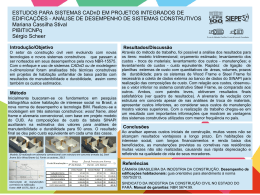
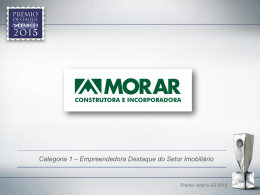
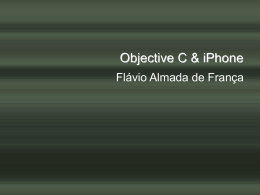
Sistema Programável de Telemetria e Telecomando (SPTT) Engº Alcemy da C. Silva, Luis Paulo S. Olyntho e Sandro C. Ribeiro, Prof. Engº Marcos Capatto Sistema de telemetria e telecomando,Curso de Engenharia Elétrica/Eletrônica, Faculdade de Engenharia de Resende, Associação Educacional Don Bosco (AEDB) CEP:27511-971-Estrada Resende Riachuelo, nº 2535, Campo de Aviação,Resende-RJ, BRASIL http://www.aedb.com.br Resumo: Estão bem evidentes atualmente, os benefícios da automação e sua aplicação é cada vez mais solicitada, mesmo fora do ambiente industrial. A produção em larga escala, de controladores lógicos programáveis versáteis com capacidade de receber e enviar sinais analógicos e/ou digitais diretamente de suas interfaces de entrada e saída, o estabelecimento de diversos padrões de interfaces de comunicação digital, a consolidação do conceito das redes de dados e sistemas de telecomunicação, tornaram possível o desenvolvimento de projetos de rede de automação com as mais variadas características e os mais diversos propósitos. Este trabalho visa implementar um sistema de automação, operado remotamente, baseado em micro-controladores, desenvolvido para supervisionar equipamentos de transmissão de TV de uma Geradora de Televisão, através de uma rede de comunicação de dados privada, de longa distância, utilizando software supervisório desenvolvido especialmente para este fim. ABSTRACT: It’s more and more clear nawadays the benefits of automation and its aplication, even out of the factory environment. A large scale production of the programmable logic controllers with the capacity to receive and to send analog and digital signals straightly from its input/output interface, the standardization of several digital communication interface patterns, the consolidation of the concept about data network and telecommunication systems, have made possible the development of some projects of automation with the most various features for the most different purpose. This work intend to project an automation system based on micro controller, developed to control transmission equipments of a Television Station with remote supervision through a long distance private data communication network using supervisory software especially developed for this purpose. Keywords: Frame de aquisição, frame de dados, frame de comando, supervisório, unidade terminal remota 1- Introdução A proposta do SPTT é criar um sistema remoto de automação inteligente que, monitore e meça diversos tipos de eventos ou grandezas físicas que possam ser 1 traduzidos em sinais elétricos, e que, baseado nos estados ou medidas desses eventos ou grandezas físicas, seja capaz de acionar, dispositivos e operar equipamentos, de forma programada e em tempo real, utilizando-se de atuadores eletrônicos e eletromecânicos. Alem de monitorar e medir, o sistema também deverá ser capaz de transmitir relatórios periódicos de todos os eventos e grandezas monitorados a uma central de controle conectada on-line, e permitir que através de uma adequada interface homem máquina, um operador humano também possa acionar ou operar a distância os equipamentos remotos conectados ao sistema de automação. Um outro aspecto de grande importância para este projeto é que as industrias tradicionalmente tem seus parques tecnológicos de produção, instalados em uma mesma área geográfica, o que é um facilitador na implementação do sistema de automação, outras empresas, no entanto, que tem seus modelos de negocio montados sobre parques tecnológicos que estão distribuídos geograficamente e, terão a distância entre esses parques como elemento que dificulta a automação, como é o caso das Emissoras de Radio, Emissoras de Televisão, empresas de telefonia, provedores de banda larga, distribuidoras de energia elétrica, etc. para solucionar esse problema utilizaremos os conceitos de redes de computadores que há décadas tinham suas aplicações restritas basicamente ao ambiente corporativo. Um esquema básico do sistema pede ser visto na figura 1. 2 – Interface de Aplicação (RTU) 1-Sensores e atuadores que monitoram, controlam ou medem algum tipo de atividade localmente 2-Interface de Aplicação interface entre os sensores e a rede de comunicação. Para aplicações remotas refere-se à unidade terminal remota (RTU) 3-Base de Comunicação sistema de radiomodem que transmite informações dos sensores através de interface de aplicação para um computador central 4-Central de Controle Sistema central inteligente que reúne os dados da interface de aplicação, emite relatórios e toma decissões de comandar outros dispositivos V Sensor Logico V C P U Sensor POT Sensor Analogi TX 1 Radio Mode m V CH ON/OF BAT Rede de comunicação de Dados – via Radio Modem AC ON/OFF Sensor TEMPE Atuado r 3- Base Comunicação C P U Porta ON/OFF Sensor Logico Sensor Analogi Radio Modem 4 - µComput Central de controle 1 - Sensores e atuadores TX 1 CH ON/OF Atuado r BAT Idem anterior Radi Mode 2 V Fig 1 – Esquema básico do SPTT 2- Aquisição de dados e acionamento remotos A unidade terminal remota (RTU) foi definida a partir da necessidade de realizar as principais atividades antes executadas manualmente por um operador dos transmissores de TV em relação ao sistema de transmissão sob os seus cuidados, o que podemos definir como controle de processo, as quais são: comutar o transmissor principal pelo reserva quando: aquele apresentar funcionamento inadequado, o fornecimento de energia da concessionária for interrompido, a temperatura da sala dos transmissores for maior que 30º Celsius, alem de fazer a vigilância patrimonial evitando a invasão de intrusos. Alem de realizar esse procedimento, o operador tinha a incumbência de periodicamente registrar em relatório apropriado os principais parâmetros relacionados ao transmissor e reportá-los via radio comunicação de voz para central de controle na sede da Emissora de TV independente de haver ou não alguma ocorrência de mau funcionamento do sistema de transmissão. Esse canal de comunicação de voz era bidirecional para possibilitar intervenção remota do técnico especialista locado na sede orientando via radio o operador de TX quando houvesse uma irregularidade fora do seu campo de conhecimento. O desenho básico da RTU, que representa as condições acima é mostrado na figura 2. Máquinas e processos monitorados: Temp. Sala Potencia. TX1 Ausência AC Porta aberta Estado TX2 Variáveis de entrada Sensores de estado e lineares Variáveis de controle entrada Controlador Programável (PIC) Comunicação Remota Máquinas e processos controlados: Liga/desl TX1 Liga/desl.TX 2 Atuadores e sinalizadores Variáveis de saída Variáveis de controle de saida RTU Figura 2 – Desenho básico da RTU Alem de realizar esse procedimento, o operador tinha a incumbência de periodicamente registrar em relatório apropriado os principais parâmetros relacionados ao transmissor e reportá-los via radio comunicação de voz para 3 central de controle na sede da Emissora de TV independente de haver ou não alguma ocorrência de mau funcionamento do sistema de transmissão. Esse canal de comunicação de voz era bidirecional para possibilitar intervenção remota do técnico especialista locado na sede orientando via radio o operador de TX quando houvesse uma irregularidade fora do seu campo de conhecimento. O desenho básico da RTU, que representa as condições acima é mostrado na figura 1. O controle de processo realizado apenas pela RTU pode ser definido como controle de malha fechada uma vez que a variável de entrada influirá na variável de saída, cabendo ao operador da Central do Supervisório manter ou não a decisão da RTU, transformando assim o processo em controle de aprendizado conforme vimos na Introdução. As operações descritas acima apresentam requisitos que demandam operação em tempo real dentro do site de transmissão, como é o caso da percepção de falha do TX principal, abertura de porta, temperatura elevada e subseqüente comutação para o TX Reserva e on-line na comunicação com a central. As informações analógicas convertidas em dados são de baixa magnitude, podendo ser representados com precisão por uma palavra de oito bits, como é o caso da monitoração da potencia direta do transmissor e da temperatura da sala dos transmissores. Devido a esses fatos escolhemos um microcontrolador programável do tipo PIC para ser o coração da nossa unidade terminal remota em função da sua versatilidade e de ter o menor custo beneficio para os requisitos solicitados, se comparados aos similares PLC ou Microprocessador. 3- Central de comando A Central de comando foi conceituada como o conjunto de programas gerados e configurados no software básico de supervisão, implementando as estratégias de controle e supervisão com telas gráficas de interfaceamento homem-máquina que facilitam a visualização do contexto atual, a aquisição e o tratamento de dados do processo e a gerencia de relatórios e alarmes. Como a RTU trabalha em local remoto sem assistência humana esta não necessita de IHM (interface homem máquina), que é implementada apenas na Central de comando que precisa armazenar e apresentar os dados recebidos de forma o mais amigável possível de maneira que as informações do relatório sejam facilmente interpretadas permitindo uma atuação mais rápida do operador do supervisório nos casos de irregularidades no site de transmissão apontados pela unidade terminal remota. Como descrito no capítulo 2, a unidade terminal remota tem inteligência limitada definida pela programação implementada no microcontrolador e é capaz de tomar as decisões mais crucias para a manutenção da operacionalidade do sistema de transmissão. No entanto é o operador do supervisório que supervisionará as ações da RTU, normalizando através da Central de Supervisão a operação dos transmissores e acionará a equipe de manutenção quando necessário. Para atender a esses requisitos definimos como base de hardware da Central do Supervisório um microcomputador Desktop de baixo custo como a seguinte configuração: 4 • • • • • • • Processador K6 II Clock 350 MHz 64 MB de memória RAM Disco Rígido IDE de 4 Gb Placa de interface serial EIA-232 Monitor de 14 pol Drive 3 ½ O software supervisório será escrito para realizar as tarefas relacionadas nos capítulos 2 e 3 e desenvolvido em linguagem Delphi 6 através do hiperterminal e gravada no disco rígido do Desktop, e apresentará a tela do protótipo da figura 3. (1) (2) (4) (5) (3) Figura 3 – Protótipo da Tela da Central do Supervisório. A tela principal do supervisório mostra: 1– Simultaneamente todas as RTU com os respectivos relatórios de dados que é atualizado a cada interrogação da rede. 5 2– Campo do status de comunicação indicando a taxa de erro na transmissão de cada RTU, se há comunicação e qual a data/horário da última comunicação realizada. 3– Campo para visualização de alarme caso alguma RTU relate alguma irregularidade. 4Campo dedicado a mostrar o status da porta serial do DTE mestre 5– Lista de comandos durante a execução do programa. 4- Rede de comunicação de dados A interconexão entre a Central de Supervisão e Unidades Terminais Remotas ocorrerá através dos enlaces de rádios digitais que configuram por si só uma rede de comunicação de dados. Como as distâncias envolvidas entre cada terminal, é grande, e até mesmo abrange diversas cidades, podemos classificá-la como uma rede privada do tipo WAN (Wide Área Network). E pelas mesmas razões o meio físico escolhido para transmissão foi o ar e o transceptor, um rádio modem. Um modem, denominado genericamente como DCE – Equipamento de Comunicação de Dados tem uma interface para o meio físico e uma para o processador gerador da mensagem, genericamente chamado de DTE – Equipamento Terminal de Dados, como mostra a figura 4. A interface utilizada entre o DTE e o DCE exige que certos procedimentos (chamados de protocolos) sejam observados ao se estabelecerem comunicação entre as duas extremidades, de acordo com Helder (1999). Na forma como utilizaremos, primeiro, o DTE e o modem da extremidade transmissora devem estabelecer comunicação um com o outro. O DTE indica ao modem que quer transmitir, e após esse modem sinalizar que está pronto o dá-se início a transmissão da mensagem. O modem receptor tem de entrar em contato com o seu DTE para verificar se este está pronto a receber e após confirmação transfere a mensagem recebida ao seu DTE. Cabo da interface EIA-232 Meio Físico DTE DCE modem DCE DTE modem DCE DTE modem Figura 4 - Link Multiponto com interface EIA-232 6 No software de aplicação os dados serão encapsulados em três tipos de frame de mensagem, o frame de requisição de dados, frame de dados e o frame de comando. Estes frames serão codificados na camada de apresentação e cada dado do byte básico será representado por um caractere do código ASCI II conforme mostram a figura 5 O frame de requisição de dados será construído com 6 campos perfazendo um total de 15 bytes. Como cada byte possui 11 bits este frame terá um total de 165 bits com a estrutura mostrada na figura 6. Os bytes dos campos Pré Sincronismo, Start of Frame, End of Frame e Pós Sincronismo tem estrutura fixa e deverão apresentar sempre os mesmos caracteres. O byte do campo Adress indicará a qual DTE remoto pertence o endereço da mensagem de dados enviada ao mestre. Pode assumir os seguintes valores: A para RTU A B para RTU B O byte do campo Tipo de Frame indicará que tipo de dado está sendo enviado para a DTE do supervisório: O 1º byte informa o status da porta do site nível lógico “0” porta aberta e “1” porta fechada O 2º byte informa o status do TX2 nível lógico “0” TX ligado e “1” TX desligado nível O 3º byte informa o status do fornecimento de energia elétrica lógico “0” AC presente e “1” AC ausente O 4º byte informa o nível de potencia do TX1 pode variar de 00 a FF representando tensões analógicas entre 0 e 5V com 256 níveis distintos com precisão de (5 V/256) 0,02V. O 5º byte informa o nível de temperatura na sala do TX pode variar entre 00 e FF representando variações de temperatura com precisão de 0,02ºC. 1 8 bits bit Dados Start 1 bit 1 bit Pari-dade Stop Figura 5 – Byte básico EIA-232 F F Pré Sincronismo F T V R Start of Frame S ? Adress / E N D Tipo End of Frame Frame Requis F F F Pós Sincronismo Figura 6 – Frame de Requisição de Dados 7 F F F T Pré Sincronismo V R S Start of Frame ? Adress ? E N D F Tipo End of Frame Frame Comand F F Pós Sincronismo Figura 7 – Frame de Comando F F F Pré Sincronismo T V Start of Frame R S ? Adress ? ? ? ? ? Tipo de Frame Dados E N D End of Frame F F F Pós Sincronismo Figura 8 – Frame de Dados A taxa de transferência de dados será configurada na USART embutida no PIC e na placa do PC K6 II para velocidades da ordem de 57 Kbps ou mais, porem neste projeto, esta taxa será limitada a 9600 bps, em função das características do rádio modem que possui taxa de dados máxima de 9600 bps para um canal de 12,5 Khz no modo half-duplex. Visto que um frame de requisição possui 165 bits e um frame de dados, 209 bits e o RTS/CTS delay do rádio modem é 30 ms. Dividindo o número de bits do frame pela taxa de dados teremos um frame de requisição com 17,2 ms e um frame de dados com 21,8 ms. O tempo de transmissão do frame de requisição Tr será então: Tr = Tfr + Tdelay Tr = (17,2 + 30) ms Tr = 47,2 ms Td = 51,8 ms Onde: Tfd é oTempo do frame de dados Tdelay é o tempo de atraso entre a ativação do RTS e a resposta do CTS O tempo total de requisição pela Central e retorno do dado pela unidade remota será: Trr = Td + Tr Tr = (47,2 + 51,8) ms Tr = 99,0 ms Com esse tempo de resposta seria possível interrogar e ler a resposta de até 10 unidades remotas em um segundo, o que torna a taxa de dados de 9600 bps adequada e suficiente para este projeto. 8 Onde: Tfr é oTempo do frame de requisição Tdelay é o tempo de atraso entre a ativação do RTS e a resposta do CTS 5 – Conclusão A apresentação do protótipo descrito neste artigo, limita as unidades terminais remotas em apenas duas, e que por sua vez monitoram cada uma, apenas duas grandezas analógicas (temperatura e potência do TX1) e três grandezas de estado (TX2 ligado/desligado, porta fechada/aberta e energia elétrica presente/ausente), com acionamento de apenas dois transmissores de TV, teve o caráter didático de demonstrar as potencialidades do projeto e tornar factível a demonstração de sua funcionalidade no ambiente simulado de laboratório. A implementação do projeto, no ambiente real para o qual ele foi proposto, permitirá utilização de todos os recursos do sistema tais como: de 10 da 15 unidades terminais remotas, onde cada uma poderá monitorar até 8 grandezas analógicas, 12 eventos de estado e acionar até 12 dispositivos ou equipamentos diferentes, sem grandes alterações no projeto. Verificamos que existiam no mercado alguns sistemas similares, uns porém, só se comunicavam com a central de supervisório, via rede telefônica mediante demanda das unidades remotas o que reduz consideravelmente a confiabilidade para o nosso tipo de aplicação, outros, configuráveis para operar apenas via web, outros projetados para operar via rádio ou satélite, porém em sua maioria sistemas importados de alto custo e customizados para realidade de outros países. 6 – Agradecimentos A TV Rio Sul pelo apoio financeiro ao projeto. A AEDB pela infra-estrutura e orientação acadêmica fornecida para a realização deste projeto. 7 – Bibliografia 1) Ogata, Katsuhiko. Engenharia de Controle Moderno. Rio de Janeiro: Prentice – Hill do Brasil,1993. 2) Soares, Luis Fernando G. Redes de Computadores: das LANs, MANs e WANs as redes ATM. 2ª Ed. Rio de Janeiro: Campus, 1995. 3) Alves, Luis. Comunicação de Dados, 2ª Ed. São Paulo: Makron, 1994 4) Helder, Gilbert. Comunicação de Dados; tradução [da 6ª Ed. Original] de Vandenberg D. Souza). Rio de Janeiro, Campus, 1999. 5) Souza, David José. Conectando o PIC. Recursos Avançados. 1º Edição, São Paulo: Érica, 2003. 6) Cornell, Gary. Delphi Segredos e soluções. São Paulo: Makron Books, 1995. 7) Microchip Tecnology Inc. Chandler, Arizona (2005). Disponível em: http://www.microchip.com. Acesso em 04/04/2005. 9
Baixar