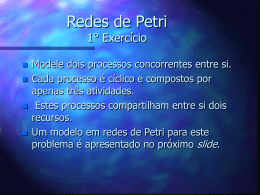
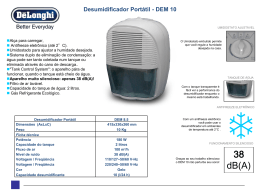
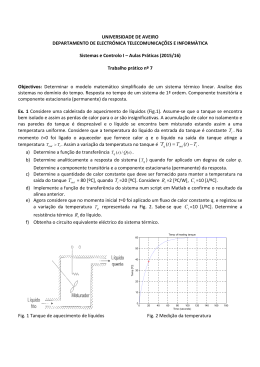
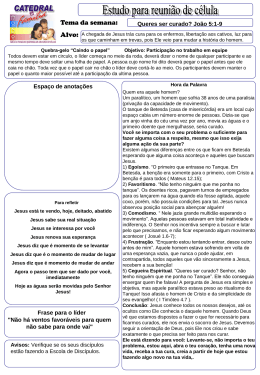
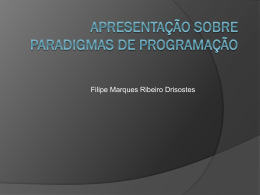
http://dx.doi.org/10.5540/DINCON.2011.001.1.0135 528 REDE DE PETRI NO CONTROLE DE NÍVEL DE UMA PLANTA HART Rafael Martins Preisser Marçal 1, Marlon José do Carmo 2, Ângelo Rocha Oliveira 3 1 [email protected], CEFET-MG Campus III, Leopoldina, Brasil 2 [email protected], CEFET-MG Campus III, Leopoldina, Brasil 3 [email protected], CEFET-MG Campus III, Leopoldina, Brasil Resumo. Apresenta-se neste trabalho a modelagem a eventos discretos por rede de Petri aplicada a uma planta SMAR com protocolo Hart. Para analisar que tal modelagem é factível será aplicada no controle ON-OFF de uma malha de nível. Palavras-chave: Aplicações de Engenharia, Controle de nível, Redes de Petri. 1. INTRODUÇÃO A tecnologia tem produzido em escala cada vez mais crescente sistemas capazes de executarem tarefas de forma repetitiva, quase sem a intervenção humana, sistemas estes denominados de autômatos. A questão do custo e da produtividade levam a um aumento significativo de insumos e pesquisas relacionados à otimização e automação [1]. Contudo, apesar das especificidades de qualquer sistema automatizado, estes possuem eventos iniciais e finais, sendo respectivamente identificados por um sensor e um atuador, por exemplo. Se as mudanças nesses dispositivos ocorrem de forma instantânea, têm-se sistemas a eventos discretos [2]. Os sistemas a eventos discretos são passíveis de modelagem tal como correm em sistemas dinâmicos contínuos. Notadamente em produção computacional utiliza-se a modelagem por equação a diferenças. Contudo, surgiram linguagens e formalismos matemáticos que permitiram a modelar sistemas a eventos discretos de forma mais inteligível e amigável, sendo exemplo as Redes de Petri [3]. As Redes de Petri, embora permitam abordagem simplesmente combinacional, a mesma tem maior ênfase na abordagem sequencial. Na prática esse tipo de processo sequencial e a modelagem em rede de Petri para controle de nível ON-OFF [4] é muito aplicada em processos de produção por batelada [5]. Nesse tipo de processo, o produto é produzido em etapas, ou seja, em uma fábrica com o produto fluídico e vários tanques, os lotes de volumes determinados do produto vão caminhando de tanque em tanque e sendo processado – misturado, aquecido, etc. A estruturação previa da lógica de sequenciamento usando a rede de Petri é importante para evitar surpresas e conflitos em momentos inesperados. No controle binário de nível em um tanque, a banda de operação, entre as ações liga e desliga é intencionalmente feita grande de modo a minimizar a frequência de operação do equipamento, podendo ser esse um motor, uma bomba ou uma válvula. À medida que se necessita reduzir esse range entre o nível máximo e mínimo, surge então a necessidade do controle proporcional, que tem a capacidade de encontrar uma vazão constante intermediária que consiga manter o nível estabilizado no valor ajustado pelo operador. O CEFET-MG campus III possui uma planta com controle de várias variáveis, dentre elas, nível. As instituições de ensino que utilizam plantas industriais têm dado enfoque no ensino de controle, sobretudo no projeto de controladores e a modelagem a eventos discretos é fomentado de forma bastante teórica. Portanto, surgiu a necessidade de que aplicasse de forma mais prática o formalismo da rede de Petri em uma planta SMAR que opera com protocolo Hart, utilizando um controle simples ON-OFF. O Trabalho está dividido da seguinte forma: Na seção dois discute-se a metodologia empregada; na seção três apresentam-se os resultados e na seção quatro conclui-se este trabalho. 2. METODOLOGIA A modelagem a eventos discretos será aplicada em uma planta SMAR com protocolo Hart, conforme Fig.1. Fig. 1. Planta didática SMAR O protocolo HART (Highway Adressable Remote Transducer) é um protocolo de comunicação desenvolvido pela Fisher Rosemount na década de 80 para facilitar a comunicação com instrumentos de campo inteligentes [6]. Há muitos anos, o padrão de comunicação utilizado pelos instrumentos de campo tem sido o sinal analógico de corrente. Na maioria das aplicações, o sinal de corrente varia 529 REDE DE PETRI NO CONTROLE DE NÍVEL DE UMA PLANTA HART Rafael Martins Preisser Marçal , Marlon José do Carmo, Ângelo Rocha Oliveira entre 4 a 20mA, sendo proporcional à variável de processo que está sendo representada. Com a disseminação de instrumentos inteligentes (microprocessados) veio a necessidade de parametrizações e a disponibilidade de informações adicionais. Para tal função utiliza-se o protocolo de comunicação HART que permite que a informação principal seja transmitida pelo sinal de 420mA e parâmetros de configuração e diagnóstico ou informações adicionais sejam transmitidos digitalmente. Para a planta acima será utilizado o controle ligadesliga de nível de água em um tanque. Se o nível está baixo, o controlador abre totalmente a válvula de entrada; se o nível está alto, o controlador fecha totalmente. Não há vazão intermediária, sendo o seu valor 0 ou 100%. O processo consiste basicamente de dois tanques, sendo um de reservatório e um tanque de aquecimento (onde o nível será controlado); uma bomba de partida direta BBA01; três válvulas ON-OF V-1, V-4 e V-8 e um transmissor de nível LT01. Os demais instrumentos presentes no fluxograma, apresentado na Fig. 2, não serão utilizados nesse processo e as demais válvulas estarão fechadas, como condição inicial. A descrição desse processo consiste basicamente em ligar a bomba de água sempre que o tanque de aquecimento estiver acusando nível baixo, e desligar sempre que o tanque chegar a um nível alto. Para que essas ações ocorram de maneira desejada, é necessário antes de ligar a bomba para encher o tanque verificar se há água no tanque de reservatório e também garantir que as válvulas 1 e 4 estejam abertas e a V-8 fechada. Pode se perceber na Fig. 2, destacado de vermelho o caminho de entrada da água no tanque de aquecimento e na cor azul, o caminho de saída da água. Para finalizar a descrição do processo, como o medidor de nível é um instrumento de leitura analógica, para implementação de um sistema discreto foi necessário usar uma lógica de comparação para transformar esse valor continuo em dois valores discreto, ou seja, uma variável representando o nível máximo e outra representando o nível mínimo no tanque de aquecimento. Como o transmissor de nível usa a tecnologia de transmissão de sinal em uma escala de 4 a 20 mA / HART, sendo que essa faixa de valores é vista como uma faixa de números inteiros dentro do Software que varia de 0 a 10.000, para ajustar a variável discreta de valor mínimo usou se a função matemática que comparasse se o valor vindo do sensor era menor do que o valor 50, estipulado anteriormente como nível baixo (Fig. 3). Em caso afirmativo, será automaticamente ativada a variável discreta de nível mínimo. Em caso contrario, ou seja, nível alto será comparado se o valor de leitura do sensor é maior do que o valor 9950, ativando a variável de nível Máximo (Fig. 4). O sistema foi então implementado em um controlador CLP da Smar CONF700 e para isso usou se a linguagem Ladder, em acordo com a norma IEC 61131-3 [7]. Antes disso, foi então desenvolvida uma rede de Petri para estruturar a programação e verificar a existência de inconsistências. Para desenvolvimento da rede de Petri, foi utilizado o Visual Object Net [8]. Fig. 3 Bloco Funcional de comparação se <= Fig. 4 Bloco Funcional de comparação se >= 2.2 A rede de Petri Fig. 2. Parte do Fluxograma da Planta Didática 2.1 Tecnologia envolvida no processo O estado do sistema é dado pela repartição de token nos lugares da rede de Petri, cada lugar representando um estado parcial do sistema. A cada evento que ocorre no sistema, é associada uma transição no modelo de rede de Petri. A ocorrência de um evento no sistema é representada, no modelo, pelo disparo da transição ao qual este está associado. 530 Os elementos básicos que permitem a definição de uma RP são os seguintes: - Posição (representado por um circulo): pode ser interpretado condição, um estado parcial, uma espera, um conjunto de recursos, etc. No processo de controle ON-OFF desenvolvido, representamos por um lugar bomba, válvulas e o estado dos tanques. - Transição (representada por um retângulo): é associada a um evento que ocorre no sistema, como o evento ligar, desligar, nível alto e baixo no tanque de aquecimento e o nível alto no tanque de reservatório. - Token (representada por um ponto em uma posição): É um indicador indicando que a condição associada ao lugar é verificada. Quando está passa pelos lugares, indica bomba ligada, válvula aberta e tanques cheios. Para utilização das variáveis indicadoras de nível nas transições será necessário o uso do arco inibidor, sendo que a rede só pode seguir quando tiver uma ficha no estado que representa essas variáveis. Segue a especificação formal em CCS [3] do processo representado na rede de Petri apresentada na Fig. 5: PROCESSO = LIGA. COMPLEMENTAR. REDELIGADA. (( LIL. TANQVAZIO. LHS. TANQRESCHEIO. V1. V4. BBA01. LIH. V8. LIL) + DESLIGA). PROCESSO 3. RESULTADOS E DISCUSSÕES No Final deste trabalho, será apresentada a rede de petri. Para inicializar a rede, é necessário previamente conferir se existe um Token no lugar nomeado de complementar. Estando essa condição satisfeita, para iniciar o ciclo é necessário colocar uma ficha no local LIGA. A transição t7 será então satisfeita e a fica vai passar para o local REDE LIGADA. Quando a ficha estiver nesse lugar, ela então irá seguir para o processo se o arco inibidor LIL (nível baixo no tanque aquecimento) estiver com um Token. Caso tenha algum Token no lugar DESLIGA, ai então a ficha q está em REDE LIGADA irá voltar para o lugar COMPLEMENTAR e a partir desse momento o sistema estará pronto para partir novamente, caso tenha outra ficha no lugar “LIGA”. Voltando a situação que o Token seguiu para o processo após satisfazer a transição t1, o Token vai para o local TANQUE VAZIO e a transição t2 será habilitada quando estiver uma ficha no local LHS (nível alto no tanque de reservatório), passando a ficha para o lugar TANQUE RESERVATORIO CHEIO. Nesse momento será habilitada a transição t3 e habilitara ao mesmo tempo a posição V-1, V-4 e a BBA01, até que o tanque se encha, ou seja, ate ativar o lugar LIH. A partir desse momento, a bomba será desligada com a passagem do Token e a válvula 8 será aberta, representado pelo lugar V-8, e ficara assim ate que o tanque esvazie e ative o lugar LIL. Então, a ficha voltará para o lugar REDE LIGADA e o processo será reiniciado ou então desligado. 3.1 Especificação em CCS Fig.5 . Modelagem por Rede de Petri 531 REDE DE PETRI NO CONTROLE DE NÍVEL DE UMA PLANTA HART Rafael Martins Preisser Marçal , Marlon José do Carmo, Ângelo Rocha Oliveira 4. CONCLUSÕES Foi apresentada neste trabalho uma aplicação da modelagem de sistemas a eventos discretos por Rede de Petri. Para demonstrar a aplicação utilizou-se uma planta didática SMAR com protocolo Hart, mostrando que é factível o ensino de modelagem a eventos discretos de forma mais prática e aplicada. AGRADECIMENTOS Os autores gostariam de agradecer o CEFET-MG pelo apoio na execução deste trabalho. 5. REFERÊNCIAS BIBLIOGRÁFICAS [1] Ribeiro, Marco Antonio. Aplicações de Automações. Editora Tek, 2005. [2] Costa, E. M. M. Introdução aos Sistemas a Eventos Discretos e à Teoria de Controle Supervisório. Editora alta Books, 2005. [3] Plínio. C. Engenharia de Automação Industrial. Editora, LTC, 2001. [4] Ogata, K. Engenharia de controle moderno. Editora Prentice Hall, 2001. [5] Ramos, A. W. CEP para processos contínuos e em batelada. Editora Edgard Blücher, 2000. [6] Verha, A. P, L. Foundation Fieldbus. ISA books, 2000. [7] Filho, J. A. B. Benefícios da norma IEC61131-3 aplicada a CLP’s. Intech - ISA, 2000. [8] Jr, Alberto D. Aprendendo Visual Objects. Editora Érica, 1998.
Baixar