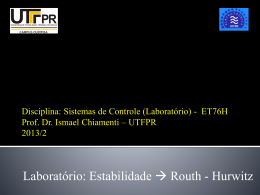
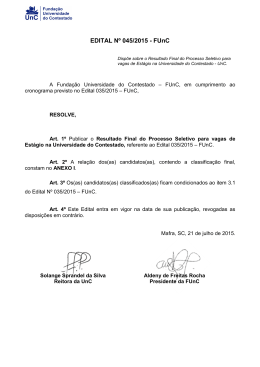
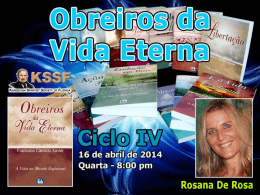
SINAIS E SISTEMAS Propriedades dos SLITs contı́nuos e sua relação com a região de convergência da função de transferência (versão revista da secção 3.3.6 do livro) Viu-se no Capı́tulo 2 que a resposta impulsional h(t) de um sistema contı́nuo causal satisfaz h(t) = 0 , ∀t < 0 . Quando h(t) é de duração infinita, da propriedade 4 da região de convergência da transformada de Laplace, a RC do sinal causal h(t) é a zona do plano s limitada à esquerda pela recta paralela ao eixo imaginário que passa pelo polo de H(s) de maior parte real. Neste caso, quando a expressão algébrica da função de transferência é uma função racional com um número de zeros não superior ao número de polos, é fácil concluir que um SLIT é causal sse a RC da função de transferência fôr uma região do plano s que se estende desde um valor finito de <e(s) até (inclusivé) +∞. × =m(s) 6 ¡ ¡¡ ¡¡ ¡ ¡ ¡¡¡ ¡ ¡¡¡ ¡ ¡ × ¡¡ ¡<e(s) ¡¡¡ ¡ ¡¡¡ ¡ ¡¡ ¡ ¡ ¡¡¡ (a) ¡¡ ¡ ¡ ¡ ¡¡ ¡ ¡¡ ¡× ¡¡ ¡ ¡¡ ¡ ¡¡ ¡ ¡¡ ¡ ¡¡ =m(s) 6 × <e(s) (b) Figure 1: Mapa polos/zeros e possı́veis RCs para H(s) = ¡¡ ¡ ¡ ¡ ¡¡ ¡ ¡¡ ¡ ¡ × ¡× ¡ ¡¡ ¡ ¡¡ ¡ ¡¡ ¡ ¡¡ =m(s) 6 <e(s) (c) 1 correspondendo a (a) (s + 1)(s + 2) sinal direito, (b) sinal esquerdo e (c) sinal bilateral. Por exemplo, considere-se a classe de SLITs cuja expressão algébrica da função de transferência é 1 . H(s) = (s + 1)(s + 2) A esta função de transferência é possı́vel associar as três diferentes RCs representadas na Figura 1. As RCs das Figuras 1-(b) e (c) correspondem a sinais, respectivamente, esquerdo e bilateral. Portanto, não representam sistemas causais. Pelo contrário, a RC da Figura 1-(a) representa um sinal direito. Se se atender a que a expressão algébrica é uma função racional com 2 polos e sem zeros, pode-se concluir que o sinal no tempo é uma combinação linear de exponenciais da forma e−αt u−1 (t), i.e., h(t) é causal. 2 Repare-se que o SLIT não pode ter mais zeros do que polos. De facto, vimos na Secção 3.3.1 que, se a ordem do polinómio do numerador fôr superior à ordem do polinómio do denominador, 1 H(s) torna-se ilimitado quando |s| tende para infinito. Consequentemente, <e(s) = +∞ não pertence à RC pelo que o sistema é não causal. É este o caso, por exemplo, de um diferenciador, i.e., de um sistema cuja relação entrada/ saı́da é d y(t) = x(t) , dt em que x(t) e y(t) representam, respectivamente, os sinais de entrada e de saı́da do sistema. Este SLIT é não causal, pois a determinação da saı́da num dado instante, depende do sinal de entrada na vizinhança desse instante. Da propriedade 6 da transformada de Laplace, tem-se Y (s) = sX(s) RCY ⊇ RCX , i.e., a função de transferência de um diferenciador, H(s) = s plano s, excepto <e(s) = ±∞ . (1) é uma função racional com 1 zero e sem polos. 2 ◦ =m(s) 6 ¡¡¡ ¡ ¡¡ ¡¡ ¡ ¡¡ ¡¡¡¡ ¡¡ ¡ ¡¡¡¡ ¡¡ ¡¡¡ ◦¡ ס¡¡¡¡ ¡¡¡¡ ¡ ¡¡ <e(s) ¡ ¡¡¡ ¡ ¡ ¡ ¡ ¡¡ ¡ ¡ ¡ ¡ ¡ ¡¡¡¡¡¡ Figure 2: Mapa polos/zeros e RC de H(s) = (s + 2)(s − 1) . s+1 Do mesmo modo, o SLIT cujo mapa polos/zeros se representa na Figura 2, embora a sua RC se estenda para a direita de um valor finito de <e(s), é não causal, como se depreende pela existência de um número de zeros superior ao número de polos. Repare-se que este SLIT é equivalente a dois sistemas em paralelo: um diferenciador que, como vimos, é não causal, e um SLIT causal com função de transferência G(s) = − 2 s+1 <e(s) > −1 . 2 Quando h(t) é de duração finita, da propriedade 3 da região de convergência da transformada de Laplace, a RC do sinal causal h(t) é todo o plano s incluindo a recta <e(s) = +∞. Por exemplo, o SLIT com resposta impulsional ½ +∞ ; t0 < 0 −st0 . h(t) = δ(t − t0 ) ←→ H(s) = e plano s, excepto <e(s) = −∞ ; t0 > 0 só é causal quando t0 ≥ 0, i.e., quando o impulso de Dirac que representa a sua resposta impulsional estiver localizado em t ≥ 0. 2 2 Em conclusão, a RC da função de transferência de um SLIT causal ou é todo o plano s, ou a região do plano s limitada à esquerda por um valor finito de <e(s). Em qualquer caso, a RC tem de incluir a recta <e(s) = +∞. A resposta impulsional de um SLIT contı́nuo estável é uma função absolutamente integrável, i.e., Z +∞ |h(t)|dt < ∞ . (2) −∞ Note-se que ¯Z ¯ |H(s)| = ¯¯ +∞ h(t)e −st −∞ ¯ Z ¯ dt¯¯ ≤ +∞ |h(t)|e−<e(s)t dt . −∞ Considerando <e(s) = 0 (s = jω) na desigualdade anterior, a condição (2) permite concluir que para um sistema estável se verifica Z +∞ |H(jω)| ≤ |h(t)|dt < ∞ , −∞ i.e., a transformada de Laplace da resposta impulsional h(t) de um SLIT estável converge sobre o eixo imaginário do plano s, pelo que a RC da função de transferência de um SLIT estável contém o eixo imaginário. A condição anterior é uma condição necessária e suficiente sse o número de zeros da expressão algébrica da função de transferência não fôr superior ao número de polos. Por exemplo, o diferenciador é um SLIT instável pois ao sinal de entrada escalão unitário (sinal limitado) responde com um implulso de Dirac (sinal ilimitado). Embora o eixo imaginário esteja contido na região de convergência da sua função de transferência (ver (1)), o número de zeros é superior ao número de polos. 2 Voltando ao exemplo da Figura 1, o sistema estável corresponde à RC da Figura 1-(a), porque o número de polos não é inferior ao número de zeros. Este já não é o caso do SLIT com o mapa polos/zeros representado na Figura 2, que é instável. 2 Quando H(s) tem um número de polos não inferior ao número de zeros, uma RC limitada (à esquerda ou à direita) pelo eixo imaginário, e em que os polos sobre o eixo imaginário são de multiplicidade simples, a resposta impulsional do SLIT é uma função limitada, pelo que o sistema é criticamente estável. Esta condição é necessária e suficiente para SLITs (de parâmetros concentrados) causais. Por exemplo, o integrador, para o qual 1 <e(s) > 0 , s é um SLIT criticamente estável. Na figura 3-(a) representa-se o mapa polos/zeros do integrador e a respectiva RC. Repare-se que o seu único polo (polo simples) se situa sobre o eixo imaginário. Pelo contrário, o duplo integrador, para o qual h(t) = u−1 (t) ←→ H(s) = h(t) = tu−1 (t) ←→ H(s) = 3 1 s2 <e(s) > 0 , =m(s) 6 ¡ ¡¡ ¡¡¡¡ ¡ ¡ ¡¡ ¡¡¡¡ ¡¡ ¡ ¡¡¡¡ ¡¡ ¡¡¡ ס¡¡¡¡ ¡ ¡¡¡¡ ¡ ¡¡ <e(s) ¡ ¡¡¡ ¡ ¡ ¡ ¡ ¡¡ ¡ ¡ ¡ ¡ ¡ ¡¡¡¡¡¡ =m(s) 6 ¡ ¡¡ ¡¡¡¡ ¡ ¡ ¡¡ ¡¡¡¡ ¡¡ ¡ ¡¡¡¡ ¡¡ ¡¡ × ×¡¡¡¡¡ ¡¡ ¡¡¡¡ ¡ ¡¡ <e(s) ¡ ¡¡¡ ¡ ¡ ¡ ¡ ¡¡ ¡ ¡ ¡ ¡ ¡ ¡¡¡¡¡¡ (a) (b) Figure 3: Mapa polos/zeros e RC do (a) integrador e (b) duplo integrador. é um SLIT instável. Repare-se que o polo na origem é um polo duplo. 2 Em conclusão, um SLIT contı́nuo causal é estável sse todos os polos se situarem no semiplano complexo esquerdo, e é criticamente estável sse todos os polos se situarem no semiplano complexo esquerdo ou sobre o eixo imaginário, mas em que os polos com parte real nula são polos simples. 4
Baixar