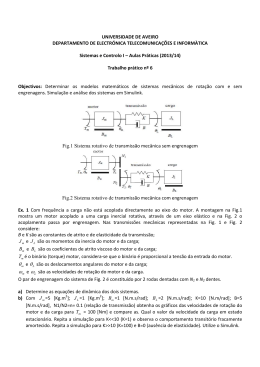
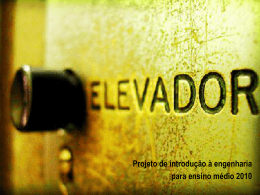
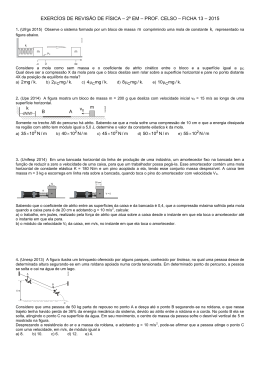
UNIVERSIDADE DE AVEIRO DEPARTAMENTO DE ELECTRÓNICA TELECOMUNICAÇÕES E INFORMÀTICA Sistemas e Controlo I – Aulas Práticas (2015/16) Trabalho prático nº 6 Objectivos: Determinar os modelos matemáticos de sistemas mecânicos de rotação com e sem engrenagens. Simulação e análise dos sistemas em Simulink. Fig.1 Sistema rotativo de transmissão mecânica sem engrenagem Fig.2 Sistema rotativo de transmissão mecânica com engrenagem Ex. 1 A montagem na Fig.1 mostra um motor acoplado a uma carga inercial rotativa, através de um eixo elástico e na Fig. 2 o acoplamento passa por engrenagem. Nas transmissões mecânicas representadas na Fig. 1 e Fig. 2 considere: Tm é o binário (torque) motor proporcional a tensão da entrada do motor. J m e J L são os momentos da inercia do motor e da carga; θ m e θ L são os movimentos angulares do motor e da carga; ω m e ω L são as velocidades angulares do motor e da carga. Bm e BL são os coeficientes de atrito viscoso do motor e da carga; B e K são as constantes de atrito e de elasticidade da transmissão; O par de engrenagem (Fig. 2) é constituído por 2 rodas dentadas com N1 e N2 dentes. a) Determine as equações de dinâmica dos dois sistemas e implemente os sistemas em Simulink. b) Considere J m =5 [Kg.m2]; J L =1 [Kg.m2]; Bm =1 [N.m.s/rad]; BL =2 [N.m.s/rad]; K=10 [N.m/rad]; B=5 [N.m.s/rad], N1/N2=n= 0.1 (relação de transmissão). Obtenha os gráficos de ω m e ω L do motor e da carga quando ao longo de 20s. foi aplicado um binário Tm =100 [Nm]. Qual a velocidade angular que a carga atinge? Repita as simulações para: • K<<10 (K=1) e observa o comportamento transitório fracamente amortecido. • K>>10 (K=100) e B=0 (ausência de elasticidade). Appendix A: Sistemas mecânicos de rotação: massa - mola –atrito (elementos passivos) • Quando um binário (uma força rotativa) é aplicado a uma mola, a mola é torcida de um determinado ângulo. O binário resistente que a mola produz é proporcional ao ângulo de torção relativo aos dois extremos da mola. A mola (elemento elástico) é um armazenador indutivo de energia. k- constante de elasticidade da mola Tmola = k (θ1 − θ 2 ) , (quando maior for k menos elástica/mais rígida a mola) • Num sistema de rotação o atrito produz um binário inercial proporcional a velocidade de rotação. O atrito dinâmico é um dissipador de energia. Tatrito = Bω , B -coeficiente de atrito, ω = θɺ • A aceleração angular de uma massa com momento de inercia J é proporcional a soma de todos os binários que actuam no sistema rotativo. A massa é um armazenador capacitivo de energia. TJ = Jωɺ = ∑ Ti , J=Mr2 i Appendix B: Sistemas de rotação com engrenagem mecânica Um sistema de rotação com engrenagem mecânica inclui um par de rodas dentadas com raios r1 , r2 e número de dentes N1 , N 2 . A função da engrenagem é aumentar o binário à custa de uma perda de velocidade ou aumentar a velocidade angular perdendo binário. Para um par de engrenagem ideal o tamanho dos dentes das rodas é igual e não há perdas por atrito nos dentes. As velocidades de rotação ( ω1 , ω2 ) e respectivamente os ângulos de rotação ( θ1 , θ 2 ) da engrenagem primaria e secundaria são diferentes. Do lado da engrenagem primária ( r1 , N1 ) é produzido binário T1 que é transformado em binário T2 do lado da engrenagem secundaria ( r2 , N 2 ). A relação entre os dois binários: N T1 (t ) = nT2 (t ), n = 1 N2 A potência no primário é igual à potência no secundário. T1ω1 = T2ω2 A distância linear percorrida pelos pontos periféricos de cada uma das rodas dentadas é igual: θ1r1 = θ 2 r2 O número de dentes em cada roda da engrenagem é proporcional ao raio da roda: r1 N 1 . = r2 N 2 Relação geral das variáveis de um par de engrenagens ideal: T1 (t ) θ 2 (t ) N1 r1 = = = T2 (t ) θ1 (t ) N 2 r2
Baixar