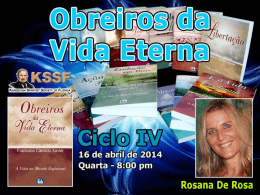
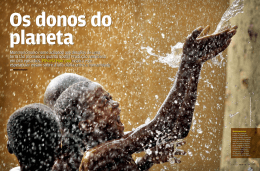
ISSN 2317-3300 Estudo analı́tico e computacional de um modelo matemático de circuito elétrico envolvendo um memristor Marluce da Cruz Scarabello ∗, Marcelo Messias, Departamento de Matemática, Estatı́stica e Computação, FCT, UNESP, 19060-900, Presidente Prudente, SP E-mail: [email protected], [email protected]. Palavras-chave: Matemática Aplicada à Fı́sica, Memristor, Oscilações Não-Lineares, Circuitos elétricos. Resumo: Neste trabalho fazemos um estudo analı́tico e computacional do modelo matemático de um circuito formado por um indutor, um capacitor, um resistor e um memristor. O memristor, abreviação para “memory resistor”, é um componente eletrônico fundamental, cuja existência foi postulada pelo engenheiro Leon O. Chua em 1971 [3], porém sua implementação fı́sica foi conseguida somente em 2008, por um grupo de pesquisadores da Hewllet-Packard Company (HP) [1]. O modelo aqui estudado é dado por um sistema de três equações diferenciais ordinárias lineares por partes, e dependente de 5 parâmetros. Foi proposto em [2] e estudado em detalhes em [4]. Neste trabalho consideramos os casos não tratados no estudo apresentado em [4], completando assim a análise ali desenvolvida. 1 Introdução Em 2008 cientistas da Hewllet-Packard Company anunciaram a construção de um novo componente eletrônico fundamental - o memristor [1]. A existência teórica deste componente foi prevista por Leon Chua em 1971 [3], baseado em propriedades de simetria de certos circuitos elétricos, no entanto até então sua existência fı́sica não havia sido comprovada. O memristor é considerado o quarto componente eletrônico fundamental - ao lado do resistor, do capacitor e do indutor - porque possui propriedades que não podem ser duplicadas por nenhuma combinação dos três outros componentes. O grupo de pesquisadores da HP conseguiu desenvolver um protótipo em nanoescala, cujas propriedades comprovam ser as do memristor teorizado por Chua. O estudo de circuitos elétricos envolvendo memristores atraiu grande interesse depois da sua construção fı́sica, devido ao grande potencial de aplicações deste componente, principalmente na construção de circuitos eletrônicos que devem integrar a nova geração de computadores e memórias (internas e externas). 2 Oscilador Linear por Partes Envolvendo o Memristor Conforme [2] o memristor é caracterizado por uma relação funcional não-linear entre a voltagem v e a corrente i, dadas por v = M (q)i e i = W (ϕ)v. (1) Aluna do Programa de Mestrado em Matemática Aplicada e Computacional - pósMAC - FCT/UNESP. Bolsista FAPESP ∗ 365 ISSN 2317-3300 Rt Rt onde q , −∞ i(t)dt e ϕ , −∞ v(t)dt. As funções M (q) e W (ϕ) são chamadas de memristência e memdutância e definidas por: M (q) = dϕ(q) ≥0 dq e W (ϕ) = dq(ϕ) ≥ 0. dϕ Neste trabalho consideramos um oscilador linear por partes envolvendo um memristor, obtido com base no Circuito Canônico de Chua (Figura 1(a)), substituindo-se o Diodo de Chua por um memristor de fluxo controlado e removendo-se um capacitor (para detalhes ver [2, 4]). Obtemos com isso o circuito mostrado na Figura 1(b). Como o memristor é caracterizado pela seguinte função linear por partes q(ϕ) = bϕ + 0.5(a − b)(|ϕ + 1| − |ϕ − 1|), onde a, b > 0, obtemos a memdutância W (ϕ) dada por: dq(ϕ) a, se |ϕ| < 1, W (ϕ) = = b, se |ϕ| > 1, dϕ (2) (3) Aplicando as Leis de Kirchhoff ao circuito da Figura 1(b) obtemos o sistema de equações (a) (b) Figura 1: (a) Oscilador Canônico de Chua. (b) Oscilador de terceira ordem com um memristor de fluxo controlado. Fonte: referência [4]. diferenciais de terceira ordem, linear por partes, e dependendo de cinco parâmetros, dado abaixo (para detalhes, ver [2, 4]) ẋ = α(y − W (z)x), ẏ = −ξx + βy, (4) ż = x, onde W (z) = a, se |z| < 1, b, se |z| > 1, e as novas variáveis e parâmetros se relacionam com as quantidades fı́sicas do sistema da seguinte forma: x = v1 , y = i3 , z = ϕ, α = 1/C1 , ξ = 1/L e β = R/L, onde {(α, β, ξ, a, b) ∈ R5 | α, β, ξ, a, b > 0}. 3 Análise Linear do Sistema (4) Uma conta simples mostra que os pontos de equilı́brio do sistema (4) são dados por {(x, y, z) ∈ R3 | x = y = 0 e z ∈ R} , logo o sistema possui uma linha de equilı́brios contida no eixo-z. Como calculado em [4] a matriz Jacobiana J do sistema (4) aplicada no ponto de equilı́brio (0, 0, z) é dada por −αW (z) α 0 J = −ξ β 0 (5) 1 0 0 366 ISSN 2317-3300 que tem como autovalores λ1 = 0 e λ2,3 √ τ± ∆ = , 2 onde τ = β − αW (z), ∆ = τ 2 − 4D e D = α(ξ − βW (z)). Os autovetores correspondentes são v1 = (0, 0, 1), ! √ √ τ − ∆ β 2 + βαW (z) − 2αξ − β ∆ , ,1 (6) v2 = 2 2α e v3 = ! √ √ τ + ∆ β 2 + βαW (z) − 2αξ + β ∆ , ,1 . 2 2α (7) Em [4], Teorema 2.1, é sintetizado o estudo da estabilidade local dos pontos de equilı́brio (0, 0, z) do sistema (4) com 0 < a < b e com os parâmetros α, β e ξ positivos. No entanto, nos casos em que os autores consideraram ∆ > 0 se |z| < 1 e ∆ < 0 se |z| > 1 (casos (e), (f), (m), (n), (u) e (v) da Tabela 1 de [4]), as hipóteses são impossı́veis de serem verificadas. Tais casos são possı́veis somente se considerarmos 0 < b < a em vez de 0 < a < b. De fato, para |z| < 1 temos ∆ = (β + αa)2 − 4ξα > 0 =⇒ (β + αa)2 > 4ξα, (8) ∆ = (β + αb)2 − 4ξα < 0 =⇒ (β + αb)2 < 4ξα. (9) e para |z| > 1 temos De (8) e (9) segue que (β + αb)2 < 4ξα < (β + αa)2 , donde obtemos, necessariamente, que b < a. Assim, visando completar o estudo apresentado em [4], fizemos uma análise da estabilidade local dos equilı́brios (0, 0, z) no caso 0 < b < a. Os resultados obtidos estão descritos na Tabela 1. Indicamos cada caso com a mesma letra usada em [4] para facilitar a comparação. Condições em τ τ <0 β < W (z) α τ >0 β > W (z) α τ muda de sinal de acordo com z β b< <a α Condições em ∆ ∆ > 0 e D < 0 se |z| < 1 ∆<0 (e) Nó estável Foco Estável (f) Sela Foco Instável (m) Nó Instável Foco Instável (n) Sela Foco Instável (u) Nó Estável Foco Instável (v) se |z| > 1 ∆ > 0 e D > 0 se |z| < 1 ∆ < 0 se |z| > 1 ∆ > 0 e D < 0 se |z| < 1 ∆ < 0 se |z| > 1 ∆ > 0 e D > 0 se |z| < 1 ∆<0 Casos se |z| > 1 ∆ > 0 e D > 0 se |z| < 1 ∆ < 0 se |z| > 1 ∆ > 0 e D < 0 se |z| < 1 ∆<0 Estabilidade Local de (0, 0, z) |z| < 1 |z| > 1 Sela Foco Estável se |z| > 1 Tabela 1: Estabilidade local dos pontos de equilı́brio (0, 0, z). 4 Simulações Numéricas Desenvolvemos um estudo numérico de cada um dos casos apresentados na Tabela 1. O mais interessante, que apresentamos nesta seção, é o caso (v), para o qual ocorrem oscilações periódicas 367 ISSN 2317-3300 para o sistema (4). Neste caso o equilı́brio (0, 0, z) é um nó estável para |z| < 1 e um foco instável para |z| > 1. Para tal estudo, tomemos os parâmetros a = 5, b = 2, α = 2, β = 6 e ξ = 31. Resolvendo o sistema (4) com o método de Runge-Kutta de quarta ordem e passo 0.001, obtivemos as soluções mostradas na Figura 2. As condições iniciais utilizadas foram pontos pertencentes às retas geradas pelos autovetores v2 e v3 associados ao nó estável. Podemos observar que ocorre mudança de estabilidade local do ponto de equilı́brio quando z atravessa os pontos de descontinuidade do sistema (4), |z| = ±1. Essa mudança na estabilidade dos pontos gera as oscilações periódicas (instáveis). (a) (b) (c) Figura 2: (a,b) Solução do sistema (4) com a = 5, b = 2, α = 2, β = 6 e ξ = 31, com tempo de integração [−8, −6]. Observa-se a existência de uma órbita periódica instável ao redor do eixo-z. (c) Solução mostrada em (a,b) com tempo de integração estendido para [-8,2], mostrando o nó atrator. 5 Considerações Finais Neste trabalho analisamos o modelo matemático de um circuito elétrico envolvendo um memristor, dado por um sistema de três equações diferenciais ordinárias lineares por partes dependendo de cinco parâmetros. O sistema tem uma linha de pontos de equilı́brio contida no eixo-z, a estabilidade local destes equilı́brios foi analisada em razão dos valores dos parâmetros. Estudamos o caso em que na zona interna obtemos nó estável e nas zonas externas focos instáveis. Esta mudança de estabilidade local do ponto de equilı́brio ocorre quando z atravessa os pontos de descontinuidade do sistema (4), e podem gerar oscilações periódicas, como as obtidas numericamente no caso (v) (Figura 2(a) e 2(b)). Trata-se de um fenômeno dinâmico não-linear, que poderia ser visto como uma “bifurcação sem variação de parâmetros”, associado ao circuito envolvendo um memristor (ver também [4]). Referências [1] D. B. Strukov, G. S. Snider, G. R. Stewart and R.S. Williams, “The missing memristor found”, Nature 453, May 2008, pp. 80–83. [2] Itoh, M. and Chua, L. O. “Memristor oscillators”, Internat. J. Bifur. Chaos Appl. Sci. Engrg., Vol. 18, (2008) pp. 3183-3206. [3] L. O. Chua, “Memristor – the missing circuit element”, IEEE Trans. Circuit Th. 18 (1971), pp. 507–519. [4] M. Messias, C. Nespoli and V. A. Botta, “Hopf Bifurcation From Lines of Equilibria without parameters in Memristor Oscillators”, em Internat. J. Bifur. Chaos Appl. Sci. Engrg., Vol. 20, No. 2 (2010), pp. 437-450. 368
Baixar