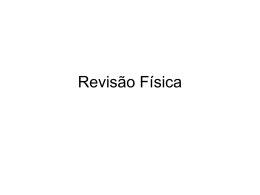
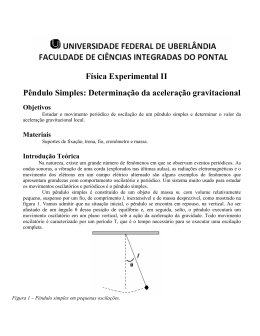
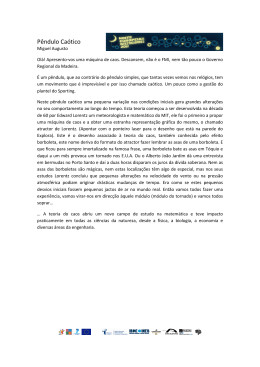
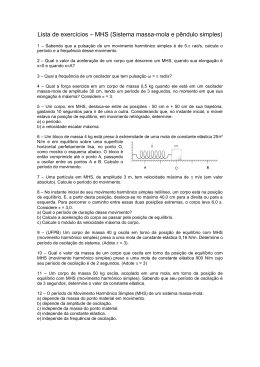
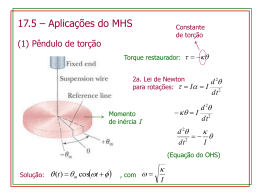
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 Movimento Harmônico Simples: Exemplos O protótipo físico do movimento harmônico simples (MHS) visto nas aulas passadas – um corpo de massa m preso a uma mola executando vibrações de pequenas amplitudes com força restauradora dada por F = –kx – é uma situação aproximada. Apesar disso, uma grande variedade de deformações de sistemas físicos, resultantes de trações, compressões, flexões ou torções (ou combinações delas) satisfaz, sob determinadas condições, a propriedade de que a força restauradora é proporcional ao deslocamento. Nesses casos, a equação diferencial resultante que descreve o movimento do sistema é formalmente idêntica à equação de movimento de um MHS, d 2x = &x& = − ω 2 x , 2 dt de maneira que o sistema se comporta como um oscilador harmônico simples. Veremos alguns exemplos desses casos nesta aula. 1 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 O Sistema Massa-Mola Vertical O caso do sistema massa-mola na horizontal já foi visto nas aulas passadas. Vejamos agora o mesmo sistema, só que oscilando na vertical (vamos considerar novamente apenas o caso de pequenas oscilações). A figura abaixo ilustra as situações importantes. Em A, a mola está suspensa verticalmente sem qualquer corpo preso à sua extremidade. O comprimento da mola é l. Em B temos a mola e um corpo de massa m preso à sua extremidade. A mola está esticada por um comprimento ∆l e a força restauradora feita por ela sobre o corpo é F = k∆l (aponta para cima, 2 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 que é a direção positiva do eixo x). O sistema está em equilíbrio, isto é, não oscila. Isto ocorre porque a força feita pela mola sobre o corpo se iguala ao peso do corpo: k∆l = mg. Em C o corpo está deslocado por uma distância x para cima em relação à posição de equilíbrio. A força feita pela mola sobre o corpo (ainda para cima, pois a mola continua esticada) é agora menor; seu valor é F = k(∆l – x). A força resultante sobre o corpo é Fr = k(∆l – x) – mg = – kx. A força resultante aponta para baixo e é proporcional ao deslocamento x do corpo em relação ao equilíbrio. Esta situação é formalmente idêntica à do sistema massa-mola na horizontal com a mola comprimida por x. Em D o corpo está deslocado por uma distância x para baixo em relação à posição de equilíbrio. A força feita pela mola sobre o corpo (novamente para cima, pois a mola continua esticada) é maior do que antes, valendo F = k(∆l + x). A força resultante sobre o corpo é Fr = k(∆l + x) – mg = kx. A força resultante aponta para cima e é proporcional ao deslocamento x do corpo em relação ao equilíbrio. Esta situação é formalmente idêntica à do sistema massa-mola na horizontal com a mola esticada por x. 3 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 Concluímos, portanto, que um corpo de massa m preso a uma mola vertical de constante k e realizando pequenas oscilações em relação à posição de equilíbrio do sistema massa-mola executa um MHS de frequência angular ω = k m , como no caso do sistema oscilando na horizontal. O Pêndulo de Torção Outro sistema que se comporta como um oscilador harmônico é o pêndulo de torção (figura abaixo). Consideremos um corpo suspenso por um fio (de metal ou qualquer outro material elástico) de maneira que a linha OC passe pelo seu centro de massa. Quando o corpo é girado por um pequeno ângulo θ em relação ao equilíbrio, o fio sofre uma torção e passa a exercer 4 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 sobre o corpo um torque restaurador τ que é bem descrito pela lei de Hooke: o torque se opõe ao deslocamento e tem módulo dado por τ = − Kθ (1) onde K é o chamado módulo de torção do fio, que depende do material do qual é feito o fio, da sua grossura e do seu comprimento. Se I for o momento de inércia do corpo em relação ao eixo OC, a equação de movimento (lembre-se de Física I) é d 2θ τ = Iα = I = I θ&& . 2 dt (2) Combinando as equações (1) e (2): I θ&& = − K θ ⇒ θ&& + K θ ⇒ 0. I (3) Esta é a equação de um oscilador harmônico simples com freqüência angular ω2 = K . I (4) A frequência das oscilações é f = ω 1 = 2π 2π K I e o período é 5 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 T = 1 = 2π f I K . (5) O movimento oscilatório é descrito pela solução de (3), θ ( t ) = Θ cos (wt + ϕ 0 ) , (6) onde Θ é a amplitude angular das oscilações. O Pêndulo Simples O pêndulo simples é outro modelo idealizado da física. Ele consiste de um corpo de massa m preso a um fio de massa desprezível e comprimento l. Supõe-se que o corpo realiza pequenos deslocamentos angulares sobre uma circunferência de raio l em torno da posição de equilíbrio (posição vertical, com θ = 0). A figura acima ilustra o modelo. Há duas forças atuando sobre o corpo, a tensão T e o peso mg. 6 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 Como se faz geral em problemas de mecânica que envolvem rotação, pode-se decompor as forças em suas componentes tangencial e radial. A única componente tangencial é a componente do peso ao longo da direção tangencial, Fθ = − mg sen θ . (7) O sinal negativo decorre do fato de que a direção positiva é a que se afasta da vertical ao longo da circunferência. As componentes radiais são a própria tensão e a componente do peso ao longo da direção radial. Como o corpo não se move na direção radial, essas duas componentes são iguais e de sentidos contrários (veja a figura), T = mg cos θ . (8) Esta última equação nos permite calcular o valor da tensão T para qualquer valor de θ. A equação que nos interessa aqui é a (7). O deslocamento do corpo ao longo da trajetória em relação ao repouso é medido por s = lθ . Dessa maneira, a aceleração tangencial do corpo é 7 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 d 2s d 2θ aθ = =l . dt 2 dt 2 (9) Multiplicando (9) por m para se ter a força tangencial e igualando a (7) obtemos a equação de movimento: d 2θ ml = − mg sen θ , dt 2 ou d 2θ g + sen θ = 0 . dt 2 l (10) Esta equação é diferente da equação do oscilador harmônico simples, pois a força restauradora não é proporcional ao deslocamento angular θ, mas ao seno de θ. Quando se mede o ângulo θ em radianos, porém, temos que, para ângulos pequenos, sen θ ≈ θ . (11) Por exemplo, para θ = 0,1745 rad (= 10o), sen θ = 0,1736. Notem que os dois valores são muito próximos; o erro relativo vale (0,1745 – 0,1736)/0,1736 = 0,005 (~ 0,5%). Portanto, para pequenos desvios em relação à posição de equilíbrio, a equação de movimento do pêndulo simples pode ser aproximada por, 8 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 d 2θ g + θ = 0, dt 2 l (12) com θ medido em radianos. Esta é a equação de um MHS com frequência angular ω = A freqüência e g . l (13) o período das pequenas oscilações são, respectivamente, f = ω 1 = 2π 2π g l (14) T = 1 = 2π f l g . (15) e Notem que o período T das oscilações do pêndulo simples não depende da amplitude das oscilações (desde que elas sejam pequenas), mas apenas do comprimento do pêndulo l. Este fato foi observado por Galileu (1564-1642) em 1602 e constitui o que ele chamou de isocronismo do pêndulo. Em cartas a amigos, Galileu sugeriu que o isocronismo do pêndulo simples para pequenas oscilações poderia ser usado para a construção de instrumentos de medida de tempo. 9 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 Por exemplo, supondo que a intensidade do campo gravitacional é a mesma para todos os pontos da superfície da Terra e vale g = 9,8 m/s2, o comprimento l do pêndulo para que o seu período T seja de 1 segundo pode ser calculado a partir de (15) como: gT l= 4π 2 2 ( 9 ,8 m/s 2 )1 = = 0 , 248 m , 4π 2 ou seja, um pêndulo de comprimento 24,8 cm que oscile com amplitudes menores que 10o possui período de aproximadamente 1 segundo com erro da ordem de 0,5%. Em 1603, um dos amigos de Galileu, o médico Santorio Santorio, passou a usar um pendulo simples (que ele chamou de pulsilogium) para medir o pulso de seus pacientes. A aplicação mais importante do isocronismo do pêndulo, no entanto, veio em 1656, após a morte de Galileu, com a construção do primeiro relógio de pêndulo pelo físico holandês Christiaan Huygens (1629-1695). A figura abaixo mostra o esquema do primeiro relógio de pêndulo construído por Huygens (a figura foi tirada do site http://www.17centurymaths.com/contents/huygens/horologiumpart1.pdf, que contém a tradução para o inglês do livro de Huygens sobre o relógio de pêndulo Horologium Oscillatorium). 10 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 A energia cinética do pêndulo simples é K = 1 mv 2 . 2 A velocidade do pêndulo é v= ds d (l θ ) dθ = =l . dt dt dt Substituindo esta expressão da velocidade na equação para a energia cinética, 2 1 dθ K = ml 2 . 2 dt (16) Para calcular a energia potencial U do pêndulo, vamos considerar que a posição em que U é nula é a posição de equilíbrio θ = 0. Desta forma, a energia potencial pode ser calculada como o negativo do 11 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 trabalho realizado pela força restauradora para levar o pêndulo de θ = 0 até um valor de θ qualquer diferente de zero: θ θ θ 0 0 0 U = −W 0 → θ = − ∫ Fθ ds = − ∫ (− mg sen θ ′ )ld θ ′ = mgl ∫ sen θ ′d θ ′ ⇒ ⇒ U = mgl [− cos θ ′ ]0 . θ Ou seja, ⇒ U = mgl (1 − cos θ ) . (17) Observem que as equações (16) e (17) são absolutamente gerais para o pêndulo simples, isto é, elas valem mesmo quando não se faz a aproximação de pequenos ângulos. Se, no entanto, fizermos a aproximação de ângulos pequenos, sen θ ≈ θ , a energia potencial torna-se θ (θ ′) 2 ′ ′ U = mgl ∫ θ d θ = mgl . 2 0 0 θ Ou seja, U = 1 1 mgl θ 2 = m ω 2 l 2θ 2 2 2 (θ << 1) . (18) 12 5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 3 2010 A energia total (que se conserva) do pêndulo simples para pequenas oscilações é então: 2 1 1 dθ 2 2 2 E = K + U = ml 2 + mω l θ . 2 2 dt (19) Faça, como exercício, uma análise do movimento do pêndulo simples baseada nesta equação da mesma forma que a que foi feita na aula anterior para o movimento do sistema massa-mola. 13
Baixar