada. Na saída do comutador, tem-se um sinal PAM(Pulse Amplitude Modulation), que consiste em amostras das mensagens individuais, periodicamente entrelaçadas no tempo, conforme mostra a Figura 2.8. Se há n entradas, o espaçamento de amostra a amostra é Ta/n, enquanto o espaçamento entre amostras provenientes de mesma entrada é, evidentemente, Ta. No lado do receptor, uma chave análoga ao comutador, denominada distribuidor, separa as amostras e s distribui a um banco de filtros passa-baixas que, por sua vez, recupera as mensagens originais. Evidentemente, o comutador e o distribuidor deverão estar sincronizados para tal. Em princípio, o número de canais é ilimitado. Os fatores que limitam esse número são, por exemplo, energia do sinal demodulado e banda passante necessária do meio de transmissão. Sistemas FDM – Frequency Division Multiplex e TDM representam técnicas duais. Nos sistemas TDM, os sinais são operados no tempo e misturados no domínio da freqüência, enquanto, nos sistemas FDM, os sinais são separados no domínio das freqüências e misturados no tempo. Do ponto de vista teórico, um sistema nã pode ser classificado como inferior em relação a outro. Do ponto de vista prático, os sistemas TDM apresentam algumas vantagens: são relativamente mais simples e menos vulneráveis a diafonia do que os sistemas FDM. UFRN – Sistemas de Telecomunicações I - 14 Figura 2.8 – Sinal PAM: amostras das mensagens entrelaçadas no tempo. 3. Introdução aos Sistemas PCM – Pulse Code Modulation 3.1 Quantização Os sinais PAM vistos até agora variam continuamente em função da informação, podendo assumir qualquer valor dentro dos limites desta. Se a amostra for pertubada por ruídos, não há meios de, na recepção, demodular-se o valor exato da transmissão. UFRN – Sistemas de Telecomunicações I - 15 Considere que a amostra PAM não possa variar continuamente, assumindo apenas alguns valores prefixados. Se a separação entre esses valores for grande, em comparação com o ruído, no lado receptor será fácil dicidir que valor buscava-se transmitir. Dessa forma, efeitos de ruídos randômicos podem ser virtualmente eliminados. Além do mais (dependendo da exigência do meio), o sinal pode ser, periodicamente, ao longo do meio de transmissão, recuperado e retransmitido livre de ruídos, ou seja, o ruído não é cumulativo como nos sistemas analógicos usuais. As amostras quantificadas serão codificadas para a transmissão: este é o sistema PCM básico (Figura 3.1). Se houver amostras em número finito (q), cada nível poderá ser representado por um código digital de extensão finita. A função do codificador é gerar um código digital que representa univocamente a amostra quantizada. Seja o número de pulsos em um certo código e o número de valores discretos que cada pulso pode assumir. Existirão combinações diferentes de pulsos com amplitudes possíveis. Na maioria das vezes, =2 ; nesse caso, o número de níveis de quantização é dado por q=2 . Figura 3.1 – Sistema PCM básico. De posse do sinal analógico amostrado, em forma de amostras ou pulsos PAM, ainda analógicos, precisamos quantificar (ou quantizar) esta infinidade de valores possíveis em outros que passam ser representados por uma quantidade finita de bits, para obter um sinal digital. Esta conversão é feita por um circuito chamado conversor analógico-digital A/D ou ADC. Cada amostra ou pulso PAM é transformada em uma quantidade ou palavra predefinida de bits. Por exemplo, com =8 bits é possível representar 256 valores diferentes (0 a 255). Para facilitar a compreensão, vamos supor que os pulsos PAM são limitados entre 0 e 255 Volts. Um pulso qualquer pode ter como valor real 147,39 V (Figura 3.1), mas terá de ser quantizado como tendo 147 V ou 148 V, pois não é possível representar 147,39 com 8 bits. O valor quantizado (para mais ou para menos) depende dos valores dos níveis de decisão no projeto do ADC. Teremos então um erro, no caso de -0,39 V ou +0,61 V respectivamente, chamado erro de quantização . Esta falta ou excesso no valor do sinal provoca o surgimento de um sinal aleatório, chamado ruído de quantização. UFRN – Sistemas de Telecomunicações I - 16 A Figura 3.2 mostra o aspecto do erro ou ruído de quantização para um sinal senoidal: V ΔV 148 147 147,39 Figura 3.1 – Ruído de quantização. Se prova matematicamente que a máxima relação sinal/ruído de quantização possível é da ordem de: S/R max = 6n , onde n é o numero de bits. Por ex. 8 bits : S/R de quantização max = 48 dB 16 bits : S/R de quantização max = 96 dB Esta relação só é atingida para um sinal de valor máximo Vmax. Se o sinal V for menor, por ex. 1/10 do máximo, a relação S/N será 100 vezes pior ou 20 dB menor, e assim por diante. S/R de quantização = 1,76 + 6,02 n - 20 log ( Vmax / V ) Para contornar este novo problema, que faz com que sinais fracos tenham baixa relação S/Rq, usam-se quantizações não lineares, onde os níveis de quantização não são iguais como na Figura acima, mas são muito pequenos para sinais pequenos e maiores para sinais maiores, provocando o efeito de compressão, como será abordado melhor adiante. Outro aspecto importante diz respeito a polaridade do sinal. Existem várias formas de se quantizar valores negativos de tensão. O exemplo seguinte mostra o caso para arquivos digitais de sons no formato *.WAV com 8 bits. Em PCM para telefonia, se usa uma notação com sinal-magnitude com 8 bits. O eixo de tensão não é deslocado como no exemplo a seguir. São quantizados 127 valores positivos e 127 valores negativos, ou magnitude do sinal, com 7 bits. O UFRN – Sistemas de Telecomunicações I - 17 oitavo bit (o mais significativo) indica a polaridade , 1 = positivo e 0 = negativo. O eixo vertical da Figura 3.2 é graduado no valor das amostras quantizadas com 8 bits : 0 a 255. Figura 3.2 – Aspecto de um arquivo de áudio amostrado no formato *.WAV com 8 bits O eixo de tensão, 0 Volts, é deslocado (off-set) para 128. Podemos assim representar valores negativos de -1 até -128 com 127 até 0 respectivamente, sem necessidade de sinal de polaridade (-). A forma de onda quantizada acima, no formato decimal é : 118,135,130,138,151,165,179,179,182,195,179,144,109,78,51,37,39,62,97,123. O que representa os seguintes valores quantizados de tensão (em V), supondo DELTAVmáx =255 : -10,+7,+2,+10,+23,+37,+51,+51,+54,+67,+51,+16,-19,-50,-77,-91,-89,-66,31,-5 . Figura 3.3 – PCM 8 bits em formato *.WAV UFRN – Sistemas de Telecomunicações I - 18 3.2 Quantização Linear O processo de quantização, como já foi esclarecido anteriormente, aproxima os valores das amostras do sinal PAM para níveis predeterminados, quando o número de níveis é o mesmo para sinais de intensidade alta ou baixa. Verificamos que se cada degrau de quantização tiver uma amplitude ΔV, o maior erro que pode surgir será igual a ΔV/2, pois o sinal PAM sempre é comparado com o valor médio de cada segmento (nível de decisão). V ΔV - degrau de quantização níveis de decisão Figura 3.4 – Quantização linear 3.3 Quantização Não-linear Na quantização não linear, o número de níveis de quantização é inversamente proporcional ao nível do sinal aplicado, ou seja, temos um maior número de níveis de quantização para amostras com pequenos valores de amplitude e um menor número de níveis de quantização para amostras com grandes valores de amplitude. No exemplo da Figura 3.5 temos 3 segmentos com 5 níveis em cada segmento. Os níveis dentro de cada segmento têm o mesmo tambanho. Note ainda que o segmento II é o dobro do primeiro e o segmento III é o dobro do segundo. UFRN – Sistemas de Telecomunicações I - 19 V ΔV - degrau de quantização III níveis de decisão II I Figura 3.5 – Quantização não-linear – 3 Segmentos(I,II,III) e 5 degraus por segmento 3.4 Compressão A compressão é a operação que consiste em comprimir as amostras do sinal PAM com o objetivo de melhorar a transmissão. Sabemos que o ruído de quantização independe do nível do sinal, uma vez fixada a máxima excursão dos níveis e o número de níveis de quantização. Neste caso o ruído é constante e a relaçao sinal-ruído dependerá somente do nível do sinal. Mas este sendo variável com o tempo, a relação sinal-ruído será máxima, quando o nível for máximo e mínima quando o nível for mínimo. Para mantermos a relação sinalruído o mais constante possível deve-se diminuir os intervalos entre os níveis de quantização onde estão os baixos valores das amostras e aumentarmos estes intervalos quando a amplitude das amostras forem grandes. 3.4.1 Leis de compressão O grau de não-uniformidade na quantização é conhecido como lei de compressão. Várias curvas de compressão foram estudadas, verificando-se que leis de compressão logarítmica eram mais convenientes. Como os sistemas recebem tanto sinais positivos quanto sinais negativos, as curvas são simétricas e passam pela origem. A parte da curva que se refere a sinais pequenos tem inclinação mais acentuada comparada com a quantização linear. UFRN – Sistemas de Telecomunicações I - 20 a) Lei O grau de compressão pode variar conforme o valor de , que é normalmente 100 ou 225 (T1-D1, primeiros sistemas americanos e japonês) e = 255 (T2-D2 idem), ilustrados na Figura 3.6 Figura 3.6 – Curva de compressão da lei b) Lei A É a lei adotada na Europa, América do Sul (inclusive Brasil), África e em todas as rotas internacionais. A compressão é linear para pequenos sinais e revertida em logarítmica para sinais grandes. O valor de A = 87,6 (correspondente à solução da equação A/(1+lnA) = 16, que é o valor da inclinação dos segmentos próximos à origem) é recomendado, pelo CCIT, para o sistema primário de 30 canais e é usada na forma segmentada, pois isso leva a grandes vantagens na implementação, como se verá adiante. Quando usada na forma segmentada, a curva contínua é dividida em segmentos, conforme o gráfico da Figura 3.7. Observa-se, então, que os sinais de menor amplitude são realçados (inclinação 16 nos segmentos 0 e 1), enquanto os de maior amplitude são comprimidos (inclinação ¼ no segmento 7). Dada a colinearidade dos segmentos 0 e 1, tanto para sinais positivos como negativos, a compressão obtida é, às vezes, denominada de “13 segmentos”. UFRN – Sistemas de Telecomunicações I - 21 128 SEGMENTO VII 113 112 VI 97 96 V 81 80 IV 65 64 III 49 48 II 33 32 I 17 16 1 256 32 64 128 512 1024 2048 4096 Figura 3.7 – Curva de compressão da lei A segmentada – ciclo positivo Características básicas que representam a lei A: 1. Cada segmento tem o mesmo número de níveis de quantização 2. Os intervalos entre níveis dentro de um mesmo segmento devem ser iguais. 3. Os intervalos em todos os segmentos devem ser múltiplos integrais dos intervalos contidos no primeiro segmento, correspondente às menores amplitudes, ou seja, se o primeiro segmento tiver intervalos iguais a 1/n, onde n é o número de níveis de quantização, o segundo segmento deverá ter intervalos iguais a 1/Kn; o terceiro iguais a 1/K'n e assim sucessivamente. UFRN – Sistemas de Telecomunicações I - 22 A Figura 3.8 mostra uma tabela onde estão colocados todos os níveis possíveis, desde 0 até 4096, sendo estes valores unitários normalizados, onde 4096 corresponde a uma amplitude máxima de 3,14dBm. Nota-se nesta tabela que cada segmento e o nível do segmento recebem um certo valor binário, que veremos mais a frente e representará o valor codificado digitalmente do valor da amostra. Valores das amplitudes das amostras Figura 3.8 – Níveis de tensão normalizados e seu respetivo código UFRN – Sistemas de Telecomunicações I - 23 4. Sistemas PCM 4.1 Codificação A codificação é a operação que associa um determinado código a cada valor de pulso PAM após serem quantizados e comprimidos. A necessidade da codificação dos pulsos PAM vem do fato de que caso estes pulsos fossem transmitidos diretamente, as amplitudes dos sinais seriam facilmente distorcidas pelo meio de transmissão, e os circuitos de identificação dos diversos níveis dos pulsos sem a codificação seriam extremamente complexos, já que teríamos pelo menos cerca de 100 níveis transmitir sinais de voz. Utilizando o código binário os pulsos são codificados por dois níveis de amplitude possíveis, expresso por 1 ou 0 o que simplifica em muito os circuitos de reconhecimento destes sinais. Basicamente, o processo de codificação consiste em associar um código binário a cada segmento e a cada nível do segmento. Conforme mostrado na Figura 3.7 e 3.8 as amostras poderão pertencer a 7 segmentos e cada segmento tem 16 níveis. Para codificarmos os 7 segmentos necessitaremos de 3 bits e os níveis ao segmentos são necessários 4 bits, ou seja: SEGMENTO I I II III IV V VI VII CÓDIGO BINÁRIO 000 001 010 011 100 101 110 111 NÍVEL DE SEGMENTO 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 CÓDIGO BINÁRIO 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111 Observação: Devido ao segmento I conter 32 níveis (vide Figura 3.7 e 3.8), utilizam-se 2 códigos para indicar as amostras na primeira (níveis 1 a 16) e segunda metade (níveis de 17 a 32). UFRN – Sistemas de Telecomunicações I - 24 4.2 Palavra PCM Nos atuais sistemas PCM, o codificador converte as amplitudes dos pulsos PAM num código binário de 8 bits, que já se encontra na forma comprimida. Este código de 8 bits, que é doniminado palavra PCM, apresenta as seguintes características: 1 Polaridade 2 3 4 Segmento 5 6 7 8 Nível do segmento Bit 1 – Polaridade da amostra: Indica se a amostra encontra-se na metade superior ou inferior da curva de compressão Bit 2, 3, 4 – Segmento: Indica qual o segmento (de I a VII) dentro da metade definida pelo primeiro bit em que se encotra a amostra em questão Bit 5, 6, 7, 8 – Nível do segmento: Indica qual o nível (de 1 a 16) em que foi quantizada a amostra no segmento. É interessante observar que todo o processo da obtenção de sinais PCM ocorre no codificador, que combina as operações de amostragem, quantização, compressão e codificação Exemplos de codificação supondo todas amostras positivas 1. Amostra com valor unitário igual a 362 POLARIDADE + SEGMENTO 4 NÍVEL 7 UFRN – Sistemas de Telecomunicações I - 25 2. Amostra com valor unitário igual a 3586 POLARIDADE + SEGMENTO 7 NÍVEL 13 3. Amostra com valor unitário igual a 3710 POLARIDADE + SEGMENTO 7 NÍVEL 13 4.3 Característicasdo Multiplex TDM-PCM A característica essencialdo sinal TDM é o intervalo de tempo (time slot) que corresponde à palavra PCM de 8 bits. Ao conjunto de intervalos de tempo, associados a canais diferentes e seguindo umacerte ordem pré-fixada,que se repetem de período a paríodo, dá-se o nom de quadro (Frame). A Figuras 4.1 e 4.2 mostram a estrutura de multiplexação de um sistema PCM de N canais Time Slot 1 do Quadrol 1 Figura 4.1 – Estrutura de quadros de sinais TDM-PCM UFRN – Sistemas de Telecomunicações I - 26 MUX 1 2 3 A M O S T R A D O R DEMUX 1 F I L T R O S D A C A D C QUADRO P.B. N PALAVRAS PCM DOS CANAIS 1, 2, 3... N Figura 4.2 – Multiplexação no tempo de um sistema PCM de N canais Pela Figura 4.1 nota-se que a duração de um quadro é definida pelo tempo entre dois intervalos de tempo sucessivos, associados ao mesmo canal. O número de intervalos de tempo(time slots) dentro de um quadro define acapacidadedo sistema TDM, que está diretamente relacionada com a duração dos pulsos de amostragem, ou seja, quanto mais estreitos maior a quantidade de intervalos de tempo. Como a largura de banda de um sistema TDM depende do número de canais e da freqüência de amostragem, ao diminuirmos a largura dos pulsos, aumentamos o número de canais, o que implica na nacessidade de um meio de transmissão com faixa mais larga. Deste modo deve haver um compromisso entre a capacidade do TDM e a faixa do meio de transmissão. A Figura 4.3 mostra o diagrama de blocos do processo de multiplexação e demultiplexação em sistemas PCM Figura 4.3 – Diagrama de blocos MUX-DEMUX - PCM UFRN – Sistemas de Telecomunicações I - 27 2 3 N Da Figura 4.3 pode-se identificar os seguintes blocos: * Contador: Representa um circuito digital seqüencial que possui N estados (determinado pelas condições 0 ou 1) representado por um conjunto de flipflops internos e que excitado por um sinal de relógio (clock) a uma taxa de N*8Khz muda seqüencialmente do estado 0 ao estado N-1. * Decodificador: Representa um circuito digital combinacional que, excitado pelas saídas do contador e possuindo N saídas, ativa cada uma delas (colocando unicamente aquela em nível lógico 1) quando o contador estiver no estado de mesmo número. * Multiplexador Representa um circuito digital combinacional com 1 entrada de dados e N saídas, controlado pelas saídas do contador. * Conversor A/D e D/A O conversor A/D é o responsável pela implementação da quantização e a codificação, enquanto que o conversor D/A é o responsável pela implementação da decodificação. * Filtro Passa-Baixa (FPB) O filtro é responsável pela reconstituição do sinal analógico. 4.4 Especificações CCITT para o sistema PCM de 30 + 2 canais O sistema primário de 30 + 2 canais é recomendado pelo CCITT e adotado no Brasil através de regulamentação da Telebrás. O sinal de áudio de cada canal é filtrado em 3.400 Hz e amostrado a 8Khz. Para a geração dos sistemas PCM de 30 + 2 canais (Recomendação G732), as características e as definições correspondentes são: 4.4.1 Canal: É um conjunto de recursos técnicos que possibilitam a transmissão da informação de um ponto para outro, acarretando conseqüentemente o conceito de ligação unidirecional. Conduz um conunto de 8 bits que podem ser relativos à codificação de uma amostra de voz, ou de outras informações, tais como, sincronismo de quadro. 4.4.2 Intervalo de tempo de canal (ITC) Corresponde ao intervalo de tempo dedicado a transmissão das amostras relativas a um determinado canal. Em cada paríodo de amostragem, tem-se: T = 1/8000 = 125 µs Para transmitir 32 ITCs, tem-se ITC = 125/32 = 3,9 µs UFRN – Sistemas de Telecomunicações I - 28 4.4.3 Intervalo de tempo de bit (ITB) È o intervalo de tempo dedicado a transmissão de um bit O ITB corresponde na verdade a largura do bit. Em cada ITC, tem-se 3,9 µs, logo: ITB = 3,9µs/8 = 0,4875 µs = 488 ns 4.4.4 Velocidade de transmissão Define o número de bits transmitidos na unidade de tempo. Para calcular essa valocidade, os seguintes parâmetros são considerados: * freqüência de amostragem = 8Khz * número de bits transmitidos durante o ITC = 8 bits * número de ITCs transmitidos durante um intervalo de amostragem = 32 A velocidade de transmissão (taxa de transmissão) é dada por: 8000*8*32 = 2.048.000 bits/s ou então 2,048 Mbits/s 4.4.5 Quadro Define-se por quadro (frame) o conjunto de todos os canais enviados em um período de amostragem. Conforme pode ser visto na Figura 4.4, a estrutura de um quadro é constituída por 32 canais numerados de 0 a 31. Cada quadro possui 32*8 = 256 bits. Em cada quadro o canal 0 (zero) é utilizado basicamente para transportar o sincronismo de quadro e o canal 16 para transportar a informação de sinalização. Assim, os canais 1 a 15 e 17 a 31 são dedicados para as amostras de voz, totalizando portanto, 30 canais de voz. O quadro determina a capacidade de transmissão de um enlace. Figura 4.4 – Estrutura de um quadro UFRN – Sistemas de Telecomunicações I - 29 4.4.6 Multiquadro É a seqüencia de 16 quadros correspondentes a uma varredura completa com as informações de sinalização, sincronismo e alarme dos 32 canais com tempo total igual a: 125 µs * 16 = 2ms. Observa-se que os circuitos telefônicos necessitam transmitir sinalização de linha tais como atendimento, ocupação, etc. É necessário também que o receptor trabalhe sincronamente com o sinal recebido do transmissor a nível de bit. Para tornar isto possível, duas soluções se apresentam como possíveis: 1ª) Adicionar fios separados com o objetivo de enviar informações de sincronismo e sinalização; 2ª) Aproveitar o próprio sinal transmitido com as informações adicionais de sincronismo e sinalização. A primeira solução estaria contrariando um princípio básico adotado, quando de introdução da multiplexação que é a economia de meios de transmissão (fios, fibras, etc) A segunda solução, que é realmente utilizada, permite a extração dessas informações quando da transmissão do sinal. A Figura 4.5 mostra como são transmitidas as informações adicionais de sincronismo, sinalização e alarmes na estrutura do multiquadro. Figura 4.5 – Estrutura de um multiquadro No desenho da Figura 4.5 pode-se verificar que o canal 0 (zero), de todos os quadros, é usado para transportar informações, relativas ao sincronismo (ou alinhamento) de quadro, além de informações relativas aos alarmes. UFRN – Sistemas de Telecomunicações I - 30 A Figura 4.6 apresenta uma visão dos conteúdos do multiquadro, do quadro e de um canal, com os respectivos intervalos de tempo. Figura 4.6 – Estrutura de um multiquadro/quadro/canal 4.4.7 Sincronismo ou alinhamento do quadro Essa informação é de grande importância, pois através dela garante-se que, na recepção, os canais de voz sejam demultiplexados na seqüencia exata. De acordo com a recomendação G732 do CCITT o alinhamento de quadro é considerado perdido, quando três (3) sinais de alinhamento de quadro pares consecutivos tenham sido incorretamente recebidos. A perda de alinhamento pode acontecer em várias circunstâncias, tais como falhas do sistema (hardware e/ou software) e degradação qualitativa do meio de transmissão. O sincronismo é considerado restaurado quando da recepção de dois (2) quadros pares consecutivos de sincronismo. O tempo de espera para a recuperação do sincronismo é da ordem de 0,5 µs conforme o desenho da Figura 4.7. UFRN – Sistemas de Telecomunicações I - 31 Figura 4.7 – Tempo de recuperação de sincronismo O sinal de alinhamento de quadro será considerado recuperado quando: * pela primeira vez, no losangulo X (vide fluxograma da Figura 4.8) observar-se o sinal correto de alinhamento de quadro; * for observada a ausência de alinhamento no losango (X+1); * pela segunda vez, no losango (X+2), for observado o sinal correto de alinhamento de quadro. A falha na ocorrência de uma dessas situações determinará uma nova investigação a ser iniciada no losango (X+2). O procedimento descrito é representado no diagrama de fluxos da Figura 4.8 Figura 4.8 – Diagramde fluxo – alinhamento de quadro UFRN – Sistemas de Telecomunicações I - 32 4.4.8 Informação de alarme Nos ITCs (Intervalo de tempo de canal) 0 (zero) dos quadros ímpares, encontram-se palavras que podem acaracterizar informações particulares que normalmente representam sinais de alarmes qo equipamento terminal distante. Finalmente, pode-se representar a estrutura do canal zero (0) pela Figura 4.9 a seguir Figura 4.9 – Estrutura do canal zero Verifica-se também, pela Figura 4.9, que os quadros pares e ímpares são também denominados de A e B, respectivamente. As providências a serem tomadas em caso de falha no alinhamento de quadro são as seguintes: No terminal local X: 1. acionar alarme local; 2. bloquear a comunicação nos canais telefônicos na direção de recepção; 3. o bit 3 do intervalo de tempo do canal 0 (zero), dos quadros que não contenham a informação de alinhamento de quadro, deve ter seu estado 0 (zero) mudado para 1 (um) na direção de transmissão de X para Y; 4. indicar ao equipamento de comutação que ocorreu perda de alinhamento de quadro, para que os circuitos sejam removidos do serviço. No terminal distante Y: Quando for recebido, no terminal remoto Y, o bit 3 do intervalo de tempo do canal 0 (zero) dos quadros que não contenham o sinal de alinhamento de quadro, o estado 1 (um), indicando perda de alinhamento de quadro no terminal X, os seguintes procedimentos devem ser adotados: 1. acionar alarme local; 2. aindicar ao equipamento de comutação que ocorreu perda de alinhamento de quadro, para que os circuitos sejam removidos do serviço. UFRN – Sistemas de Telecomunicações I - 33 4.4.9 Perda de sincronismo de multiquadro Já foi visto anteriormente que o sincronismo de multiquadro é necessário apenas para a informação de sinalização de canais, servindo para identificar, na recepção, a posição exata dos canais de sinalização. O CCITT recomenda o uso do canal 16 para o sincronismo de multiquadro. No canal 16 do quadro zero (0), os bits de 1 a 4 formam a palavra de sincronismo de multiquadro. O bit número seis (6) do mesmo canal é utilizado para os alarmes de sincronismo de multiquadro, sendo o mesmo 0 (zero) ou 1 (um). Será 0 (zero) quando não houver alarme de multiquadro ou será 1 (um) quando houver alarme de multiquadro a ser transmitido. Os canais 16 dos quadros de 1 a 15 têm como função transmitir as informações referentes às sinalizações utilizadas em telefonia tais como atendimento, discagem, desligamento, etc. Assim, no canal 16 do quadro 1 os primeiros 4 bits são associados à sinalização do canal 1 e os últimos 4 bits à sinalização do canal 17. Essa distribuição serve para os demais quadros, de forma a abranger todos os canais utilizados para voz, ou seja, canal 1 a 15 e 17 a 31, conforme mostra a Figura 4.10. Pode-se verificar ainda que o canal 16 passa a funcionar como um “Canal Associado aos Canais de Voz” transmitindo a sinalização telefônica, através dos bits 1 e 3 para um canal e 5 e 7 para o outro canal, representandos pelas letras A e B na Figura 4.10. O CCITT recomenda, ainda, a utilização do canal 16 para “Sinalização por Canal Comum”; neste caso o canal 16 é utilizado para transmitir informações comuns tais como testes, rotinas, alterações de dados, etc. Figura 4.10 – Estrutura do canal 16 UFRN – Sistemas de Telecomunicações I - 34 O canal 16, a partir do quadro 1 a 15, pode ser dividido em 3 partes, conforme mostra Figura 4.11 mostrada a seguir. Figura 4.11 – byte formado pelo 8º bit do canal 16 Assim, conforme é mostrado na Figura 4.11, o bit 8 (oito) é utilizado como canal comum, transmitindo as informações comuns aos processadores. Pode-se verificar pela Figura 4.12 que os bits de número 8 de todos os quadros ímpares formando um byte que serve para escoar pacotes de forma assíncrona. UFRN – Sistemas de Telecomunicações I - 35 Figura 4.12 – Utilização dos bits 1 a 8 do canal 16 Basicamente o canal 16 pode ser dividido em 3 partes: 1ª) O quadro 0 (zero) praticamente server para transmitir as informações relacionadas ao alinhamento do próprio multiquadro. 2ª) Os bits1, 3, 5 e 7 dos quadros 1 ao 15 constituem-se no Canal Associado aos Canais de Voz, utilizado para transporte de sinalização tais como: discagem, inversão de polaridade, corrente de toque, atendimento, desligamento, etc. 3ª) O oitavo bit do canal 16 dos quadros ímpares, constitui o conjunto de “Sinalização por Canal Comum”, transmitindo as informações entre os processadores envolvidos nos extremos da chamada telefônica. 5. Transmissão 5.1 Introdução Já foi visto que as amostras do sinal a ser transmitido têm que ficar sincronizadas com o temporizador no lado de recepção, possibilitando, na demultiplexação, que o grupo de oito bits seja separado na seqüência correta. No momento da transmissão, o sinal PCM necessita passar por uma importante etapa antes que possa ser acoplado à linha. Observa-se, por outro lado, que o sinal processador num sistema PCM, apresenta-se sob código binário na forma NRZ (No Return to Zero), conforme o desenho da Figura 5.1 Figura 5.1 – Código binário na forma NRZ UFRN – Sistemas de Telecomunicações I - 36 Verifica-se pela Figura que os pulsos ocupam todo o intervalo de tempo de um canal, logo o intervalo de tempo de bit é t = 3,9µs/8 = 488 ns. O código NRZ, no entanto, não é aconselhável para o envio à linha de transmissão devido a diversos motivos, entre os quais destacamos os seguintes: * componente de CC introduzida na linha, o que impende o uso de transformadores de acoplamento necessários aos repetidores regenarativos; * alta freqüência de pulsos de mesma amplitude, ocasionando grande atenuação do sinal de linha; * conteúdo de energia do sinal de linha, relativamente grande, devido a amplitudo dos pulsos ocuparem todo o intervalo de tempo t (Figura 5.1) 5.2 Codificação de Linha Devido a esses fatos, foram realizadas pesquisas no sentido de se criar códigos conhecidos também como Códigos de Linha com o objetivo de atenuar esses efeitos. Assim, o estudo foi desenvolvido para obter os seguintes resultados, como conseqüência natural dos motivos anteriores. 1º) não permitir a existência de componentes contínuas, no Código de Linha, pois os transformadores bloqueiam essas componentes; 2º) utilizar nas entradas dos regeneradores filtros que possibilitam a atenuação das baixas freqüências; 3º) redução da energia dos componentes de alta freqüência. Uma forma para atender aos objetivos definidos é a conversão do trem de pulsos PCM de unipolar para bipolar, eliminando conseqüentemente, a componente CC, além de colocar a maior parte da energia do sinal PCM à metade da velocidade de transmissão. O uso do sinal bipolar também possibilita a redução de energia das componentes de alta freqüência, reduzindo a diafonia. Observa-se um outro ganho importante, pois o sinal bipolar corresponde a uma freqüência maior, incidindo diretamente na transferência do limite infererior de CC para uma freqüência mais elevada, tornando o sinal menos suscetível a interferências. Um dos códigos inicialmente desenvolvido para a transmissão do sinal é o AMI (Alternate Mark Inversion) também conhecido como bipolar. 5.3 Transformação do NRZ para AMI O código AMI que poderia ser traduzido como Marcas Alternadas Invertidas, apresenta as seguintes etapas: * Transformação dos pulsos NRZ para RZ (Return to Zero) Nesse caso os pulsos positivos correspondentes ao valor binário “1” passam a ocupar a metade do tempo do bit. Assim o pulso passa a ter a largura de 488ns/2 = 244 ns. UFRN – Sistemas de Telecomunicações I - 37 * Inversão de polaridade dos pulsos aternados Os pulsos apresentam dois níveis de tensão, positivo e negativo que são transmitidos alternativamente. Dessa forma nunca poderão existir dois pulsos consecutivos de mesma polaridade, conforme ilustra o desenho da Figura 5.2 Pode-se verificar ainda pelo desenho da Figura 5.2 que o sinal bipolar possui na verdade três estados possíveis: * positivo; * negativo; * zero. Figura 5.2 – Passagem do código NRZ Acontece, no entanto, que se trata efetivamente de um sinal binário, onde os pulsos positivos e negativos representam “marca” e o zero representa espaço. Por esta razão o sinal é também chamado pseudoternário. Uma das vantagens do sinal AMI é a possibilidade de eliminação da componente CC, porém possui também algumas desvantagens do ponto de vista de sincronização. Pode-se observar que os próprios pulsos PCM são usados para sincronizar os geradores de relógio nos regeneradores. Acontece, porém, que o sinal PCM é constitupido por uma seqüêcia aleatória de 1s e 0s, havendo, portanto, a possibilidade de que uma longa sucessão de zeros (0) deixaria os geradores de relógio sem sincronismo. Para evitar isso, outras formas de sinal ou código foram desenvolvidas. Um desses códigos, que tembém é recomendando pelo CCITT (Recomendação G703), é denominado HDB-3 (HIGH DENSITY BIPOLAR – 3). O código HDB-3 é na verdade uma complementação do código AMI, e tem por finalidade evitar seqüência longa de zeros. Para prevenir contra um grande número de 0s (zeros) na linha, introduz-se um pulso “V” (violação de bipolaridade) com sinal igual ao pulso anterior. As regras de codificação de HDB-3 são as seguintes (acompanhar com a UFRN – Sistemas de Telecomunicações I - 38 Figura 5.3) * (1) Necessário existir 4 “zeros” consecutivos na linha; * (2) Duas são as possibilidades para a codificação; - (2.1) Violação anterior “V” foi de sinal oposto ao “1” imediatamente anterior aos quatro “zeros”. Neste caso adiciona-se o pulso de violação após o terceiro zero, com polaridade igual ao pulso “1” anteriores - (2.2) Violação anterior “V” foi do mesmo sinal que o “1” imediatamente anterior aos quatro “zeros”. Nesse caso o primeiro intervalo após o “1” é também um dígito “1” de polaridade oposta ao pulso anterior, denominado de pulso falso. Os dois intervalos seguintes serão zero, seguido de um pulso “V” de mesma polaridade que o pulso falso. Assim, pode-se concluir que a adição de pulsos de violação e pulsos falsos, tem como objetivo quebrar a alternância de polaridade no conjunto de quatro zeros e, ao mesmo tempo, manter a componente CC praticamente igual a zero ao longo do trem de pulsos do sinal PCM. Figura 5.3 – Código HDB3 Resumindo: * O 2º e 3º espaços da seqüência serão sempre representados por zeros * O 4º espaço da seqüência será sempre substituído por uma violação (um pulso de mesma polaridade que o último pulso do sinal). * O 1º espaço da seqüência será sempre substituído por uma marca (pulso de UFRN – Sistemas de Telecomunicações I - 39 polaridade oposta ao último pulso presene no sinal) somente quando o pulso que o precede imediatamente for uma marca de polaridade igual a da última violação ocorrida, ou se constituir uma violação em si, caso contrário será representada por um zero. O fluxograma da Figura 5.4 mostra simplificadamente os passos que devem ser tomados quando do aparecimento de quatro zeros consecutivos. 1º espaço: Verificar a violação precedente NÃO É de mesma Polaridade que a marca precedente? SIM Codificar como marca B+ ou B- sem violação Codificar como espaço (Zero) 2º e 3º espaços codificar como espaços (zeros) 4º espaço codificar como violação V+ ou V- Figura 5.4 – Fluxograma de codificação de linha HDB3 5.4 Regeneração do sinal Um ponto altamente favorável à transmissão digital frente a analógica é a possibilidade de reconstruir o trem de pulsos transmitidos após o mesmo ter passado por um meio de transmissão dispersivo e ruidoso. O processo de reconstituição é realizado através de repetidores (regeneradores) localizados ao longo da linha, a distâncias previamente determinadas. A distância entre regeneradores depende do tipo de cabo, sendo da ordem de 2 a 3 Km. UFRN – Sistemas de Telecomunicações I - 40 A Figura 5.5 mostra um diagram em blocos do regenerador. Verifica-se que os pulsos, distorcidos e atenuados devido às perdas da linha de transmissão, passam após o acoplamento por um circuito equalizador e amplificador com o objetivo de modelar e aumentar o nível do sinal de entrada. O circuito do relógio utiliza pulsos extraídos do sinal de entrada os quais são utilizados para definir os tempos de decisão. Mais uma vez pode-se enfatizar o porquê de se utilizar o código HDB-3, visto que o relógio poderia perder o sincronismo caso houvesse uma longa seqüêcia de zeros. O circuito regenerador verifica, nos instantes de decisão, se o sinal de entrada excedeu o nível de decisão, para então, fornecer um novo pulso de saída. Figura 5.5 – Diagrama de blocos do regenerador 5.5 Circuito de relógio É interessante observar como se processa a extração do sincronismo do relógio, partindo do sinal da linha, cujo diagrama em blocos é mostrado na Figura 5.6 Figura 5.6 – Circuito de Relógio O sinal vindo do amplificador equalizador é aplicado a um retificador de onda completa, cuja saída apresenta a forma de onda de Figura 5.7B Esse sinal é então encaminhado a um circuito sintonizado de altíssimo Q, da ordem de 15, centrado na freqüência f = 2048 Khz. A saída do filtro passafaixa fornece o sinal senoidal na freqüência de sintonia, conforme o sinal da Figura 5.7C. Observe a existência de um circuito tanque que oscila UFRN – Sistemas de Telecomunicações I - 41 Figura 5.7 – Formas de onda do circuito de relógio UFRN – Sistemas de Telecomunicações I - 42 naturalmente com uma amplitude que dacai exponencialmente, até que um novo pulso o estimule novamente. Essa operação é ilustrada na Figura 5.6C' onde evidencia que a distância entre os pulsos não pode ser muito grande. O sinal senoidal é então aplicado a um circuito conversor de onda senoidal em quadrada (Figura 5.7D), cuja saída está ligada a um circuito diferenciador, obtendo-se finalmente o sinal de relógio (Figura 5.7E) 5.6 Representação das fases do sistema PCM em níveis homólogos UFRN – Sistemas de Telecomunicações I - 43 Bibliografia 1. Jeszensky, P. J. E., Sistemas Telefônicos, Editora Manole, 2004. 2. Wandel & Golterman., Modulação por Código de Pulsos – Técnicas e Instrumentos de Medições, Editora Latinoamericana, 1981. 3. Apostila Promon – Princípios Básicos de PCM, 1997. 4. Notas de Aula – Sistemas de Telecomunicações I 5. http://paginas.terra.com.br/lazer/py4zbz/ 6. http://w3.ualg.pt/~sjesus/aulas/pds/node7.html 7. http://www.eppet.pt/data/linkserv/telei/curso_telei/m1_43.html UFRN – Sistemas de Telecomunicações I - 44 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE SISTEMAS DE TELECOMUNICAÇÕES I PCM – PULSE CODE MODULATION Departamento de Engenharia Elétrica UFRN – Sistemas de Telecomunicações I - 45
Download