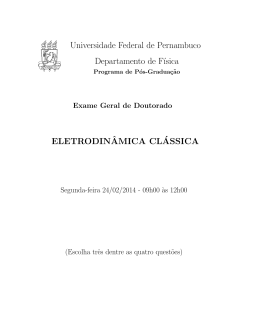
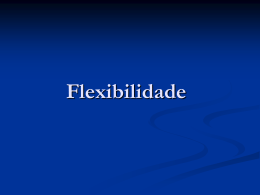
CONTROLE FEEDFORWARD ADAPTATIVO ATRAVÉS DE ESTIMAÇÃO DE AMPLITUDE PARA UMA MÁQUINA ELETROMECÂNICA DE ENSAIO DE FADIGA Alessandro Santos de Lima∗, Diego Pereira-Dias∗, Alessandro Jacoud Peixoto†, Liu Hsu† ∗ LNDC/COPPE/UFRJ Av. Pedro Calmon, s/n, Rio de Janeiro, RJ, Brasil † Programa de Eng. Elétrica , COPPE/UFRJ, Rio de Janeiro, Brasil Emails: [email protected], [email protected], [email protected], [email protected] Abstract— This paper presents the design of an adaptive feedforward controller in order to enlarge the range of applicability of the sinusoidal waveform force signals for an electromechanical fatigue testing machine. Once the feedforward term depends on uncertain parameters of the system, identification or adaptation are required. As the main objective is to guarantee a given precision for the output force waveform, an efficient method to measure the sinusoid amplitude continuously is needed. The key idea is to use a second order linear filter based on an adaptive notch frequency estimator. A Hammerstein dynamic model was established relating the most relevant feedforward parameter and the estimated waveform amplitude. Based on this model, an adaptive control law is proposed and then theoretically justified. The resulting controller was successfully tested by simulation and real experiments. Keywords— Adaptive feedforward; amplitude estimation; fatigue testing machines, Hammerstein model Resumo— Este artigo apresenta o projeto de um controle antecipatório adaptativo (adaptive feedforward) para ampliar a faixa de frequência de aplicabilidade de uma máquina eletromecânica de testes de fadiga visando ensaios em que a força aplicada ao corpo de prova apresente forma de onda senoidal. Como o termo antecipatório (feedforward) envolve parâmetros incertos da planta, a identificação paramétrica ou adaptação se mostra necessária. Como o objetivo principal é garantir a precisão do sinal de força aplicado à amostra de teste, é necessário dispor de um método para estimar continuamente a amplitude da onda de força gerada. A ideia mestra para tal foi utilizar um filtro linear de segunda ordem inspirado de um conhecido estimador de frequência por filtro notch. Um modelo de Hammerstein foi estabelecido relacionando o parâmetro mais relevante do termo f eedforward com a amplitude da senoide de força estimada. Com este modelo, propôs-se então uma lei de adaptação teoricamente justificada. A validade do método foi verificada tanto por simulação como experimentalmente. Palavras-chave— 1 feedforward adaptativo; estimação de amplitude; ensaio de fadiga, modelo de Hammerstein Introdução O projeto de máquinas e estruturas requer conhecimento das propriedades dos materiais a serem utilizados no projeto (de Lima, 2014; Pereira-Dias et al., 2013; Callister, 2010). Quando estes materiais são submetidos a diferentes tipos de carregamentos, podem ocorrer eventuais falhas, principalmente devido a fadiga. Desta forma a necessidade de caracterizar sistematicamente as propriedades dos materiais fomentou a indústria a investir no desenvolvimento de máquinas de ensaio de fadiga capazes de aplicar carregamentos cı́clicos a um corpo de prova (CP) de um dado material, com geometria padronizada, assegurando uma tolerância de precisão reduzida (ASTM-E647-08, 2008) – erro máximo de 2% tanto com relação à força máxima desejada quanto em relação à amplitude de pico-a-pico do perfil de força desejado. Em particular, o Laboratório de Ensaios NãoDestrutivos, Corrosão e Soldagem da Universidade do Rio de Janeiro (LNDC/COPPE/UFRJ) está desenvolvendo máquinas de ensaio, inclusive para ensaios em meio corrosivo (ensaios corrosãofadiga). Para isso, deve dispor de sensores adequados e algoritmos de alto desempenho capazes de realizar os ensaios durante longos perı́odos de tempo (de Lima, 2014). O desenvolvimento de máquinas para ensaios de fadiga iniciou-se com o aprimoramento das técnicas de controle para atuadores servo-hidráulicos pois apresentam alta resistência mecânica e durabilidade (Pereira-Dias, 2014; Jelali and Kroll, 2003; Merritt, 1967). Esquemas baseados em observador e um controlador backstepping foi proposto em (Nakkarat and Kuntanapreeda, 2009), enquanto o controle por aprendizado neuro-fuzzy, armazenando os pontos ótimos de reversão para aumentar a frequência máxima de ensaio, foi explorado em (Sánchez et al., 2012). Uma alternativa recente de controle foi proposta em (PereiraDias et al., 2014) onde a amplitude e o nı́vel médio da força no CP foram estimados por um método baseado em modulação/demodulação, reduzindo o problema de rastreamento a dois subproblemas de regulação. Apesar dos resultados satisfatórios, a técnica requer o conhecimento da fase da onda medida. Buscando uma solução alternativa às máquinas comerciais eletromecânicas de elevado custo e às máquinas hidráulicas de difı́cil controle, o LNDC construiu uma máquina eletromecânica para ensaios de fadiga de baixo custo e acionada por um motor elétrico rotativo. Esta máquina foi explorada em (de Lima, 2014), utilizando uma técnica de controle clássico (realimentação com ação antecipatória) e técnicas de controle por aprendizagem (que exploram a natureza repetitiva do perfil de força desejado). Todavia, ambas as técnicas apresentaram limitações: a primeira devido à necessidade de uma identificação precisa dos parâmetros da planta e as demais devido a complexidade dos algoritmos de controle por aprendizagem. Neste trabalho, mantendo a simplicidade do esquema de controle e um assegurando rastreamento aceitável do perfil de força, dentro das normas dos ensaios de fadiga, na presença de incerteza paramétrica citadas acima, a lei de controle clássica baseada em realimentação (feedback ) e ação antecipatória (feedforward ), introduzida em (de Lima, 2014), foi modifica por meio da adaptação de um parâmetro chave da parcela antecipatória da lei de controle: a estimativa do ganho de alta frequência da planta. A adaptação é função de uma estimativa da amplitude de oscilação do sinal de força aplicado ao CP, obtida por um filtro linear de segunda ordem inspirado no estimador de frequência por filtro notch de (Hsu et al., 1999). Os resultados experimentais ilustram a eficácia da estratégia de controle apresentada e permite ensaios em frequências mais elevadas do que no caso não-adaptativo. 2 Formulação do Problema A máquina eletromecânica para ensaio de fadiga é composta basicamente por um motor elétrico de corrente contı́nua sem escovas (brushless) e pelo seu respectivo acionador de potência (driver ), ver Fig. 1(A), que aplicam um carregamento ao corpo de prova. Uma transmissão tipo parafuso de rosca sem fim converte o movimento rotacional em movimento translacional (direção vertical), como ilustrado na Fig. 1(B). A extremidade do segundo eixo (translação) é então conectada a um corpo de prova (CP), Fig. 1(D), por meio de garras e pinos. O deslocamento no eixo vertical, portanto, fornece a compressão ou a tração do CP, resultando num sinal de força o qual é medido através de uma célula de carga (Fig. 1 (C)). O objetivo da máquina de teste de fadiga é aplicar um perfil temporal de força de tração desejada yd (t) com forma de onda senoidal do tipo: yd (t) = ad sen(ωt) + bd , ω = 2πf , (1) sendo f a frequência, ad a amplitude e bd o valor médio. Para atingir a precisão desejada, é necessário projetar uma lei de controle de força adequada mesmo na presença de incertezas e variações de caracterı́sticas mecânicas do CP. Figura 1: Interligação dos componentes da máquina eletromecânica para ensaio de fadiga. 2.1 Modelagem do Sistema O acionador de potência inclui uma malha interna de controle de velocidade angular (θ̇) suficientemente rápida de modo que a relação entre a tensão aplicada e a velocidade angular pode ser modelada por uma função de transferência de primeira ordem com pequena constante de tempo τ e ganho k1 . Obviamente, a integral da velocidade angular resulta na posição angular do motor (θ). Desprezando-se as não-linearidades provenientes das engrenagens do sistema de transmissão/redução (por exemplo, folgas de engrenagem – backlash), pode-se considerar que o deslocamento angular (θ) e o deslocamento linear vertical (x) estão relacionados linearmente por meio de uma constante de proporcionalidade (k2 ). Por fim, desde que o CP esteja dentro do regime linear elástico, o mesmo pode ser modelado como uma mola ideal com constante de elasticidade k3 , conferindo também uma relação linear entre força (y) e posição (x). Sendo assim, o sistema pode ser representado pelo seguinte modelo linear: τ ÿ + ẏ = km u , (2) sendo km = k1 k2 k3 , a tensão elétrica da armadura do motor (u) considerada como sinal de controle (variável manipulada) e a força (y) aplicada ao CP como sinal de saı́da do sistema (variável controlada). 3 Lei de Controle para Rastreamento com F eedforward Notando que a planta em malha aberta apresenta um polo estável e outro na origem (integrador), um simples controlador proporcional estabiliza o sistema em malha fechada. Entretanto, a dificuldade é assegurar o rastreamento da trajetória com uma dada precisão desejada. Para tal, um termo antecipatório (feedfoward ) torna-se necessário. Conforme será visto em seguida, tal termo depende da primeira e segunda derivadas temporais da trajetória desejada. Considerando o erro de rastreamento como sendo e = y − yd , em que yd é o sinal de referência de força, as derivadas temporais de e são dadas por ė = ẏ − y˙d e ë = ÿ − y¨d . Portanto, somando e subtraindo τ ÿd + ẏd o sistema descrito em (2) pode ser reescrito como: τ (ÿ − y¨d ) + (ẏ − y˙d ) + τ y¨d + y˙d = km u(t) . (3) Consequentemente, a dinâmica do erro de rastreamento é dada por: τ ë + ė + τ y¨d + y˙d = km u(t) . (4) Agora, considerando a lei de controle u(t) = −v + uf f , km (5) com termo antecipatório (feedforward) uf f (t) = τ y¨d + y˙d , km (6) a equação do erro é dada por τ ë + ė + v = 0, (7) sendo v um sinal de controle auxiliar (feedback). É evidente que uma simples realimentação proporcional v = kp e é suficiente para fazer com que o erro tenda assintoticamente para zero, regido por uma dinâmica de um sistema de segunda ordem. O ajuste do ganho kp pode ser feito por métodos convencionais que assegurem banda passante e transitório adequados. Note-se que para baixas frequências de yd , as derivadas temporais podem ser desprezadas o que torna o termo antecipatório (6) dispensável. Os resultados simulados e experimentais desta lei de controle confirmam essa conjectura para baixas frequências. Na realidade, uma simples realimentação proporcional atende às especificações de projetos para frequências até 1Hz, apesar das imperfeições no rastreamento causadas pelas nãolinearidades envolvidas. Entretanto para frequências superiores, as especificações de precisão são violadas. Além disso, nos testes de fadiga é imperativo que não ocorra overshoot. Desse modo, não é possı́vel tentar reduzir o erro de rastreamento por aumento do ganho kp além de um certo valor limite. Para frequências mais altas, a utilização do termo antecipatório (6) permite, em tese, evitar esse problema e atingir a precisão de controle desejada. É bem conhecido da literatura clássica de controle que para se atingir a precisão de rastreamento desejada o controle antecipatório requer o conhecimento dos parâmetros do sistema. No presente caso, os parâmetros incertos são km e τ . Pequenos erros na identificação destes parâmetros podem levar a erros superiores aos limites permitidos, sobretudo para km , pois τ pode ser identificado mais facilmente além de se manter praticamente constante. Além disso, o valor de km é função das caracterı́sticas do corpo de prova e do tamanho de sua trinca (crescente ao longo de um ensaio). Logo, o parâmetro km apresenta variações no decorrer de um mesmo ensaio ou entre diferentes ensaios. Assim sendo, visando-se a utilizar toda a faixa de frequências atingı́vel pela máquina de ensaio de fadiga, é conveniente introduzir uma forma de adaptação do controle diante da incerteza de km . 4 Feedforward Adaptativo para Redução do Erro de Amplitude Uma implicação direta do erro de estimação de km é a atenuação ou amplificação da amplitude da senoide de saı́da com relação à onda de referência, além de introdução de erro de fase. Caso o valor estimado (k̂m ) seja maior do que o valor de km , o sistema responde com uma onda atenuada, ao passo que valores subestimados de k̂m resultam em ondas de saı́da com amplitudes amplificadas. Como já foi enfatizado, o sobrepasso na amplitude da onda de saı́da é inaceitável pois poderia acarretar na plastificação mecânica do CP, violando o regime elástico do material. Assim, uma estratégia natural é iniciar a estimativa de km com valores altos e a partir destes valores fazer com que k̂m convirja para km . É claro que para controlar a amplitude do sinal de força é necessário medir a amplitude da onda de resposta da planta. Em (PereiraDias et al., 2014) é proposta uma forma de medição de amplitudes de senoides por modulação/demodulação. Apesar dos resultados positivos, esta técnica requer o conhecimento da fase da onda medida. Para evitar essa dificuldade e obter a amplitude de modo contı́nuo (on-line) tiramos proveito do estimador de frequência de uma onda senoidal baseado em um filtro notch. Em (Hsu et al., 1999), o estimador de frequência é um filtro não linear de 3a ordem. Neste trabalho, sendo a frequência da senoide conhecida, apenas um filtro linear de segunda ordem é necessário para estimar a amplitude de uma senóide de frequência dada de maneira contı́nua. Esse método de medição é uma das inovações do presente trabalho e se mostrou bastante adequado para atingir nossos objetivos de adaptação do parâmetro km . Cabe salientar que a solução para rastreamento baseada em controle adaptativo com ação antecipatória é uma solução clássica da literatura de Controle Adaptativo (Butler, 2013). Embora pareça possı́vel utilizar a abordagem clássica de controle adaptativo utilizando (5)-(6), fixando kp e aplicando adaptação paramétrica para a lei de antecipatória, optou-se por uma adaptação direta uf f (t) = τ y¨d + y˙d k̂m (t) , (8) sendo k̂m a estimativa de km obtida no que segue. 4.1 Estimador de Amplitude Para estimar continuamente a amplitude da senóide de saı́da (força), propõe-se utilizar o filtro notch adaptativo de (Hsu et al., 1999) dado por: ẍ1 + 2ζθẋ1 + θ2 x1 = η, (9) θ̇ = −γx1 (η − 2ζθẋ1 ), (10) sendo η = asin(ωt) o sinal senoidal a ser identificado com amplitude a (por simplicidade a fase é suposta nula) e frequência ω, θ a frequência estimada, x1 a saı́da do estimador e ζ e γ parâmetros de projeto que determinam o amortecimento e a velocidade de adaptação do estimador, respectivamente. Como no presente problema a frequência é conhecida (θ = ω), a amplitude pode ser estimada em regime permanente apenas pela primeira parte do filtro que é descrita pela seguinte realização canônica: ẋ1 = x2 , (11) ẋ2 = −ω 2 x1 − 2ζωx2 + η . (12) (controle proporcional com o feedforward) entre este ganho estimado k̂m do termo feedforward e a estimativa â da amplitude do sinal de força aplicada ao CP. Primeiramente o sinal do sensor de força é aplicado ao filtro (11)-(12), entrada η do filtro. A amplitude é então estimada continuamente de acordo com (13). Então, modificando k̂m em (8) por meio de uma sequência de degraus decrescentes obtém-se a resposta da Fig. 2, que sugere um comportamento semelhante ao de um sistema de primeira ordem, porém com ganho variável a cada degrau aplicado. Logo, fica aparente que um modelo razoável é o modelo de Hammerstein, conforme ilustra o diagrama de blocos da Fig. 3. E pela redução das variações da amplitude em resposta aos degraus conclui-se facilmente que a função Φ é monotonicamente decrescente e tende a um valor mı́nimo quando k̂m tende a infinito. De fato, nesse caso a compensação feedforward deixaria de existir, o que deixaria um erro de amplitude correspondente ao controlador proporcional sem feedforward. 5500 Amplitude Medida (N) baseada na estimativa k̂m . Um estudo comparativo entre essas abordagens é assunto para pesquisa futura. O termo antecipatório da lei de controle passa a ser redefinido por: 4500 4000 3500 3000 2500 2000 Note que a função de transferência de η para x1 é dada por G1 (s) = 1/(s2 + 2ζωs + ω 2 ). Portanto, o atraso de fase em regime permanente com respeito à entrada η = asin(ωt) é de −π/2, ou seja, x1 pode ser representado na forma x1 = −αcos(ωt) em regime permanente, sendo α o ganho de G1 (s) na frequência de entrada ω. Com isso, em regime permanente, tem-se que x2 = ẋ1 = αωsin(ωt) e ẋ2 = αω 2 cos(ωt) = −ω 2 x1 . Sendo assim, considerando (12) em regime permanente, a amplitude da entrada senoidal é então estimada por: q (13) â = 2ζω 2 x21 + (x2 /ω)2 . Obviamente, â → a quando o filtro (11)-(12) tende para o regime permanente, o que introduz um certo atraso na estimativa. 4.2 Modelo de Hammerstein: Ganho k̂m do Termo Antecipatório × Estimativa da Amplitude da Força â Como o ganho km do sistema é incerto, podendo até variar lentamente com o tempo, utiliza-se um ganho estimado k̂m no termo feedforward (8) no lugar de km . Pretende-se obter um modelo que descreva o comportamento em malha fechada k^m a^ 5000 0 10 20 30 40 Tempo (s) 50 60 Figura 2: Resultado de simulação. Resposta ao degrau em malha fechada (controle proporcional com o feedforward) entre o sinal k̂m do termo feedforward (8) e a estimativa â da amplitude do sinal de força (13). k̂m Φ(·) 1 τA s + 1 â Figura 3: Modelo de Hammerstein em malha fechada (controle proporcional com o feedforward) entre o sinal k̂m do termo feedforward (8) e a estimativa â da amplitude do sinal de força (13). 4.3 O Algoritmo de Adaptação Pretende-se adaptar em tempo real o ganho k̂m de (8) de modo que a amplitude de força desejada seja produzida pela máquina eletromecânica. A adaptação de k̂m (“identificação” de km ) é simplesmente obtida pela seguinte lei integral do erro de amplitude: ˙ k̂m = KI (ad − â) , KI > 0 , (14) sendo kI uma constante de projeto. A prova completa de estabilidade do sistema em malha 5 Simulações A prova de estabilidade para o algoritmo de adaptação da lei de controle encontra-se no Apêndice A. Entretanto, foram de grande utilidade as simulações numéricas para verificar o desempenho das respostas transitórias do controlador. Além disso, não dispondo ainda de um método sistemático de sintonia do controlador, as simulações permitem ajustar previamente os parâmetros através de tentativa e erro. O pacote Simulink do Matlab foi o ambiente escolhido para realizar as simulações necessárias. Como já foi observado anteriormente, o valor de k̂m0 deve ser bem superior ao valor real de km a fim de assegurar que a amplitude da resposta (a) inicie com valores atenuados com relação a amplitude de referência (ad ). Assim, valendo-se do valor de km obtido no processo de identificação da planta (em torno de 7000), decidiu-se utilizar k̂m (0) = 20000, ou seja, cerca de três vezes o valor identificado. As Figuras 4 e 5 apresentam os gráficos da convergência da estimação da amplitude. Os gráficos correspondem à adaptação de amplitude nas frequências de 1 e 10Hz, respectivamente. Como se pode observar, a convergência de amplitude é assegurada em ambos os casos, ratificando a aplicabilidade da lei adaptativa desenvolvida para as frequências de 1 a 10Hz. 3000 Amplitude (N) 2500 a ref. 2000 a medido 1500 1000 500 2500 a ref. a medido 2000 Amplitude (N) fechada, com o modelo de Hammerstein estabelecido experimentalmente, será conduzida por meio do critério de Popov e pelo Critério do Cı́rculo(Khalil, 2002), conforme demonstrado no Apêndice A. 1500 1000 500 0 0 5 10 15 20 25 Tempo (s) Figura 5: Resultados de simulação. Estimação da amplitude do sinal de força: senoide de 10Hz. também implementado nos experimentos com a planta real. O valor de 5s para o acionamento da chave foi suficiente para evitar o transitório em toda faixa de frequência na qual as simulações foram realizadas (1 a 10Hz). 6 Resultados Para implementação dos controladores aqui desenvolvidos, foi utilizada a linguagem de programação LabView e o equipamento CompactRIO (Reconfigurable Input-Output), fabricado pela National Instruments. Este dispositivo permite a programação de laços de controle utilizando tanto a tecnologia tempo real (Real Time – RT ) como FPGA (Field Programmable Gate Array). Com a utilização desta última, laços de controle de até 20kHz puderam ser implementados, permitindo a execução de leis de controle com alto desempenho. Conforme pode ser observado na Fig. 6, o rastreamento da senoide de força de frequência de 3.5Hz apresenta desempenho satisfatório em regime, validando o método adaptativo para frequências superiores a 1Hz. A Figura 7 demonstra o efeito da adaptação no rastreamento. Para frequências superiores a 3.5Hz, o sinal de controle apresentou saturação (fora da faixa ±10V ), o que compromete o desempenho do rastreamento. 0 0 5 10 15 20 Tempo (s) 25 30 35 40 8000 ad â Figura 4: Resultados de simulação. Estimação da amplitude do sinal de força: senoide de 1Hz. Cabe ressaltar que o estimador de amplitude apresenta um transitório inicial inaceitável para aplicação direta no sistema real. Para evitar os efeitos nocivos de tal transitório, foi adicionada uma chave liga/desliga na ação de adaptação, que permite aplicar o resultado da adaptação somente após um tempo de espera (dwell-time) conveniente, estabelecido por meio de simulação, evitando assim que a planta seja submetida a esse transitório inicial indesejável. Tal procedimento foi Amplitude (N) 7000 6000 5000 4000 3000 2000 1000 0 0 5 Tempo (s) 10 15 Figura 6: Resultados experimentais. Estimação da amplitude do sinal de força: senoide de 3.5Hz. Força Dejseda, Força Medida (N) Jelali, M. and Kroll, A. (2003). Hydraulic Servo-systems: modelling, identification, and control, Springer, London New York. yd 11000 y 10000 Khalil, H. (2002). Nonlinear systems, Prentice Hall, Upper Saddle River, N.J. 9000 Merritt, H. E. (1967). Hydraulic Control Systems, John Wiley & Sons, Inc., New York, USA. 8000 7000 Nakkarat, P. and Kuntanapreeda, S. (2009). Observer-based backstepping force control of an electrohydraulic actuator, Control Engineering Practice 17(8): 895–902. 6000 5000 0 5 Tempo (s) 10 15 Figura 7: Resultados experimentais. Rastreamento de força: senoide de 3.5Hz. 7 Conclusões Um controlador antecipatório adaptativo (adaptive feedforward ) foi desenvolvido para ampliar a faixa de frequência de aplicabilidade de uma máquina eletromecânica de testes de fadiga, considerando sinais de força com forma de onda senoidal aplicados ao corpo de prova. Adaptação paramétrica se mostrou necessária tendo em vista a incerteza da constante da mola que representa a rigidez do corpo de prova. Tal adaptação foi realizada com base na estimação contı́nua da amplitude da onda de força produzida sobre o corpo de prova. Para tal estimativa foi utilizado um filtro de segunda ordem inspirado em um estimador de frequência por filtro notch, desenvolvido anteriormente. Com base nos resultados de simulações e experimentos realizados conclui-se que a estratégia proposta é viável para ser utilizada em máquinas de ensaio de fadiga, obedecendo a restrição rigorosa de que a força real aplicada seja mantida dentro da faixa de ±2% de variação em torno da força desejada. Os testes experimentais satisfizeram tais especificações de ensaio para perfis de força com forma de onda senoidal com frequências variando de 1Hz a 3.5Hz e amplitudes de 2500N a 10kN. Agradecimentos Ao Laboratório de Ensaios Não-Destrutivos, Corrosão e Soldagem (LNDC/COPPE/UFRJ), CNPq e FAPERJ pelo apoio financeiro dado. Referências ASTM-E647-08 (2008). ASTM E647-08 – Standard Test Method for Measurement of Fatigue Crack Growth Rates, Annual Book of ASTM Standards, ASTM International Standard. Butler, H. (2013). Adaptive feedforward for a wafer stage in a lithographic tool, IEEE Transactions On Control Systems Technology 21(3): 875–881. Callister, W. D. (2010). Materials science and engineering : an introduction, John Wiley & Sons. de Lima, A. S. (2014). Iterative Learning Control and Repetive Control for Fatigue Testing Machines, Master thesis, Programa de Engenharia Elétrica - Federal University of Rio de Janeiro, Rio de Janeiro, RJ, Brasil. Hsu, L., Ortega, R. and Damm, G. (1999). A globally convergent frequency estimator, IEEE Trans. Automat. Contr. 44(4): 698–713. Pereira-Dias, D. (2014). Modeling, Identification, Simulation and Control of Hydraulic Actuated Fatigue Testing Machines, Master thesis, Programa de Engenharia Elétrica Federal University of Rio de Janeiro, Rio de Janeiro, RJ, Brasil. Pereira-Dias, D., Costa, R. R. and Peixoto, A. J. (2013). Control of hydraulic actuated fatigue testing machines, 22nd Internation Congress of Mechanical Engineering (COBEM2013), ABCM, Ribeirão Preto, SP, Brazil, pp. 9370– 9381. Pereira-Dias, D., Peixoto, A. J. and Costa, R. R. (2014). Modelling, identification and control positioning system of hydraulic actuated fatigue testing machine (in portuguese), XX Congresso Brasileiro de Automática, SBA, Belo Horizonte, MG, Brazil, pp. 859–866. Sánchez, E. C. M., Alva, J. G. C., Meggiolaro, M. A., de Castro, J. T. P. and Topper, T. H. (2012). Learning control and neuro-fuzzy learning control to increase the frequency of fatigue tests, ABCM Symposium Series In Mechatronics, Vol. 5, ABCM, Rio de Janeiro, RJ, Brasil, pp. pp. 231–244. A Prova de Estabilidade do Sistema em Malha Fechada com o Modelo de Hammerstein As equações diferencias que governam o sistema em malha fechada são dadas por: ( â˙ = τ−1 â − τ1 Φ(σ) , A A (15) σ̇ = KI (ad − â) . sendo que σ denota a estimativa k̂m , para simplificar a apresentação (ver Fig. 8). ad Σ −e KI s σ Φ( σ ) u 1 τA s + 1 â − Figura 8: Diagrama de blocos da malha fechada usando lei de adaptação integral (14) e modelo de Hammerstein entre as estimativas k̂m (= σ) e â. Portanto, a dinâmica do erro de amplitude e = â − ad , com ad constante pode ser descrita da seguinte forma: ė = 1 −1 e− [Φ(σ) − ad ] . τA τA (16) Definindo-se, σ̃ := σ −km e Φ2 (σ̃) := Φ(σ̃ +km )−Φ(km ), tem-se que Φ2 (0) = 0 e que Φ2 (·) é uma não-linearidade estática que pertence ao segundo e quarto quadrante, ou seja Φ2 ∈ (0, −kΦ ), com kΦ > 0. Portanto, lembrando que Φ(km ) = ad , nas novas coordenadas tem-se que : ė = τ−1 e − τ1 Φ2 (σ̃) e A A e σ̃ T , o sistema σ̃˙ = σ̇ = −KI e. Além disso, para x := do erro em malha fechada pode ser representado por: −1/τA 0 1/τA ẋ = x+ Φ2 (x2 ) , (17) −KI 0 0 0 1 x. x2 = (18) Interpretando pelo domı́nio da frequência tem-se a seguinte KI função de transferência auxiliar Gp (s) = s(τ s+1) . Note-se A que Φ2 ∈ (0, −kΦ ) está no setor negativo, logo KI deve ser negativo também. Pelo Critério de Popov conclui-se a estabilidade global assintótica, se Φ(·) for independente do tempo (Khalil, 2002). Todavia, pelo Critério do Cı́rculo pode-se ainda considerar Φ(·) variante no tempo, por exemplo, quando a constante elástica do corpo de prova varia com o crescimento da trinca. Nesse caso, como o diagrama de Nyquist de Gp está contido à direita da reta vertical passando por −τ.KI , devemos ter KI < 1/(kΦ τ ).
Baixar