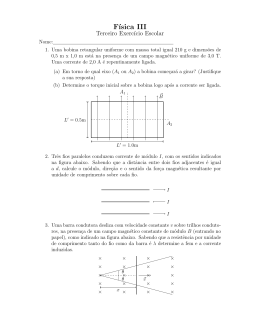
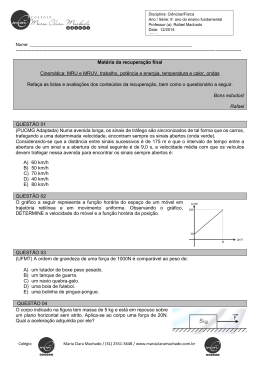
Capı́tulo 3 Oscilações Após nosso estudo prévio de rotações de corpos rı́gidos, agora nos voltamos para outro tipo de movimento. O movimento oscilatório. Este movimento corresponde a vibrações localizadas em torno de um ponto de referência. A importância do estudo deste tipo de movimento é óbvia quando observamos que tudo à nossa volta apresenta movimento oscilatório. Podemos citar como sistemas mecânicos, onde ocorrem oscilações, pêndulos, diapasões, cordas de instrumentos musicais e colunas de ar de instrumentos de sopro. Em sistemas elétricos, a corrente alternada de que nos servimos também é oscilatória e temos vários exemplos de circuitos elétricos onde a oscilação desempenha papel importante. 3.1 O Movimento Harmônico Simples (MHS) Nos problemas do capı́tulo anterior fizemos uso do princı́pio de conservação de energia mecânica, que nos diz que a soma das contribuições das diferentes energias do sistema permanece constante. Lembramos que a variação da energia potencial (∆U ) é igual ao negativo do trabalho W feito pela força que atua sobre o sistema, assim escrevemos: ∆U = −W. (3.1) No caso de forças conservativa atuando sobre o sistema, então a energia potencial do sistema é convertida em energia cinética, de modo que a soma das duas contribuições permanece fixa no tempo. Assim, relembrando o teorema do trabalho-energia cinética, podemos escrever: ∆K = W 83 (3.2) 84 CAPÍTULO 3. OSCILAÇÕES e combinando Eqs. (3.1) e (3.2), segue que: ∆U = ∆K o que pode ser escrito na forma, U2 − U1 = K 2 − K 1 ou seja, K1 + U1 = K2 + U2 = E onde E é a energia mecânica do sistema que é fixa no tempo. O movimento de uma partı́cula pode ser completamente descrito a partir do conhecimento de como a energia potencial varia com a posição, ou seja, sabendo-se a função U = U (x). Por simplicidade, estamos considerando sistemas descritos por apenas uma coordenada. Dado que saibamos o valor da energia total, então a energia cinética pode ser determinada facilmente. Além disso, a partir da derivada da energia potencial, podemos determinar a força atuando sobre a partı́cula para todos os valores de x. Isso pode ser facilmente visto considerando a Eq. (3.1) e a definição de trabalho: ∆U = −W = −F ∆x ∴ F (x) = − lim ∆x→0 ∆U ∆x ou seja, F =− dU . dx (3.3) Na figura 3.1 é mostrado um gráfico de U (x) e o correspondente gráfico da força que atua sobre a partı́cula. Note que a energia mecânica da partı́cula tem um valor total igual a E que é constante para todos os valores de x. Assim, a energia E é representada por uma reta horizontal paralela ao eixo x. Este gráfico indica que a partı́cula que está com uma certa velocidade no intervalo x1 < x < x2 , desde que a energia mecânica é diferente da energia potencial neste intervalo. Assim, considere que a partı́cula esta se movendo para a direita partindo da origem. O gráfico nos mostra que a medida que a partı́cula se aproxima de x2 , sua energia cinética vai diminuindo até ser igual a zero quando x = x2 . Desde que a energia cinética não pode ser negativa, a partı́cula não pode alcançar posições além de x2 . Considerando a derivada da energia potencial neste ponto, notamos que a partı́cula está sofrendo a ação de uma força no sentido −x. Assim, em x2 a partı́cula passa a ganhar velocidade no sentido contrário de modo que sua energia cinética se torna um máximo na origem. Quando a posição da partı́cula assume valores negativos, 3.1. O MOVIMENTO HARMÔNICO SIMPLES (MHS) 85 Figura 3.1: Gráfico de U (x) e o correspondente gráfico para a força obtido a partir da Eq. (3.3). esta passa a desacelerar e tem novamente velocidade igual a zero quando x = x1 . O ponto de mı́nimo do potencial em O é chamado ponto de equilı́brio estável e a forma de U (x) é chamada de “poço de potencial”. Qualquer sistema com energia menor do que as extremidades do poço de potencial, U (x1 ) e U (x2 ), revela um movimento oscilatório entre os pontos de retorno x1 e x2 . No caso em que as oscilações em torno do ponto de equilı́brio estável sejam pequenas, digamos limitadas ao intervalo −A < x < A, a energia potencial pode ser aproximada por uma forma parabólica e a força correspondente pode ser descrita por uma forma linear do tipo: F (x) = −kx, (k > 0). (3.4) A força tende a puxar a partı́cula para o ponto de equilı́brio estável. Note que a Eq. (3.4) tem a forma da lei de Hooke para um sistema massa-mola. De maneira correspondente, o potencial U (x) pode ser escrito na forma: 1 U (x) = kx2 . 2 (3.5) As Eqs. (3.4) e (3.5) são completamente gerais. Qualquer sistema cujo movimento possa ser modelado através de equações como estas executa o chamado movimento harmônico simples. Qualquer sistema cujo desvio do ponto de equilı́brio estável seja pequeno o suficiente pode ser aproximado pelas equações 86 CAPÍTULO 3. OSCILAÇÕES acima. Dando prosseguimento ao nosso estudo de oscilações, vamos considerar agora o sistema massamola mostrado na Fig. 3.2. Figura 3.2: Um oscilador harmônico simples. Na há atrito com a superfı́cie. O bloco se move em movimentos harmônicos simples quando é puxado ou empurrado a partir da posição de repouso x = 0 e depois liberado. Vamos aplicar a 2a lei de Newton ao bloco, quando este é puxado da posição de equilı́brio. Neste caso, temos que: ma = F (x) = −kx Mas a aceleração a = dv d2 x = 2 , assim podemos escrever ainda, dt dt m d2 x = −kx dt2 ou ainda, d2 x + ω02 x = 0, dt2 onde definimos ω0 como sendo: √ ω0 = k . m (3.6) (3.7) A Eq. (3.6) permite determinar x(t), ou seja, a posição do bloco para todos os tempos. Resolvendo a Eq. (3.6), podemos determinar completamente o movimento do bloco preso à mola de constante k. A Eq. (3.6) é uma equação diferencial ordinária de segunda ordem para x(t). É de segunda ordem porque a derivada de ordem mais elevada que aparece é a 2a . A classificação de ordinária vem do fato de apenas o tempo t ser a variável neste caso. 3.1.1 Equações Diferenciais: breve digressão No estudo de rotações, também tivemos a necessidade de resolver uma equação diferencial. Com efeito, a equação de movimento para o caso de aceleração angular constante é resultado da solução de uma 3.1. O MOVIMENTO HARMÔNICO SIMPLES (MHS) 87 equação diferencial para a posição angular. Para perceber isso, notamos que, ( ) d dθ dω d2 θ = α= = 2 dt dt dt dt e como α foi considerada constante, podemos escrever: d2 θ − α = 0. dt2 (3.8) Naquele caso, conseguimos resolver o problema primeiro integrando a definição da aceleração angular com α = constante e o resultado foi substituı́do na equação para a velocidade angular ω = dθ/dt. Uma segunda integração permitiu então calcular a posição θ em função do tempo. No entanto, poderı́amos ter considerado a equação diferencial Eq. (3.8) desde o inı́cio. A questão então seria: qual a função que derivada duas vezes e subtraı́da de uma constante α resulta no valor zero? A função tentativa seria da forma: 1 θ(t) = A + Bt + αt2 2 que satisfaz a Eq. (3.8). Isso pode ser verificado substituindo-se esta equação diretamente em Eq. (3.8). Este resultado familiar sugere que a solução geral de uma equação diferencial depende de duas constantes arbitrárias, que em geral são fixadas por condições iniciais: θ(0) = θ0 dθ = ω(0) = ω0 . dt t=0 As condições iniciais que fixam as constantes A e B poderiam ser as condições iniciais acima ou quaisquer outras duas condições que permitam obter as constantes A e B. Por exemplo, poderı́amos ter fixado o valor de θ em dois instantes de tempo diferentes, i.e., poderı́amos ter fornecido θ(t1 ) e θ(t2 ). Caso geral A Eq. (3.6) é uma equação diferencial linear1 desde que contém apenas termos lineares em x e suas derivadas, i.e., não aparecem termos do tipo x2 , x3 , · · · , (dx/dt)2 , (dx/dt)3 , · · · , etc. A equação diferencial de segunda ordem mais geral é dada por, A dx d2 x +B + Cx = D 2 dt dt onde os coeficientes poderiam A, B, C e D não dependem de x mas poderiam depender de t. 1 Veja seção 3.2b do livro Curso de Fı́sica Básica, Vol.II, pg. 43. 88 CAPÍTULO 3. OSCILAÇÕES A equação diferencial que estamos interessados tem a constante D = 0. Equações deste tipo são chamadas equações diferenciais homogêneas e têm as seguintes propriedades: (a) Se x1 (t) e x2 (t) são soluções da equação diferencial, a soma das duas soluções x1 (t) + x2 (t)também é solução. (b) Se x(t) é uma solução então ax(t), com a = constante também é solução. Combinando estas duas propriedades podemos construir a chamada solução geral da equação diferencial: x(t) = ax1 (t) + bx2 (t) onde a e b são constantes arbitrárias e x1 e x2 não são múltiplas uma da outra. Do contrário, poderı́amos colocar uma das soluções em evidência e terminar apenas com uma solução através da propriedade (b), i.e., poderı́amos escrever (a+bc)x1 = dx1 que é a mesma solução e temos apenas uma constante arbitrária. A solução x(t) é formada por uma combinação linear de duas soluções x1 e x2 e qualquer equação de segunda ordem linear e homogênea terá soluções deste tipo. Observe que este tipo de construção matemática é muito similar ao caso de vetores no plano-xy, o espaço R2 . Qualquer vetor r pode ser escrito como uma combinação linear do tipo: r = aî + bĵ com a e b sendo constantes arbitrárias e os versores unitários î e ĵ desempenhando o mesmo papel que as soluções da equação diferencial. Este caráter análogo entre o espaço R2 e o espaço das soluções da equação diferencial de segunda ordem linear e homogênea é chamado de isomorfismo. Para aqueles que ficaram interessados e desejam maiores informações recomendo que façam um curso em Álgebra Linear2 . 3.1.2 Solução da Equação Diferencial para o oscilador harmônico Voltando à nossa equação diferencial, vemos então que precisamos de duas soluções independentes, ou seja, que não podem ser escritas como múltipla uma da outra. Em geral, existem alguns métodos para achar tais soluções mas no caso presente é bastante simples obter a solução. Basta perceber que a equação 2 Uma boa sugestão é o curso de Álgebra linear do MIT no link: http://ocw.mit.edu/courses/mathematics/ 18-06-linear-algebra-spring-2010/video-lectures/. Além disso, o curso de equações diferenciais do MIT também é interessante: http://www.youtube.com/watch?v= XDhJ8lVGbl8 3.1. O MOVIMENTO HARMÔNICO SIMPLES (MHS) 89 consiste de uma derivada de segunda ordem de x(t) somada à própria função multiplicada pela constante ω02 . Conhecemos duas funções que satisfazem este requisito: a função seno e a função cosseno. Assim, considere que x(t) é dado por: x(t) = cos ω0 t e substituindo na Eq. (3.6), segue que: d2 x(t) + ω02 x(t) = 0 dt2 d2 (cos ω0 t) + ω02 cos ω0 t = 0 dt2 ou seja, −ω02 cos ω0 t + ω02 cos ω0 t = 0 e a equação acima é satisfeita. Vamos considerar agora a função seno. Assim, fazemos: x(t) = sin ω0 t e substituindo na equação diferencial dada pela Eq. (3.6), segue que: d2 x(t) + ω02 x(t) = 0 dt2 d2 (sin ω0 t) + ω02 sin ω0 t = 0 dt2 ou ainda, −ω02 sin ω0 t + ω02 sin ω0 t = 0 e a equação acima é satisfeita. Vemos das equações acima que a equação diferencial é satisfeita com funções seno e cosseno. Desde que procuramos a solução geral, e que esta as funções seno e cosseno são linearmente independentes (não podemos escrevê-las como múltiplo uma da outra), podemos escrever a solução geral como: x(t) = a cos ω0 t + b sin ω0 t (3.9) A Eq. (3.9) foi obtida através da consideração de que cada uma das funções satisfaz a equação diferencial (3.6) separadamente. Desde que a equação diferencial é linear, então segue pelas propriedades (a) e (b) que a a combinação linear das duas soluções também é uma solução. 90 CAPÍTULO 3. OSCILAÇÕES Podemos reescrever a Eq. (3.9) na forma alternativa: x(t) = A cos(ω0 t + ϕ) (3.10) Vemos que as duas soluções Eq. (3.9) e Eq. (3.10) são equivalentes. Expandindo o cosseno da soma na Eq. (3.10): x(t) = A cos ω0 t cos ϕ − A sin ω0 t sin ϕ e comparando com a solução dada pela Eq. (3.9) vemos que as equações são iguais dado que: a = A cos ϕ b = −A sin ϕ Assim, dados A e ϕ, podemos determinar os valores de a e b. Da mesma forma, com a e b podemos calcular os valores correspondentes de A e ϕ: a cos ϕ = √ 2 a + b2 b sin ϕ = − √ 2 a + b2 onde, A= 3.1.3 √ a2 + b2 . Interpretação fı́sica da solução do oscilador harmônico Agora precisamos verificar qual é a fı́sica por trás da solução dada pela Eq. (3.10). Primeiramente, notamos que a posição do bloco varia entre −A e +A. Fica, portanto, claro que devemos identificar a constante A com o valor máximo que a posição do bloco pode atingir. Assim, escrevemos |A| = xm que é a amplitude da oscilação. Assim, reescrevemos Eq. (3.10) na forma, x(t) = xm cos(ω0 t + ϕ). (3.11) A função cosseno é uma função periódica de t, o que significa que a função cosseno se repete após um certo intervalo de tempo T , que chamamos de perı́odo da função. Podemos determinar o perı́odo pela condição: x(t + T ) = x(t) 3.1. O MOVIMENTO HARMÔNICO SIMPLES (MHS) 91 ou seja, xm cos[ω0 (t + T ) + ϕ] = xm cos(ω0 t + ϕ) e os dois membros são iguais se os argumentos dos cossenos são iguais a menos de um fator 2π, i.e., ω0 (t + T ) + ϕ = ω0 t + ϕ + 2π ou seja, ω0 T = 2π T = 2π 1 = . ω0 f (3.12) onde f é a freqüência de oscilação, medida em segundo−1 ou hertz (Hz). A grandeza ω0 = 2πf chama-se freqüência angular e se mede em rad/s ou simplesmente s−1 . Sendo uma função periódica, O argumento do cosseno na Eq. (3.11), θ0 = ω0 t + ϕ (3.13) chama-se fase do movimento, e ϕ é a constante de fase ou fase inicial (fase para t = 0). Na figura 3.3 temos alguns gráficos da função x(t) em diferentes situações com o objetivo de ilustrar melhor a função de cada parâmetro da Eq. (3.10). Nos três exemplos da Fig. 3.3, a curva azul foi obtida fazendo a constante de fase ϕ = 0. Na Fig. 3.3a, a diferença entre a curva vermelha e a curva azul é está na amplitude. A curva vermelha tem uma amplitude x′m maior em comparação com a curva azul xm assim, os deslocamentos do bloco da curva vermelha são maiores. Na curvas da Fig. 3.3b, os perı́odos das duas curvas são diferentes. De fato, o perı́odo T ′ da curva vermelha é a metade do perı́odo T da curva azul. Assim, vemos que a curva vermelha parece estar comprimida ao longo do eixo dos tempos. Na Fig. 3.3c, vemos duas curvas com diferentes constantes de fase. Neste caso, a curva vermelha tem ϕ = −π/4. Como resultado, a curva vermelha está deslocada para a direita. Fisicamente, isto equivale à posição inicial do bloco ser diferente da posição xm de onde é solto no caso da curva azul. Condições Iniciais A Eq. (3.10) é a solução geral do oscilador harmônico, o que significa que existem duas constantes a serem determinadas xm e ϕ. Apesar de conhecermos o significado fı́sico destas constantes, precisamos determinar as condições que a solução geral deve satisfazer para obter valores numéricos para estas CAPÍTULO 3. OSCILAÇÕES deslocamento deslocamento deslocamento 92 Figura 3.3: Alguns gráficos da posição x(t) em função do tempo. constantes. Conforme foi ilustrado na equação diferencial para o movimento angular com aceleração constante, existem duas condições que a equação diferencial deve satisfazer. Aqui as condições iniciais são dadas por: x(t = 0) = x0 dx(t) = v(t = 0) = v0 dt t=0 (3.14a) (3.14b) ou seja, precisamos saber de antemão o valor da posição no instante inicial t = 0 e da derivada da posição neste instante que é a velocidade do bloco no instante t = 0. Vamos escrever as constantes de fase e a amplitude do oscilador em temos de x0 e v0 . Para isso, primeiramente precisamos da equação para a velocidade, assim, temos: v(t) = d dx(t) = [xm cos(ω0 t + ϕ)] dt dt ou seja, v(t) = −xm ω0 sin(ω0 t + ϕ) (3.15) onde notamos que o fator ω0 xm é a amplitude da velocidade do bloco do sistema massa-mola. Resta então, aplicar as condições iniciais sobre as Eqs. (3.10) e (3.15): x(0) = x0 = xm cos(0 + ϕ) = xm cos ϕ 3.1. O MOVIMENTO HARMÔNICO SIMPLES (MHS) 93 e v(0) = v0 = −xm ω0 sin(0 + ϕ)] = −xm ω0 sin ϕ Temos um sistema com duas equações e duas incógnitas, assim, escrevemos: x20 + v02 = x2m ω02 ou seja, √ xm = x20 + v02 ω02 e dividindo as duas relações, podemos obter a o ângulo ϕ: ( ) v0 ϕ = arctan . x0 ω0 Retomando a Eq. (3.15), podemos reescrever a velocidade da seguinte forma, ( π) v(t) = xm ω0 cos ω0 t + ϕ + 2 (3.16) existe uma defasagem de π/2 entre a velocidade e a posição da partı́cula. Nas Figs. 3.4a e 3.4b são mostradas as curvas de x(t) e v(t) com ϕ = 0, respectivamente. Notamos que a velocidade tem um valor máximo (ω0 xm ) quando x = 0 e é nula quando x = |xm |. Resta agora determinar a curva para a aceleração a(t) que é obtida derivando-se a velocidade dada pela Eq. (3.15): a(t) = −xm ω02 cos(ω0 t + ϕ) ou seja, a(t) = −ω02 x(t). A curva da aceleração é ilustrada na Fig. 3.4c. Notamos que a força sempre aponta no sentido contrário à posição da partı́cula desde que no movimento harmônico, a força tentar restaurar a posição de equilı́brio. 3.1.4 Energia do Oscilador Harmônico A energia cinética do oscilador harmônico pode ser calculada diretamente pela Eq. (3.15): 1 K = mv 2 2 CAPÍTULO 3. OSCILAÇÕES aceleração velocidade deslocamento 94 Figura 3.4: Comparação entre a curvas da (a) posição x(t), (b) velocidade v(t) e (c) aceleração em função do tempo. Todas as curvas foram determinadas considerando ϕ = 0. ou ainda, 1 K = m [−xm ω0 sin(ω0 t + ϕ)]2 2 1 K = mx2m ω02 sin2 (ω0 t + ϕ). 2 (3.17) Podemos determinar a energia potencial através da Eq. (3.5): 1 U (x) = kx2 2 e substituindo a Eq. (3.11), segue que: 1 U (x) = k [xm cos(ω0 t + ϕ)]2 2 ou seja 1 U (x) = mω02 x2m cos2 (ω0 t + ϕ). 2 (3.18) 3.1. O MOVIMENTO HARMÔNICO SIMPLES (MHS) 95 onde usamos a definição ω02 = k/m. Somando as Eqs. (3.17) e (3.18), obtemos: 1 1 K + U = mx2m ω02 sin2 (ω0 t + ϕ) + mω02 x2m cos2 (ω0 t + ϕ) 2 2 ou seja, 1 K + U = mx2m ω02 [sin2 (ω0 t + ϕ) + cos2 (ω0 t + ϕ)] 2 ou seja, 1 1 K + U = mx2m ω02 = kx2m 2 2 e desde que a soma da energia cinética e a energia potencial é a energia mecânica total do sistema massa-mola, podemos escrever: 1 Em = kx2m 2 (3.19) A energia mecânica do oscilador é constante e independente do tempo. A energia potencial e cinética são mostradas na Fig. 3.5a em função do tempo e na Fig.3.5b em função da posição, x. Vemos então que parte da energia mecânica é armazenada no elemento elástico (energia potencial) e parte é armazenada de inércia (energia cinética). Quando o bloco atinge a amplitude máxima xm toda a energia mecânica está armazenada na mola na forma de energia potencial. Isso ocorre para t = T . Quando a mola está na posição x = 0, o que ocorre para t = T /4, toda a energia está armazenada na forma cinética. Na Eq. (3.18), vemos que a energia potencial varia com o quadrado da posição da partı́cula, como deveria desde que estamos considerando que a energia potencial tem uma forma parabólica. Usando a identidade sin2 θ + cos2 θ = 1, podemos escrever a energia cinética em função da posição. Retomando a Eq. (3.17) segue que: 1 1 1 1 K = mx2m ω02 sin2 (ω0 t + ϕ) = mx2m ω02 [1 − cos2 (ω0 t + ϕ)] = mx2m ω02 − mx2 ω02 2 2 2 2 ou seja, 1 K = mω02 (x2m − x2 ) 2 (3.20) O gráfico da Eq. (3.20) é mostrado na Fig.3.5b. Vemos que é inverso do gráfico da energia potencial e portanto tem o máximo no ponto x = 0 e mı́nimos nos pontos x = ±xm . CAPÍTULO 3. OSCILAÇÕES Energia Energia 96 Figura 3.5: Comparação entre a curvas da (a) posição x(t), (b) velocidade v(t) e (c) aceleração em função do tempo. Todas as curvas foram determinadas considerando ϕ = 0. 3.2 Aplicações do movimento harmônico simples Aqui vamos considerar alguns exemplos de sistemas que exibem movimento harmônico simples. Até aqui escolhemos o sistema massa-mola para desenvolver todas as equações do movimento harmônico simples. No entanto, independentemente do tipo de sistema e do deslocamento, ficará claro que a equação diferencial que modela o movimento do oscilador é idêntica para todos os casos. 3.2.1 O pêndulo de torção Considere o disco pendurado por fio a uma extremidade fixa, conforme mostrado na Fig. 3.6. Quando fazemos o disco girar por um ângulo θ a partir da posição de equilı́brio, o fio aplica um torque restaurado dado por: τ = −κθ 3.2. APLICAÇÕES DO MOVIMENTO HARMÔNICO SIMPLES onde κ é a constante de torção do fio. Assim, desde que o torque é dado por τ = 97 dL , onde L é momento dt Extremidade fixa Fio de suspensão Linha de referência Figura 3.6: O pêndulo de torção ilustrado acima é a versão angular de um oscilador harmônico simples linear. O disco oscila no plano horizontal; a reta de referência oscila com amplitude θm . A torção no fio de suspensão armazena a energia potencial de forma semelhante a uma mola e produz o torque restaurador. angular do disco, podemos escrever: dL = −κθ dt e como L = Iω para um corpo rı́gido como o disco, segue que: d(Iω) dω =I dt dt ou, como ω = dθ/dt, segue que: d2 θ d(Iω) =I 2 dt dt e substituindo na equação para o torque, podemos escrever: I d2 θ + κθ = 0 dt2 ou seja, d2 θ κ + θ = 0. dt2 I 98 CAPÍTULO 3. OSCILAÇÕES que tem a mesma forma da equação diferencial para o sistema massa-mola, onde θ faz o mesmo papel da posição x do bloco. Assim, de maneira análoga, podemos identificar a freqüência do sistema massa-mola na forma, √ ω0 = κ I e como ω0 = 2π/T onde T é o perı́odo de oscilação, podemos escrever o perı́odo para o pêndulo de torção na seguinte forma: √ T = 2π 3.2.2 I . κ Pêndulos Até aqui consideramos sistemas em que a força restauradora era oriunda de um elemento elástico, i.e., uma mola, ou o fio no caso do pêndulo de torção. Consideramos que esta força era proporcional ao deslocamento cuja constante de proporcionalidade dependia das caracterı́sticas do elemento elástico. Vamos agora considerar o caso em que penduramos uma massa por um fio ou cabo pivotado em um determinado ponto. Assim, quando deslocamos a massa do ponto de equilı́brio a força da gravidade que atua sobre a massa é a força restauradora. O pêndulo simples O exemplo mais elementar de pêndulo é o chamado pêndulo simples que consiste em uma massa m pendurada em uma das extremidades de um fio de comprimento L enquanto a outra extremidade está localizada em ponto fixo, conforme mostrado na Fig. 3.7a. Para determinar o movimento da massa m em torno do ponto fixo, decompomos as forças que atuam sobre ela conforme mostrado na Fig. 3.7b. Temos a força da gravidade F⃗g atuando na direção vertical e a tração no fio T⃗ atuando ao longo do fio. A tração no fio é anulada pela componente Fg cos θ da força da gravidade enquanto a componente perpendicular ao fio produz um torque igual a −Fg L sin θ, onde o sinal de menos aparece devido ao torque produzir um movimento no sentido horário, que por convenção é negativo. Assim, escrevemos: τ = −Fg L sin θ E como sabemos, o torque é igual a Iα, podemos escrever: α=− Fg L sin θ I 3.2. APLICAÇÕES DO MOVIMENTO HARMÔNICO SIMPLES 99 Ponto fixo Figura 3.7: (a) Um pêndulo simples. (b) As forças que agem sobre o peso são a força gravitacional F⃗g e a tração no fio T⃗ . A componente tangencial da força gravitacional Fg sin θ é a força restauradora que tende a levar o pêndulo de volta para a posição central. e como α = d2 θ/dt2 , temos: Fg L d2 θ sin θ =− 2 dt I e como o módulo da força gravitacional é dada por mg, segue que: d2 θ mgL sin θ. =− 2 dt I A equação acima permite determinar a posição da massa com o tempo, no entanto, é difı́cil de ser resolvida devido ao seno que aparece no segundo membro. Aqui faremos uma restrição sobre o movimento do pêndulo: consideramos que o deslocamento angular em torno da posição de equilı́brio (θ = 0) é muito pequeno. Neste caso, podemos aproximar sen θ ≈ θ e, com isso, podemos escrever: d2 θ mgL + θ=0 dt2 I e novamente temos uma equação diferencial para um movimento harmônico simples. Reconhecendo que o coeficiente de θ é igual ao quadrado da freqüência angular, podemos escrever: √ mgL ω0 = I e, portanto, o perı́odo do pêndulo é dado por: T = 2π √ I . mgL 100 CAPÍTULO 3. OSCILAÇÕES Como estamos considerando um pêndulo simples, então a massa está toda localizada no corpo que está preso ao fio, que por sua vez, tem massa desprezı́vel. Assim, o momento de inércia é simplesmente igual a I = mL2 , logo, o perı́odo pode ser escrito como: √ T = 2π L . g O pêndulo fı́sico Em geral, quando penduramos qualquer objeto, independente de sua forma, em torno de um ponto fixo e o tiramos do equilı́brio este passa a oscilar. Assim, no caso de pequenas amplitudes de oscilação, i.e., quando sin θ ≈ θ, podemos obter um movimento harmônico simples novamente. Para obter a equação diferencial para este pêndulo, considere a Fig. 3.8. Vemos que a força gravitacional atura sobre o centro de massa produzindo um torque em relação ao ponto O, onde o pêndulo está fixo. A distância entre o centro de massa e a origem O é h, logo de acordo com a 2a lei de Newton angular, podemos escrever, τ = Iα = −Fg h sin θ e considerando que a massa do corpo é m, podemos escrever ainda: Figura 3.8: Um pêndulo simples fı́sico. O torque restaurador é Fg h sin θ. Quando θ = 0, o centro de massa C está situado diretamente abaixo do ponto de suspensão O. Iα = −mgh sin θ 3.2. APLICAÇÕES DO MOVIMENTO HARMÔNICO SIMPLES 101 e usando a aproximação para o movimento harmônico simples podemos escrever: Iα ≈ −mghθ e obtemos a mesma equação obtida no caso do pêndulo simples: d2 θ mgh + θ=0 dt2 I e da mesma forma, que nos casos anteriores, podemos determinar o perı́odo de oscilação: √ I . T = 2π mgh E vemos, portanto, que o pêndulo simples é uma particularização para o caso em que o pêndulo fı́sico se reduz a uma massa localizada na extremidade do fio. No entanto, o momento de inércia é uma expressão indeterminada desde que estamos considerando um corpo de forma arbitrária. Medindo a aceleração da gravidade Podemos usar o pêndulo fı́sico para determinar a aceleração da gravidade através da medida do perı́odo T de oscilação. Para isso, considere que o pêndulo fı́sico é uma barra uniforme de comprimento L. Neste caso o centro de massa da barra está localizada no seu centro, i.e., o centro de massa fica na distância L/2. Considere que a barra está pivotada em uma de suas extremidades, assim a distância h entre este ponto e o centro de massa é igual a L/2. Para determinar o perı́odo T de oscilação iremos precisar do momento de inércia I em torno do eixo de rotação. Para isso, podemos usar o teorema do eixo paralelo, que permite relacionar o momento de inércia procurado com o momento de inércia em torno do centro de massa da barra que conhecemos ser igual a Icm = mL2 /12. Assim, temos que: I = Icm + mh2 e substituindo-se os valores correspondentes, podemos escrever ( )2 mL2 L I= +m 12 2 o que após uma rápida álgebra fica na forma: I= mL2 3 Substituindo este resultado na expressão para o perı́odo, podemos escrever: √ mL2 T = 2π . 3mg(L/2) 102 CAPÍTULO 3. OSCILAÇÕES ou seja, √ T = 2π 2L . 3g e elevando a expressão ao quadrado, temos ainda: T 2 = 4π 2 2L 3g (3.21) logo, g= 8π 2 L 3T 2 que permite determinar a aceleração g através da medida de T e L. Alternativamente podemos usar a Eq. (3.21) para construir um gráfico de T 2 × 2L/3 para diferentes valores do comprimento da barra. Com isso, o coeficiente angular da reta corresponderia ao inverso da aceleração da gravidade. Outra maneira seria usar a mesma barra mas variando a distância h entre o centro de massa e o ponto de rotação. Com isso, poderı́amos obter um gráfico linear onde o coeficiente angular nos indicaria o valor da aceleração da gravidade. 3.2.3 Exemplos 1. Um bloco de massa M = 5, 4 kg, em repouso sobre uma mesa horizontal sem atrito, está ligado a um suporte rı́gido através de uma mola de constante elástica k = 6000 N/m. Uma bala de massa m = 9, 5 g e velocidade ⃗v de módulo 630 m/s atinge o bloco e fica alojada nele (veja Fig. 3.9). Supondo que a compressão da mola é desprezı́vel até a bala se alojar no bloco, determine (a) a velocidade do bloco imediatamente após a colisão e (b) a amplitude do movimento harmônico simples resultante. (a) Considerando que se trata de uma colisão inelástica, então considerando que o conjunto bloco+bala tem uma velocidade v ′ após a colisão, então podemos escrever: mv = (M + m)v ′ o que nos permite escrever v′ = m v. M +m 3.2. APLICAÇÕES DO MOVIMENTO HARMÔNICO SIMPLES 103 Figura 3.9: Veja exemplo 1. Note que a colisão da bala com o bloco, sendo inelástica, não conserva energia. No entanto, o momento linear é conservado o que nos permitiu determinar a velocidade do bloco. O valor numérico da velocidade v ′ pode ser obtido substituindo-se os parâmetros correspondentes: v′ = 9, 5 × 10−3 kg × 630 m/s. 5, 4 kg + 9, 5 × 10−3 kg o que resulta em: v ′ = 1, 1 m/s que é a resposta procurada. (b) Uma vez que temos o bloco+bala com velocidade v ′ podemos aplicar a conservação da energia desde que agora temos o movimento do bloco e a compressão da mola que exerce uma força igual a −kx(t), onde x(t) é e a posição do bloco no instante t. Como não temos atrito, podemos escrever: 1 1 (m + M )v ′2 = kx2m 2 2 desde que a velocidade inicial é a velocidade máxima do bloco, correspondente ao valor máximo da energia do sistema. Quando o bloco pára toda a energia mecânica é convertida em energia potencial da mola que é comprimida com a distância máxima dada por xm , assim, podemos escrever: √ m+M ′ xm = v k 104 CAPÍTULO 3. OSCILAÇÕES e substituindo-se os valores correspondentes, obtemos: √ 9, 5 × 10−3 kg + 5, 4 kg xm = 1, 1 m/s 6000 N/m ou seja, xm = 3, 3 cm. Figura 3.10: Veja exemplo 2. 2. Na Fig. 3.10 dois blocos (m = 1, 8 kg e M = 10 kg) e uma mola (k = 200 N/m) estão dispostos em uma superfı́cie horizontal sem atrito. O coeficiente de atrito estático entre os dois blocos é 0,40. Que amplitude do movimento harmônico simples do sistema blocos-mola faz com que o bloco menor fique na iminência de deslizar sobre o bloco maior? A força de atrito deve compensar a aceleração do sistema. O módulo da aceleração máxima ocorre quando os blocos atingem a amplitude máxima do deslocamento, assim, podemos escrever: a = ω02 xm = k xm m+M e de acordo com a segunda lei de Newton, temos também: ma = fs = µe N = µe mg assim, combinando este valor de aceleração com a aceleração devido à força exercida pela mola, podemos escrever, k xm = µe g m+M e isolando a amplitude máxima, segue que: ( xm = m+M k ) µe g. 3.2. APLICAÇÕES DO MOVIMENTO HARMÔNICO SIMPLES 105 Substituindo os valores dos parâmetros obtemos finalmente: ) ( 1, 8 kg + 10 kg xm = × 0, 40 × 9, 8 m/s2 200 N/m xm = 23 cm. 3. Na Fig. 3.11 uma barra de comprimento L = 1, 85 m oscila como um pêndulo fı́sico. (a) Que valor da distância x entre o centro de massa da barra e o ponto de suspensão O corresponde ao menor perı́odo? (b) Qual é esse perı́odo? Figura 3.11: Veja exemplo 3. (a) O perı́odo do pêndulo fı́sico é dado por: T = 2π √ Icm + M x2 M gx onde M é a massa da barra e x é a distância entre o centro de massa da barra e o ponto em torno do qual a barra se movimenta. Para determinar o valor da distância x que minimiza o perı́odo de oscilação, devemos calcular a derivada dT /dx e igualar a zero. Com isso, podemos encontrar o valor de x que minimiza o perı́odo de oscilação. Assim, temos que: √ √ d √ d √ 2) − I 2 M gx ( I + M x + M x ( M gx) cm cm dT dx dx = 2π dx M gx 106 CAPÍTULO 3. OSCILAÇÕES onde usamos a relação d/dx(u/v) = (u′ v − uv ′ )/v 2 . Agora, resolvendo as derivadas no numerador da fração, segue que: √ M gx dT = 2π dx ( Mx √ Icm + M x2 ) √ − Icm + M x2 ( M gx ) Mg √ 2 M gx onde usamos, Mx d √ [Icm + M x2 ]−1/2 ( Icm + M x2 ) = 2M x = √ dx 2 Icm + M x2 e, d √ 1 Mg ( M gx) = [M gx]−1/2 M g = √ . dx 2 2 M gx Podemos escrever a derivada da seguinte maneira: [ ] 2M 2 gx2 − (Icm + M x2 )M g dT √ = 2π dx 2(M gx)3/2 Icm + M x2 Seja x̃ o valor de x que faz o perı́odo ser um mı́nimo, assim, quando x = x̃, podemos escrever, dT = 0, dx x=x̃ assim temos: ] [ dT 2M 2 gx̃2 − (Icm + M x̃2 )M g √ =0 = 2π dx x=x̃ 2(M gx̃)3/2 Icm + M x̃2 o que nos permite escrever: 2M 2 gx̃2 − (Icm + M x̃2 )M g = 0 2M 2 gx̃2 − Icm M g − M 2 gx̃2 = 0 ou seja, √ M x̃ − Icm = 0 2 ∴ x̃ = Icm M No caso da barra, o momento de inércia em torno do centro de massa Icm = M L2 /12, assim, podemos obter o valor numérico para x̃: √ x̃ = M L2 L =√ . 12M 12 3.3. MOVIMENTO HARMÔNICO SIMPLES E MOVIMENTO CIRCULAR UNIFORME 107 Com L = 1, 85 m, obtemos √ x̃ = 1, 85 m/ 12 = 0, 53 m. (b) O perı́odo correspondente pode ser determinado diretamente 3.3 Movimento Harmônico Simples e Movimento Circular Uniforme O movimento harmônico simples tem uma relação muito próxima com o movimento circular uniforme, que deve ter sido estudado no curso anterior de mecânica. De fato, conforme mostrado na Fig. 3.12, podemos fazer isso considerando um ponto P ′ da trajetória circular descrita por uma partı́cula. Considerando que o raio do cı́rculo é igual a xm e o ângulo que o raio vetor que liga o ponto P ′ à origem é dado por ωt + ϕ, então a componente horizontal do movimento, descrita pelo movimento do ponto P , pode ser escrita como: x(t) = xm cos(ωt + ϕ) onde usamos o triângulo retângulo formado pelos pontos O, P e P ′ . Note que esta equação é exatamente a Eq. (3.11) obtida através para o sistema massa-mola (exceto que estamos usando ω em vez de ω0 ). O módulo da velocidade no movimento circular uniforme é dado por v = ωr, que se reduz a v = ωxm e usando o triângulo retângulo da Fig. 3.12b, podemos escrever: v(t) = −ωxm sin(ωt + ϕ) que também também apresenta a mesma forma que a velocidade para o movimento harmônico simples. A aceleração radial no movimento circular uniforme tem módulo igual a ar = ω 2 r, e desde que estamos chamando o raio da trajetória de xm , temos que o módulo da aceleração a = ω 2 xm , assim, usando a Fig. 3.12c, podemos escrever a componente horizontal da aceleração na forma: v(t) = −ω 2 xm cos(ωt + ϕ) onde o sinal de menos indica que a aceleração é contrária ao movimento da mesma forma que a velocidade. Com isso, fica demonstrado que a projeção do movimento circular uniforme é igual a um movimento harmônico simples. Com efeito, uma das demonstrações famosas deste fato é a órbita dos satélites de 108 CAPÍTULO 3. OSCILAÇÕES Figura 3.12: O movimento circular uniforme, quando projetado em uma das coordenadas, é igual ao movimento harmônico simples. Isso pode ser visto em (a) onde o movimento do ponto P ′ rebatido no eixo x corresponde ao movimento de P no eixo x. (b) velocidade do ponto P ′ também é rebatido no eixo x e corresponde à mesma forma que obtivemos no movimento harmônico simples. (c) aceleração correspondente cuja componente horizontal também se reduz à expressão obtida para o movimento harmônico simples. Júpiter que Galileu descobriu em 1610. Ele observou que os satélites estavam se delocando de um lado para outro em torno de Júpiter. De fato, eles circulam em torno de Júpiter mas Galileu apenas observou sua projeção que resulta em um MHS. 3.4 Oscilações Amortecidas e Forçadas Até o momento consideramos oscilações harmônicas do sistema sem considerar forças externas dissipativas. Assim, apenas as forças conservativas atuavam no sistema. Assim, a energia do sistema permanecia constante e podı́amos descrever o movimento oscilatório como uma troca da energia cinética em energia potencial. Agora vamos considerar uma situação mais realı́sticas onde um fator de amortecimento pode estar presente e uma força aplicada por um agente externo é aplicada. Os movimentos oscilatórios resultantes são chamados de oscilações amortecidas e oscilações forçadas quando aplicamos uma força externa para compensar as perdas devido à dissipação da energia. 3.4.1 Oscilações Amortecidas No caso das oscilações amortecidas, existe uma força de amortecimento que se opõe ao movimento do objeto. No caso de um pêndulo simples, o fator de amortecimento é a resistência do ar (e o atrito no 3.4. OSCILAÇÕES AMORTECIDAS E FORÇADAS 109 suporte). Em qualquer caso, consideramos que o fator de amortecimento seja uma força proporcional à velocidade do corpo. Isto é válido desde que a velocidade do corpo seja baixa. Assim, escrevemos, Fa = −bv = −b dx . dt (3.22) Assim, na aplicação da 2a lei de Newton, temos duas forças a serem consideradas: a força restauradora, obtida da derivada do potencial, e a força dada pela Eq. (3.22), assim, escrevemos: ma = ∑ F onde a soma é sobre todas as forças que atuam sobre um corpo de massa m. Assim, temos: ma = −kx − b dx dt e como a aceleração é a segunda derivada da posição, podemo escrever ainda, m dx d2 x = −kx − b 2 dt dt ou ainda, m d2 x dx + kx = 0 +b 2 dt dt e dividindo a equação pela massa m, podemos escrever: d2 x b dx k + + x = 0. 2 dt m dt m (3.23) Aqui é conveniente definir a constante de amortecimento na forma: γ= b m ω02 = k m (3.24) e já tı́nhamos definido a razão k/m: que é a freqüência de oscilação natural do sistema. Dizemos “natural” porque esta seria a freqüência com que o sistema iria oscilar se deixado livre de forças externas, conforme já discutimos anteriormente. Substituindo estas definições na Eq. (3.25), obtemos ainda: d2 x dx +γ + ω02 x = 0. dt2 dt (3.25) 110 CAPÍTULO 3. OSCILAÇÕES que é uma equação diferencial ordinária de 2a ordem linear com coeficientes constantes. Note que agora temos um termo adicional proporcional a primeira derivada de x(t). A solução da equação diferencial neste caso requer uma discussão mais prolongada, e não vamos fazêla aqui. Para detalhes sobre a solução recomendamos a leitura dos capı́tulos 3 e 4 do livro do Moysés. Da mesma forma que no caso anterior, a solução geral contém duas constantes indeterminadas que são a amplitude e a constante de fase. A solução da equação depende dos valores de γ/2 e ω0 . Temos três possibilidades: γ/2 < ω0 , γ/2 = ω0 e γ/2 > ω0 . Estes casos particulares são denominados amortecimento, subcrı́tico, crı́tico e supercrı́tico. Vamos considerar analisar cada caso separadamente. Amortecimento subcrı́tico (γ/2 < ω0 ) Para o caso de amortecimento subcrı́tico, a solução da equação diferencial Eq. (3.25) fornece: x(t) = xm e−(γ/2)t cos (ωt + ϕ) (3.26) onde, √ ω= ω02 − γ2 , 4 válido para γ/2 < ω0 . (3.27) Vemos que existem duas diferenças neste caso em comparação com o MHS que estudamos na seção anterior. O sistema oscila com uma freqüência diferente ω ̸= ω0 e a amplitude diminui com o tempo devido ao termo exponencial e−(γ/2)t . Assim, para intervalos de tempo muito longos o sistema pára de oscilar, pois e−(γ/2)t → 0 quando t → ∞. Note que este é o caso de amortecimento fraco de modo que a oscilação tem sua amplitude reduzida aos poucos à medida que o tempo passa. Para ilustrar melhor o efeito do amortecimento sobre o movimento do corpo oscilante na Fig. 3.13 temos o gráfico de x(t). Figura 3.13: Gráfico da Eq. (3.26) mostrando que a amplitude, dada por xm e−(γ/2)t , diminui exponencialmente com o tempo. 3.4. OSCILAÇÕES AMORTECIDAS E FORÇADAS 111 Considerações sobre energia Da mesma forma que amplitude vai sendo reduzida à medida que o tempo passa, a energia mecânica armazenada no oscilador vai sendo convertida em calor, som, etc., e portanto, sendo reduzida gradativamente. Podemos notar isso calculando a energia mecânica diretamente usando a Eq. (3.26) nas definições da energia potencial e energia cinética. Assim, temos para a energia potencial: 1 U (x) = kx2 2 1 U = kx2m e−γt cos2 (ωt + ϕ) 2 ou ainda, 1 U = mω 2 x2m e−γt cos2 (ωt + ϕ) 2 onde usamos k = mω 2 Para determinar a energia cinética, precisamos calcular a velocidade, assim, temos: v(t) = ] dx(t) d [ = xm e−(γ/2)t cos (ωt + ϕ) dt dt Aqui consideramos que durante um perı́odo de oscilação, o amortecimento é muito pequeno, de modo que o termo exponencial é aproximadamente constante. Esta aproximação é razoável desde que a condição γ/2 ≪ ω0 . Assim, podemos desprezar a dependência temporal da exponencial. Com isso, precisamos derivar apenas o cosseno: v(t) = −ωxm e−(γ/2)t sin (ωt + ϕ) . A energia cinética pode ser escrita na seguinte forma: 1 K = mv 2 2 logo, 1 K = mω 2 x2m e−γt sin2 (ωt + ϕ) 2 A energia mecânica é dada por: Em = K + U 112 CAPÍTULO 3. OSCILAÇÕES e substituindo as expressões que obtivemos para as energias cinética e potencial, segue que: 1 1 Em = mω 2 x2m e−γt sin2 (ωt + ϕ) + mω 2 x2m e−γt cos2 (ωt + ϕ) 2 2 [ ] 1 = mω 2 x2m e−γt sin2 (ωt + ϕ) + cos2 (ωt + ϕ) 2 ou seja, 1 Em = mω 2 x2m e−γt . 2 e vemos que a energia mecânica decai exponencialmente tão logo o amortecimento seja fraco. Figura 3.14: Sistema com amortecimento supercrı́tico. Note que o sistema não apresenta oscilação pois o amortecimento prevalece neste caso. Amortecimento Supercrı́tico (γ/2 > ω0 ) Neste caso o amortecimento é intenso de maneira que a solução para a Eq. (3.26) é dada por: x(t) = e−γt/2 (aeβt + be−βt ) onde, √ β= γ2 − ω02 4 (3.28) (3.29) que é sempre menor do que γ/2, de modo que, x(t) = (ae−(γ/2−β)t + be−(β+γ/2)t ) é a soma de duas exponenciais decrescentes. O fator β acaba reduzindo o decaimento pois aparece subtraindo o fator γ. Assim, notamos que o sistema não oscila neste caso, apenas relaxa para o estado de equilı́brio, conforme mostrado na Fig. 3.14. 3.4. OSCILAÇÕES AMORTECIDAS E FORÇADAS 113 Amortecimento Crı́tico (γ/2 = ω0 ) Neste caso, temos que a freqüência ω0 é igual ao fator de amortecimento. Assim, temos uma situação intermediárias entre as duas anteriores. A solução da equação diferencial para este caso é dada por: x(t) = (A + Bt)e−γt/2 (3.30) que decai mais rapidamente para tempos grandes que a Eq. (3.28), onde o termo eβt , como vimos reduz o decaimento. Na Fig. 3.15 temos uma comparação entre as soluções para os três tipos de amortecimento, onde vemos claramente que o amortecimento crı́tico é o caso que se aproxima mais rapidamente do equilı́brio. Figura 3.15: Comparação dos três tipos de amortecimento. Notamos que o amortecimento crı́tico se aproxima mais rapidamente do equilı́brio. 3.4.2 Oscilações Forçadas e Ressonância Até o momento consideramos um sistema oscilante na ausência de forças externas. No movimento harmônico simples observamos que o sistema oscila com uma freqüência bem definida e quando adicionamos efeitos dissipativos, a amplitude das oscilações tende a zero para tempos longos. Agora considere que o sistema é submetido a uma força externa que também oscila com uma freqüência ω e com módulo dado por forma F = F0 cos ωt. Aplicando a 2a lei de Newton para este caso, é fácil mostrar que a equação diferencial para o sistema pode ser escrita na forma: dx d2 x +γ + ω02 x = F0 cos ωt dt2 dt (3.31) 114 CAPÍTULO 3. OSCILAÇÕES e vemos que agora temos duas freqüência no problema, a freqüência natural de oscilação (ω0 ) e a freqüência da força externa (ω). Novamente, não vamos considerar a solução da equação diferencial, mas o leitor que tenha interesse pode consultar o livro do Moysés Vol.II para uma discussão completa do procedimento de solução. Aqui vamos nos ater à discussão da solução da Eq. (3.31) que é dada por: x(t) = xm (ω) cos[ωt + ϕ(ω)] (3.32) onde, xm (ω) = √ F0 /m (ω02 − ω 2 )2 + γ 2 ω 2 (3.33) e, ( ϕ(ω) = − arctan γω ω02 − ω 2 ) . (3.34) A primeira diferença com os casos anteriores é a dependência da amplitude e da constante de fase com a freqüência da força externa. Vemos, portanto, que a amplitude resultante depende não apenas da intensidade com que puxamos ou empurramos o bloco do sistema massa-mola ou com que tiramos do equilı́brio o pêndulo. A freqüência com que fazemos isso desempenha um papel importante. Para obter uma idéia mais clara sobre o significado da solução representada pela Eq. (3.32), vamos considerar o caso particular em que o amortecimento é fraco (γ ≪ ω0 ). Neste caso o sistema vai oscilar com a amplitude dependendo da força externa e da constante de amortecimento. 3.4.3 Ressonância Na situação em que a freqüência da força externa é muito próxima do valor da freqüência natural do sistema, i.e., ω ≈ ω0 . Assim, a seguinte desigualdade é válida: |ω0 − ω| ≪ ω0 o que nos permite escrever a Eq. (3.33) na seguinte forma: xm (ω) = √ F0 /m 4ω02 (ω0 − ω)2 + γ 2 ω02 onde fizemos as seguintes aproximações: (ω02 − ω 2 ) = (ω0 − ω)(ω0 + ω) = (ω0 − ω)(2ω0 + ω − ω0 ) ≈ 2ω0 (ω0 − ω) 3.4. OSCILAÇÕES AMORTECIDAS E FORÇADAS 115 e, γω = γ(ω0 + ω − ω0 ) ≈ γω0 . Da mesma forma, podemos aproximar a constante de fase da seguinte forma, ) ( ) ( γ γω0 = − arctan ϕ(ω) ≈ − arctan 2ω0 (ω0 − ω) 2(ω0 − ω) Podemos escrever o quadrado da amplitude da seguinte forma, x2m (ω) = F02 /4ω02 m2 . γ2 2 (ω0 − ω) + 4 Na Fig. 3.16 mostramos dois gráficos da equação acima para dois valores diferentes da constante de amortecimento γ. Nota-se que o quadrado da amplitude tem um máximo quando ω ≈ ω0 para as duas curvas. Sempre quando a freqüência da força externa é igual a freqüência natural do sistema a amplitude das oscilações é máxima e dizemos que atingimos a condição de ressonância. amortecimento fraco amortecimento forte Figura 3.16: São apresentadas duas curvas da amplitude xm em termos da freqüência da força externa para dois valores diferentes da constante de amortecimento γ1 e γ2 com γ1 < γ2 . Também é indicada a largura da curva a meia altura ∆ω onde notamos que esta aumenta com o amortecimento. Notamos que o valor máximo da amplitude é fortemente reduzido com o aumento de γ. É importante notar que a condição de ressonância é satisfeita independentemente do amortecimento, mas este afeta fortemente o valor máximo atingido pela amplitude. Na Fig. 3.16, γ1 < γ2 e vemos 116 CAPÍTULO 3. OSCILAÇÕES também que para γ = γ2 a largura a meia altura é maior à medida que o amortecimento aumenta. A condição de ressonância dever ser observada para qualquer estrutura mecânica que apresente algum tipo de vibração. De fato, quanto menor o amortecimento maiores serão as amplitudes atingidas o que pode levar a sérios problemas dependendo da estrutura em questão. Por exemplo, em um projeto de avião é recomendável que a freqüência de vibração das asas seja bem diferente da freqüência angular dos motores. Caso contrário, para certos valores da velocidade dos motores, as asas podem começar a vibrar fortemente comprometendo a estabilidade da aeronave. Em engenharia civil, problemas de ressonância são bastante comuns no projeto de prédios muito altos e pontes que podem oscilar com os fortes ventos a que ficam submetidos. 3.4.4 Exemplos 1. Um objeto de 10, 6 kg oscila na ponta de uma mola vertical que tem uma constante elástica k = 2, 05 × 104 N/m. O efeito da resistência do ar é representada pelo coeficiente de amortecimento b = 3, 00 N.s/m. (a) Calcule a freqüência da oscilação amortecida (suponha amortecimento subcrı́tico). Neste caso a freqüência natural do sistema é afetada de maneira significativa pelo amortecimento? (b) Por quantos por cento a amplitude da oscilação decresce em cada ciclo ? (c) Encontre o intervalo de tempo em que a energia do sistema é reduzida para 5% do seu valor inicial. A freqüência para o caso sem amortecimento é dada por: √ √ k 2, 05 × 104 N/m ∼ ω0 = = = 44 rad/s m 10, 6 kg (a) Temos que determinar a constante de amortecimento γ dada por: γ= b 3, 00 N.s/m = = 0, 283 s−1 m 10, 6 kg √ ω= ω02 − e substituindo-se os valores correspondentes, segue que: √ ω= (44 rad/s)2 − γ2 4 (0, 283 s−1 )2 4 3.4. OSCILAÇÕES AMORTECIDAS E FORÇADAS √ ω= (44 rad/s)2 − 117 (0, 283 s−1 )2 ∼ = 44 rad/s. 4 e vemos que o amortecimento praticamente não altera a freqüência de ressonância do sistema. (b) Temos que x(t) = xm e−γt/2 cos(ωt + ϕ) assim, para um perı́odo T = 2π/ω, a amplitude muda de xm para xm e−γπ/ω e para um decréscimo fracional dado por: xm − xm e−γπ/ω = 1 − e−γπ/ω = 0, 02 = 2% em cada ciclo. xm (c) A energia do sistema é dada por: 1 Em (t) = mω 2 x2m e−γt 2 e queremos o tempo t′ para Em (t′ ) = 0, 05Em (0), assim, temos: 1 ′ Em (t′ ) = mω 2 x2m e−γt 2 ou seja, 1 ′ 0, 05Em (0) = mω 2 x2m e−γt 2 1 e como Em (0) = mω 2 x2m , podemos escrever ainda, 2 1 1 ′ 0, 05 × mω 2 x2m = mω 2 x2m e−γt 2 2 e simplificando os termos em comum, obtemos: ′ e−γt = 0, 05 ou seja, t′ = − ln 0, 05 = 10, 6 s. γ 118 CAPÍTULO 3. OSCILAÇÕES 2. Um carro de 1000 kg com quatro ocupantes de 82 kg viaja em uma estrada de terra com “coste- las”separadas por um distância média de 4, 0 m. O carro trepida com amplitude máxima quando está a 16 km/h. Quando o carro pára e os ocupantes saltam qual é a variação da altura do carro? A cada passagem por uma das “costelas” as molas da suspensão do carro são comprimidas. Entre as “costelas”o carro sofre um deslocamento vertical pois as molas comprimidas começam a empurrar a massa M do carro somada à massa m dos ocupantes. Assim, temos um sistema massa mola em que a suspensão do carro desempenha o papel da mola e os ocupantes mais o carro desempenham o papel do bloco de massa m. Assim, a freqüência de oscilação do carro, pode ser determinada adaptando a fórmula para a freqüência de um sistema massa-mola, da seguinte forma: 2π ω= = T √ k M + 4m onde o fator 4 aparece por existir quatro ocupantes no carro . Desde que o carro oscila com amplitude máxima, então podemos determinar o perı́odo de oscilação que temos um perı́odo completo de oscilação entre as “costelas”, assim, desde que a velocidade do carro é constante podemos escrever diretamente: T = d v onde d = 4, 0 m é a separação entre as costelas. Substituindo na equação para freqüência angular, podemos determinar a constante k da suspensão: √ 2πv k = d M + 4m ou seja, ( k = (M + 4m) 2πv d )2 . Quando o carro pára e as pessoas ainda estão no carro, a posição de equilı́brio é dada pela lei de Hooke, portanto, xi = (M + 4m)g Fi = . k k Na situação em que as pessoas não estão mais no carro, temos a seguinte deformação: xf = Ff Mg = . k k 3.4. OSCILAÇÕES AMORTECIDAS E FORÇADAS 119 Assim, temos que a variação na altura do carro é dada por: xi − xf = (M + 4m)g M g 4mg − = k k k e substituindo o valor da constante k que calculamos anteriormente, podemos escrever ainda: xi − xf = 4mg ) ( 2πv 2 (M + 4m) d e substituindo os valores, segue que: xi − xf = 4 × 82 kg × 9, 8 m/s2 ( (1000 kg + 4 × 82 kg) 2π × 16 × 103 m/h × 1h 1 3600 s 4, 0 m )2 = 0, 05 m xi − xf = 5 cm 3. O sistema de suspensão de um automóvel de 2000 kg “cede” 10 cm quando o chassis é colocado no lugar. Além disso, a amplitude das oscilações diminui de 50% a cada ciclo. Estime os valores (a) da constante elástica (b) da constante de amortecimento b do sistema mola-amortecedor de uma das rodas, supondo que cada roda sustente 500 kg. (a) Da lei de Hooke, temos: k= F 500 kg × 9, 8 m/s2 = = 490 N/cm. x 10 cm (b) A constante de amortecimento pode ser obtida considerando a equação para o movimento amortecido x(t) = xm e−γt/2 cos(ωt + ϕ) e substituindo o tempo igual ao perı́odo de oscilação onde o deslocamento é reduzido à metade do deslocamento inicial: e fazendo x(T ) = x(t)/2, assim, temos: x(t + T ) = xm e−γ(t+T )/2 cos(ω(t + T ) + ϕ) = x(t) 2 120 CAPÍTULO 3. OSCILAÇÕES que resulta em: e−γT /2 = 1 2 ou seja, γ=− ω 1 ln 2π 4 onde usamos T = 2π/ω. E desde que o problema pede uma estimativa, podemos considerar que o √ amortecimento não provoca mudanças significativas sobre a freqüência e assim, aproximamos ω ∼ = k/m, logo 1 γ=− 2π √ k 1 ln m 4 e como γ = b/m, temos ainda, b 1 =− m 2π √ k 1 ln m 4 logo, b=− 1 √ 1 mk ln . 2π 4 Substituindo-se os valores correspondentes, vamos obter: b=− 3.5 1 √ 1 500 kg × 4900 N/cm ln = 1, 09 × 103 kg/s. 2π 4 Apêndice 1: Dedução das soluções amortecidas Objetivando detalhar os procedimentos matemáticos usados para a obtenção das soluções amortecidas vamos considerar neste apêndice a solução da equação diferencial para o oscilador harmônico amortecido: d2 x dx + 2β + ω02 x = 0 dt2 dt (3.35) onde estamos considerando uma notação ligeiramente diferente da usada no texto, onde definimos a constante de amortecimento 2β a qual é dada por: β= γ . 2 (3.36) Para resolver a equação homogênea, precisamos determinar a chamada solução geral da equação diferencial que é obtida através de uma combinação linear de duas soluções especı́ficas para o problema. 3.5. APÊNDICE 1: DEDUÇÃO DAS SOLUÇÕES AMORTECIDAS 121 Para achar estas soluções, observamos que a equação tem coeficientes constantes, assim, podemos tentar uma solução com dependência exponencial pois quando a derivados obtemos a mesma função multiplicada pelo coeficiente que aparece no expoente. Assim, vamos escrever: x(t) = eλt onde λ é um coeficiente a determinar substituindo esta expressão na Eq. (3.35) λ2 eλt + 2βλeλt + ω02 eλt = 0 ∴ (λ2 + 2βλ + ω02 )eλt = 0. (3.37) A Eq. (3.37) é satisfeita somente se o coeficiente da exponencial é zero, i.e., λ2 + 2βλ + ω02 = 0 que nos fornece duas soluções: λ1 = −β + λ2 = −β − √ √ β 2 − ω02 β 2 − ω02 e, assim, obtemos duas soluções: x1 (t) = eλ1 t x2 (t) = eλ2 t e a solução geral é dada por: x(t) = A1 x1 (t) + A2 x2 (t) = A1 eiλ1 t + A2 eiλ2 t e substituindo os valores correspondentes de λ1 e λ2 , segue que: √ 2 2 √ 2 2 x(t) = e−βt [A1 e β −ω0 t + A2 e− β −ω0 t ] (3.38) (3.39) A Eq. (3.39) contém três casos particulares dependendo da relação entre ω0 e β. Assim, denotamos estes casos da seguinte forma: (A) ω02 > β 2 , oscilações subamortecidas; (B) ω02 = β 2 , oscilações com amortecimento crı́tico; (C) ω02 < β 2 , oscilações superamortecidas. Vamos analisar a forma da Eq. (3.39) para cada caso separadamente. Neste caso, iremos verificar comportamentos completamente distintos do oscilador. 122 CAPÍTULO 3. OSCILAÇÕES Caso (A), ω02 > β 2 Neste caso temos que o radical se torna negativo, ou seja, temos raı́zes complexas, assim, escrevemos: √ √ β 2 − ω02 = i ω02 − β 2 = iω1 onde definimos √ ω1 = ω02 − β 2 e levando na Eq. (3.39) x(t) = e−βt [A1 eiω1 t + A2 e−iω1 t ] e usando a relação de Euler, e±iθ = cos θ ± i sin θ, podemos escrever ainda x(t) = e−βt [A3 cos(ω1 t) + A4 sin(ω1 t)] e usando novamente A3 = xm cos ϕ e A4 = −xm sin ϕ, podemos escrever a solução entre colchetes da seguinte forma: xA (t) = e−βt xm cos(ω1 t + ϕ) onde usamos um ı́ndice A para denotar que estamos nos referindo ao caso (A), subamortecido. Note que o movimento não é estritamente periódico pois o sistema nunca volta à mesma posição de onde iniciou o movimento. No caso em que o amortecimento é muito fraco, ou seja, ω0 ≫ β podemos aproximar o movimento para periódico onde a freqüência angular de oscilação se aproxima à freqüência angular do oscilador harmônico (ω0 ≈ ω1 ). Note que o parâmetro β tem dimensão de inverso do tempo, e portanto, pode ser interpretado como o inverso do tempo caracterı́stico de decaimento da amplitude do tipo de amortecimento. Com efeito, vamos considerar que τ é o perı́odo de uma oscilação e vamos comparar a razão da amplitude no tempo t e no tempo t + τ , para isso, considere a razão xA (t + τ )/xA (t): xA (t + τ ) e−β(t+τ ) xm cos(ω1 t + ω1 τ + ϕ) = xA (t) e−βt xm cos(ω1 t + ϕ) e usando a identidade cos(ω1 t+ ω1 τ +ϕ) = cos(ω1 t+ ϕ) cos(ω1 τ ) −sin(ω1 t+ ϕ) sin(ω1 τ ) e como ω1 = 2π/τ então cos(ω1 τ ) = 1 e sin(ω1 τ ) = 0, assim, segue que: e−β(t+τ ) xm cos(ω1 t + ϕ) xA (t + τ ) = = e−βτ xA (t) e−βt xm cos(ω1 t + ϕ) e a amplitude cai a 1/e para τ = β −1 . 3.5. APÊNDICE 1: DEDUÇÃO DAS SOLUÇÕES AMORTECIDAS 123 Caso (B), ω02 = β 2 Neste caso temos apenas uma solução pois, λ1 = λ2 e a Eq. (3.39) nos fornece x(t) = x1 (t) = Ae−βt (3.40) onde agrupamos as duas constantes A1 + A2 = A. Aqui surge uma dificuldade porque uma equação diferencial de segunda ordem requer duas soluções linearmente independentes. Estas duas soluções são linearmente independentes se não podemos obter a segunda a partir da multiplicação da primeira por uma constante. Assim, para encontrar a segunda solução, lançamos mão do chamado “método de variação dos parâmetros” cuja prescrição nos indica que a segunda solução pode ser obtida da primeira trocando-se a constante A que aparece na Eq. (3.40) por uma função a ser determinada, digamos y(t). Assim, escrevemos: x2 (t) = y(t)e−βt (3.41) e y(t) será determinado substituindo-se a Eq. (3.41) na equação diferencial dada pela Eq. (3.35). Assim, usamos as seguintes resultados: dx2 = dt ( ) dy − βy(t) e−βt dt e 2 d2 x2 dy dy −βt d y − β e−βt + β 2 y(t)e−βt = e − βe−βt 2 2 dt dt ( 2 dt )dt d y dy = + β 2 y(t) e−βt − 2β dt2 dt Substituindo-se x2 (t) na Eq. (3.35), temos: d2 x 2 dx2 + 2β + ω02 x2 = 0 2 dt dt e usando as derivadas acima, obtemos: [( ) ( ) ] d2 y dy dy 2 2 − 2β + β y(t) + 2β − βy(t) + ω y(t) e−βt = 0 0 dt2 dt dt e o termos entre colchetes deve ser nulo ( ) ( ) d2 y dy dy 2 − 2β + β y(t) + 2β − βy(t) + ω02 y(t) = 0 dt2 dt dt 124 CAPÍTULO 3. OSCILAÇÕES e lembrando que ω = β, temos ainda dy d2 y dy − 2β + β 2 y(t) + 2β − 2β 2 y(t) + β 2 y(t) = 0 2 dt dt dt que se reduz a d2 y = 0. dt2 A equação acima, tem como solução a função: y(t) = B1 + B2 t onde B1 e B2 são constantes. Com isso a segunda solução pode ser escrita como: x2 (t) = (B1 + B2 t)e−βt (3.42) A solução geral então pode ser escrita como a combinação linear de x1 e x2 : x(t) = C1 x1 + C2 x2 ou seja, x(t) = C1 Ae−βt + C2 (B1 + B2 t)e−βt = [C1 A + C2 (B1 + B2 t)]e−βt e agrupando as constantes, segue que: xB (t) = (A + Bt)e−βt (3.43) que representa um decaimento monotônico de x com o tempo. Neste caso, não há oscilações e o sistema simplesmente relaxa para a posição de equilı́brio. Caso (C), ω02 < β 2 Este caso é o mais simples pois os expoentes que aparecem na solução geral dada pela Eq. (3.39) são √ reais. Neste caso, definindo ω2 = β 2 − ω02 , segue que: xC (t) = A1 e−(β−ω2 )t + A2 e−(β+ω2 )t . (3.44) Desde que β > ω2 , então ambas as exponenciais são decrescentes e o sistema também é amortecido e relaxa para o estado de equilı́brio sem qualquer oscilar. 3.6. APÊNDICE 2: SOLUÇÕES AMORTECIDAS-FORÇADAS 3.6 125 Apêndice 2: Soluções Amortecidas-forçadas Neste caso, foi considerada a existência de uma terceira força, agora externa, que atua sobre o oscilador amortecido. Esta força externa apresenta uma dependência oscilatória com o tempo e é modelada da seguinte forma: F = F0 cos ωt onde ω é a freqüência angular de oscilação. Assim, considerando a presença das demais forças, a equação diferencial toma a forma: d2 x dx F0 + 2β + ω02 x = cos ωt dt2 dt m (3.45) e deixamos como um exercı́cio a demonstração da Eq. (3.45). De acordo com a teoria das equações diferenciais, equações não-homogêneas como a Eq. (3.45) requerem uma solução particular que dê conta do termo não-homogêneo somada à solução geral da equação homogênea de onda aparecem as duas constantes arbitrárias. Sendo assim, podemos escrever: x(t) = xh (t) + xp (t) onde xh (t) é a solução da equação homogênea (ou seja, com o segundo membro da Eq. (3.45) igual a zero) e xp é a solução particular da equação com o segundo membro diferente de zero. A solução da equação homogênea já foi determinada pois trata-se da equação diferencial para o oscilador amortecido. Vamos então considerar a solução particular que ainda não calculamos, para substituı́mos a solução x(t) na Eq. (3.45) e, após alguma álgebra, podemos escrever: d2 xp dxp d2 xh dxh F0 2 + 2β + ω x + + 2β + ω02 xp = cos ωt h 0 2 2 dt dt dt dt m (3.46) e desde que xh é solução da equação homogênea, então o termo em vermelho é zero, i.e., d2 xh dxh + 2β + ω02 xh = 0 2 dt dt o que nos permite escrever a Eq. (3.46) na forma: dxp d2 x p F0 + 2β + ω02 xp = cos ωt. 2 dt dt m (3.47) A Eq. (3.49) pode ser resolvida considerando que xp deve ter a forma de senos e cossenos, assim, podemos escrever: xp (t) = C1 cos ωt + C2 sin ωt 126 CAPÍTULO 3. OSCILAÇÕES onde C1 e C2 são constantes, como antes. De maneira equivalente, podemos escrever3 : xp (t) = A cos(ωt − δ) (3.48) onde definimos C1 = A cos δ e C2 = A sin δ. Assim, em vez de determinar C1 e C2 podemos, de modo completamente equivalente, determinar A e δ. Assim, substituindo Eq. (3.48) na Eq. (3.49), obtemos: dxp d2 x p F0 + 2β + ω02 xp = cos ωt. dt2 dt m (3.49) ou ainda, −Aω 2 cos(ωt − δ) − 2βAω sin(ωt − δ) + ω02 A cos(ωt − δ) = F0 cos ωt m ou ainda A(ω02 − ω 2 ) cos(ωt − δ) − 2βAω sin(ωt − δ) = F0 cos ωt m e expandindo os senos e cossenos podemos escrever ainda A(ω02 − ω 2 )[cos(ωt) cos δ + sin(ωt) sin δ] − 2βAω[sin(ωt) cos δ − cos(ωt) sin δ] = F0 cos ωt m e agrupando os termos correspondentes, podemos escrever ainda: [A(ω02 − ω 2 ) cos δ + 2βAω sin δ] cos ωt + [A(ω02 − ω 2 ) sin δ − 2βAω cos δ] sin ωt = F0 cos ωt m e igualando os coeficientes dos senos e cossenos, obtemos o seguinte sistema de equações: A(ω 2 − ω 2 ) cos δ + 2βAω sin δ = F0 , 0 m A(ω 2 − ω 2 ) sin δ − 2βAω cos δ = 0. 0 Da segunda equação podemos obter δ A(ω02 − ω 2 ) sin δ = 2βAω cos δ o que nos permite escrever tan δ = 3 2βω . − ω2 ω02 (3.50) Aqui estamos usando uma conveção diferente da apresentada no texto. Para fazer a identificação faça γ = 2β e δ = −ϕ(ω). 3.6. APÊNDICE 2: SOLUÇÕES AMORTECIDAS-FORÇADAS 127 Substituindo Eq. (3.50) na primeira equação do sistema, segue que: A(ω02 − ω 2 ) cos δ + 2βAω sin δ = F0 m o que nos permite escrever ( ) ( ) 1 F0 1 1 F0 = A= 2 2 2 2 m (ω0 − ω ) cos δ + 2βω sin δ m (ω0 − ω ) + 2βω tan δ cos δ e considerando o triângulo retângulo formando a partir da Eq. (3.50), então temos que cos δ = √ o que nos permite escrever F0 A= m ( 1 2 2 (ω0 − ω ) cos δ + 2βω sin δ ) ω02 − ω 2 (ω02 − ω 2 )2 + 4β 2 ω 2 F0 = m ( ) 2βω (ω02 − ω 2 ) + 2βω ω02 − ω 2 1 √ (ω02 − ω 2 )2 + 4β 2 ω 2 ω02 − ω 2 e efetuando as simplificações, segue que: A= √ F0 /m (ω02 (3.51) − ω 2 )2 + 4β 2 ω 2 A solução particular fica então na forma: xp = √ F0 /m (ω02 − ω 2 )2 + 4β 2 ω 2 onde δ é determinado pela Eq. (3.50), i.e., ( δ = arctan cos(ωt − δ), 2βω 2 ω0 − ω 2 (3.52) ) . Temos então que a solução completa para o problema do oscilador amortecido-forçado é dado por: x(t) = e−βt ζ(t) + √ F0 /m (ω02 − ω 2 )2 + 4β 2 ω 2 cos(ωt − δ) (3.53) onde definimos a função genérica ζ(t) que pode assumir diferentes formas dependendo da relação entre β e ω0 , conforme já discutimos: x cos(ω1 t + ϕ), sub-amortecimento m ζ(t) = A1 eω2 t + Be−ω2 t , super-amortecido A + Bt, amortecimento crı́tico E como a solução homogênea decai exponencialmente, então para t ≫ β −1 , então esta contribuição pode ser desprezada e temos a chamada solução estacionária: x(t ≫ β −1 ) = √ F0 /m (ω02 − ω 2 )2 + 4β 2 ω 2 cos(ωt − δ) (3.54) 128 CAPÍTULO 3. OSCILAÇÕES Capı́tulo 4 Fluidos Fluidos são substâncias que podem escoar, e portanto, assumem a forma do recipiente em que são colocados. Em geral, os fluidos são substâncias lı́quidas e gasosas. A propriedade de escoamento decorre da ausência de resistência à forças aplicadas em direções paralelas à superfı́cie do fluido. 4.1 Grandezas Básicas Até o momento descrevemos o movimento de corpos rı́gidos cujas propriedades do movimento eram bem caracterizadas pelas grandezas como a força e a massa. No caso de fluidos, que não apresentam uma forma fixa, devemos definir grandezas equivalentes à força e à massa associadas a valores pontuais. Estas grandezas equivalentes são a pressão e a densidade (também chamada de massa especı́fica). 4.1.1 Densidade A densidade ρ de um fluido é obtida tomando-se um pequeno elemento de volume ∆V em torno de um ponto do fluido e medindo sua massa ∆m correspondente. A densidade é definida por: ρ= ∆m . ∆V (4.1) Tecnicamente a densidade é definida tomando-se o limite ∆V → 0. Na prática, consideramos um elemento de volume pequeno comparado com as dimensões do recipiente onde o fluido se encontra, mas ainda grande o suficiente em comparação com a escala atômica, de maneira que este elemento de volume seja contı́nuo. Também consideramos que ρ é constante em todos os pontos do fluido, assim, também 129 130 CAPÍTULO 4. FLUIDOS podemos escrever: m . V ρ= (4.2) Na tabela abaixo, vemos dois exemplos de valores de densidade. No caso do ar, a densidade é bem pequena mas varia significativamente com a variação da pressão. No caso da água em estado lı́quido, a variação da densidade é insignificante, e podemos considerar a água como um lı́quido incompressı́vel. Note que a densidade tem dimensões de kg/m3 no sistema internacional. 4.1.2 densidade condições valor ρAr 20o C e 1 atm 1,21 kg/m3 ρAr 20o C e 50 atm 60,5 kg/m3 ρH2 O 20o C e 1 atm 0,998×103 kg/m3 ρH2 O 20o C e 50 atm 1,000×103 kg/m3 Pressão Considere um recipiente contendo um fluido dentro do qual é colocado um sensor de pressão conforme mostrado na Fig. 4.1. O sensor é formado por um êmbolo de área ∆A que pode deslizar no interior de um cilindro fechado que repousa sobre uma mola. Um mostrador indica o deslocamento da mola (calibrada ) ao ser comprimida pelo fluido, indicando assim o módulo ∆F⃗ da força normal que age sobre o êmbolo. Definimos a pressão sobre o êmbolo como: p= ∆F . ∆A (4.3) Teoricamente p é definido num dado ponto no limite da razão dada pela Eq. (4.3) quando ∆A → 0, com centro neste ponto. Quando a força não varia (uniforme) em uma superfı́cie de área A, então podemos escrever, p= F A (4.4) onde F é o módulo da força F⃗ normal à superfı́cie de área A. Observamos experimentalmente que a pressão dentro de um fluido em repouso é a mesma qualquer que seja a orientação do sensor de pressão da Fig. 4.1. Assim, a pressão p é uma grandeza escalar envolvendo apenas o módulo da força. 4.1. GRANDEZAS BÁSICAS 131 A unidade de pressão no sistema internacional de unidades é o pascal (Pa), cuja relação com as outras unidades de pressão é dada abaixo: 1 atm = 1, 01 × 105 Pa = 760 Torr = 14, 7 lb/in2 sensor de pressão vácuo Figura 4.1: (a) No esquema acima é mostrado um sensor simples para medir a pressão do gás encerrado no recipiente. (b) Detalhe do sensor de pressão, que mede a força sobre a área do êmbolo através do deslocamento da mola calibrada. Note que no interior do êmbolo temos vácuo. Exemplo 1. Uma sala tem 4, 2 m de comprimento, 3, 5 m de largura e 2, 4 m de altura. Qual é o peso do ar da sala se a pressão do ar é 1 atm? Par = mg = ρV g = 1, 21 kg/m3 × 4, 2 m × 3, 5 m × 2, 4 m × 9, 8 m/s2 = 420 N. 132 CAPÍTULO 4. FLUIDOS 4.2 Fluidos em Repouso (Hidrostática) Considere um recipiente com água ou qualquer outro lı́quido em repouso contido em um recipiente aberto como mostrado na Fig. 4.2. O objetivo aqui é determinar a pressão hidrostática (pressão exercida pelo fluido em repouso) em função da profundidade no fluido. Para isso, consideramos uma porção do fluido, que tomamos como sendo um volume cilı́ndrico de área A e altura y1 − y2 . Temos três forças ar água nível 1 nível 2 Figura 4.2: Um recipiente no qual uma amostra cilı́ndrica imaginária de água de área basal A está em equilı́brio. A força F⃗1 atua na área superior do cilindro ; a força F⃗2 atua na base inferior do cilindro; a força gravitacional sobre a água no cilindro é representada por m⃗g . atuando sobre o volume do lı́quido que denotamos como: F⃗1 , F⃗2 e m⃗g . Desde que o lı́quido se encontra em equilı́brio estático, ou seja, está em repouso, a soma das forças atuando sobre a porção do lı́quido devem ser nulas: F⃗1 + F⃗2 + m⃗g = 0 onde m é massa do fluido dentro do volume considerado. A força F⃗1 é a força exercida pelo lı́quido que se encontra acima do o volume de lı́quido que estamos considerando; a força F⃗2 é a força exercida pelo lı́quido sob a porção inferior do lı́quido; m⃗g corresponde ao peso do lı́quido contido no volume que estamos considerando. Assim, F⃗1 e m⃗g apontam para baixo e F⃗2 aponta no sentido contrário, para cima. Desde que estamos considerando aqui apenas forças na direção vertical, podemos trabalhar apenas com módulo das forças e indicando o sentido apenas pelo sinal, assim escrevemos: F2 = F1 + mg 4.2. FLUIDOS EM REPOUSO (HIDROSTÁTICA) 133 e usando a definição da pressão dada pela Eq. (4.8) p2 A = p1 A + mg além disso, considerando a definição da densidade dada pela Eq. (4.2), podemos escrever a massa do fluido contido no cilindro de V = A(y1 − y2 ) na seguinte forma: p2 A = p1 A + ρA(y2 − y1 )g e simplificando a área A, obtemos a primeira equação fundamental da hidrostática: p2 = p1 + ρ(y1 − y2 )g (4.5) com ρ sendo a densidade do fluido em equilı́brio. A Eq. (4.5) permite determinar a pressão tanto em um lı́quido (em função da profundidade) como na atmosfera (em função da altitude). No primeiro caso, vamos determinar a pressão a um profundidade h. Para isso, substituı́mos os seguintes dados na Eq. (4.5): y1 = 0, y2 = −h, p1 = p0 (pressão atmosférica) e p2 = p, assim, p = p0 + ρhg (4.6) Temos duas observações importantes a fazer sobre a Eq. (4.6): a primeira é que a pressão cresce com a profundidade, ou seja, quanto mais fundo maior a pressão. Isso permite que objetos imersos possam ficar em equilı́brio no interior de um fluido desde que a força na superfı́cie inferior é maior que na superior; a outra observação é que a coordenada horizontal não entra nas equações, assim, se nos deslocamos horizontalmente em um lı́quido ou gás, iremos sofrer a mesma pressão. Note também que a pressão a uma profundidade h no interior de um lı́quido apresenta duas contribuições: a pressão do volume de lı́quido acima de h (= ρgh) e a pressão atmosférica (= p0 ). A diferença entre a pressão sentida na profundidade h e a pressão atmosférica é chamada pressão manométrica: pm = p − p0 = ρgh. Vamos considerar agora a pressão a uma determinada altitude d. Para isso, entramos com os seguintes parâmetros na Eq. (4.5): y1 = 0, y2 = d, p1 = p0 (pressão atmosférica ao nı́vel do mar), p2 = p e ρ = ρar : p = p0 − ρar gd. (4.7) que mostra que a pressão que sentimos é reduzida à medida que subimos em lugares mais altos em relação ao nı́vel do mar. Este resultado é óbvio desde que temos cada vez menos atmosfera em cima de nós para altitudes cada vez maiores. 134 CAPÍTULO 4. FLUIDOS Exemplos 1. Um mergulhador novato, praticando em uma piscina, inspira ar suficiente para expandir totalmente os pulmões antes de abandonar o tanque a uma profundidade L e nadar para a superfı́cie. Ele ignora as instruções e não exala o ar durante a subida. Ao chegar à superfı́cie, a diferença entre a pressão que está submetido e a pressão no interior dos seus pulmões é de 9, 3 kPa. De que profundidade partiu? Que risco fatal estaria correndo? Aqui usamos a Eq. (4.6) fazendo h = L para determinar a pressão que o mergulhador está submetido no interior da piscina: pi = p0 + ρLg. Quando o mergulhador inspira o ar do tanque, antes de abandoná-lo, ele teve que igualar a pressão no interior dos seus pulmões à pressão pi dada pela equação acima. Caso contrário, não conseguiria respirar. Assim, quando sobe à superfı́cie, a pressão externa diminui para o valor igual a pf = p0 . Portanto, a diferença de pressão entre os seus pulmões e o meio externo é dada por: ∆p = pi − pf = p0 + ρLg − p0 assim, ∆p = ρLg donde obtemos a profundidade L: L= 9, 3 kPa ∆p = = 0, 95 m. 3 ρg 0, 998 × 10 kg/m3 × 9, 8 m/s2 Vemos que alta diferença de pressão corresponde a uma profundidade de aproximadamente 1 metro, mas capaz de romper os pulmões do mergulhador forçando a passagem de ar para a corrente sanguı́nea que é transportada para coração provocando uma embolia. Assim, mergulhador corre risco de morte caso não expire o ar à medida que sobe para a superfı́cie de maneira a igualar a pressão no interior de seus pulmões com a pressão atmosférica. 2. Um tubo em forma de U da Fig. 4.3 contém dois lı́quidos em equilı́brio estático: no lado direito existe água de densidade 0, 998 × 103 kg/m3 e do lado esquerdo óleo com uma densidade desconhecida que chamamos de ρX . Os valores das distâncias são h = 12, 3 mm e l = 135 mm. Qual é o valor de ρX ? No lado direito temos: 4.2. FLUIDOS EM REPOUSO (HIDROSTÁTICA) 135 óleo água interface Figura 4.3: Veja exemplo 2. ρint = p0 + ρH2 O gl e no lado esquerdo temos: ρint = p0 + ρX g(l + d) e eliminado ρint entre as duas equações acima, segue que: p0 + ρX g(l + d) = p0 + ρH2 O gl e isolando a densidade do óleo, segue que: ρX 4.2.1 l = ρH2 O = 998kg/m3 × l+d ( 135 135 + 12, 3 ) = 915 kg/m3 Medindo a pressão Pressão atmosférica O último exemplo nos permitiu mostrar como determinar a densidade de outro tipo de lı́quido dado que conhecemos a densidade de um segundo lı́quido. O uso de colunas de lı́quido também nos permite determinar a pressão. Um exemplo clássico é o barômetro de mercúrio, usado por Torricelli para medir a pressão atmosférica. Na Fig. 4.4a temos o esquema do instrumento que consiste de um tubo longo que é enchido com mercúrio e, em seguida, é virado com a abertura para baixo dentro de um recipiente cheio de mercúrio. A pressão atmosférica deve ser igual à pressão da coluna do tubo desde que a a pressão na ponta fechada sem lı́quido é zero. Assim, a medida da altura nos fornece uma medida da pressão 136 CAPÍTULO 4. FLUIDOS atmosférica. Usando a Eq. (4.5) com p2 = 0 correspondendo a pressão na altura h e p1 = p0 na base do tubo em y1 = 0, obtemos: 0 = p0 + ρg(0 − h) ou seja, p0 = ρgh que nos fornece o valor da pressão atmosférica através da altura da coluna de mercúrio. Note que este resultado depende da aceleração da gravidade e da densidade do mercúrio. Assim, devemos efetuar a medida sob condições adequadas com g dado pelo seu valor no nı́vel do mar e a temperatura do mercúrio igual a 0o C. nível 1 nível 2 nível 2 nível 1 tanque manômetro Figura 4.4: (a) um barômetro de mercúrio usado para medir a pressão atmosférica. (b) um manômetro usado para medir a pressão manométrica do gás pg . Pressão manométrica Vamos agora considerar o sistema mostrado na Fig. 4.4b onde temos um gás encerrado em um balão. Queremos determinar a pressão manométrica definida pela diferença entre a pressão medida no interior do sistema e a pressão atmosférica. Para isso utilizamos o manômetro composto pelo tubo em U como mostrado. Na interface entre o gás e o lı́quido do tubo, a pressão pode ser determinada via Eq. (4.5), 4.2. FLUIDOS EM REPOUSO (HIDROSTÁTICA) 137 assim temos: p2 = p1 + ρ(y1 − y2 )g e considerando que a pressão na interface é dada por p2 em y2 = 0, obtemos: p = p0 + ρ(h − 0)g ∴ p = p0 + ρhg A pressão manométrica do gás é dada por: pg = p − p0 = ρhg 4.2.2 O princı́pio de Pascal O princı́pio de Pascal nos diz que a variação da pressão aplicada a um fluido incompressı́vel contido em um recipiente é transmitida integralmente e igualmente a todas as partes do fluido e às paredes do recipiente. Na Fig. 4.5 mostramos um pistão sobre o qual é colocado um recipiente com esferas de chumbo. Assim, mudando o número de esferas dentro do recipiente podemos variar o peso do recipiente e, portanto, a pressão aplicada no pistão. A pressão a uma certa profundidade h é dada por: p = pext + ρgh onde pext é a pressão aplicada pelo recipiente contendo as esferas de chumbo. Se adicionamos mais esferas, o que faz aumentar a pressão externa, então desde que o fluido é incompressı́vel, a altura h não é alterada pois o pistão não se move. Assim, tomando a diferencial de ambos os lados da equação acima, segue que: dp = dpext e vemos que a variação da pressão independe do valor de h o que significa que a variação da pressão é a mesma para todos os pontos do lı́quido. Aplicação do Princı́pio de Pascal A principal aplicação do princı́pio de Pascal é o chamado macaco hidráulico. Este dispositivo é basicamente um tubo de diâmetro variável contendo dois pistões em suas extremidades. Conforme mostrado na Fig. 4.6, o macaco hidráulico está submetido a uma força de módulo Fe no pistão da esquerda que provoca uma variação de pressão ∆p = Fe /Ae que é distribuı́da sobre todo o lı́quido (a área do pistão esquerdo é igual a Ae ). Como resultado, esta diferença de pressão provoca uma força Fs no pistão da direita que tem uma área de seção transversal As . 138 CAPÍTULO 4. FLUIDOS esferas de chumbo pistão líquido Figura 4.5: Pistão usado para demonstrar o princı́pio de Pascal. Quando aumentamos a pressão no pistão, esta deve aumentar igualmente em todos os pontos do fluido dentro do recipiente pois o volume permanece constante. Desde que a diferença de pressão é a mesma sobre todo o o lı́quido, podemos determinar a força de saı́da Fs : Fs = As ∆p e considerando que ∆p = Fe Ae então podemos escrever a força de saı́da em termos da força aplicada no pistão da esquerda: Fs = As Fe Ae (4.8) A Eq. (4.8) nos mostra que a força Fs pode ser maior do que a força aplicada no pistão esquerdo se As > Ae . Além disso, desde que a quantidade de volume deslocado no processo deve ser o mesmo, então podemos escrever: Ve = Vs Ae de = As ds onde de e ds são os deslocamentos verticais dos pistões esquerdo e direito, respectivamente. Isolando ds , temos: ds = Ae de As 4.2. FLUIDOS EM REPOUSO (HIDROSTÁTICA) 139 e portanto, ds < de se As > Ae . Isso nos mostra que embora consigamos aumentar a força aplicada no pistão de saı́da, vamos conseguir movimentá-lo por uma distância menor. No entanto, a quantidade de trabalho realizada nos dois pistões é a mesma. Podemos ver isso calculando o trabalho realizado pelo pistão direito: Ws = Fs ds = As Ae Fe de = Fe de = We Ae As e vemos que o trabalho realizado pelos dois pistões é o mesmo. O macaco hidráulico tem muitas utilidades, mas certamente a mais lembrada é o seu uso em oficinas mecânicas para levantar carros. s s e e s fluido incompressível e Figura 4.6: Esquema de um macaco hidráulico que utiliza o princı́pio de Pascal. A força Fs pode ser maior do que a força Fe aplicada na lado esquerdo dado que as áreas dos pistões sejam tais que As > Ae . 4.2.3 O princı́pio de Arquimedes Anteriormente, determinamos a variação da pressão com a profundidade de um fluido e constatamos que a pressão aumenta a medida que nos deslocamos para pontos mais profundos no fluido. A Eq. (4.5) relaciona as pressões em dois pontos P1 e P2 dentro de um fluido em função da distância entre eles: p2 = p1 + ρg(y1 − y2 ) 140 CAPÍTULO 4. FLUIDOS onde consideramos que P2 é um ponto mais abaixo do fluido em comparação com o ponto P1 . Este fato implica que a pressão inferior do fluido é maior do que a pressão de cima, ou seja, temos uma ⃗ Para determiná-lo, vamos força resultante para cima que atua no fluido, que chamamos de empuxo, E. considerar um cilindro circular com área de base A imerso em um fluido como mostrado na Fig. 4.7. As forças que o lı́quido aplica sobre o cilindro são dadas por: F1 = p1 A atuando para baixo devido ao peso do lı́quido acima do cilindro e F2 = p2 A que atua de baixo para cima devido ao lı́quido abaixo do cilindro. Figura 4.7: Um cilindro imerso em um fluido. Note que a pressão na região inferior do fluido, abaixo do cilindro, é maior do que a pressão na região superior do cilindro. Por esta razão, surge uma pressão de baixo para cima que gera uma força que chamamos de empuxo. O empuxo é a força resultante da soma destas duas forças: E = F2 − F1 = (p2 − p1 )A dirigida para cima. Mas a diferença de pressão p2 − p1 já foi determinada pela Eq. (4.5), assim: E = ρg(y1 − y2 )A = ρghA onde h é a altura do cilindro. Assim, notando que V = Ah, temos ainda E = ρgV 4.2. FLUIDOS EM REPOUSO (HIDROSTÁTICA) 141 e usando a definição da densidade, identificamos a massa do fluido mf = ρV , logo E = mf g (4.9) Vemos então que o módulo do empuxo é igual ao peso do fluido deslocado pelo corpo. Quando imergimos um objeto em um fluido este irá flutuar se o peso do corpo for igual ao peso do fluido deslocado pelo mesmo. Com efeito, a condição de equilı́brio é satisfeita quando a soma das forças que atuam sobre o corpo é nula. Assim, no caso do corpo flutuante, temos duas forças atuando: a força de empuxo para cima e a força de gravidade para baixo, assim, podemos escrever a condição para que um corpo flutue como: E = Fg (4.10) Exemplo 1. Na Fig. 4.8 um bloco de massa especı́fica ρ = 800 kg/m3 flutua em um fluido de massa especı́fica ρf = 1200 kg/m3 . O bloco tem altura H = 6, 0 cm. (a) Qual é a altura h da parte submersa? Figura 4.8: Veja exemplo 2. Desde que o bloco está flutuando, então vale a condição dada pela Eq. (4.10) E = Fg . Temos que determinar explicitamente as formas das forças E e Fg . Assim, temos que: E = mf g = ρf V g = ρf Ahg e o peso do bloco é dado por: Fg = mg = ρAHg 142 CAPÍTULO 4. FLUIDOS Substituindo-se estas expressões na condição (4.10), segue que: ρf Ahg = ρAHg e simplificando os fatores semelhantes obtemos: h= ρ H ρf e substituindo os valores correspondentes obtemos o valor de h: 800 kg/m3 h= × 6, 0 cm = 4, 0 cm. 1200 kg/m3 (b) Se o bloco é totalmente imerso e depois liberado qual é aceleração do bloco? Agora o empuxo será maior do que a força peso desde que o bloco está totalmente imerso e, assim, o volume do fluido deslocado corresponde ao volume do bloco, assim: E = ρf AHg e substituindo na segunda lei de Newton segue que: E − Fg = ρf AHg − ρAHg = ma = ρAHa e simplificando os fatores semelhantes obtemos: ρa = (ρf − ρ)g ( a= ) ρf −1 g ρ e substituindo-se os valores correspondentes, obtemos: ( a= ) 3 − 1 g = g/2 2 ou seja, a = 4, 5 m/s2 . 4.3. DINÂMICA DOS FLUIDOS IDEIAIS 4.3 143 Dinâmica dos fluidos ideiais Aqui consideramos o movimento dos fluidos, no entanto, consideramos que o fluido sob estudo é um fluido ideal. Para ser um fluido ideal, quatro pré-requisitos precisam ser satisfeitos: (a) escoamento laminar : no escoamento laminar, a velocidade do fluido em um ponto fixo qualquer não varia no tempo, nem em módulo e em direção. Um exemplo tı́pico deste escoamento é a fumaça de cigarro que começa a escoar de maneira laminar, mas com o aumento da velocidade a medida que sobe passa de laminar para turbulenta; (b) escoamento incompressı́vel : supomos, como no caso dos fluidos em repouso, que o fluido é incompressı́vel, i.e., a densidade do fluido permanece uniforme; (c) escoamento não-viscoso: de maneira coloquial, a viscosidade é uma resistência que o fluido oferece ao escoamento. É o análogo do atrito no caso do movimento dos corpos rı́gidos. Aqui supomos que os fluidos não apresentam esta caracterı́stica; (d) escoamento irrotacional : se consideramos um grão de areia se movendo com o fluido, então quando o fluido é irrotacional, o grão de areia não gira em torno de um eixo que passa por seu centro de massa. A trajetória descrita por um fluido pode ser ilustrada por meio das chamadas linhas de fluxo onde a velocidade de um elemento de fluxo é tangente às linhas de campo. Esta construção é bastante útil para visualizar o fluido em movimento. linhas de fluxo elemento de fluido Figura 4.9: Linhas de fluxo representando a trajetória descrita pelo fluido. A velocidade de uma partı́cula do fluido é tangente às linhas de fluxo. 144 CAPÍTULO 4. FLUIDOS A seguir, vamos obter duas equações fundamentais na descrição de fluidos ideais em movimento: a equação da continuidade e a equação de Bernoulli. Estas equações permitem relacionar a pressão e densidade com a velocidade do fluido e, assim, descrever o movimento do fluido em situações gerais. No entanto, estas equações estão aqui restritas aos fluidos ideais, de modo que as condições acima estão implı́citas na suas aplicações. 4.3.1 Equação da continuidade A velocidade da água em uma mangueira depende da área da seção reta através da qual a água escoa. Percebemos isso quando tapamos parte desta área com os dedos e a velocidade do jato de água aumenta alcançando distâncias maiores. O objetivo é determinar uma expressão para o fluxo em termos da velocidade v e a área A de um tubo com seção reta variável. Suponhamos que em um intervalo de tempo ∆t, um volume ∆V do fluido entre na extremidade esquerda do tubo, como mostrado na Fig. 4.10a. Devido ao fluido ser incompressı́vel, uma quantidade igual ∆V de fluido deve sair na extremidade direita do fluido. Como o volume é igual, então podemos usar este fato para relacionar os volumes e as áreas nas duas extremidades do tubo. Assim, tomando um elemento do fluido com velocidade constante, então durante o tempo ∆t, o elemento percorreu uma distância ∆x. Portanto, o elemento de volume do fluido deslocado neste intervalo de tempo será: ∆V = A∆x = Av∆t este elemento de volume deve ser o mesmo nas duas extremidades, ou seja, A1 v1 ∆t = A2 v2 ∆t e eliminando os intervalos de tempo em ambos os lados, obtemos a equação da continuidade: A1 v1 = A2 v2 O produto da área da seção reta pela velocidade do fluido é definida como a vazão RV : RV = Av que é medida em m3 /s. Assim, a Eq. (4.11) pode ser escrita na forma alternativa: RV = Av = constante. (4.11) 4.3. DINÂMICA DOS FLUIDOS IDEIAIS 145 (a) tempo t (b) tempo t+Dt Figura 4.10: Um fluido escoa da esquerda para a direita com vazão constante através de um segmento de tubo de comprimento L. A velocidade do fluido é v1 no lado esquerdo e v2 no lado direito. A área de seção reta é A1 no lado esquerdo do tubo e A2 no lado direito. Do instante t em (a) até o instante t + ∆t em (b), a quantidade de fluido mostrada em cor violeta entra do lado esquerdo e uma quantidade igual mostrada em cor verde sai pelo lado direito. Se a densidade do fluido é constante, podemos definir a chamada vazão mássica Rm : Rm = ρRV = ρAv = constante. que é expressa em kg/s. Exemplo 1. A Fig. 4.11 mostra que o jato de água que sai de uma torneira fica progressivamente mais fino durante a queda. As áreas das seções retas indicadas são A0 = 1, 2 cm2 e A = 0, 35 cm2 . Os dois nı́veis estão separados por uma distância vertical h = 45 mm. Qual é a vazão da torneira? Sabemos que a vazão nos dois pontos indicados na Fig. 4.11 deve ser a mesma. Portanto, a igualdade a seguir deve ser satisfeita: A0 v0 = Av Desde que o fluxo que sai da torneira está sob à ação da força gravitacional, então as velocidades nos 146 CAPÍTULO 4. FLUIDOS Figura 4.11: Veja exemplo 1. dois pontos devem estar relacionadas pela equação: v 2 = v02 − 2g(0 − h) onde usamos um referencial em que a origem está no primeiro ponto e o segundo em uma posição y2 = −h. Rearranjando a equação acima podemos escrever ainda v 2 = v02 + 2gh e eliminado a velocidade v através da equação da vazão, segue que: A20 2 v = v02 + 2gh A2 0 e isolando a velocidade inicial, obtemos √ v0 = 2ghA2 A20 − A2 A vazão agora pode ser determinada usando: √ R V = A 0 v0 = 2ghA2 A20 A20 − A2 e substituindo-se os valores correspondentes obtemos ainda: √ 2 × 9, 8 m/s2 × 4, 5cm × (0, 35cm2 )2 (1, 2cm2 )2 RV = (1, 2cm2 )2 − (0, 35cm2 )2 4.3. DINÂMICA DOS FLUIDOS IDEIAIS 147 RV = 34 cm3 /s. 4.3.2 Equação de Bernoulli Vamos considerar agora que o fluxo do fluido apresenta uma velocidade variável, resultante de uma diferença de pressão entre as duas extremidades de um tubo de fluxo. Além disso, também consideramos a influência da gravidade, desde que esta produz variações na energia potencial do fluido quando este se desloca em diferentes alturas em relação à superfı́cie da Terra. Para determinar a equação que descreve o movimento do fluido, considere que o mesmo se desloca ao longo de uma distância horizontal L e uma distância vertical y2 − y1 , conforme mostrado na Fig. 4.12. Para que o fluido se desloque ao longo desta trajetória, aplicamos uma pressão pressão p1 na extremidade inferior do tubo, como mostrado na Fig. 4.12. Como resultado, o fluido apresenta uma velocidade v1 na extremidade inferior do tubo e sai com uma velocidade diferente v2 na outra extremidade do tubo. Note que existe uma pressão p2 em y2 aplicada pelo fluido que está à frente do volume deslocado e, portanto, é aplicada no sentido contrário ao deslocamento do fluido. O trabalho resultante W da diferença de pressão nas duas extremidades, provoca uma variação na energia mecânica do sistema que corresponde à variações na energia cinética e potencial do fluido. Este trabalho é dado por: W = (F1 − F2 )∆x = (p1 A1 − p2 A2 )∆x ou seja, W = (p1 − p2 )∆V onde consideramos aqui que ∆V1 = ∆V2 = ∆V , ou seja, a quantidade de matéria que entra no tubo deve ser a mesma quantidade que sai. O trabalho provoca uma variação da energia cinética do fluido, de acordo com o teorema trabalho-energia cinética. Assim, temos: ∆K = K2 − K1 e considerando que o elemento de volume deslocado tenha uma massa m, podemos escrever 1 1 ∆K = mv22 − mv12 2 2 148 CAPÍTULO 4. FLUIDOS entrada (a) saída (b) Figura 4.12: Um fluido escoa com vazão constante através de um comprimento L de um tubo, da extremidade de entrada à esquerda, até a extremidade de saı́da, à direita. Do instante t em (a) ao instante t + ∆t em (b) uma quantidade de fluido, representada pela cor violeta, entra pela extremidade esquerda e uma quantidade igual, representada na cor verde, sai pela extremidade direita. e usando a definição da densidade do fluido, que é considerada constante, temos ainda, ( ) 1 2 1 2 ∆K = ρv2 − ρv1 ∆V 2 2 Além disso, o trabalho deve provocar uma variação ∆U correspondente na energia potencial gravitacional. Esta variação é dada por: ∆U = mgy2 − mgy1 = ρg∆V (y2 − y1 ) A soma das variações ∆K e ∆U deve ser igual à variação total da energia mecânica do sistema devida ao trabalho externo aplicado pela diferença de pressão nas extremidades do tubo. Assim, podemos escrever: W = ∆E = ∆U + ∆K 4.3. DINÂMICA DOS FLUIDOS IDEIAIS 149 e substituindo as expressões correspondentes, segue que: ( (p1 − p2 )∆V = ) 1 2 1 2 ρv − ρv ∆V + ρg∆V (y2 − y1 ) 2 2 2 1 e vemos que podemos eliminar o elemento de volume que é o mesmo em todos os termos: 1 1 p1 − p2 = ρv22 − ρv12 + ρg(y2 − y1 ) 2 2 podemos escrever a equação acima na seguinte forma: 1 1 p1 + ρv12 + ρgy1 = p2 + ρv22 + ρgy2 2 2 (4.12) Podemos reescrever a Eq. (4.12) na forma: 1 p + ρv 2 + ρgy = constante. 2 (4.13) A Eq. (4.13) foi deduzida pela primeira vez por Daniel Bernoulli que estudou o escoamento de fluidos pela primeira vez no séc. XVIII. A Eq.(4.12) é bastante geral e podemos naturalmente recuperar o caso mais simples de um fluido em repouso que estudamos na seção anterior. Com efeito, considerando que o fluido está repouso, então v1 = v2 = 0 e a Eq. (4.12) se reduz a: p2 + ρgy2 = p1 + ρgy1 ou seja, p2 = p1 + ρg(y1 − y2 ) que é a Eq. (4.5) que obtivemos anteriormente. Uma outra particularização importante da equação de Bernoulli, é o caso em que o escoamento ocorre na direção horizontal mas com velocidades diferentes nos pontos 1 e 2, assim, fazendo y1 = y2 = y na Eq. (4.12), segue que: 1 1 p1 + ρv12 + ρgy = p2 + ρv22 + ρgy 2 2 e eliminando os termos em comum, obtemos ainda: 1 1 p1 + ρv12 = p2 + ρv22 2 2 De acordo com a equação acima, se v2 < v1 então devemos ter p1 > p2 . Assim, vemos que a pressão deve diminuir com o aumento da velocidade do fluido. Nos resta fazer alguns exemplos de aplicação da equação de Bernoulli. 150 CAPÍTULO 4. FLUIDOS Exemplos 1. Na Fig. 4.13, a água doce atrás de uma represa tem uma profundidade D = 15 m. Um cano horizontal de 4,0 cm de diâmetro atravessa a represa a uma profundidade d = 6, 0 m. Uma tampa fecha a abertura do cano. (a) Determine o módulo da força de atrito entre a tampa e o cano. (b) A tampa é retirada. Qual é o volume de água que sai do cano em 3, 0 h? Figura 4.13: Veja exemplo 1. (a) A pressão p2 na altura onde se encontra o cano pode ser determinada via Eq. (4.5): p2 = p0 + ρg(0 − (−d)) = p0 + ρgd. Agora precisamos determinar a força resultante sobre a tampa. Temos três forças atuando. A primeira é devida à pressão da água da represa que acabamos de calcular. A força está dirigida para fora da represa e seu módulo é dado por F2 = p2 A. Além desta força, no lado de fora da represa, temos apenas a pressão atmosférica que empurra a tampa para dentro da represa. Assim, a força correspondente tem módulo F1 = p0 A e tem sentido contrário a F2 . Além das forças devido à diferença de pressão entre o interior e exterior da represa, temos ainda a força de atrito estático fs que também aponta no sentido contrário à força F2 . Assim, para que a tampa permaneça no lugar, a soma destas forças deve ser nula, assim devemos ter: F1 + fs = F2 4.3. DINÂMICA DOS FLUIDOS IDEIAIS 151 ou seja, p0 A + fs = p0 A + ρgdA ou seja, o módulo da força de atrito é dado por: fs = ρgdA = 103 kg/m3 × 9, 8 m/s2 × 6, 0 m × π × (4, 0 × 10−2 m)2 4 fs = 74 N. (b) Para determinar a quantidade de água que sai quando a tampa é retirada, devemos aplicar a Eq. (4.12) na superfı́cie da represa e na altura onde se encontra o cano. Assim, temos: 1 1 p1 + ρv12 + ρgy1 = p2 + ρv22 + ρgy2 2 2 1 1 p0 + ρ(0)2 + ρgd = p0 + ρv22 + ρg(0) 2 2 onde consideramos que a velocidade da água é nula na superfı́cie da represa e que a pressão no ponto de saı́da é igual à pressão atmosférica pois retiramos a tampa e então temos apenas a pressão atmosférica atuando sobre o fluxo da água, logo 1 ρgd = ρv22 2 ou seja, v2 = √ 2gd e a vazão é dada por: R2 = A2 v2 onde A2 é a área do cano. A quantidade de água que sai em 3,0 h pode ser determinada multiplicando a vazão calculada por este tempo: ∆V = A2 v2 ∆t = π × (4, 0 × 10−2 m)2 4 √ 2 × 9, 8 m/s2 × 6, 0 m × 3, 0 h 152 CAPÍTULO 4. FLUIDOS ∆V = 1, 5 × 102 m3 2. Um medidor venturi é usado para medir a velocidade de um fluido em um cano. O medidor é ligado entre dois segmentos do cano (veja a Fig. 4.8); a seção reta A na entrada e saı́da do medidor é igual à seção reta do cano. Entre a entrada e a saı́da do medidor o fluido escoa com velocidade V e depois passa com velocidade v pelo gargalo estreito de seção reta a. Um manômetro liga a parte mais larga do medidor à parte mais estreita. A variação da velocidade do fluido é acompanhada por uma variação ∆p da pressão do fluido, que produz uma diferença h na altura do lı́quido nos dois lados do manômetro. (A diferença ∆p corresponde à pressão no gargalo menos a pressão do cano). (a) Aplicando a equação de Bernoulli e a equação da continuidade aos pontos 1 e 2 na Fig. 4.8, mostre que √ 2a2 ∆p V = ρ(a2 − A2 ) onde ρ é a densidade do fluido. (b) Suponha que o fluido é água doce, que a seção reta é 64 cm2 no cano e 32 cm2 no gargalo e que a pressão é 55 kPa no cano e 41 kPa no gargalo. Qual é a vazão de água em metros cúbicos por segundo? entrada do medidor medidor Venturi cano cano manômetro Figura 4.14: Veja exemplo 2. (a) saída do medidor 4.3. DINÂMICA DOS FLUIDOS IDEIAIS 153 A equação da continuidade fornece, AV = av. A equação de Bernoulli é dada por: 1 1 p1 + ρv12 + ρgy1 = p2 + ρv22 + ρgy2 2 2 e particularizando para o caso em questão, obtemos: 1 1 p1 + ρV 2 = p2 + ρv 2 2 2 1 2 1 1 ρV = p2 − p1 + ρv 2 = ∆p + ρv 2 2 2 2 e trocando o valor da velocidade v pela equação da continuidade obtemos ainda: ( )2 1 2 1 2 1 A ρV = p2 − p1 + ρv = ∆p + ρ V 2 2 2 a ou seja, ( ) A2 1 ρ 1 − 2 V 2 = ∆p 2 a 1 ρ 2 ( a2 − A 2 a2 e isolando a velocidade V obtemos ainda √ V = ) V 2 = ∆p 2a2 ∆p ρ(a2 − A2 ) (b) A vazão de água é dada por: RV = AV √ RV = 2a2 A2 ∆p ρ(a2 − A2 ) e substituindo-se os valores correspondentes, obtemos finalmente: √ 2(32 × 10−4 m2 )2 × (64 × 10−4 m2 )2 (41 − 55) kPa RV = 1000 kg/m3 × [(32 × 10−4 m2 )2 − (64 × 10−4 m2 )2 ]) RV = 2, 0 × 10−2 m3 /s 154 CAPÍTULO 4. FLUIDOS Capı́tulo 5 Gravitação 5.1 Introdução Agora vamos estudar a gravitação que é a tendência dos corpos de se atraı́rem mutuamente devido às suas massas. Newton mostrou que todos os corpos no universo se atraem mutuamente. Da mesma forma que um pequeno corpo que lançado para cima na superfı́cie da Terra é atraı́do pela mesma, o mesmo ocorre com a Lua orbitando em torno da Terra. Além disso, assim como a Terra atrai uma pedra com uma força de, digamos, 0,8 N a pedra também atrai a Terra com a mesma força de 0,8 N. No entanto, a aceleração da Terra devido à força aplicada pela pedra é desprezı́vel. Isto ocorre por causa de sua enorme massa. A lei de gravitação, proposta por Newton, nos permite determinar o valor da força entre duas partı́culas de massas m1 e m2 que se atraem mutuamente a uma distância r. O módulo da força é dado pela equação: F =G m1 m2 r2 (5.1) onde G é uma constante dada por: G = 6, 67 × 10−11 N.m2 /kg2 = 6, 67 × 10−11 m3 /kg.s2 Na Fig. 5.1a, F⃗ é a força que a partı́cula 2 exerce sobre a partı́cula 1 . A força aponta para 2 e tende a aproximar a partı́cula 1 da partı́cula 2, e por esta razão dizemos que F⃗ é uma força atrativa. O módulo de F⃗ é dada pela Eq. (5.1). 155 156 CAPÍTULO 5. GRAVITAÇÃO (a) (b) (c) Figura 5.1: (a) A força gravitacional F⃗ que a partı́cula 2 exerce sobre a partı́cula 1 é uma força atrativa porque aponta para a partı́cula 2. (b) A força F⃗ está sobre um eixo radial r. (c) A força F⃗ tem o mesmo sentido que o vetor unitário r̂ do eixo r. A direção de F⃗ está ao longo da linha que une as partı́culas como mostrado na Fig. 5.1b. Assim, definimos um eixo r passando pelas duas partı́culas, o que nos permite reescrever a Eq. (5.1) na forma vetorial: m1 m2 F⃗ = G 2 r̂ r (5.2) onde r̂ é um vetor de módulo unitário com direção ao longo do eixo r e sentido de 1 para 2, veja a Fig. 5.1c. Existe uma segunda força neste sistema de 2 partı́culas que é a força sobre m2 devido a partı́cula m1 . Esta força tem o mesmo módulo e direção da força F⃗ mas sentido contrário, ou seja, apontando de 2 para 1. Embora a Eq. (5.2) seja definida para partı́culas, podemos aplicar a Eq. (5.2) para objetos reais quando seus tamanhos sejam pequenos em comparação com a distância entre eles. A Lua e a Terra 5.1. INTRODUÇÃO 157 estão suficientemente longe uma da outra para que com boa aproximação possam ser consideradas como partı́culas. Por outro lado, o caso de uma pedra atirada para cima na superfı́cie da Terra, em princı́pio, não pode ser descrito pela Eq. (5.2) desde que não podemos considerar a Terra como uma partı́cula neste caso. Com efeito, a Terra parece extensa e plana, e portanto, não se parece como uma partı́cula. Newton resolveu este problema da atração entre a Terra e a pedra provando um teorema importante, conhecido como teorema da casca esférica. O teorema é enunciado da seguinte forma: "Uma casca esférica uniforme de matéria atrai uma partı́cula que se encontra fora da casca como se toda a massa da casca estivesse concentrada em seu centro." A Terra pode ser imaginada como um conjunto de cascas, uma dentro da outra, cada uma atraindo uma partı́cula fora de sua superfı́cie como se a massa da casca estivesse localizada no seu centro. Assim, do ponto de vista da pedra, a Terra se comporta como uma partı́cula que está localizada no centro da Terra e possui uma massa igual à da Terra. 5.1.1 Princı́pio da Superposição Dado um grupo de partı́culas, podemos calcular a força gravitacional a que uma delas está submetida como a soma das forças que as demais partı́culas exercem sobre a mesma. Este é o chamado princı́pio da superposição e, formalmente, podemos escrever a força resultante sobre a partı́cula 1 devido às demais na forma: F⃗1,res = F⃗12 + F⃗13 + F⃗14 + F⃗15 + F⃗16 + · · · + F⃗1n (5.3) o que pode ser colocado na forma mais compacta: F⃗1,res = n ∑ F⃗1i i=2 No caso de um corpo rı́gido, podemos estender o princı́pio da superposição para uma expressão integral: ∫ F⃗1,res = dF⃗ (5.4) Exemplo 1. A Fig. 5.2 mostra um arranjo de três partı́culas: a partı́cula 1, de massa m1 = 6, 0 kg, e as partı́culas 2 e 3, de massas m2 = m3 = 4, 0 kg; a = 2, 0 cm. Qual é a força gravitacional resultante que as outras partı́culas exercem sobre a partı́cula 1? 158 CAPÍTULO 5. GRAVITAÇÃO Figura 5.2: Veja exemplo 1. Temos aplicar o princı́pio da superposição. Considerando a Eq. (5.3), temos: F⃗1 = F⃗12 + F⃗13 e observando a localização das partı́culas, temos então: F⃗1 = F12 ĵ − F13 î e substituindo a Eq. (5.1), segue que: m1 m2 m1 m3 F⃗1 = G 2 ĵ − G î a 4a2 esta é a expressão vetorial para a força que atua sobre a partı́cula 1. Substituindo-se os valores correspondentes, obtemos: 6, 0 kg × 4, 0 kg 6, 0 kg × 4, 0 kg F⃗1 = 6, 67 × 10−11 m3 /kg.s2 × ĵ − 6, 67 × 10−11 m3 /kg.s2 × î −2 2 (2, 0 × 10 m) 4(2, 0 × 10−2 m)2 F⃗1 = (−î + 4ĵ) × 10−6 N. Resta determinar o módulo e a direção correspondentes. Da álgebra vetorial o módulo de um vetor é obtido via teorema de Pitágoras tomando-se as componentes x e y como os catetos de um triângulo retângulo: F1 = √ 1 + 16 × 10−6 N ≈ 4, 1 × 10−6 N 5.2. GRAVITAÇÃO NAS PROXIMIDADES DA SUPERFÍCIE DA TERRA 159 O ângulo pode ser obtido calculando a tangente entre as componentes do vetor F⃗1 : ( ) ( ) F12 4 θ = arctan = arctan ≈ 76o F13 1 que é o ângulo entre o lado negativo do eixo x e o lado positivo do eixo y. Para obter o ângulo em relação ao primeiro quadrante devemos subtrair este ângulo de 180o assim: θ = 180o − 76o = 104o . 5.2 Gravitação nas proximidades da superfı́cie da Terra Vamos supor que a Terra tem uma massa M . O módulo da força que a Terra exerce sobre uma partı́cula m é dada pela Eq. (5.1): F =G Mm r2 A partı́cula de massa m vai sofrer uma aceleração ag dada pela segunda lei de Newton: F = mag e substituindo a fórmula da força obtemos: mag = G Mm r2 ou seja, ag = G M . r2 (5.5) A Eq. (5.5) mostra que ag diminui com a distância da partı́cula em relação ao centro da Terra. Com efeito, quando r → ∞ a aceleração vai a zero. Na tabela abaixo, mostramos alguns valores da aceleração da gravidade para diferentes valores da altitude em relação à superfı́cie da Terra. Altitude (km) ag (m/s2 ) exemplo de altitude 0 9,83 superfı́cie da Terra 400 8,70 órbita de um ônibus espacial 35700 0,225 órbita de um satélite de comunicação O valor de 9, 8 m/s2 foi usado considerando-se que o movimento de rotação da Terra podia ser desprezado. Isto permitiu supor que a aceleração sofrida pela partı́cula é igual à aceleração da gravidade. 160 CAPÍTULO 5. GRAVITAÇÃO Além disso, supomos que a Terra é uma esfera perfeita com uma densidade uniforme de massa. No entanto, estas são apenas aproximações que permitem uma descrição simplificada do movimento dos objetos. Uma descrição mais precisa do movimento dos corpos, sob a influência da força da gravidade, requer uma análise mais cuidadosa sobre como estes fatores alteram o valor de ag . caixote balança caixote Figura 5.3: Um caixote sobre uma balança no equador da Terra, conforme visto por um observador posicionado sobre o eixo de rotação da Terra, em algum ponto acima do pólo norte. O caixote executa um movimento de rotação sob a influência da força gravitacional e a força normal aplicada pela balança. A resultante das forças deve gerar uma força centrı́peta. O movimento de rotação da Terra pode afetar fortemente o valor da aceleração da gravidade desde que qualquer corpo na superfı́cie irá sofrer a ação de uma força centrı́peta que aponta em direção ao centro da Terra. Isto pode ser facilmente observado, fazendo-se a seguinte suposição: imagine um caixote sobre uma balança que está em repouso na superfı́cie da Terra (veja a Fig. 5.3). As forças atuando sobre o caixote são a força gravitacional devido à atração da Terra e a força normal aplicada pela balança sobre a qual o caixote está em repouso. A soma destas duas forças deve ser igual à força centrı́peta que faz com que o caixote percorra a mesma trajetória que a superfı́cie da Terra. Assim, escrevemos: N − mag = −m(ω 2 R) onde o sinal de menos indica que a força centrı́peta tem o mesmo sentido que a força gravitacional. A força normal é igual ao peso registrado pela balança, assim N = mg 5.2. GRAVITAÇÃO NAS PROXIMIDADES DA SUPERFÍCIE DA TERRA 161 e substituindo na equação acima, obtemos: mg − mag = −m(ω 2 R) e eliminado a massa do caixote obtemos finalmente: g = ag − ω 2 R (5.6) A Eq. (5.6) indica que a aceleração sentida na superfı́cie da Terra g é menor do que a aceleração produzida pela atração gravitacional devido à existência da contribuição da aceleração centrı́peta que reduz ag por uma quantidade ω 2 R. Exemplo 1. Um astronauta cuja altura é h = 1, 70 m flutua “com os pés para baixo” em um ônibus espacial em órbita a uma distância r = 6, 77 × 106 m do centro da Terra. Qual é a variação de ag de seus pés e sua cabeça? A expressão para a aceleração da gravidade é dada por: ag = GMT r2 onde MT é a massa da Terra. A variação da aceleração da Terra é obtida diferenciando-se a equação acima, i.e., dag = dag dr dr e substituindo a expressão para a aceleração da gravidade, segue que: dag = −2 GMT dr r3 Neste caso a variação na gravidade com a altura do astronauta implica que dr = h, assim dag = −2 GMT h r3 e substituindo os valores correspondentes obtemos: ) ( 6, 67 × 10−11 m3 /kg.s2 × 5, 98 × 1024 kg × 1, 70 m dag = −2 × (6, 77 × 106 m)3 dag = −4, 37 × 10−6 m/s2 . 162 CAPÍTULO 5. GRAVITAÇÃO 5.3 A aceleração gravitacional no interior da Terra O teorema das cascas de Newton também pode ser aplicado a uma situação na qual a partı́cula se encontra no interior de uma casca uniforme para demonstrar o seguinte: "Uma casca uniforme de matéria n~ ao exerce força gravitacional resultante sobre uma partı́cula localizada em seu interior." Considerando novamente a Terra como um conjunto de cascas esféricas concêntricas, então pelo teorema das cascas, concluı́mos que a força gravitacional seria máxima na superfı́cie na superfı́cie da Terra e diminuiria à medida que nos afastamos da mesma. Por outro lado, caso a partı́cula se movesse para dentro da Terra (por um túnel) a força mudaria por duas razões: (1) aumentaria porque a partı́cula estaria se aproximando do centro; (2) diminuiria porque uma casca de espessura cada vez maior, localizada do lado de fora da partı́cula em relação ao centro da Terra, deixaria de contribuir para a força gravitacional. No caso da Terra a influência (2) predomina e a gravidade diminuiria a medida que a partı́cula se deslocasse em direção ao centro da Terra. No caso real, porém, a força aumenta até uma determinada profundidade e depois começa a diminuir. Este comportamento é resultado da Terra não ser perfeitamente esférica, não tem uma densidade de massa uniforme, etc. Exemplo 1. Na Fig. 5.4, uma cápsula pode se mover ao longo de um túnel que atravessa a Terra. Determine a força gravitacional experimentada pela cápsula de massa m quando está a uma distância r do centro da Terra. Suponha que a Terra é uma esfera uniforme de densidade ρ. A força experimentada pela cápsula de massa m a uma distância r do centro da Terra é dada por: F =G mMint r2 onde Mint é a massa contida dentro da esfera de raio r. Para determinar a força experimentada pela cápsula, precisamos determinar a massa contida nesta esfera. Para isso, usamos o fato da densidade ser constante, assim, temos: 4 Mint = ρVint = ρ πr3 3 e substituindo na equação para a força gravitacional, segue que: F =G m 4 3 ρ πr r2 3 5.4. ENERGIA POTENCIAL GRAVITACIONAL 163 Figura 5.4: Veja exemplo 1. o que pode ser colocado na forma F = 4πρmG r 3 esta força está dirigida para o centro da Terra, assim, podemos escrevê-la na forma vetorial: 4πρmG F⃗ = − rr̂ 3 ou ainda, F⃗ = −Krr̂ = −K⃗r onde, K= 4πρmG 3 e vemos que a forma da força indica que a cápsula irá desenvolver um movimento harmônico simples e ficará se movendo para cima e para baixo no túnel. 5.4 Energia Potencial Gravitacional Nos capı́tulos anteriores, a energia potencial gravitacional foi definida como sendo: U = mgh para uma partı́cula a uma altura h em relação ao solo. 164 CAPÍTULO 5. GRAVITAÇÃO Agora vamos considerar a energia potencial gravitacional sob a luz da teoria da gravitação, onde agora a energia potencial estará associada com à configuração de duas ou mais massas que interagem via força gravitacional. No caso particular de duas partı́culas de massas M e m, a energia potencial é dada por: U = −G Mm r (5.7) onde estamos considerando que a energia potencial é definida em relação a um potencial de referência U = 0 em r → ∞. Note que somente diferenças de energia potencial têm significado fı́sico. O valor absoluto não tem sentido, da mesma forma que a posição de uma partı́cula não têm sentido a menos que seja dito em relação a que origem estamos nos referindo. É importante ressaltar que a energia potencial gravitacional dada pela Eq. (5.7) está associada a uma configuração do sistema de duas partı́culas. Assim, se mudamos a configuração do sistema mudando a distância entre elas, mudamos também a energia potencial. Sendo assim, esta energia não pode ser associada a uma partı́cula em particular mas ao sistema como um todo. Desta forma, não podemos dizer que a energia potencial está dividida entre as partı́culas. No entanto, no caso de um sistema composto por uma bola de tênis e a Terra, normalmente falamos da “energia potencial da bola de tênis”. Isto porque a variação da energia potencial do sistema aparece quase inteiramente na energia cinética da bola de tênis. A enorme massa da Terra implica em uma aceleração quase nula e então podemos desprezar esta contribuição. O importante é ter em mente que a energia potencial é uma quantidade associada a um sistema de partı́culas e não é uma propriedade de apenas uma partı́cula como no caso da energia cinética. No caso de partı́culas com massas comparáveis é imperativo deixar o hábito de dizer “energia potencial de uma determinada partı́cula”. Quando existem mais de duas partı́culas no sistema, ainda podemos determinar a energia potencial. Para isso recorremos ao princı́pio da superposição que sabemos ser válido para a força gravitacional. Assim, calculamos a energia potencial de cada par de partı́culas como se as demais não estivessem presentes e então fazemos a soma da cada um destes termos. Assim, por exemplo, no caso das três partı́culas mostradas na Fig. 5.5, temos: U = −G 5.4.1 m1 m3 m2 m3 m1 m2 −G 2 −G 2 2 r12 r13 r23 Demonstração da Eq. (5.7) Vamos considerar o caso de um sistema composto por uma bola de tênis de massa m e a Terra com uma massa M . Considere que está bola é lançada de uma distância r do centro da Terra até o infinito, onde 5.5. VELOCIDADE DE ESCAPE 165 Figura 5.5: Sistemas com três partı́culas. A energia potencial do sistema é dada pela soma das energias potenciais dos três pares de partı́culas. consideramos que a energia potencial é zero. Assim, lembrando que o trabalho é igual ao negativo da variação da energia potencial, podemos escrever: ∫ ∞ ∆U = U (∞) − U (r) = − F⃗ · d⃗r r e desde que a força gravitacional é conservativa, o trabalho independe da trajetória escolhida para calculálo. Assim, consideramos que a bola é lançada na direção vertical e, portanto, paralelamente à força F⃗ . Assim, podemos escrever ∫ U (∞) − U (r) = + ∞ F dr r desde que F⃗ = −GM m/r2 r̂ e d⃗r = drr̂. E substituindo o valor do módulo de F , obtemos: [ ]∞ ∫ ∞ GM m dr 1 = U (∞) − U (r) = +GM m = GM m − 2 r r r r r e como estamos considerando que o potencial no infinito é zero, então U (∞) = 0, logo: 0 − U (r) = GM m r ou, U (r) = − GM m r que é a equação que gostarı́amos de demonstrar. 5.5 Velocidade de Escape A velocidade para que um objeto seja lançado de maneira que não fique preso na órbita da Terra é chamada de velocidade de escape. Para determinar esta velocidade, imagine que atiramos um objeto de 166 CAPÍTULO 5. GRAVITAÇÃO maneira que sua velocidade será nula apenas no infinito. Assim, como o potencial é nulo no infinito e sua energia cinética também, então a energia mecânica será também nula. Assim, a condição para determinar a velocidade de escape é que a energia total do objeto seja nula. Aplicando o princı́pio de conservação da energia mecânica, segue que: Er = E∞ 1 mM mv 2 − G =0 2 e R onde R é o raio da Terra e M é a sua massa. Isolando a velocidade de escape ve , obtemos: √ 2GM . ve = R Assim, objetos lançados com esta velocidade não ficarão orbitando em torno da Terra. 5.6 As leis de Kepler A partir dos dados compilados por Tycho Brahe (1546-1630), Johannes Kepler (1571-1630) foi capaz de deduzir as suas três leis do movimento planetário. Mais tarde, Newton (1642-1727) mostrou que as leis de Kepler eram uma consequência de sua lei da gravitação. As três leis de Kepler também podem ser usadas para estudar os movimentos de satélites, naturais ou artificiais, em volta da Terra ou qualquer outro corpo cuja massa é muito maior do que a do satélite. A seguir, discutimos as três leis de Kepler em maiores detalhes. 5.6.1 Lei das áreas "A reta que liga um planeta ao Sol varre áreas iguais no plano da órbita em tempos iguais, ou seja, a taxa de variaç~ ao dA/dt da área A com o tempo é constante." De modo qualitativo, esta lei nos diz que os planetas se movem mais rapidamente quando estão mais próximos do Sol e mais lentamente quando estão mais distantes do Sol. A área da cunha na Fig. 5.6a é praticamente a área varrida pelo planeta no intervalo de tempo ∆t. Como temos um triângulo, a área ∆A é dada aproximadamente por: 1 1 ∆A = (r∆θ).r = r2 ∆θ 2 2 que se torna mais exata para um intervalo de tempo cada vez menor, assim, podemos escrever: dA ∆A 1 dθ 1 = lim = r2 = ωr2 . ∆t→0 ∆t dt 2 dt 2 5.6. AS LEIS DE KEPLER 167 Na Fig. 5.6b temos a representação do momento linear do planeta de massa m em termos de suas ⃗ pode ser escrito na forma: componentes radial e tangencial. O momento angular L ⃗ = ⃗r × p⃗ = ⃗r × p⃗r + ⃗r × p⃗⊥ L e como a componente radial é paralela ao vetor posição, o primeiro termo é nulo. Além disso, a componente tangencial p⃗⊥ é perpendicular ao vetor posição assim, podemos escrever ⃗ = rp⊥ ẑ L onde ẑ é um versor perpendicular ao plano da órbita do planeta. O módulo do momento angular pode ser escrito na forma: L = rp⊥ = mv⊥ r e como v⊥ = ωr, temos ainda, L = rp⊥ = mωr2 e substituindo na expressão para a taxa de variação da área varrida pelo planeta, obtemos: L dA = dt 2m e assim, a constatação de que a taxa com a qual a área varrida é constante, implica que o momento angular do planeta é constante. Portanto, a 2a lei de Kepler nada mais é do que a lei de conservação do momento angular. Figura 5.6: (a) No instante ∆t, a reta que liga o planeta ao Sol se desloca de um ângulo ∆θ, varrendo uma área ∆A (sombreada). (b) O momento linear p⃗ do planeta e suas componentes. 168 CAPÍTULO 5. GRAVITAÇÃO 5.6.2 A lei das órbitas "Todos os planetas se movem em órbitas elı́pticas, com o Sol em um dos focos." Na Fig. 5.7 temos uma planeta de massa m se movendo em torno do Sol cuja massa é M . Supomos que M ≫ m, de modo que o centro de massa do sistema planeta-Sol se encontra aproximadamente no centro do Sol. A órbita é especificada através de seu semi-eixo maior a e sua excentricidade e, esta última sendo definida de tal forma que ea é a distância de centro da elipse a um dos focos, F ou F ′ . Uma excentricidade nula corresponde a uma circunferência na qual os dois focos se reduzem a apenas um único ponto central. As órbitas dos planetas têm uma excentricidade muito pequena. A Terra, por exemplo, tem uma excentricidade de apenas 0,0167. Figura 5.7: Um planeta de massa m orbitando em torno do Sol. O Sol, de massa M , ocupa um foco, F , da elipse. O outro foco, F ′ , está localizado no espaço vazio. Os dois focos ficam a uma distância ea do centro da elipse, onde e é a excentricidade da elipse. O semi-eixo maior a da elipse, a distância do periélio Rp (ponto mais próximo do Sol) e a distância do afélio Ra (ponto mais afastado do Sol) também aparecem na Fig. Podemos determinar a forma da trajetória usando-se as ferramentas da análise vetorial e a 2a lei de Newton. Para isso, considere a segunda lei de Newton aplicada a um planeta de massa m girando em torno do sol, que tem massa M , nas mesmas condições citadas acima, i.e., tal que M ≫ m. Neste caso, escrevemos: F⃗ = m⃗a ou seja, m d⃗v GM m =− r̂ dt r2 5.6. AS LEIS DE KEPLER 169 onde r̂ é um versor na mesma direção da linha que liga o planeta ao Sol. Temos então: d⃗v GM = − 2 r̂ dt r (5.8) Lembrando que o momento angular é dado por: ⃗ = ⃗r × p⃗ = m⃗r × ⃗v L e usando ⃗r = rr̂, podemos escrever ⃗ = mr(r̂ × ⃗v ). L (5.9) Agora observe que a velocidade pode ser escrita como: ⃗v = d⃗r dr dr̂ = r̂ + r dt dt dt e substituindo este resultado na Eq. (5.9) segue que: ) ( dr̂ dr̂ dr ⃗ r̂ + r = mr2 r̂ × L = mrr̂ × dt dt dt Agora considere o produto vetorial d⃗v ⃗ GM ⃗ × L = − 2 r̂ × L dt r onde usamos a 2a lei de Newton da Eq. (5.8). Substituindo a Eq. (5.10), vamos obter: ) ( d⃗v ⃗ GM dr̂ × L = − 2 r̂ × mr2 r̂ × dt r dt ou seja, ( ) d⃗v ⃗ dr̂ × L = −GM mr̂ × r̂ × dt dt e usando a identidade vetorial ⃗ × (B ⃗ × C) ⃗ = B( ⃗ A ⃗ · C) ⃗ − C( ⃗ A ⃗ · B) ⃗ A segue que: [ ( ) ] d⃗v ⃗ dr̂ dr̂ × L = −GM m r̂ r̂ · − (r̂ · r̂) dt dt dt e como r̂ · dr̂ = 0 e r̂ · r̂ = 1, vamos obter dt d⃗v ⃗ dr̂ × L = GM m dt dt (5.10) 170 CAPÍTULO 5. GRAVITAÇÃO e dado que o momento angular do planeta é constante, pela lei das áreas, podemos reescrever o sinal da derivada temporal da seguinte forma: ⃗ d(⃗v × L) dr̂ = GM m dt dt e igualando os argumentos das derivadas, obtemos: ⃗ = GM mr̂ + ρ ⃗v × L ⃗. (5.11) onde ρ ⃗ é um vetor constante devido à integração que fizemos acima. Com a Eq. (5.11), podemos escrever: ⃗ = GM m⃗r · r̂ + ⃗r · ρ ⃗r · (⃗v × L) ⃗ ou seja, ⃗ = GM mr + rρ cos θ ⃗r · (⃗v × L) (5.12) onde ρ cos θ é a projeção do vetor ρ ⃗ na direção de ⃗r. O primeiro membro da equação Eq. (5.12) é um produto triplo, assim, como o produto é cı́clico, temos: 2 ⃗ =L ⃗ · (⃗r × ⃗v ) = 1 L ⃗ · (⃗r × p⃗) = L = constante. ⃗r · (⃗v × L) m m E substituindo na Eq. (5.12), segue que: L2 = GM mr + rρ cos θ m (5.13) ou ainda r= 5.6.3 L2 /m L2 /GM m2 = ρ GM m + ρ cos θ 1+ cos θ GM m (5.14) Lei dos perı́odos "O quadrado do perı́odo de qualquer planeta é proporcional ao cubo do semi-eixo maior de sua órbita." Vamos considerar uma órbita circular de raio r, veja a Fig. 5.8. Assim, de acordo com a 2a lei de Newton, temos: F = ma G Mm ω2 r2 =m = mω 2 r 2 r r 5.7. SATÉLITES: ÓRBITAS E ENERGIAS 171 A velocidade angular pode ser trocada pelo perı́odo ω = 2π/T , assim temos ainda: G M 4π 2 = r r2 T2 ou seja, T2 = 4π 2 3 r . GM E vemos que para uma órbita circular é direto mostrar que a lei de Kepler deriva diretamente da lei de Newton. É possı́vel mostrar que, para o caso mais geral de uma órbita com excentricidade diferente de zero, obtemos uma lei similar com r trocado pelo semi-eixo maior a da elipse descrita pelo planeta. Figura 5.8: Um planeta de massa m em órbita circular de raio r em torno do Sol. 5.7 Satélites: órbitas e energias Um satélite orbitando em torno de um planeta em uma trajetória elı́ptica tem tanto a sua velocidade (relacionada com a energia cinética) quanto a sua distância do planeta (relacionada com a energia potencial) variando em todos os pontos da órbita. No entanto, sua energia mecânica permanece constante. A energia potencial do sistema é dada por: U =− GM m r e pela 2a lei de Newton, temos: G v2 Mm =m 2 r r 172 CAPÍTULO 5. GRAVITAÇÃO de onde podemos determinar o valor da energia cinética: 1 Mm K = mv 2 = G 2 2r e vemos então que em uma órbita circular que está implı́cita aqui, a energia cinética e a energia potencial gravitacional estão relacionadas pela equação: 1 K = − U. 2 Exemplos 1. Um asteróide em rota de colisão com a Terra, tem uma velocidade de 12 km/s em relação ao planeta quando está a uma distância de 10 raios terrestres do centro da Terra. Desprezando os efeitos da atmosfera sobre o asteróide, determine a velocidade vf do asteróide ao atingir a superfı́cie da Terra. Temos que aplicar a conservação de energia neste caso. Assim, temos que: Ki + Ui = Kf + Uf (5.15) GM m 1 GM m 1 mvi2 − = mvf2 − 2 ri 2 rf (5.16) ou seja, e simplificando a massa do asteróide, obtemos ainda: ( vf2 = vi2 + 2GM 1 1 − rf ri ) (5.17) e quando o asteróide atinge a Terra sua distância em relação ao centro da Terra é igual ao raio da Terra. Assim, temos que: vf2 = vi2 2GM + RT ( ) 1 18GM 1− = vi2 + 10 10RT (5.18) portanto, vf2 = vi2 + 9GM 5RT (5.19) e substituindo-se os valores correspondentes segue que: vf2 = (12 × 103 m/s)2 + 9 × 6, 67 × 10−11 m3 /kg.s2 × 5, 98 × 1024 kg 5 × 6, 37 × 106 m vf = 16 km/s. (5.20)
Download