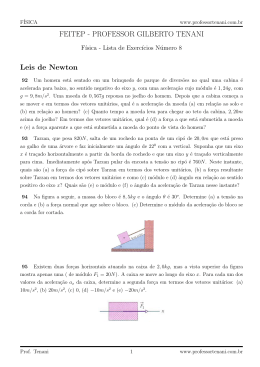
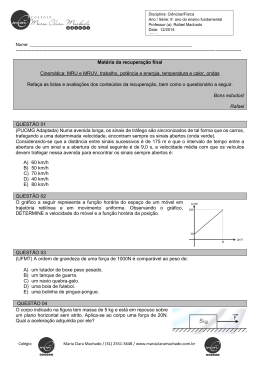
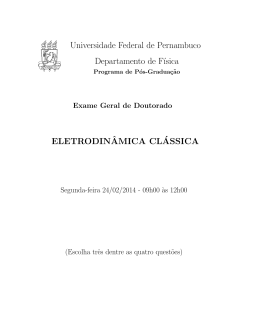
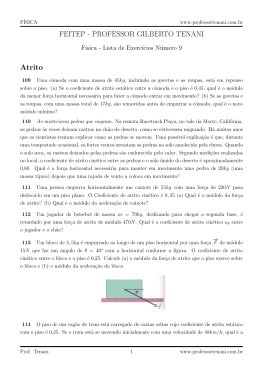
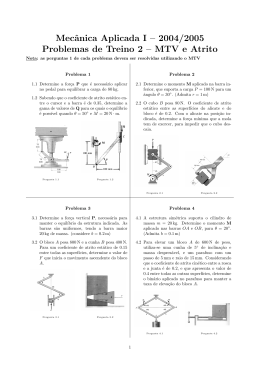
Mecânica Geral (MEG) Luciano Camargo Martins Departamento de Fı́sica Grupo de Din^ amica N~ ao Linear e Sistemas Din^ amicos N~ ao Lineares UDESC-Joinville-SC, Brasil [email protected] http://www.lccmmm.hpg.com.br Revisão 0.0.3 de 25 de janeiro de 2005 Prefácio Apresentamos nesta apostila, um resumo da teoria e alguyns exercı́cios resolvidos especialmente selecionados para o curso de Mecânica Geral da UDESC-Joinville. A apostila segue a mesma estrutura do livro texto Mecânica, de K. R. Symon, porém o texto foi enriquecido com exemplos retirados de outras referências bibliográficas1 . Alguns exemplos resolvidos foram bastante detalhados e ilustrados, a fim de demosntrar ao aluno a abordagem mais refinada que se dá no estudo da Mecânica Geral, mesmo a problemas simples e elementares. Tendo-se a paciência de ler os exercı́cios resolvidos, o aluno terá melhor visão do que se espera de uma “solução”de um problema de fı́sica no âmbito da Mecânica Clássica, e por extensão, de qualquer outra área da Fı́sica. Ao final do texto, nos apêndices, estão tabelas de fórmulas e expressões especı́ficas para cada um dos sistemas de coordenadas mais usados neste curso, são eles: o sistema cartesiano, o esférico e o cilı́ndrico. Bom estudo e divirtam-se! Professor Luciano Camargo Martins Joinville, 25 de janeiro de 2005 1 Veja-se as referências bibliográficas. i Sumário 1 Elementos de Mecânica Newtoniana 1 1.1 Mecânica, uma ciência exata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1.2 Cinemática, a descrição do movimento . . . . . . . . . . . . . . . . . . . . . . . . 1 1.3 Dinâmica, massa e força . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1.4 As leis do movimento, de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1.4.1 Alguns comentários . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Gravitação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.5.1 Uma Força Elementar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Unidades e dimensões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.6.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Alguns problemas elementares de Mecânica . . . . . . . . . . . . . . . . . . . . . . 6 1.5 1.6 1.7 Notação vetorial 2 Movimento Unidimensional de uma Partı́cula 14 A Sistemas de Coordenadas 28 A.1 Coordenadas Cartesianas (x, y, z) . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 A.1.1 Posição, Velocidade, Aceleração, etc... . . . . . . . . . . . . . . . . . . . . . 28 A.1.2 Gradiente e Laplaciano de uma função escalar ϕ = ϕ(x, y, z) . . . . . . . . 29 A.1.3 Divergente, Rotacional e Derivada de um vetor A = Ax i + Ay j + Az k . . 29 A.1.4 A Regra da Mão Direita para o produto vetorial . . . . . . . . . . . . . . . 29 A.2 Coordenadas Cilı́ndricas (ρ, ϕ, z) . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 A.2.1 Posição, Velocidade, Aceleração, etc... . . . . . . . . . . . . . . . . . . . . . 30 A.2.2 Gradiente e Laplaciano de uma função escalar f = f (ρ, ϕ, z) . . . . . . . . 31 A.2.3 Divergente, Rotacional e Derivada de um vetor A = Aρ uρ + Aϕ uϕ + Az k 31 A.3 Coordenadas Esféricas (r, θ, ϕ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 A.3.1 Posição, Velocidade, Aceleração, etc... . . . . . . . . . . . . . . . . . . . . . 32 A.3.2 Gradiente e Laplaciano de uma função escalar f = f (r, θ, ϕ) . . . . . . . . 33 A.3.3 Divergente e Rotacional e um vetor A = Ar ur + Aθ uθ + Aϕ uϕ . . . . . . 33 0 Capı́tulo 1 Elementos de Mecânica Newtoniana 1.1 Mecânica, uma ciência exata A Mecânica é a parte da Fı́sica que descreve e prediz as condições de repouso ou movimento de corpos sob a ação de forças. O problema geral da mecânica. Dadas as condições iniciais (posições e velocidades) dos corpos de interesse (sistema mecânico em estudo), as forças que atuam sobre estes corpos e as equações básicas que devem ser satisfeitas (leis de Newton) em geral quer-se encontrar, em qualquer instante futuro, as novas posições e velocidades destes corpos. Neste sentido, diz-se que a Mecânica é determinı́stica pois as equações admitem em geral apenas uma solução, e em condições ideais, seria então possı́vel se predizer o futuro de um sistema mecânico, desde fosse possı́vel resolver analiticamente as equações de Newton do sistema, o que em geral é impossı́vel. Apenas para alguns poucos sistemas muito simplificados será possı́vel uma descrição exata, sendo em geral, baseados em modelos muito irreais. Por exemplo, uma partı́cula em queda livre pode ser idealizada, modelada e seu movimento completamente determinado, em condições ideais onde muitas simplificações são feitas. A pergunta é a seguinte, poderemos observar esse tipo de sistema no mundo real e o seu comportamento mecânico será o mesmo? 1.2 Cinemática, a descrição do movimento Repouso e movimento são conceitos relativos, isto é, dependem da escolha de um referencial onde está o observador. Assim, para descrever um dado movimento, um observador deve definir um sistema de referência, ou referencial, a partir do qual ele fará as medições necessárias para a o estudo do movimento de interesse. Num dado refencial O, um observador pode medir a passagem de uma partı́cula num ponto de coordenadas (x, y, z) num dado instante t. Um outro observador num outro referencial O 0 , observa o mesmo fenômeno e determina que a partı́cula estava no ponto (x 0 , y 0 , z 0 ) no instante t0 , marcado no seu relógio local. Ambos observaram a mesma partı́cula, mas podem chegar a conclusões diferentes. Por exemplo, um deles pode concluir, após uma segunda medição, que a partı́cula está em repouso, e o outro que ela está em movimento. Ambos podem estar certos, e descrevem o movimento relativo da partı́cula visto de cada um dos dois referenciais O e O 0 simultanamente. A Mecânica Clássica baseia-se nessa idéia de Galileu, de que o espaço é relativo, ou seja, depende do referencial adotado, porém o tempo é absoluto e universal e não depende do referencial usado. Para os observadores da partı́cula no caso exposto acima, mesmo que ambos tivessem leituras diferentes em seus relógios, estaria determinando o mesmo instante universal, se seus relógios estivessem sincronizados. Mesmo com medições diferentes no espaço e no tempo, Galileu imaginou que as leis da natureza deveriam ser invariantes, ou seja, ter a mesma foema matemática em qualquer referencial que se movam com velocidade constante, uns em relação aos outros, os ditos referenciais inerciais. Considerando-se que as coordenadas (x, y, z, t) de uma partı́cula podem assumir qualquer valor real, ou seja, são variáveis contı́nuas, podemos usar o cálculo diferencial e definir as velocidades vx = dx , dt vy = dy dz e vz = dt dt (1.1) e acelações dvx d2 x dvy d2 y dvz d2 z = 2 , ay = = 2 e az = = 2 dt dt dt dt dt dt ao longo dos eixos X, Y e Z do referencial O usado. ax = (1.2) Ou seja, as funções x(t), y(t) e z(t) descrevem completamente o movimento da partı́cula ao longo dos respectivos eixos espaciais, e portanto, o seu movimento no espaço fica completamente determinado, e pode ser descrito pelo vetor de posição v(t) = x(t)i + y(t)j + z(t)k (1.3) numa base cartesiana ortonormal {i, j, k}. Como será visto nos capı́tulos seguintes, existem outras bases vetoriais possı́veis para representar o vetor r(t), e as mas usadas além da cartesiana, são a base cilı́ndrica e a base esférica. 1.3 Dinâmica, massa e força Os conceitos de massa, inércia e força são fundamentais na Mecânica de Newton, são conceitos primitivos, ou seja não derivados. Tais conceitos provém intuitivamente da experimentação cuidadosa feita em laboratório, usando-se diferentes corpos e medindo-se os efeitos causados nos seus movimentos durante colisões, por exemplo. Dessa experimentação meticulosa e exaustiva, pode-se concluir que, para dois corpos de massas mA e mB , por exemplo, as acelerações sofridas estão na razão inversa de suas massas, ou seja: mA aB = mB aA (1.4) ou ainda, podemos dizer que mA aA = mB aB = constante. A essa constante chamamos de “força”. 1.4 As leis do movimento, de Newton Revisão das leis de Newton, desenvolvidas em 1687, para corpos de massa constante: Primeira lei de Newton. Um corpo permanece em repouso ou com velocidade constante (aceleração zero) quando abandonado a si mesmo, isto é, quando forças externas não atuam sobre ele. a = 0 ⇐⇒ F = 0 (1.5) Esta é a chamada lei da inércia, pois o estado de movimento (velocidade) de um corpo só será alterado se alguma força externa não nula atuar sobre o corpo. Observe que, a partir desta lei, podemos concluir que um corpo pode se mover indefinidamente (por inércia) mesmo que nenhuma força atue sobre ele, ou seja, não é necessário a presença de uma força para manter um corpo em movimento, ou em repouso, num caso particular de movimento. Segunda lei de Newton. A força total (ou resultante) s0bre um corpo é o produto da massa m do corpo vezes a sua aceleração a: F = ma (1.6) Esta lei também é conhecida como princı́pio funcamental da Mecânica, pois, no caso de haver uma força resultante sobre um corpo, ela permite se determinar qual a aceleração que este corpo terá, ou seja, com que taxa temporal o seu estado de movimento será alterado. Observe também que a aceleração sofrida pelo corpo de massa m, para uma dada força resultante F, será inversamente proporcional à sua massa. Neste sentido, dizemos que a massa de um corpo é uma mediade de sua inércia. F (1.7) a= m Ou seja, quanto maior a massa de um corpo (maior sua inércia) menor o efeito causado pela força sobre ela (aceleração). Observe também que a aceleração a sofrida pelo corpo será sempre proporcional à força resultante F, e portanto estes vetores terão sempre a mesma direção e o mesmo sentido, uma vez que a massa m será sermpre positiva. Mas cuidado, não se pode descrever o movimento de uma partı́cula de massa nula, sob a ação de uma força resultante não nula, pois terı́amos uma aceleração infinita, o que não tem sentido fı́sico. Terceira lei de Newton. Sempre que dois corpos 1 e 2 interagem, a força F 12 , que o corpo 1 exerce sobre o corpo 2, é igual e oposta à força F21 , que o corpo 2 exerce sobre o copor 1: F12 = −F21 (1.8) Essa lei é chamada de lei de acão e reação, e segundo ela, as forças de contato que ocorrem em colisões, por exemplo, aparecem sempre aos pares. Desta forma não é possı́vel se produzir uma força sem que uma reação contrária também surja. Observe que esse par de força em geral não tuam no mesmo corpo, não se anulando, portanto. É claro que as forças são indistiguı́veis, ou seja, não faz diferença qual das forças chamamos de ação, ou reação. 1.4.1 Alguns comentários Existem limitações para a validade da terceira lei, pois ela pressupõe que as forças sejam medidas instantaneamente, ou seja, que as partı́culas não se movam muito durante o tempo da colisão. Esta aproximação é muito boa para uma colisão de dois automóveis, pois o intervalo de tempo da colisão é muito maior do que o tempo que um raio de luz leva para atravessar um automóvel amassado de tamanho L: L 3, 0 m ∆t ≈ ≈ ≈ 10−8 s (1.9) 8 c 3, 0 × 10 m/s Essa aproximação não funciona bem para colisões de partı́culas atômicas de alta energia, por exemplo. As duas primeiras leis valem somente quando se observa o corpo em sistemas de referência não acelerados, como mostra a nossa experiência diária. Para um corpo permanecer em equilı́brio num sistema acelerado, num ônibus freando, por exemplo, é necessário que atue sobre ele uma força. Não havendo essa força, o corpo não irá frear junto com o ônibus, mentendo sua velocidade constante, para um observador fora do ônibus, ou seja, o corpo será lançado para a frente, podendo mesmo sair pelo parabrisa do ônibus. 1.5 Gravitação A lei da gravitação universal, proposta por Newton em 1685, é um modelo matemático para descrever a interação entre massas de pequenas dimensões (partı́culas), e pode ser usada para explicar desde o mais simples fenômeno, como a queda de um corpo próximo à superfı́cie da Terra, até, o mais complexo, como as forças entre corpos celestes, traduzindo com fidelidade suas órbitas e os diferentes movimentos. Segundo a lenda, ao observar a queda de uma maçã, Newton ficou intrigado ao ver a Lua no céu e teria se perguntado porquê a Lua não cai, como a maçã. Ele investigou a hipótese de que ela ambas, Lua e maçã, deveriam ser atraı́das pela Terra, segundo uma mesma lei simples, e chegou na famosa lei de gravitação. A natureza desta força atrativa é a mesma que deve existir entre a Terra e a Lua ou entre o Sol e os planetas; portanto, a atração entre as massas é um fenômeno universal. 1.5.1 Uma Força Elementar Sejam duas partı́culas de massas m1 e m2 , separadas por uma distância r. Segundo Newton, a intensidade da força F de atração entre as massas é dada por F =G m1 m2 r2 (1.10) onde G é uma constante, a constante da gravitação universal, sendo seu valor expresso, no Sistema Internacional, por G = 6, 67 × 10−11 N · m2 /kg 2 (1.11) F 21 m 2 F 12 m 1 Figura 1.1: Duas partı́culas se massas m1 e m2 sempre se atraem mutuamente, dando origem a um par de forças F12 e F21 . As forças F12 e F21 é a da reta que une as partı́culas, e o sentido tal que as massas sempre se atraem mutuamente, com mesma intensidade de força, ou seja F12 = F21 (1.12) Podemos, ainda, enunciar a lei da gravitação universal do seguinte modo: Dois corpos se atraem gravitacionalmente com força cuja intensidade é diretamente proporcional ao produto de suas massas e inversamente proporcional ao quadrado da distância entre seus centros de massa. Após a formulação da lei da Gravitação, com o desenvolvimento do cálculo integral, Newton também mostrou que a força gravitacional entre esferas homogêneas também segue a mesma forma estabelecida para as partı́culas. E também vale a mesma força para uma partı́cula e uma esfera homogênea. Esse resultado foi tão surpreendente para o proóprio Newton, que inicialmente nem ele acreditou no que havia provado matematicamente! Aplicando-se a lei de gravitação para um corpo de massa m na superfı́cie da Terra, temos então F =G MT m GMT = m = mg = P 2 RT RT2 onde RT e MT são o raio e a massa da Terra, respectivamente, e à força obtida chamamos peso. Medidas atuais mostram que MT = 5, 98×1024 kg e RT = 6, 37×106 m. A constante g que aparece acima é justamente a aceleração da gravidade na superfı́cie da Terra. Experimente calcular g com os dados fornecidos! Observações importantes 1. A força gravitacional é sempre atrativa; 2. A força gravitacional não depende do meio onde os corpos se encontram imersos; 3. A constante da gravitação universal G teve seu valor determinado experimentalmente por Henry Cavendish, em 1798, por meio de um instrumento denominado balança de torção e esferas de chumbo. Pense e Responda! • Qual a direção e o sentido da força de atração gravitacional exercida pela Terra sobre os corpos que estão próximos à superfı́cie? • A aceleração da gravidade na Lua é 6 vezes menor do que a aceleração da gravidade próxima à superfı́cie da Terra. O que acontece com o peso e a massa de um astronauta na Lua? • O valor da aceleração da garvidade é relevante para os esportes? 1.6 Unidades e dimensões Neste curso usaremos preferencialmente o Sistema Internacional de Unidades (SI) para representar as medidas numéricas das grandezas fundamentais da Mecânica: grandeza dimensão unidade SI sı́mbolo comprimento L metro m massa M kilograma kg tempo T segundo s −1 velocidade LT metro por segundo m/s aceleração LT −2 metro por segundo, por segundo m/s2 força M LT −2 newton N = kg · m/s2 momento linear M LT −1 newton vezes segundo N · s = kg · m/s Sempre que um problema envolva cálculos numéricos, usaremos a notação cientı́fica para representar as medidas (intensidades) das grandezas envolvidas. Muitos dos exercı́cios e problemas do final de cada capı́tulo do livro texto do curso [1], são bastante similares, de modo que o aluno deve escolher apenas um de cada tipo para atividade de casa. Sugerimos ao aluno, ler sempre a parte teórica e os exemplos feitos no livro texto, antes de tentar resolver os problemas escolhidos, relativos a uma determinada seção do livro texto, ou capı́tulo. A discussão e estudo em grupo de alunos pode ser feita, porém cada aluno deve finalmente ser capaz de responder por escrito a cada um dos problemas estudados, com suas próprias palavras. Para a completa e correta solução dos problemas propostos, o aluno deverá formular as hipóteses necessárias e suficientes para desenvolver seus cálculos a partir de primeiros princı́pios, ou seja, dos princı́pios fundamentais e das leis fı́sicas básicas envolvidas em cada tipo de problema. Neste processo de desenvolvimento e solução de problemas, é imprescindı́vel que o aluno observe as unidades das medidas e grandezas a serem determinadas/utilizadas, a sua correta representação em um sistema de medidas, preferencialmente o Sistema Internacional de medidas (SI), as dimensões destas grandezas e a sua representação com o número correto de algarismos significativos, isto quando tratar-se de problemas com resultados numéricos a serem obtidos. A fim de minimizar a propagação de erros numéricos sugerimos que o aluno use, sempre que possı́vel, pelo menos três algarismos significativos para as grandezas medidas e resultados obtidos nos problemas que envolvam cálculos numéricos. Nos problemas cuja solução é puramente algébrica analı́tica, o aluno deve fazer uso da análise dimensional para verificar a homogeneidade dimensional das expressões e resultados obtidos, testando sempre que possı́vel os limites conhecidos destas expressões, e comparando seus resultados com outros resultados gerais já estudados. 1.6.1 Notação vetorial Os livros de Fı́sica, em geral, fazem o uso de letras em negrito para representar grandezas vetorias. Por exemplo, a segunda lei de Newton é escrita na forma F = ma, que é completamente equivalente à forma clássica F~ = m~a, preferida por alguns autores. Quando alguma fórmula vetorial for manuscrita, devemos fazer uso da segunda forma, para que fique claro o caráter vetorial ou escalar de cada grandeza, já que normalmente não escrevemos em negrito. 1.7 Alguns problemas elementares de Mecânica 1) Calcule a força de atração gravitacional entre um elétron e um próton separados por uma distância de 0, 5 Å (1 Å = 10−8 cm). Compare com a força de atração eletrostática cuja distância de separação seja a mesma. Considerando-se o próton e o elétron como partı́culas de massas m p e me , respectivamente, a força gravitacional (atrativa) entre eles terá a seguinte intensidade (módulo), dada pela lei de gravitação de Newton (6, 67 × 10−11 N · m2 /kg 2 )(1, 67 × 10−27 kg)(9, 11 × 10−31 kg) G m p me = r2 (0, 5 × 10−10 m)2 = 4 × 10−47 N . (1.13) FG = FG A força elétrica entre estas partı́culas, também atrativa, segundo a lei de Coulomb FE = k q p qe (8, 99 × 109 N · m2 /C 2 )(1, 60 × 10−19 C)2 = = 9 × 10−8 N . 2 −10 2 r (0, 5 × 10 m) (1.14) Dividindo-se os módulos das forças, obtemos a razão FE 9 × 10−8 N ≈ 2 × 1039 = FG 4 × 10−47 N (1.15) J ou seja, a força elétrica é muito maior (≈ 1039 vezes) do que a força gravitacional. 2) Dois carros1 , A e B, movem-se no mesmo sentido. Quando t = 0, suas respectivas velocidades são 1 m/s e 3 m/s, e suas respectivas acelerações são 2 m/s2 e 1 m/s2 . Se no instante t = 0 o carro A está a 1, 5 m à frente do carro B, determinar o instante em que eles estarão lado a lado. Análise inicial. Vamos investigar inicialmente qual tipo de problema que está sendo proposto. Como o problema envolve apenas o movimento de dois carros, cujas massas são desconhecidas e nenhuma força é dada, concluimos que se trata de um problema de cinemática. Modelo. Vamos supor que os carros se movam numa pista reta e horizontal, da esquerda para a direita (sobre o eixo X, no sentido crescente do eixo, por exemplo). Nosso “sistema mecânico”de interesse inclui os dois carros e o referencial do chão, a pista: 1,5 m 3 m/s x B O 1 m/s x A X Figura 1.2: O nosso modelo simplificado para o sistema de dois carros A e B, no instante inicial t = 0. Equações de movimento. Vamos supor também que os carros possam ser tratados como partı́culas uniformemente aceleradas, ou seja, estão em MRUV, e portanto, suas posições em função do tempo seguem a forma geral 1 x(t) = x0 + v0 (t − t0 ) + a(t − t0 )2 2 (1.16) Como o carro A inicia o seu movimento adiante do carro B, em 1, 5 m, então temos que x A0 = xB0 + 1, 5 m, é a sua posição inicial, em função da posição inicial x B0 do carro B, que não é dada. Será que esse dado é relevante? A equação de movimento para o carro A será então 1 1 xA (t) = xA0 + vA0 (t − t0 ) + aA (t − t0 )2 = xB0 + 1, 5 m + (1 m/s)t + (2 m/s2 )t2 2 2 (1.17) onde consideramos t0 = 0. A posição do carro B será dada por 1 1 xB (t) = xB0 + vB0 (t − t0 ) + aB (t − t0 )2 = xB0 + (3 m/s)t + (1 m/s2 )t2 2 2 (1.18) Soluções. Vamos procurar o instante onde os carros ficam lado a lado, ou seja, ocupam a mesma posição sobre o eixo horizontal sem que haja colisão, resolvendo-se a equação x A (t) = xB (t), ou de forma equivalente, vamos escrever xA (t) − xB (t) = 0, subtraindo as equações anteriores, de onde obtemos: 1 (1, 5 m) − (2 m/s) t + ( m/s2 ) t2 = 0 (1.19) 2 e multiplicando-se por 2 s2 /m e reescrevendo t2 + (−4 s) t + (3 s2 ) = 0 1 Referência [2], problema 5.12, página 108. (1.20) e resolvendo para t, temos t= −(−4 s) ± p donde (−4 s)2 − 4 · 1 · (3 s2 ) 2·1 (1.21) 4s±2s (1.22) 2 e concluimos finalmente que os carros estarão lado a lado em dois instantes futuros: t − = 1 s e t+ = 3 s. t= Análise gráfica. A partir do gráfico da Fig. 1.3, confirmamos visualmente que as posições de ambos coincidem nos instantes t− = 1 s e t+ = 3 s, e que suas posições nesses instantes são, respectivamente, xA = xB = 4, 5 m e xA = xB = 13, 5 m, o que pode ser obtido analiticamente substituindo-se os instantes t− e t+ , nas equações horárias xA (t) e xB (t). A concordância desses valores obtidos, para ambos os carros, confirma o resultado esperado, que ambos estejam lado a lado nesses instantes. 20 carro A: x_A(t) carro B: x_B(t) x (m) 15 10 car 5 carro A: cid elo :v ro B l icia in ade l de inicia velocida A 0 A 0,0 B 0,5 1,0 1,5 2,0 t (s) 2,5 3,0 3,5 4,0 Figura 1.3: Os gráficos da posição versus tempo para os carros. Análise geral. Para análise final do movimento, marcamos sobre o gráfico as inclinações iniciais (tangentes) das curvas xA (t) e xB (t), donde se pode ver que o carro B, inicialmente mais lento, ultrapassa o carro A no instante t− = 1, 0 s e depois, no instante t+ = 3, 0 s, é ultrapassado pelo o carro A, que no inı́cio era mais lento, porém possui aceleração maior do que a do carro B. Observe dos gráficos que a “curvatura”parábola (linha) de x A (t) é maior do que a de xB (t). Em geral, neste tipo de gráfico, a curvatura é proporcional à segunda derivada da função, no caso d2 x(t)/dt2 , que é a aceleração do móvel. Contextualização. Este tipo de movimento ocorre frequentemente nas corridas (de Fórmula 1, por exemplo) quando um carro B tenta ultrapassar outro A numa curva. Neste caso real o movimento não é retilı́neo, mas as suas outras caracterı́sticas são semelhantes às do problema estudado. Para executar a tentativa de ultrapassagem, o piloto do carro B, que vem logo atrás do carro A retarda a freada e entra na curva com maior velocidade, saindo do traçado ideal (de menor tempo). B A Carro A B Carro B B B B A A B A A A CASIO CASIO AM AM B CASIO ALM DUAL TMR CHR ALM DUAL TMR CHR A AM CASIO ALM DUAL TMR CHR AM A ALM DUAL TMR CHR B CASIO B CASIO AM ALM DUAL TMR CHR AM ALM DUAL TMR CHR A Figura 1.4: O piloto do carro B tenta ultrapassar o carro A e leva um “X”. Desta forma o carro B consegue ultrapassar o carro A, mais lento, porém na retomada da velocidade, o carro A conseguirá acelerar mais do que o carro B que fora do traçado ideal, não terá o mesmo rendimento (pista suja e maior percurso), sendo que o carro A irá, a seguir, retomar a sua posição à frente do carro B. Essa manobra é o famoso “X”, e diz-se que o piloto do carro B tomou um “X”do piloto do carro A, o que é considerado bastante “humilhante”para o piloto B, pois suas intenções de ultrapassar o carro A foram frustadas. Veja-se a Fig. 1.4. J 3) Um carro 2 de massa M , transportando quatro pessoas, cada uma com massa m, viaja em uma estrada de terra coberta de pequenas ondulações (costeletas), com saliências separadas de uma distância λ. O carro balança com amplitude máxima quando sua velocidade é v. O carro para e os quatro passageiros desembarcam. De quanto sobe a carroceria do carro em sua suspensão, devido ao decréscimo de peso? Como primeira hipótese, vamos supor por simplicidade que o carro seja um sistema massa-mola amortecido, já que sua carroceria está apoiada sobre a sua suspensão, baseada em quatro molas (em paralelo), amortecedores, rodas e pneus. Como a maior parte da massa do carro está na sua carroceria, e nos quatro passageiros embarcados, vamos considerar que o carro é um oscilador massa-mola amortecido de massa total mt = M + 4m, ligado a uma mola de constante elástica efetiva k, que inclui o efeito de todas as molas de sua suspensão. 2 Veja ref. [4] v λ λ Figura 1.5: Um automóvel andando com velocidade v sobre uma estrada com ondulações (costeletas), igualmente espaçadas de uma distância λ, fica sujeito à impulsos verticais periódicos. À medida que o carro se desloca na estrada com velocidade constante v, as saliências produzem forças verticais (impulsos) periódicos, já que estão igualmente espaçadas de uma distância λ. O perı́odo T desta força externa que atua sobre o carro será exatamente o tempo que o carro leva para se deslocar de uma saliência até a outra, ou seja, como v = λ/T (1.23) T = λ/v (1.24) então temos que Podemos dizer então que essa força externa produzida pelas ondulações da estrada possuem uma frequência angular ω = 2π/T = 2πv/λ . (1.25) Como o motorista do carro observou que a amplitude das oscilações verticais feitas pelo carro é máxima quando ele se desloca com uma dada velocidade v, podemnos supor que o carro, ou o sistema massa-mola equivalente, entra em ressonância nessa velocidade, devido aos impulsos externos periódicos de frequência ω. Sabendo-se que um sistema massa-mola possui frequência natural de oscilação dada por r k ω0 = m (1.26) onde m é sua massa e k o valor da constante elástica da mola à qual a massa está conectada, podemos supor que, para o nosso carro r r k k = . (1.27) ω0 = mt M + 4m Como o carro entrou em ressonância na velocidade v, supomos então que foi atingida a condição de ressonância, ou seja ω ' ω0 (1.28) então r (1.29) k ' (2πv/λ)2 (M + 4m) . (1.30) k M + 4m de onde podemos obter a constante elástica k efetiva do carro: 2πv/λ ' Finalmente, como a suspensão do carro segue a lei de Hooke, ao se acrescentar a massa dos quatro passageiros (que entraram no carro), a deformação da carroceria (suspensão) pode ser calculada da lei de Hooke: F = −k ∆x (1.31) onde k é a constante elástica efetiva da suspensão do carro e F é a força peso (4mg) acrescentada ao sistema. Em módulo, a deformação ∆x será então ∆x = 4mg F = . k k (1.32) É importante se observar que a constante elástica k de uma mola mede a sua “rigidez”, ou seja, quanto maior o seu valor mais “dura” ela é, e mais difı́cil é a sua deformação. Porém, dentro de uma faixa de deformação elástica, a rigidez de uma mola que segue a lei de Hooke é sempre a mesma, fazendo juz ao nome de “constante”. Sendo assim, não é relevante o fato das molas do carro já estarem comprimidas, pelo seu próprio peso (M g), antes dos passageiros tomarem assento. Ao deixarem o carro, o excesso de peso 4mg é removido do sistema e a carroceria do carro então sobe a mesma quantidade que ela baixou quando os passageiros entraram no carro. Portanto, a partir das equações (1.30) e (1.32), podemos concluir que, a carroceira deverá subir aproximadamente 4mg ∆x ' . (1.33) (2πv/λ)2 (M + 4m) quando os passageiros saı́rem do carro. Numericamente, se utilizarmos dados razoáveis como M = 1.000 kg, m = 75, 0 kg, g = 9, 81 m/s 2 , v = 10, 0 m/s e λ = 15, 0 m, teremos ∆x ' 4(75, 0 kg)(9, 81 m/s2 ) = 0, 129 m . {(2π)(10, 0 m/s)/(15, 0 m)}2 (1.000 kg + 4(75, 0 kg)) (1.34) Comentários Na solução simples proposta para esse problema, é notável a quantidade de hipóteses, considerações, aproximações, fenômenos e leis fı́sicas envolvidas e necessárias ao seu desenvolvimento. Após um longo e encadeado raciocı́nio, baseado num modelo simples — o sistema massa mola, chegamos à solução dada pela equação (1.33), que dificilmente poderia ter sido obtida por um método muito mais simples do que este apresentado acima. Porém, esta é somente uma solução proposta, e esperamos que um aluno de Fı́sica consiga, com suas próprias palavras e métodos, chegar a uma solução própria do mesmo problema, quem sabe mais simples ainda. Na Fı́sica, consideramos que a beleza está na simplicidade, na generalidade e na clareza, tanto em se tratando da formulação de um problema, quanto na sua solução. Como preenche esses três requisitos básicos, considero que este é um belo problema de Fı́sica, francamente, o mais belo de todos que já vi. J 4) Uma força horizontal F é feita sobre um bloco de massa m que está em repouso sobre um plano sem atrito, inclinado de um ângulo θ com a horizontal. A) Determine a intensidade da força F para o equilı́brio do bloco. Para o sistema de eixos XY usual, temos que ter, para o equilı́brio do bloco: X Fx = F − N sin θ = 0 X Fy = P − N cos θ = 0 (1.35) (1.36) já que a normal N faz um ângulo θ com o eixo Y . Dividindo-se as equações de equilı́brio temos: F/P = tan θ (1.37) donde, finalmente F = P tan θ = mg tan θ (1.38) B) Determine a posição x(t) do bloco, se a força horizontal for removida. Definindo-se um sistema de eixos X 0 Y 0 , sendo o eixo X 0 paralelo ao plano inclinado teremos, depois da remoção da força F: X (1.39) Fx0 = −mg sin θ = ma e cancelando-se a massa m do bloco a = −g sin θ (1.40) que é a aceleração constante do bloco, na descida do plano. Como a = dv/dt, para o caso de aceleração constante, temos: Z v(t) dv = v0 Z t 0 a dt = a 0 Z t dt0 = a t (1.41) 0 então v(t) = v0 + a t (1.42) e como v0 = 0, temos que v(t) = at. E como v = dx/dt, temos: Z x(t) dx = x0 Z t 0 0 v(t ) dt = 0 1 x(t) − x0 = v0 t + at2 2 e se fizermos x0 = 0 e v0 = 0, teremos Z t (v0 + at0 )dt0 (1.43) 0 1 x(t) = at2 2 (1.44) (1.45) Para o bloco solto em repouso na origem do sistema X 0 Y 0 , finalmente teremos: x(t) = 1 g sin θ t2 . 2 (1.46) J 5) Um projétil de massa m é lançado verticalmente com velocidade inicial v 0 da superfı́cie de uma planeta de massa M e raio R, sem atmosfera, e observa-se que ele atinge uma altura máxima h, acima de sua superfı́cie. A) Escreva uma expressão particular para a massa desse planeta. Como a força gravitacional é conservativa, e o planeta não tem atmosfera, pode-se usar o teorema do trabalho-energia, para as posições inicial e de altura máxima do projétil, obtendo-se: 1 2 GM m GM m mv0 − =0− 2 R R+h (1.47) onde R é o raio do planeta, M sua massa e h a altura máxima (v = 0) do projétil de massa m. Dividindo-se a última equação por GM e reagrupando-se os termos, temos: 1 1 −v02 − = R+h R 2GM (1.48) e finalmente v2R M= 0 2G R+h h . (1.49) B) Determine a velocidade de escape para esse planeta? Tomando-se o limite h → ∞ na expressão final da massa M do item A), pode-se obter o valor v e da velocidade de escape, que é justamente o valor de v0 nesse limite: ve2 R R v2R M= lim +1 = e (1.50) 2G h→∞ h 2G Logo ve = r 2GM . R (1.51) J Capı́tulo 2 Movimento Unidimensional de uma Partı́cula PROBLEMAS 9) Um cabo-de-guerra é seguro por dois grupos de cinco homens, cada um. Cada homem “pesa” 70 kg e pode puxar o caboinicialmente com uma força de 100 N . Inicialmente os dois grupos estão compensados, mas quando os homens cansam, a força com que cada um puxa o cabo decresce de acordo com a relação F (t) = (100 N ) e−t/τ (2.1) onde o tempo médio τ para atingir o cansaço é de 10 s para um grupo e 20 s para o outro. Suponha que nenhum dos homens solte o cabo e use g = 9, 8 m/s2 . a) Determine o movimento. Vamos supor que inicialmente o cabo-de-guerra está parado, e o centro da corda está na origem O do eixo orizontal X, e vamos chamar a equipe da esquerda de equipe 1, e a da direita de equipe dois. Sendo assim, o tempo médio para atingir o cansaço, será, τ 1 = 10 s, para a equipe 1 e τ2 = 20 s para a equipe 2. Consideremos como nosso sistema o conjunto todo, incluindo a corda. Cada homem faz a força F (t) sobre o chão, e sofre a reação desta força, que age sobre o conjunto (sistema). A resultante destas forças será: X Fx = −5F1 (t) + 5F2 (t) = (10m)a (2.2) onde 10m é a massa total do sistema, e a = dv/dt a sua aceleração. Reescrevendo temos 5{−F0 e−t/τ1 + F0 e−t/τ2 } = 10m 14 dv dt (2.3) onde F0 = 100 N e m é a massa de cada homem. Simplificando e separando as variáveis, temos F0 2m Z t (e −t0 /τ2 0 −e −t0 /τ1 0 ) dt = Z v(t) dv (2.4) 0 já que no instante inicial t = 0 o sistema está em repouso. Integrando temos a velocidade do conjunto F0 v(t) = 2m 0 0 e−t /τ2 e−t /τ1 − −1/τ2 −1/τ1 t (2.5) t0 =0 substituindo nos limites v(t) = − e reescrevendo temos v(t) = F0 τ2 (e−t/τ2 − 1) − τ1 (e−t/τ1 − 1) 2m F0 τ2 (1 − e−t/τ2 ) − τ1 (1 − e−t/τ1 ) 2m Integrando-se mais uma vez, termos a posição do conjunto (centro da corda) Z Z t o F0 t n 0 0 τ2 (1 − e−t /τ2 ) − τ1 (1 − e−t /τ1 ) dt0 dx = x(t) − x(0) = 2m t0 =0 t0 =0 (2.6) (2.7) (2.8) ou seja, como x(0) = 0 temos F0 x(t) = 2m t 0 0 e−t /τ2 e−t /τ1 0 0 τ2 t − − τ1 t − −1/τ2 −1/τ1 t0 =0 (2.9) e substituindo os limites x(t) = e reescrevendo x(t) = F0 τ2 {t + τ2 (e−t/τ2 − 1)} − τ1 {t + τ1 (e−t/τ1 − 1)} 2m F0 τ2 {t − τ2 (1 − e−t/τ2 )} − τ1 {t − τ1 (1 − e−t/τ1 )} 2m (2.10) (2.11) Desse resultados, podemos ver que se τ1 = τ2 , a corda nunca se moverá para lado nenhum já que as equipes farão sempre a mesma força, num mesmo instante t, apesar de fazerem cada vez menos força. b) Qual a velocidade final dos dois times? Tomando-se o limite t −→ ∞ em (2.7) temos a velocidade final vF do sistema vF = lim v(t) = t→∞ F0 (τ2 − τ1 ) 2m (2.12) e como a equipe 2 cansa mais devagar do que a equipe 1, pois τ2 > τ1 , a vencedora será a equipe 2, e a velocidade final será vF = 100 N (20 s − 10 s) = 7, 1 m/s 2 · 70 kg c) Qual das suposições é responsável por este resultado não razoável? (2.13) O modelo da força, decaindo exponencialmente a zero, é irreal para o limite feito acima, pois as equipes não manterão a força por um tempo muito longo, de forma que depois de alguns segundos t >> τ as forças já serão pequenas e a disputa terá acabado. Como a equipe 2 cansa mais devagar, consegue realizar um impulso maior sobre o sistema, que depois de um longo tempo será arrastado para a direita, desequilibrando as forças e ganhando o cabo-de-guerra. J 11) Um barco cuja velocidade inicial é v0 é desacelerado por uma força de atrito F = −beαv (2.14) a) Determine o seu movimento. Supondo que o barco inicie o seu movimento para a direita (v 0 > 0) no instante t0 = 0, na origem x0 = 0, temos: dv (2.15) F (v) = −beαv = m dt e separando as variáveis e integrando Z v(t) Z dv 0 b t 0 dt = (2.16) − αv 0 m t0 =0 v 0 =v0 e −αv0 v(t) e b − t= m −α v0 =v0 (2.17) αb t = e−αv(t) − e−αv0 m (2.18) αb t m (2.19) e isolando-se v(t) temos e−αv(t) = e−αv0 + e tomando-se o logaritmo desta expressão (2.20) 1 αb −αv0 v(t) = − ln e + t α m (2.21) −αv(t) = ln e e finalmente −αv0 αb + t m Observe que o barco se move inicialmente para a direita e a expressão encontrada dá a sua velocidade até que ele pare, e esta deve ser positiva. Na verdade, o termo e −αv0 < 1 e seu logaritmo é negativo, resultando que v(t) > 0, desde t = 0 até o instante em que o barco para. Integrando-se a velocidade v(t) = dx/dt, temos Z x(t) x0 1 dx = − α 0 Z v(t) ln e v 0 =v0 −αv0 αb + t0 m dt0 e integrando-se por substituição direta (u = e−αv0 + αbt0 /m; du = (αb/m)dt0 ), temos: Z m x(t) = − 2 ln u du α b e como Z ln u du = u(ln u − 1) (2.22) (2.23) (2.24) v(t) Vo O t Figura 2.1: A velocidade do barco v(t) × t, válida até v = 0. temos m x(t) = − 2 α b e −αv0 αb + t0 m t αb 0 −αv0 ln e + t −1 m t0 =0 e substituindo nos limites de integração αb αb m −αv0 −αv0 −αv0 −αv0 e + t ln e + t −1 − e ln(e )−1 x(t) = − 2 α b m m (2.25) (2.26) e finalmente m x(t) = − 2 α b e −αv0 αb + t m αb −αv0 −αv0 ln e + t −1 +e (αv0 + 1) m (2.27) b) Determine o tempo e a distância necessária para parar o barco. Podemos determinar o instante tF em que o barco para através da expressão (2.21), resolvendo v(tF ) = 0, ou seja, 1 αb −αv0 − ln e (2.28) + tF = 0 α m e essa equação será satisfeita quando o argumento da função ln for igual a 1, pois ln(1) = 0. Então temos que ter αb −αv0 (2.29) e + tF = 1 m de onde αb tF = 1 − e−αv0 m (2.30) e finalmente m (1 − e−αv0 ) αb será o instante em que o barco terá velocidade nula. tF = (2.31) A posição do barco nesse instante será αb m αb m m −αv0 −αv0 −αv0 −αv0 · (1 − e · (1 − e ) ln e ) −1 + e + x(tF ) = − 2 α b m αb m αb +e−αv0 (αv0 + 1) (2.32) e simplificando x(tF ) = m −αv0 1 − e (αv + 1) 0 α2 b (2.33) Observe que se v0 = 0 então terı́amos tF = 0. Como o barco partiu da posição x(0) = 0, podemos dizer que o seu deslocamento total (máximo) será então x(tF ) − x(0) = x(tF ). J 18) Uma partı́cula de massa m está sujeita à ação de uma força F = −kx + kx3 a2 (2.34) onde k e a são consatantes. a) Determine V (x) e discuta os possı́veis tipos de movimentos que possam ocorrer. b) Mostre que se E = 41 ka2 , a intergral na Eq. (2.46) poder ser resolvida por métodos elementares. Determine x(t) para este caso, escolhento x0 e t0 de maneira conveniente. Mostre que os seus resultados concordam com a discussão qualitativa do item (a) para essa energia. 19) Uma partı́cula de massa m é repelida da origem por uma força inversamente proporcional ao cubo de sua distância à origem. Escreva e resolva a equação do movimento, considerando que a partı́cula está inicialmente em repouso a uma distância x 0 da origem. Apêndice A Sistemas de Coordenadas A.1 Coordenadas Cartesianas (x, y, z) Z (x,y,z) i r k z k i X j y x j Y Figura A.1: O sistema de coordenadas cartesianas (x, y, z) A.1.1 Posição, Velocidade, Aceleração, etc... r v a dV r = = = = = xi + yj + zk ẋ i + ẏ j + ż k ẍ i + ÿ j + z̈ k dx dy dz (x2 + y 2 + z 2 )1/2 28 (A.1) (A.2) (A.3) (A.4) (A.5) A.1.2 Gradiente e Laplaciano de uma função escalar ϕ = ϕ(x, y, z) ∂ϕ ∂ϕ ∂ϕ i+ j+ k ∂x ∂y ∂z ∂ 2ϕ ∂ 2ϕ ∂ 2ϕ + 2 + 2 ∇2 ϕ(x, y, z) = ∂x2 ∂y ∂z ∇ϕ(x, y, z) = A.1.3 (A.6) (A.7) Divergente, Rotacional e Derivada de um vetor A = Ax i + Ay j + Az k ∂Ax ∂Ay ∂Az + + ∂x ∂y ∂z ∂Ax ∂Az ∂Ay ∂Ax ∂Az ∂Ay i+ j+ k − − − ∇×A = ∂y ∂z ∂z ∂x ∂x ∂y dA dAx dAy dAz = i+ j+ k dt dt dt dt ∇·A = A.1.4 (A.8) (A.9) (A.10) A Regra da Mão Direita para o produto vetorial a b indicador médio b polegar (C) Copyright 2003 Luciano Camargo Martins a Figura A.2: A regra da mão direita para o produto vetorial. O produto vetorial a × b é normal ao plano definido pelos vetores a e b. A.2 Coordenadas Cilı́ndricas (ρ, ϕ, z) Z k uϕ uρ r k i X uϕ j y k z ρ ϕ uρ x Y Figura A.3: O sistema de coordenadas cilı́ndricas (ρ, ϕ, z) A.2.1 Posição, Velocidade, Aceleração, etc... r v a uρ uϕ d uρ dϕ d uϕ dϕ (x, y, z) (ρ, ϕ, z) r dV = = = = = ρ uρ + z k ρ̇ uρ + ρϕ̇ uϕ + ż k (ρ̈ − ρϕ̇2 ) uρ + (ρϕ̈ + 2ρ̇ϕ̇) uϕ + z̈ k cos ϕ i + sin ϕ j − sin ϕ i + cos ϕ j (A.11) (A.12) (A.13) (A.14) (A.15) = uϕ (A.16) = − uρ (A.17) = = = = (A.18) (A.19) (A.20) (A.21) (ρ cos ϕ, ρ sin ϕ, z) ((x2 + y 2 )1/2 , arctan(y/x), z) (ρ2 + z 2 )1/2 ρ dρ dϕ dz A.2.2 Gradiente e Laplaciano de uma função escalar f = f (ρ, ϕ, z) 1 ∂f ∂f ∂f uρ + uϕ + k ∂ρ ρ ∂ϕ ∂z ∂2f ∂f 1 ∂2f 1 ∂ 2 ρ + 2 2+ 2 ∇f = ρ ∂ρ ∂r ρ ∂ϕ ∂z ∇f = A.2.3 (A.22) (A.23) Divergente, Rotacional e Derivada de um vetor A = Aρ uρ + Aϕ u ϕ + A z k 1 ∂Aϕ ∂Az 1 ∂ (ρAρ ) + + (A.24) ρ ∂ρ ρ ∂ϕ ∂z 1 ∂Az ∂Aϕ ∂Aρ ∂Az ∂Aρ 1 ∂ ∇×A = − − (ρAϕ ) − uρ + uϕ + k (A.25) ρ ∂ϕ ∂z ∂z ∂ρ ρ ∂ρ ∂ϕ dAϕ dAz dAρ dϕ dϕ dA uρ + uϕ + = − Aϕ + Aρ k (A.26) dt dt dt dt dt dt ∇·A = A.3 Coordenadas Esféricas (r, θ, ϕ) Z u r uθ uφ u !#" #" #!#! !!" ##!"!##! !" #" #! #!#! %" $%$"%%$%$ %" %$" %$%$ $" %" $ $ r uφ θ r k i φ y uθ r z j &" &'" &'" &'" &"'" & '" & '" & '&'& x Y X Figura A.4: O sistema de coordenadas esféricas (r, θ, ϕ) A.3.1 Posição, Velocidade, Aceleração, etc... r = r ur v = ṙ ur + rθ̇ uθ + r sin θ ϕ̇ uϕ a = (r̈ − rθ̇2 − r sin2 θ ϕ̇2 ) ur + (rθ̈ + 2ṙ θ̇ − rϕ̇2 sin θ cos θ) uθ + (rϕ̈ sin θ + 2ṙϕ̇ sin θ + 2r θ̇ ϕ̇ cos θ) uϕ (x, y, z) = (r sin θ cos ϕ, r sin θ sin ϕ, r cos θ) (r, θ, ϕ) = ((x2 + y 2 + z 2 )1/2 , arctan((x2 + y 2 )/z), arctan(y/x)) ur = sin θ uρ + cos θ k = sin θ cos ϕ i + sin θ sin ϕ j + cos θ k onde: sin θ = ρ/(ρ2 + z 2 )1/2 e cos θ = z/(ρ2 + z 2 )1/2 uθ = − sin θ k + cos θ uρ = cos θ cos ϕ i + cos θ sin ϕ j − sin θ k dV = r2 sin θ dr dθ dϕ (A.27) (A.28) (A.29) (A.30) (A.31) (A.32) (A.33) (A.34) A.3.2 Gradiente e Laplaciano de uma função escalar f = f (r, θ, ϕ) 1 ∂f 1 ∂f ∂f ur + uθ + uϕ ∂r r ∂θ r sin θ ∂ϕ 2 ∂ 1 ∂f 1 ∂ f 1 ∂ 2 ∂f 2 r + 2 sin θ + 2 2 ∇f = 2 r ∂r ∂r r sin θ ∂θ ∂θ r sin θ ∂ϕ2 ∇f = A.3.3 (A.35) (A.36) Divergente e Rotacional e um vetor A = Ar ur + Aθ uθ + Aϕ uϕ 1 ∂ 1 ∂Aϕ 1 ∂ 2 (r Ar ) + (sin θ Aθ ) + 2 r ∂r r sin θ ∂θ r sin θ ∂ϕ ∂ ∂Aθ 1 ur + (sin θ Aϕ ) − ∇×A = r sin θ ∂θ ∂ϕ 1 ∂Ar 1 ∂ 1 ∂ ∂Ar + uϕ − (rAϕ ) uθ + (rAθ ) − r sin θ ∂ϕ r ∂r r ∂r ∂θ dAr dθ dϕ dA = − Aθ − Aϕ sin θ ur + dt dt dt dt dAθ dθ dϕ + uθ + + Ar − Aϕ cos θ dt dt dt dAϕ dϕ dϕ + Ar sin θ + Aθ cos θ + uϕ dt dt dt ∇·A = (VETOR31.TEX Revisão 3.1 de 25 de janeiro de 2005) (A.37) (A.38) (A.39) Referências Bibliográficas [1] SYMON, K. R. Mecânica . 2 ed., Rio de Janeiro: Campus, 1986. [2] ALONSO, M.; FINN, E. J. Edgard Blücher, 1972. Fı́sica: um curso universitário: mecânica. vol. 1, São Paulo: [3] HALLIDAY, D.; RESNICK, R.; WALKER, J. ed. 4, Rio de Janeiro: LTC, 1996. Fundamentos de Fı́sica: Mecânica. vol. 1, [4] HALLIDAY, D.; RESNICK, R.; WALKER, J. ed. 4, Rio de Janeiro: LTC, 1996. Fundamentos de Fı́sica: Mecânica. vol. 2, [5] KITTEL, C.; KNIGHT, W.; RUDERMAN, M. A. Curso de Fı́sica de Berckeley: mecânica. vol. 1, São Paulo: Edgard Blücher, 1973. [6] KIBLE, T. W. B. Mecânica Clássica. São Paulo: Polı́gono, 1970. [7] MARION, J. B.; THORNTON, S. T. Classical Dynamics of Particles and Systems. 4 ed., Harcourt Brace Jovanovich College Publishers, 1995. 34
Baixar