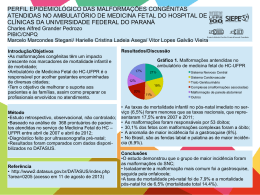
REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 19 Agricultura de Precisão com Rede de Sensores sem Fio Paulo Henrique Cruz Pereira∗‡ § , Alberto Colombo † , Marcelo Sampaio de Alencar, ‡ § Giovanni Francisco Rabelo† e Waslon Lopes ‡ § ∗ Centro Federal de Educação Tecnológica de Minas Gerais – CEFET/MG, Varginha, Brasil † Universidade Federal de Lavras – UFLA, Lavras, Brasil ‡ Universidade Federal de Campina Grande – UFCG, Campina Grande, Brasil § Instituto de Estudos Avançados em Comunicações – Iecom, Campina Grande, Brasil E-mails: [email protected],{acolombo, rabelo}@deg.ufla.br, {malencar, waslon}@iecom.org.br Resumo— Este artigo descreve uma aplicação de controladores lógico programáveis (CLP) em conjunto com inversores de frequência em sistemas de irrigação por pivô central com o objetivo de aumentar a eficiência do uso da energia elétrica, R utilizando redes ZigBee (802.15.4), Modbus-RTU e Compobus, para comunicação entre os equipamentos e sensores. Sabe-se que o aumento do consumo da energia elétrica no meio rural está diretamente associado ao desenvolvimento tecnológico da agricultura. Portanto, o emprego de modernas técnicas que otimizem o uso racional da energia elétrica é fundamental em todos as áreas de conhecimento. O experimento foi realizado no campus da Universidade Federal de Lavras (UFLA), dentro do programa de doutorado em Engenharia Agrı́cola, nos anos de 2008-2009, tendo apoio do CNPq e FAPEMIG. São apresentados a fundamentação, metodologia e resultados alcançados na execução do projeto implementado. Palavras-chave— Sistema de Irrigação Controlada, Eficiência Energética Rural, Sensores sem Fio, ZigBee I. I NTRODUÇ ÃO O aumento do consumo de energia elétrica no meio rural esta diretamente associado com o desenvolvimento tecnológico da agricultura. Como a oferta de energia elétrica é limitada, torna-se necessário incentivar o uso mais eficiente no meio rural. Os sistemas de irrigação do tipo pivô central são responsáveis por grande parte do consumo de energia elétrica. A energia consumida nesses sistemas é principalmente dirigida para o acionamento do conjunto motobomba. Uma utilização mais racional da energia consumida pelos conjuntos motobombas pode ser obtida pela adoção de práticas adequadas de projeto e manejo destes sistemas de irrigação. A viabilidade econômica do uso de inversores de frequência em sistemas de irrigação do tipo pivô central foi demonstrada em diversos estudos [1], [2], [3], [4] e [5]. No entanto, apesar da necessidade de aumentar a eficiência do uso da energia elétrica disponı́vel e das vantagens comparativas de algumas áreas irrigadas do Brasil, o incremento esperado na utilização destes equipamentos em sistemas de irrigação do tipo pivô central não tem sido observado. Nos sistemas de irrigação por pivô central o uso de inversores de frequência deve ser incentivado porque as unidades de bombeamento destes sistemas são geralmente dimensionadas para atender à máxima demanda de potência. Desta forma, esses sistemas apresentam condições para se obter uma redução substancial no consumo de energia elétrica com o uso de inversores de frequência. Atualmente, três fatores contribuem para a continuidade deste quadro de estagnação no uso de inversores de frequência em sistemas de irrigação: (i) as estratégias para controle dos inversores nos pivôs centrais ainda são um desafio para os profissionais da automação que atuam na área agrı́cola; (ii) existem discrepâncias entre valores esperados e valores realizados (observados) de redução no consumo de energia elétrica; e, (iii) são poucas as oportunidades de se observar equipamentos de irrigação do tipo pivô central operando com inversores de frequência. Este artigo tem como objetivo mostrar a viabilidade do uso do inversor de frequência na irrigação de precisão por pivô central mediante a instalação de um inversor de frequência, um controlador lógico programável (CLP) e o uso de rede de sensores sem fio (RSSF), realizada no pivô central existente no Campus da UFLA. Tal experimento objetivou ações que contribuam para eliminação dos três fatores restritivos, citados, com o uso da comunicação entre o inversor de frequência, o CLP e os diversos sensores instalados (pressão; ao longo na linha lateral do pivô central; e umidade de solo; espalhados na cultura de café irrigada). Para tal, foram utilizados os cabos previamente existentes para controle de energização do conjunto motobomba, utilizado pelo pressostato do pivô central (cabo normal de ligação com 2,5 mm2 ) e rede de sensores sem fio, padrão ZigBee (IEEE.802.4.15). Todos os parâmetros do inversor de frequência serão fornecidos pelo CLP ao longo da topografia do terreno onde o pivô central está instalado. A irrigação inicializa mediante a análise do sinal do sensor de umidade de solo, enviada ao CLP, por um rede sem fio. II. R EFERENCIAL T E ÓRICO Desde seu patenteamento em 1952 [6]; o pivô central popularizou-se em todo o mundo, sendo, atualmente o sistema de irrigação por aspersão de maior aceitação. Aplica-se a um amplo elenco de culturas, incluindo granı́feras, hortaliças, café, forrageiras e gramı́neas, estas, inclusive, em associação ao pastejo natural de animais criados extensivamente [7]. 20 REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 A velocidade de rotação da lateral móvel é determinada por um relé percentual, que se encontra instalado na caixa de controle da torre central do pivô e que comanda a velocidade da última torre [8]. A unidade de bombeamento é, normalmente, instalada próxima ao ponto de captação de água para o pivô central, e por uma adutora, é conduzira a água bombeada até o ponto fixo localizado no centro da área irrigada [1]. A introdução de inversores de frequência nas unidades de bombeamento, de acionamento elétrico, dos equipamentos de irrigação possibilita uma substancial redução no consumo de energia [2] e [9]. Para o caso particular dos equipamentos de irrigação do tipo pivô central, a economia de energia obtida com a utilização de inversores de frequência tem sido alvo de diversos estudos [1], [2], [3], [4] e [5]. As aplicações ambientais têm se destacado no contexto das redes de sensores sem fio. O monitoramento da biodiversidade em um ecossistema se torna muito mais confiável em virtude do funcionamento desses sensores, que operam sem a necessidade de fios espalhados por plantações, florestas, rios etc. Desta maneira, o acompanhamento de espécies animais e de desastres naturais (incêndios florestais, grandes secas, entre outros) pode ser adequadamente analisados pelas autoridades [10], [11] e [12]. Algumas aplicações com animais podem ser destacadas, como o emprego de RSSFs para a contagem de pássaros [13]; ou para o monitoramento de zebras [14] dispersas em seu habitat; no rastreamento de rebanhos de cabras [15] ou de gado [16] e [17]; e na criação de frangos de corte [18]. No que diz respeito ao estudo das condições climáticas de uma determinada região, há trabalhos descrevendo a atuação de redes de sensores em estações meteorológicas [19] e na prevenção de tempestades de areia [20]. Um sistema de monitoramento das condições climáticas de vinı́colas situadas no estado de Washington – EUA é descrito em [21]. A agricultura de precisão, contudo, é uma das principais áreas de pesquisa em redes de sensores sem fio nas aplicações ambientais. O estabelecimento de uma RSSF em uma fazenda ou plantação para monitorar variáveis relacionadas a estas culturas vem se destacado em diversos trabalhos cientı́ficos e aplicações práticas. Variáveis importantes para o manejo agrı́cola (como temperatura, pressão, umidade do solo e nı́vel de radiação solar) são os principais tópicos investigados na literatura [22], visando a otimização da irrigação e um maior benefı́cio da atividade agrı́cola. Com a transmissão sem fio das informações para uma central ou estação de controle, podese gerenciar uma plantação de modo a reduzir o consumo de água e de energia elétrica, recursos que encarecem a produção agrı́cola. III. M ETODOLOGIA Este estudo foi desenvolvido para um pivô central, modelo Valley 4071-8000-VSN/2-94, existente no Campus da UFLA. A topografia da área onde o pivô opera, o comprimento de sua adutora e a distância entre a casa de bombas e o ponto do pivô podem ser visualizados na Figura 1. O inversor de frequência, da marca Omron, modelo 3G3RXA2150, foi instalado segundo o esquema ilustrado na Figura 2, Figura 1: Vista geral do sistema de irrigação do tipo pivô central (Valley 4071-8000-VSN/2-94), cotas do terreno em metros. na casa de bomba localizada nas proximidades do reservatório de água. A estratégia de controle dos parâmetros de controle do inversor foi realizada por um controlador lógico programável, marca Onrom, modelo CPIH-X40DT1-D, instalado próximo ao ponto do pivô, e os parâmetros foram enviados até a casa de bomba por meio de um cabo enterrado, conforme mostrado nos esquemas das Figura 2 e Figura 3. Ressalta-se que todas as interligações foram realizadas utilizando os cabos PP 3x1,5 mm2 e não cabos especiais de redes de comunicação industriais, pois o objetivo foi verificar se os cabos já existentes nas instalações de um pivô central atenderiam às necessidades de comunicação, e visando a redução dos custos de instalação de campo para o produtor rural. O cabo de comunicação entre o CLP e o inversor, que já se encontrava instalado, iniciava com um cabo duplo, rı́gido e 2,5 mm2 , finalizando com 2 fios (um preto e outro azul) de 1,0 mm2 , o que leva a concluir que deveria haver emendas ao longo do cabo que se encontrava ao longo da linha da adutora do pivô central. A programação Ladder do CLP foi realizada com o programa proprietário da Omron, o aplicativo CX-One, em sua REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 21 modelo ZB-Pro-ZB-S2 (Figura 4), com antena RPSMA, e o sinal oriundo de um sensor de umidade de solo era acoplado a uma entrada analógica do módulo. Figura 4: Módulo XBee PRO ZB S2; XBP24-Z7SIT-004; Antena RPSMA. Os módulos XBee foram configurados com o software XCTU (Figura 5) e a programação do nó coordenador foi realizada com a utilização do Processing e a linguagem Java. Figura 2: Distribuição dos equipamentos na casa de bombas do pivô central (Valley 4071-8000-VSN/2-94) no qual foi desenvolvido o trabalho. Figura 5: Tela do software XCTU. Figura 3: Disposição dos equipamentos ao longo da lateral móvel do pivô central (Valley- 4071-8000-VSN/2-94). versão Trial. Os dados de placa do motor são: motor de indução – gaiola, trifásico, 60 Hz, 220/380/440 V, 50/28,9/25,6 A, 15 kW(20 CV), 3.540 rpm, marca WEG. A bomba apresenta os seguintes dados: tipo–BEK40–3, φ rotor 145. A rede de sensores sem fio foi construı́da mediante a utilização de módulos XBee, da marca Digi Internacional Inc., O esboço da disponibilização dos módulos XBee, na cultura irrigada, é apresentado na Figura 6. No ponto central do pivô e junto do CLP ficou o coordenador da rede sem fio, FFDprincipal, tendo ao seu redor e com espaçamentos de 18 m, os chamados FFDeixo (configurados como roteadores). Os FFDeixo não realizam leituras de sensores de umidade de solo, por uma questão de economia de custos de aquisição dos sensores. A partir dos FFDeixo, e com espaçamentos de 18 m, foram instalados os FFDeixo-leitura que, além de trabalharem como roteadores, também realizavam leituras dos sensores de umidade. Os RFDleitura foram instalados nas extremidades de cada eixo e com a função de leitura dos sensores de umidade de solo. Todos os dados dos sensores de umidade de solo eram transmitidos ao nó coordenador, FFDprincipal, que foi configurado em modo API. Ao receber cada quadro de dados, o coordenador analisava os dados e caso houvesse, pelo menos três sensores de umidade de solo, com nı́vel inferior a 360 mV, ele emitia um sinal digital de nı́vel alto ao CLP, para iniciar a irrigação. 22 REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 Hpα = hf + ∆E + rα .sα + Jr .Leq .Fr + Hs ; (2) em que: Hpα = carga de pressão requerida, na posição α, na base do ponto do pivô (mca); hf = perda de carga no tubo de subida do ponto do pivô (mca); ∆E = carga da altura de instalação dos emissores em relaçãoao solo (mca); rα = distância, na posição α, do ponto do pivô até o ponto de mı́nima pressão da lateral (m); sα = declividade da linha lateral na posição α; Jr = taxa de perda de carga no inı́cio da lateral (m.m−1 ); Leq = comprimento equivalente da linha lateral (m); Fr = fator adimensional de correção do cálculo da perda de carga até o ponto r; Hs = carga piezométrica da pressão mı́nima de serviço dos emissores (mca). Figura 6: Esboço do sistema de instalação dos XBee ao longo da área irrigada pelo pivô central. Os demais componentes XBee foram configurados em modo AT (configuração para comandos AT – attention). IV. D ETERMINAÇ ÃO DAS F REQU ÊNCIAS DO I NVERSOR A. Fundamentação Teórica Em sistemas de irrigação, do tipo pivô central, a movimentação da lateral provoca variação em sua elevação topográfica, resultando em diferentes requisitos de altura manométrica, conforme apresentado na Figura 1. A ausência de variação na demanda do valor de vazão requerida é obtida com o uso de válvulas reguladoras de pressão em cada emissor [23]. Essas válvulas evitam que as variações na elevação topográfica da linha lateral afetem a uniformidade de aplicação de água. Valiantzas e Dercas [24] desenvolveram uma fórmula para cálculo do fator de correção (Fr ) do cálculo da perda de carga até um ponto r da linha lateral do pivô central, que para o caso particular da Fórmula de Hazen-Williams assume o seguinte formato Fr = 3 5,15 0, 85 1, 85 r r rα + ; − . . Leq 3 Leq 5, 15 Leq (1) em que: Fr = fator adimensional de correção do cálculo da perda de carga até o ponto r; r = distância desde o ponto do pivô central (m); rα = distância, na posição α, do ponto do pivô até o ponto de mı́nima pressão da lateral (m); Leq = comprimento equivalente da linha lateral (m). De acordo com Azevedo [1], para cada posição α assumida pela linha lateral do pivô, a carga de pressão requerida na base do ponto do pivô (Hpα ) pode ser calculada pela seguinte fórmula Segundo Campana [2], a demanda de potência para acionamento da unidade de bombeamento será menor quando o pivô estiver irrigando a faixa de menor requisito de altura manométrica e a demanda de potência será máxima quando o pivô estiver irrigando a posição correspondente à maior altura manométrica. Alcântara [25] sugere que as modificações nas curvas caracterı́sticas das bombas centrı́fugas (vazão versus altura manométrica e vazão versus rendimento) resultantes de alterações nos valores de diâmetro e/ou de velocidade de rotação do rotor sejam modeladas através da adimensionalização dos valores de vazão e altura manométrica: λQ = Q φ3 .ω (3) g.H ; φ2 .ω 2 (4) e λH = em que: λQ = vazão bombeada adimensional; Q = vazão bombeada (m3 .s−1 ); φ = diâmetro do rotor (m); ω = velocidade angular do rotor (rad.s−1 ); λH = altura manométrica adimensional; H = altura manométrica total (m). Azevedo [1] utilizou polinômios de terceiro grau e a adimensionalização recomendada por Alcântara [25] para representar as curvas de altura manométrica total e rendimento pelas seguintes expressões: N.φ2 .ω 2 Q a H + bH 3 + H= g φ .ω 2 3 Q Q + d ; + cH H φ3 .ω φ3 .ω em que: N = número de rotores da bomba considerada; (5) REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 aH , bH , cH , dH = coeficientes de ajuste da curva caracterı́stica da bomba. ηb = aη 2 3 Q Q Q + bη 3 + dη ; (6) + cη φ .ω φ3 .ω φ3 .ω em que: ηb = rendimento hidráulico da bomba (0 ≤ ηb ≤ 1); aη , bη , cη , dη = coeficientes de ajuste da equação de rendimento da bomba. 23 f = frequência de alimentação do motor (Hz); p = número de pólos do motor. O comportamento da curva “conjugado versus rotação” de um motor elétrico assı́ncrono, que possui sua alimentação a partir de um inversor de frequência, apresenta algumas diferenças em relação ao comportamento de um motor com alimentação direta da rede. Nas diferentes frequências fornecidas pelo inversor, a diferença, em “rpm”, entre a rotação com torque nominal e a rotação com torque nulo (rotação sı́ncrona) é sempre igual. A Figura 7 ilustra este princı́pio. Segundo Carvalho [26], a potência requerida no eixo de acionamento de uma bomba é calculada com base na seguinte fórmula P = Q.H.γ ; ηb (7) em que: P = potência no eixo da bomba (W); γ = peso especı́fico da água (N.m3 ). O torque, ou conjugado, requerido no eixo de acionamento da bomba é calculado com base na potência e na velocidade angular do eixo [27] P ; (8) ω em que τ = torque ou conjugado requerido no eixo de acionamento da bomba (N.m). τ= A relação entre a velocidade de rotação do eixo de um motor e a sua velocidade angular é dada por [27] n . 2π; ω= 60 em que n = velocidade de rotação do motor (rpm). (9) Quando os valores nominais de frequência e tensão da rede elétrica de alimentação de um motor assı́ncrono são atendidos, a linearização da curva conjugado versus rotação do motor, permite estimar com precisão o conjugado em função do valor da velocidade de rotação do motor [28] e [29]. Esta linearização pode ser representada pela seguinte fórmula τ= τn (ns − n) ; ns − nn (10) em que: τ = conjugado no eixo do motor operando com rotação n (N.m); τn = conjugado nominal do motor (N.m); ns = velocidade sı́ncrona de rotação do motor (rpm); nn = velocidade nominal de rotação do motor (rpm). Conforme Carvalho & Oliveira [4], a velocidade sı́ncrona de um motor elétrico é dada por ns = em que: 120.f ; p (11) Figura 7: Curvas conjugado versus rotação de um motor elétrico assı́ncrono controlado por um inversor de frequência [30]. Em decorrência da diferença constante entre a rotação sı́ncrona e a rotação sob torque nominal, que ocorre nos motores assı́ncronos controlados por inversores de frequência, podese estabelecer, para as diferentes frequências de alimentação, a seguinte relação entre torque nominal e torque de trabalho τn τ = ; (ns )f n − (nn )f n (ns )f − (n)f (12) em que: τn = torque, ou conjugado nominal do motor (N.m); (ns )f n = rotação sı́ncrona com a frequência nominal de alimentação (rpm); (nn )f n = rotação nominal com a frequência nominal de alimentação (rpm); (ns )f = rotação sı́ncrona com a frequência f de alimentação (rpm); (n)f = rotação sob o conjugado τ com a frequência f de alimentação (rpm). B. Procedimento para o Cálculo da Frequência Na Tabela I são apresentados os valores das constantes aH , bH , cH e dH da Equação 5, que foram ajustados em função dos 4 pares de valores de altura manométrica total versus vazão, lidos na curva caracterı́stica da bomba. Quando os valores ajustados de aH , bH , cH e dH , representados na Tabela I, são associados às demais caracterı́sticas 24 REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 Tabela I: Coeficientes da equação da curva H x Q da bomba Imbil BEK 40. aH 1, 4400x10−1 bH −1, 4844 cH 9, 9155x101 dH −1, 0303x105 P = descritivas da bomba (N = 3 e φ = 0, 145 m) e à vazão de projeto de 21 m3 .h−1 (Q = 5, 833x10−3 m3 .s−1 ), a Equação 5 toma a seguinte forma, que é mais adequada para determinação da altura manométrica da bomba (H em mca) em função dos valores de velocidade angular (ω em rad.s−1 ) do eixo de acionamento da bomba H =9, 262x10−4 .ω 2 − 1, 870x10−2 .ω + 2, 335+ − 4, 642x103 .ω −1 (13) Na Tabela 6 são demonstrados os valores ajustados dos coeficientes aη , bη , cη e dη , da Equação 6, que foram ajustados em função dos 4 pares de valores de rendimento da bomba versus vazão, lidos da curva caracterı́stica da bomba. Tabela II: Coeficientes da equação da curva rendimento x Q da bomba Imbil BEK 40. aη 3, 333x10−2 bη 2, 004x102 cη −1, 653x104 dη −3, 725x10−9 − 6, 050x104 .ω −2 − 2, 610x10−8 .ω −3 (14) A inserção, na Equação 7, do valor da vazão de projeto (Q = 5, 833x10−3 m3 .s−1 ), do peso especı́fico do fluido bombeado (γ = 9777 N.m−3 ) e das equações 13 e 14 resulta na seguinte equação, que permite calcular a potência mecânica requerida no eixo de acionamento da bomba (P em W) em função dos valores de velocidade angular (ω em rad.s−1 ) do eixo de acionamento da bomba P = 5, 810x10−4 .n2 − 1, 091x10−1 .n + 1, 332x102 − 2, 528x106 .n−1 3, 333x10−2 + 3, 661x103 .n−1 − 5, 517x106 .n−2 − 2, 273x10−5 .n−3 (17) e τ = 1, 743x10−2 .n2 − 3, 273.n + 3, 996x103 − 7, 584x107 .n−1 1, 047x10−1 .n + 1, 15x104 − 1, 732x107 .n−1 − 7, 141x10−5 .n−2 (18) Para a determinação teórica das frequências de alimentação do conjunto motobomba para cada posição da lateral móvel do pivô, apresentada na Tabela III, sendo a vazão constante (Q0 = 21 m3 .h−1 ), calcula-se o comprimento equivalente da lateral (Leq ). Determina-se a taxa da perda de carga na distância r do ponto do pivô. Determina-se a distância do ponto do pivô até o ponto de menor carga de pressão (rα ). A partir de rα , determina-se a carga de pressão requerida (Hpα ) para cada posição da lateral, assim é possı́vel determinar a altura manométrica no ponto do pivô (H). Tabela III: Frequências calculadas em função da posição da linha lateral do pivô central. Quando os valores ajustados representados na Tabela II de aη , bη , cη e dη , são associados às demais caracterı́sticas descritivas da bomba (φ = 0, 145 m) e à vazão de projeto de 21 m3 .h−1 (Q = 5, 833x10−3 m3 .s−1 ), a Equação 6 toma a seguinte forma, que é mais adequada para determinação do rendimento da bomba (0 <= ηb <= 1) em função dos valores de velocidade angular (ω em rad.s−1 ) do eixo de acionamento da bomba ηb =3, 333x10−2 + 3, 840x102 .ω −1 + Em termos de rotação do eixo de acionamento da bomba (n em rpm), as Equações 15 e 16 passam a ser 5, 298x10−2 .ω 2 − 1, 042.ω + 1, 332x102 − 2, 647x105 .ω −1 3, 333x10−2 + 3, 84x102 .ω −1 . − 6, 050x104 .ω −2 − 2, 610x10−8 .ω −3 (15) Finalmente, o torque, ou conjugado, requerido no eixo de acionamento da bomba (τ em N.m) em função dos valores de velocidade angular (ω em rad.s−1 ) é dado pela seguinte fórmula 5, 298x10−2 .ω 2 − 1, 042.ω + 1, 332x102 − 2, 647x105 .ω −1 τ = 3, 333x10−2 .ω + 3, 840x102 − 6, 050x104 .ω −1 − 2, 610x10−8 .ω −2 (16) α (graus) 0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 H (m) 82,0 83,4 84,4 85,2 84,2 83,3 81,7 79,7 77,2 77,2 77,2 77,2 77,2 77,2 77,2 77,2 77,6 80,2 82,0 n (rpm) 3334 3358 3375 3390 3372 3357 3328 3294 3250 3250 3250 3250 3250 3250 3250 3250 3257 3303 3334 Rend (%) 61,9 61,8 61,7 61,6 61,7 61,8 62,0 62,1 62,4 62,4 62,4 62,4 62,4 62,4 62,4 62,4 62,3 62,1 61,9 P (W) 7219 7356 7454 7540 7438 7348 7186 6994 6747 6747 6747 6747 6747 6747 6747 6747 6787 7041 7219 τ (N.m) 20,6 20,9 21,0 21,2 21,0 20,9 20,6 20,2 19,8 19,8 19,8 19,8 19,8 19,8 19,8 19,8 19,9 20,3 20,6 ns (rpm) 3365 3389 3406 3421 3403 3388 3359 3324 3279 3279 3279 3279 3279 3279 3279 3279 3287 3333 3365 fα (Hz) 56,09 56,49 56,78 57,03 56,73 56,47 55,99 55,42 54,66 54,66 54,66 54,66 54,66 54,66 54,66 54,66 54,79 55,56 56,09 Com os valores admensionalizados de vazão e altura manométrica, determina-se, mediante, a Equação (5), a rotação angular (ω) da bomba para cada posição da lateral. Com a Equação (14), determina-se o rendimento da bomba (ηb ) para cada posição da lateral. Para a determinação da potência no eixo da bomba (P ), utiliza-se a Equação (17) e consequentemente com a Equação (18), determina-se o conjugado no eixo do motor (τ ). A transformação da rotação angular (ω) em rotações por minuto (rpm), é obtida pela Equação (9) e, finalmente, calcula-se a frequência de alimentação do conjunto motobomba mediante a aplicação da Equação (11). V. R ESULTADOS A programação Ladder do CLP foi simples e intuitiva para este tipo de controlador, uma vez que já existem áreas REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 25 de memória destinadas para transferência de dados para os protocolos de rede Modbus-RTU, como mostrado na Figura 8. Figura 9: Gráfico da frequência do inversor de frequência em função da declividade do terreno, ao longo do tempo (três ciclos completos). Figura 8: Trecho do programa LADDER para programação de controle entre CLP e Inversor de Frequência (Modbus-RTU). Os diversos protocolos de comunicação (ZigBee, ModBusR utilizados e seus meios de transmissão RTU e Compobus) não sofreram degradação do sinal ou interferências devido à utilização de cabos comuns, mesmo nos locais de maior interferência eletromagnética (ao lado do inversor de frequência). O controle dos parâmetros do inversor de frequência realizado pelo controlador lógico programável (CLP), mostrou-se eficaz, com a frequência de rotação do conjunto motobomba estável e conforme a necessidade de pressão ao longo da linha lateral em função da declividade do terreno, no qual o pivô central estava instalado, Figura 9 e Figura 10. A frequência mı́nima necessária para manter a pressão da linha lateral do pivô central, para este tipo de topografia do terreno, foi de 54,45 Hz. A frequência máxima utilizada no sistema, CLP e inversor, foi de 57,05 Hz. Ressalta-se que, com estes valores de frequência, não houve problema de variação da vazão (lâmina de água aplicada constante), uma vez que a pressão da linha lateral móvel ficou sempre acima da pressão das válvulas reguladoras (configuradas em 20 mca). Sem o sistema de controle realizado pelo CLP, a frequência era constante e igual a 60 Hz, utilizando a potência máxima Figura 10: Gráfico da frequência do inversor de frequência em função da declividade do terreno (um ciclo completo – 360o ). que poderia ser fornecida pelo conjunto motobomba. O padrão ZigBee, 802.15.4, mediante a utilização dos módulos XBee da Digi, foi eficiente na transmissão dos sinais dos sensores de umidade de solo. A utilização de uma rede de sensores sem fio (RSSF) mostrou-se adequada devido a não haver necessidade de fios ou cabos espalhados na cultura irrigada, o que facilitou a sua manutenção e o seu manejo. VI. C ONCLUS ÕES E T RABALHOS F UTUROS O sistema de controle e os protocolos de redes de comunicação utilizados entre o inversor de frequência e o controlador lógico programável (CLP), bem como entre os sensores de pressão, ao longo da linha lateral e o CLP mostraram-se efetivos e estáveis, para o tipo de aplicação de irrigação por pivô central. 26 REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 Figura 11: Gráfico da Potência consumida (kW) pelo conjunto motobomba em função da frequência do inversor (Hz). Figura 13: Gráfico da Potência consumida (kW) pelo conjunto motobomba em função da frequência do inversor (Hz). rava sob controle do inversor foi pouco superior ao valor determinado sem o controle do inversor (10, 20/13, 23 = 0, 77), indicando que o inversor promoveu uma pequena melhora no rendimento do motor. Além da redução do consumo de energia e de uma pequena melhora no rendimento do motor, foi também observada uma melhora no fator de potência, que passou de 0,84 para 0,88. Como sugestão para trabalhos futuros tem-se a possibilidade de novos estudos com implementação de tecnologias tais como: Lógica Fuzzy e redes neurais. Bem como, o estudo de uma rede sem fio 802.15.4, em substituição às redes ModbusR RTU e Compobus. Figura 12: Vista da lateral móvel do Pivô Central, em funcionamento, Modelo Valley 4071-8000-VSN/2-94. O método de cálculo das frequências para o inversor mostrou-se viável para o correto funcionamento do sistema de irrigação, uma vez que não houve falta de pressão ao longo da linha lateral durante todo o ciclo de 3 giros. Na Figura 13 são apresentados valores de potência ativa medidos ao longo de um giro completo da linha lateral móvel do pivô. Nesta figura são também apresentados valores de potência mecânica no eixo de acionamento do motor. As séries de dados foram tomadas sob duas condições operacionais distintas: (i) com a unidade de bombeamento controlada pelo inversor de frequência (P.Ativa COM e P.Eixo COM) e (ii) com a unidade de bombeamento sem o controle do inversor (P.Ativa SEM e P.Eixo SEM). Os valores médios de potência ativa por giro completo (13,23 kW sem o inversor e 10,75 kW com o inversor) indicam uma redução de consumo de energia da ordem de 19% ((13, 23 − 10, 75)/13, 23) quando o inversor é utilizado. A razão potência no eixo pela potência ativa (8, 53/10, 75 = 0, 79) determinada enquanto a unidade de bombeamento ope- AGRADECIMENTOS Os autores agradecem ao Centro Federal de Educação Tecnológica de Minas Gerais (CEFET/MG), ao Conselho Nacional de Desenvolvimento Cientı́fico e Tecnológico (CNPq), à Universidade Federal de Lavras (UFLA) , à Fundação de Amparo a Pesquisa de Minas Gerais (FAPEMIG), à Universidade Federal de Campina Grande (UFCG) e ao Instituto de Estudos Avançados em Comunicações (Iecom), pelo apoio a realização da pesquisa. R EFER ÊNCIAS [1] E. B. de Azevedo, “Viabilidade do uso do inverso de freqência em sistema de irrigação do tipo pivô central.” Dissertação de Mestrado em Engenharia Agrı́cola. Universidade Federal de Lavras., 2003. [2] S. Campana, D. Oliveira Filho, A. Soares et al., “Adequação de força motriz em sistemas de irrigação por aspersão convencional e pivô central,” in Proceedings of the 3. Encontro de Energia no Meio Rural. SciELO Brasil, 2000. [3] E. B. Azevedo, A. Colombo, A. J. Carvalho, and G. F. Rabelo, “Redução do consumo de energia elétrica com o uso de inversor de frequência em pivô central,” in Congresso de Pós-Graduação da UFLA, UFLA, Ed., Lavras, 11 2002, pp. 104–108. [4] L. Masiero, D. Oliveira Filho, and R. Oliveira, “Utilização de inversores de frequência para racionalização do uso da energia elétrica em sistema de irrigação por pivô central,” Engenharia na Agricultura, pp. 35–45, 1999. REVISTA DE TECNOLOGIA DA INFORMAÇÃO E COMUNICAÇÃO, VOL. 4, NO. 2, OUTUBRO 2014 [5] A. M. Medeiros, L. F. C. Oliveira, J. W. L. Nerys, A. M. Oliveira, and E. G. Marra, “Potencial de ecomnomia de energia elétrica em pivô central, com o uso de inversor de frequência,” in Simpósio Brasileiro de Pesquisa em Cafeicultura. 8, Araguari. Anais... Araguari: Associação dos Cafeicultores de Araguari, 2006, pp. 45–49. [6] C. H. Pair et al., Irrigation. Irrigation Association, 1983. [7] L. Jacinto, “A pecuária do futuro com a ajuda da irrigação,” Irrigação e Tecnologia Moderna, Brası́lia, no. 51, pp. 50–54, 2001. [8] J. Carvalho and L. Oliveira, “Instalações de bombeamento para irrigação: hidráulica e consumo de energia,” Lavras. Editora UFLA, 2008. [9] C. R. Mello, “Avaliação da utilização do inversor de frequência em sistemas de bombeamento para irrigão.” Dissertação de Mestrado em Engenharia Agrı́cola. Universidade Federal de Lavras., 1999. [10] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “A survey on sensor networks,” Communications magazine, IEEE, vol. 40, no. 8, pp. 102–114, 2002. [11] H. Karl and A. Willig, Protocols and architectures for wireless sensor networks. John Wiley & Sons, 2007. [12] Q. Zhang, J. Li, J. Rong, X. Weiheng, and H. Jinping, “Application of WSN in precision forestry,” in 10th International Conference on Electronic Measurement & Instruments (ICEMI), 2011, vol. 4. IEEE, 2011, pp. 320–323. [13] H. Gros-Desormeaux, P. Hunel, N. Vidot, and E. Stattner, “Acoustic counting algorithms for wireless sensor networks,” in Proceedings of the 6th ACM symposium on Performance evaluation of wireless ad hoc, sensor, and ubiquitous networks. ACM, 2009, pp. 79–84. [14] P. Zhang, C. M. Sadler, S. A. Lyon, and M. Martonosi, “Hardware design experiences in zebranet,” in Proceedings of the 2nd international conference on Embedded networked sensor systems. ACM, 2004, pp. 227–238. [15] J. de S Neto, J. Silva, T. Cavalcanti, D. Rodrigues, J. da Rocha Neto, and I. A. Glover, “Propagation measurements and modeling for monitoring and tracking in animal husbandry applications,” in Instrumentation and Measurement Technology Conference (I2MTC), 2010 IEEE. IEEE, 2010, pp. 1181–1185. [16] K. H. Kwong, T. T. Wu, H. G. Goh, K. Sasloglou, B. Stephen, I. Glover, C. Shen, W. Du, C. Michie, and I. Andonovic, “Implementation of herd management systems with wireless sensor networks,” IET wireless sensor systems, vol. 1, no. 2, pp. 55–65, 2011. [17] J. I. Huircán, C. Muñoz, H. Young, L. Von Dossow, J. Bustos, G. Vivallo, and M. Toneatti, “Zigbee-based wireless sensor network localization for cattle monitoring in grazing fields,” Computers and Electronics in Agriculture, vol. 74, no. 2, pp. 258–264, 2010. [18] E. F. Nunes, N. L. Cappelli, and C. K. Umezu, “Avaliação da propagação de sinais de radiofrequência para tecnologia zigbee em granja de frango de corte,” Revista Brasileira de Engenharia Agrıcola e Ambiental, vol. 15, no. 1, pp. 102–107, 2011. [19] W. Chebbi, M. Benjemaa, L. Kamoun, M. Jabloun, and A. Sahli, “Development of a wsn integrated weather station node for an irrigation alert program under tunisian conditions,” in 8th International MultiConference on Systems, Signals and Devices (SSD), 2011. IEEE, 2011, pp. 1–6. [20] P. Wang, Z. Sun, M. C. Vuran, M. A. Al-Rodhaan, A. M. Al-Dhelaan, and I. F. Akyildiz, “On network connectivity of wireless sensor networks for sandstorm monitoring,” Computer Networks, vol. 55, no. 5, pp. 1150– 1157, 2011. [21] F. Pierce and T. Elliott, “Regional and on-farm wireless sensor networks for agricultural systems in eastern washington,” Computers and Electronics in Agriculture, vol. 61, no. 1, pp. 32–43, 2008. [22] H. Bogena, M. Herbst, J. Huisman, U. Rosenbaum, A. Weuthen, and H. Vereecken, “Potential of wireless sensor networks for measuring soil water content variability.” [23] J. Keller and R. D. Bliesner, Trickle irrigation planning factors. Springer, 1990. [24] J. D. Valiantzas and N. Dercas, “Hydraulic analysis of multidiameter center-pivot sprinkler laterals,” Journal of irrigation and drainage engineering, vol. 131, no. 2, pp. 137–146, 2005. [25] W. Alcântara, “Estações de bombeamento,” in Congresso Nacional de Irrigação e Drenagem, 8a., Florianópolis. Anais... Florianópolis: Associação Brasileira de Irrigação e Drenagem, 1988, pp. 107–208. [26] R. Carlson, “The correct method of calculating energy savings to justify adjustable-frequency drives on pumps,” Industry Applications, IEEE Transactions on, vol. 36, no. 6, pp. 1725–1733, 2000. [27] H. D. Young and R. A. Freedman, Fı́sica I, EUA, 2001. [28] M. C. I. Silva, “Cálculo das perdas para diversas condições de carga,” Revista Eletricidade Moderna, vol. 27, no. 306, pp. 74–83, set 1999. 27 [29] WEG, “Guia de aplicação de inversores frequência,” Jaraguá do Sul, 2011. [30] ——, “Motores de indução alimentados por inversores de frequência PWM,” Guia Técnico. Jaraguá do Sul, 2009.
Baixar