Mecânica e Ondas
Trabalho I
Movimentos Oscilatórios num sistema Massa-Mola
Objectivo
Determinação da constante elástica de um mola. Estudo dos movimentos do sistema
massa-mola.
1. Introdução
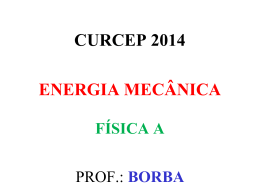
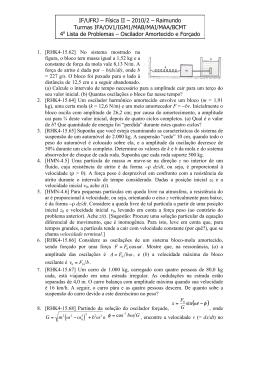
O sistema a estudar está ilustrado nas fotos da figura 1 e consiste numa mola suspensa
Figure 1: Fotos da montagem a utilizar
num fio e que por sua vez suporta uma barra, com uma massa de 50g, com uma parte
plástica, onde se encontra uma escala graduada em milímetros, e uma parte em
alumínio. O fio que suspende o conjunto encontra-se ligado, com o auxílio de duas
roldanas, a uma pequena barra montada no eixo de um disco na unidade de base da
montagem.
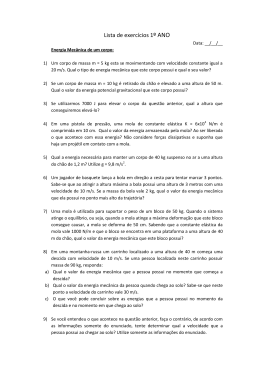
Controlando o ponto em que o fio se encontra ligado ao disco e a velocidade
de rotação do disco podemos controlar a força de oscilação que se aplica ao sistema
massa-mola. A montagem pode ser esquematizada de acordo com a figura 2.
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
1
Figura 2: Esquema da montagem
A mola que se utiliza neste trabalho consiste numa espiral metálica cujo
comprimento depende da massa que nela se encontra suspensa. De acordo com a Lei
de Hook a força que a mola exerce é directamente proporcional à variação do seu
alongamento. Se l0 for o comprimento natural da mola então podemos escrever
r
r
r
Fel = − K(l − l0 )ez = − KΔzez
(1)
Δz = z − d − l0
(2)
€
onde K é constante elástica.
1.1 Situação de equilíbrio €
Numa situação de equilíbrio tem-se que o peso da barra iguala a força elástica
da mola e portanto
r
r
(3)
P = −Fel
Como P = mg e, de acordo com (2), temos Δzeq = zeq − d − l0 obtém-se a posição de
equilíbrio
m
(4)
zeq =€ g + (d + l0 )
K
€
€
m
(4a)
Δl = g
K
€ suspensa na mola e g a aceleração da gravidade.
onde m é a massa
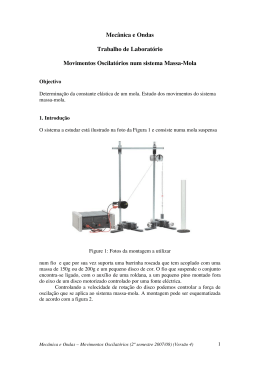
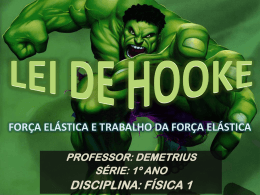
A equação (3) pode ser utilizada para determinar a constante elástica da mola
a partir do declive da€recta definida por um conjunto de pares de valores (Δl,m) como
no exemplo da figura 3.
€
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
2
Figura 3: Variação de Δl com m. Recta obtida por ajuste segundo o
método dos mínimos quadrados
€
1.2 Regime oscilante livre amortecido
Numa situação que o sistema não está em equilíbrio a força total exercida no
sistema tem uma resultante que depende do tempo e que se pode escrever da forma
r
r r
r
Ftotal = P + Fel + A
(5)
r
onde para além do peso temos que contar com a força de atrito A . Ou seja
€ r
d 2z r
dz r
Ftotal = m 2 ez = mg − KΔz − b ez
dt
dt €
(6)
onde b é o coeficiente de atrito que depende do meio
r (neste caso ar) em que a massa
se move e da forma do objecto. A força de atrito A tem apenas um termo linear na
€
velocidade porque as velocidades são pequenas1. Em física utiliza-se muitas vezes
uma outra notação mais compacta para as derivadas de uma função em ordem ao
tempo
€
dz
= z˙(t)
dt
(7)
d 2z
= ˙z˙(t)
dt 2
o que permite, reordenando os termos, escrever a equação (6) da forma
€ m˙z˙(t) + b˙z(t) − mg + KΔz(t) = 0
(8)
Como com o auxílio de (4) podemos escrever
€
1
Para velocidades mais elevadas (ex: avião, foguetão,…) ter-se-iam de considerar termos de
ordem superior na velocidade, i.e. termos dependentes do quadrado, cubo,…etc. da
velocidade.
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
3
Δz(t) = z(t) − zeq +
m
g
K
(9)
então
m˙z˙(t) + b˙z(t) − K ( z(t) − zeq ) = 0
(10)
€
e fazendo a mudança de variável Ζ(t) = z(t) - zeq que corresponde a medir a amplitude
das oscilações em relação ao ponto de equilíbrio temos
€
˙˙ (t) + b Ζ˙ (t) + K Ζ(t) = 0
(11)
Ζ
m
m
€ obtém tem a designação de equação diferencial homogénea
A equação que se
do 2º grau e relaciona na mesma equação a função Z(t) com as suas 1ª e 2ª derivadas o
que em geral torna um pouco mais difícil a sua resolução. Para a resolvermos
€
podemos começar
por escreve-la na seguinte forma
˙˙ (t) + 2 λΖ˙ (t) + ω 02 Ζ(t) = 0
Ζ
(12)
em que
b
2m
€ coeficiente de amortecimento e
tem a designação
€ ω0 =
λ=
(13)
K
= 2πf 0
m
(14)
tem a designação de frequência própria do sistema. Um pouco à semelhança do
processo do cálculo da primitiva de funções a resposta à pergunta “Qual é a função
€
Z(t) que satisfaz
a equação (12)?” passa por encontar uma função cuja 1ª e 2ª
derivadas seja idêntica a ela própria. Facilmente se verifica que uma função do tipo e t
satisfaz essa condição. Vejamos: se
(15)
Z(t) = Z 0e st
em que Z0 e s são constantes, então
€
Z˙ (t) = sZ(t)
e
Z˙˙(t) = s2 Z(t)
€
(16)
donde substituindo (15) e (16) em (12) obtém-se
€
s2 Z(t) + 2 λsZ(t) + ω 02 Z(t) = 0
(17)
Para (17) poder ser válida para qualquer instante de tempo temos de ter
€
s2 + 2 λs + ω 02 = 0
(18)
s = −λ ± λ2 − ω 02
(19)
ou seja
€
Para que a equação (15) possa ser solução da equação (12) o parâmetro s tem
de ser uma raiz do polinómio de 2º grau (18). Existem 3 casos possíveis: i)
€
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
4
λ>ω0, ii) λ=ω 0 e iii) λ<ω0. Os casos (i) e (ii) correspondem a valores de s reais e
conduzem a funções Z(t) que são combinações lineares de exponenciais decrescentes
no tempo. Nestes dois casos não são observadas oscilações no sistema. Esta situação
podem encontrar-se em sistemas com atrito muito elevado. O caso (iii) é o mais
interessante para este trabalho. Os valores de s são números complexos que conduzem
a funções oscilantes amortecidas. De facto (19) pode ser escrita na forma
s1,2 = − λ ± j ω 02 − λ2 = − λ ± jω
(20)
com
ω = ω 02 − λ2
(21)
€
e a solução de (12) escreve-se então da forma
€ Z(t) = A e− λt e jωt + A e− λt e− jωt
1
2
(22)
A
A
Se considerearmos que A1 e A2 se podem escrever da forma A1 = 0 e jϕ , A2 = 0 e− jϕ e
2
2
€
jϕ
− jϕ
jϕ
− jϕ
e −e
e +e
que a partir das expressões de Euler cos(ϕ ) =
e sin(ϕ ) =
se tem
2j
2
e jϕ = cos(ϕ ) + j sin(ϕ ) podemos após algumas manipulações
€
€ algébricas escrever a
equação (22) na forma equivalente
€
€
Z(t) = A0e− λt cos(ωt + ϕ )
€
(23)
2π
(23a)
T
€ A e ϕ só são definidas conhecendo a posição e a velocidade da massa
As constantes
0
num determinado instante do tempo (usualmente o instante inicial). T é o período de
oscilação dos sistema.
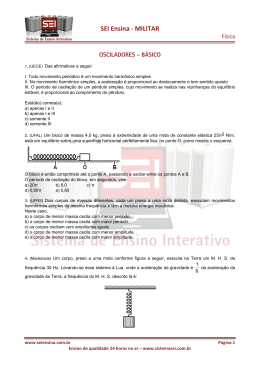
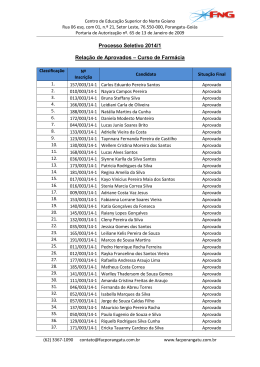
Na figura 4€ilustra-se a evolução da amplitude máxima de oscilação da massa
em torna da posição de equilíbrio.
ω=
Figura 4: A curva a cheio ilustra a evolução da amplitude máxima de
oscilação em torno da posição de equilíbrio AM (t) = A0e− λt . A curva a
tracejado representa a equação (23).
Mecânica e Ondas – Movimentos Oscilatórios (2º€semestre 2006) (Versão 6.3.14-1)
5
1.3 Regime forçado
Quando o disco a que está ligado o fio que suporta o sistema massa e mola roda com
uma certa velocidade angular ω a o fio que suporta a mola oscila com a frequência
ω
(24)
fa = a
2π
€
e força a massa a oscilar com essa frequência (ver figura 5). Acontece que a
amplitude de oscilação depende da frequência da rotação do disco. Para compreender
de que forma a amplitude €
varia com a frequência convém começar por reescrever a
equação de equilíbrio de forças aplicadas à massa tendo em conta a força excitadora
Fext. A equação (6) modifica-se e toma a seguinte forma
m
r
d 2z r
dz
e = mg − KΔz − b − F0 cos(ω a t)ez
2 z
dt
dt
(25)
€
Figura 5: Sistema com oscilação forçada
donde se obtém
˙˙ (t) + 2 λΖ˙ (t) + ω 02 Ζ(t) = F0 cos(ω a t)
(26)
Ζ
m
com λ e ω0 dados pelas expressões (13) e (14).
A solução mais geral desta equação pode ser escrita como a soma de dois
termos Ζ(t) = Ζ livre (t) + Ζ forçado (t) . Ζ livre (t) corresponde à situação em que não há força
€
exterior (regime livre). Ζ forçado (t) corresponde à solução particular da equação (26) e
que se pode escrever da forma
€
€
Mecânica e Ondas
€ – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
6
Ζ forçado (t) = AM cos(ω a t − α )
(30)
A amplitude A M pode ser obtida substituindo (30) na equação (26) e simplificando
com o auxílio da identidade e ja = cos(a) + j sin(a) . Obtém-se a seguinte expressão
€
F
1
(31)
AM = 0
m ω 2 − ω 2 2 + 4 λ2ω 2
( 0 a)
a
€
Para
(32)
ω a = ω aR = ω o2 − 2 λ2
€
verifica-se que a amplitude AM é máxima e tem-se uma situação que se designa por
ressonância. A frequência
€
ω
(33)
f aR = aR
2π
designa-se por frequência de ressonância. Quando o coeficiente de amortecimento λ
é pequeno (o que pode corresponder a pequenos atritos e/ou grandes massas) tem-se
que na ressonância a amplitude de oscilação do sistema pode atingir valores que
€ deste género podem ocorrer em pontes e viadutos, asas
destruam o sistema. Situações
dos aviões, quando as forças exteriores induzem oscilações com frequências próximas
das frequências próprias desses sistemas.
A expressão (31) pode ser ajustada, pelo método dos mínimos quadrados a
um conjunto de dados experimentais permitindo a determinação simultanea dos
valores da frequência própria do sistema (f0), coeficiente de amortecimento (λ ) e A0
(ver exemplo da figura 6).
Figura 6: Curva de ressonância obtida por ajuste pelo método dos mínimos
quadrados da expressão (31) a um conjunto de dados experimentais
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
7
2. Trabalho experimental
1) Para o trabalho experimental convém verificar a seguinte lista de material:
1. Uma mola
2. Uma barra com escala graduada com massa de 50g
3. Duas massas de 50g
4. Caixa com diferentes massas
5. Dois magnetos permanentes
6. Sistema Pasco
2) O sistema Pasco tem de se encontrar alinhado de forma a que a barra não toque
em nenhuma das partes do sistema. Para tal pode ajustar dois dos três pés que
suportam o sistema.
3) Aproximadamente a meio da coluna que suporta o fio/mola/massa encontra-se
uma dispositivo que contém um pequeno “LED” (“ligh emiting diode”) vermelho
e uma célula fotoeléctrica entre os quais pode oscilar a barra com a escala
graduada. A função do par LED/célula fotoeléctrica é permitir medir e detectar a
amplitude e período das oscilações – detector de movimento. Conforme o tipo de
medidas que se pretende efectuar poderá alinhar a barra com a escala graduada de
forma a que o meio da escala fique exactamente entre o par LED/célula ou então
alinhar a extremidade da barra com o suporte do par LED/célula. Esse ajuste pode
ser conseguido variando o comprimento do fio que suporta a mola.
Figura 7: LED/Célula
2.1 Determinação da constante elástica da mola
1) Efectue a medição dos alongamentos da mola para um conjunto de 5 ou seis
massas diferentes. Pode começar por suspender uma massa inicial de 50g e
aumentar o valor da massa suspensa na mola de 10g em 10g. Tenha em
atenção que para além dos erros sistemáticos que pode estar a introduzir nas
medidas por causa da paralaxe na leitura da escala, comete um erro de leitura
que nunca será inferior a metade da menor divisão da escala (mas pode ser
superior).
2) No computador que está junto da montagem pode executar o programa OneFit
(1fit) que lhe permite efectuar um gráfico com os dados experimentais que
obteve.
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
8
a) No botão Fitenv comece por escolher o tipo de ambiente de ajuste que
quer, neste caso uma recta,.
b) Edite o ficheiro de dados (em geral o nome do ficheiro tem a extensão
“.dat”). Os dados são introduzidos em três colunas com os valores de
x, y, erro de y separados por espaços (mas não tabs). Linhas em
branco começadas por “#” são comentários.
c) Pode de seguida fazer um Fit (ajuste da recta aos pontos experimentais
de utilizando o método dos mínimos quadrados).
d) Finalmente Plot e “AS” (dentro do programa de gráficos) para escalar
automaticamente o gráfico. Pode modificar o seu plot de muitas
maneiras. Em Window->Drawing objects->Text pode sobrepor texto
no gráfico. Os comandos {\S, \s, \N, \x, \0} permitem inserir subir um
caracter, descer um caracter, posiciona-lo normalmente, mudar para
letras gregas, mudar para letras romanas, respectivamente.
e) Os parâmetros de ajuste aparecem no quadro central do programa na
coluna Value
f) Os erros dos parâmetros de ajuste podem ser obtidos no fim do ficheiro
de extensão “.log”. na coluna com a designação “PARABOLIC
ERROR”ou mais simplesmente clicando em “Get Errors”
3) Calcule a constante elástica a partir do declive da recta. Pode também estimar
o erro propagado do declive da recta para o valor da constante elástica.
2.2 Determinação do coeficiente de amortecimento
1) Coloque uma massa de 50g na barra (atenção que a barra tem uma massa de
50g). Ajuste os magnetos de forma a obter um atrito que contribua para
atenuar o movimento de oscilação livre do sistema num tempo de cerca de 3060s.
2) Ajuste a posição da barra de modo a que o meio da barra coincida com a
posição do LED.
3) Meça o período T de oscilação livre do sistema seleccionando essa função no
selector do painel de medida.
4) Compare o valor da frequência própria das oscilações com o valor esperado
calculado a partir da expressão (14).
5) Seleccione de seguida a função de medida de amplitude de oscilação
6) Coloque o sistema a oscilar livremente evitando que a barra fique a tocar nas
paredes do detector de movimento.
7) Verifique que o LED vai acender e apagar cada vez que a barra executa uma
oscilação completa. Assim, pode usar o número de vezes n que o LED acende
para contar o tempo t = nT .
8) Colocando o sistema a oscilar registe sucessivamente o valor de amplitude
indicado no painel e o nº de vezes que o LED acendeu até esse momento. Por
exemplo pode escolher registar amplitudes de 2 em 2 vezes que o LED
€
acende.
9) Faça uma estimativa do erro que pode cometer nas medidas de amplitude que
efectuou.
10) Em Fitenv->Open comece por escolher o ambiente de ajuste apropriado (neste
caso o mov-amortecido.env) e siga um procedimento semelhante ao utilizado
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
9
em 2.1-2. Faça um gráfico de amplitude em função de tempo. Verifique que
de acordo com a equação (23) a amplitude varia segundo uma exponencial
decrescente com tempo A = A0e− λt . Utilize o programa de ajuste para
determinar o valor do coeficiente A0 e do coeficiente de amortecimento λ.
11) (Opcional) Pode variar as condições de atrito verificar quais as alterações no
valor da constante de amortecimento.
€
2.3 Determinação da frequência de ressonância do sistema
1) Ajuste a barra do mesmo modo que fez para determinar o coeficiente de
amortecimento. Utilize uma das condições de atrito que utilizou em 2.2.
Escolha um valor de excentricidade do ponto de ligação do fio ao disco entre 2
e 5 mm.
2) Verifique que o controle de velocidade do motor da montagem está no
mínimo. Ligue-o e varie a frequência de rotação de forma a detectar o valor
dessa frequência para o qual a amplitude de oscilação é máxima.
Compare o
valor obtido com o valor esperado calculado a partir do valor da constante
elástica obtida em 2.1 e utilizando a expressão (14).
3) (Opcional) Registe os valores de frequência e amplitude de oscilação para
valores inferiores e superiores à frequência de ressonância. Efectue um ajuste
da função (31) aos seus dados experimentais (pode escolher em Fitenv->Open
comece por escolher o ambiente de ajuste apropriado, neste caso o
ressonancia.env e proceder como em 2.1 e 2.2). Considere nessa expressão
F
que 0 é uma constante A 0. Compare os valores da frequência própria e do
m
coeficiente de amortecimento obtidos do ajuste com os valores obtidos em 2.1
e 2.2.
€
Bibliografia
• Contribuição para o Desenvolvimento do Ensino da Física Experimental no
IST, A. Ribeiro, P. Sebastião, F. Tomé, Departamento de Física do IST
(1996).
• Tratamento e Apresentação de Dados Experimentais, M. R. da Silva, DF, IST,
2003
• Introdução à Física, J. Dias de Deus, M. Pimenta, A. Noronha, T. Peña, P.
Brogueira, McGraw-Hill (1992).
• Physics, For Scientists and Engenieers with Modern Physics, 5 ed. Raymond
A. Serway, Robert J. Beichner, Saunders College Publishing, 2000, ISBN: 003-022657-0
• University Physics, H. Young, R. Freedman, 9th ed., Addison-Wesley, New
York, 1996.
• The Art of Experimental Physics, D. Preston, E. Dietz, John Wiley, New
York, 1991.
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
10
Mecânica e Ondas
Relatório - Trabalho I
(destaque para entregar no fim da aula ao docente)
Movimentos Oscilatórios num sistema Massa-Mola
Nº
Nome
Data
Turno
Curso
Grupo
1. Objectivo deste trabalho:
2. Determinação da constante elástica da mola
m (kg)
Δl (m)
Erro Δl (m)
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
11
2.1 Valor da constante elástica obtido a partir do ajuste da expressão Δl =
g
m aos
K
dados experimentais pelo método dos mínimos quadrados:
€
K = ___________________________
2.2 Valor da frequencia própria do sistema só com a barra que tem uma massa de 50g:
ω 0 = _________________________; f 0 = ________________________
2.3 Valor da frequencia própria do sistema só com a barra e uma massa de 50g:
€
€
ω 0 = _________________________; f 0 = ________________________
€
3
Determinação do coeficiente de amortecimento do sistema
€
Massa total suspensa na mola:__________________
Valor do período de oscilação:__________________
t (s)
Α (m)
Erro Α (m)
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
12
3.1 Valor do coeficente de amortecimento e da amplitude inicial obtidos a partir do
ajuste da expressão A = A0e− λt aos dados experimentais:
λ = _________________
€
A0 = _________________
3.2 Qual o valor da constante elástica estimado a partir do período de oscilação livre,
assumindo que λ é pequeno comparado com ω 0 .
K=______________
€
Qual é a influência do valor de λ na estimativa de K? Comente atendendo às
expressões para a frequência própria do sistema e para a frequência de oscilação
no regime oscilante livre amortecido:
3.2.1
Que diferenças observará se utilizar outras condições de atrito? E se utilizar
outra massa?
3.3 (Opcional) Experimente para outras condições de atrito.
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
13
4
Determinação da frequência de ressonância do sistema
(utilize as mesmas condições de atrito e massa do ponto 3.
Valor da excentricidade do ponto de ligação do fio ao disco:____________
fa(Hz)
ΑΜ (m)
Erro ΑΜ (m)
4.1 Estime o valor da frequência de ressonância a partir da observação dos valores de
amplitude em função da frequência de excitação:
fR = ________________.
4.2 Estime a frequência própria do sistema a partir da frequência de ressonânia
assumindo que λ é pequeno comparado com ω 0 :
€
fo = ________________.
Compare o valor obtido com aquele que calculou a partir da constante elástica da
mola. Comente e diga como é que poderá estimar o valor do coeficiente de
amortecimento:
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
14
4.3 Que diferenças observará se utilizar outras condiçoes de atrito? E se utilizar outra
massa?
4.4 (Opcional) Valor do coeficente de amortecimento, da amplitude inicial e da
frequência própria do sistema obtidos a partir do ajuste da expressão
AM =
A0
(ω
2
0
−ω
2 2
a
)
aos dados experimentais:
2
+ 4λ ω
2
a
λ = _________________
A0 = ________________
€
f0 = _________________
Compare estes valores com os que obteve no pontos 1 e 2.
5
Conclusões
Mecânica e Ondas – Movimentos Oscilatórios (2º semestre 2006) (Versão 6.3.14-1)
15
Baixar