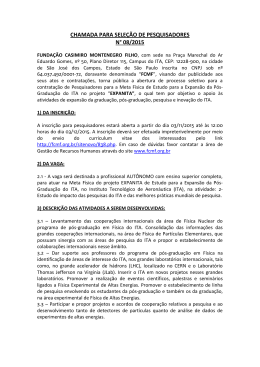
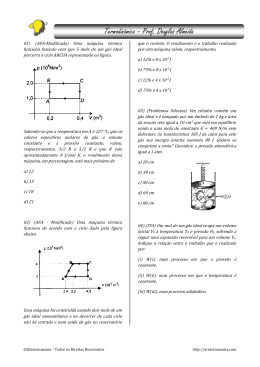
Anais do XVI Encontro de Iniciação Científica e Pós-Graduação do ITA – XVI ENCITA / 2010 Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, 20 de outubro de 2010 Desenvolvimento de Servo Digital Para Aeronaves Autônomas Marcus Henrique Victor Júnior Instituto Tecnológico de Aeronáutica Rua H20B, casa, nº 114, Campus do CTA São José dos Campos – São Paulo 12.228-460 Bolsista PIBIC-CNPq [email protected] Osamu Saotome Instituto Tecnológico de Aeronáutica Pça. Mal. Eduardo Gomes, 50 – CTA – ITA - IEEA 12.228-900 São José dos Campos – São Paulo [email protected] Resumo. O progresso da aviação autônoma vem sendo acompanhado e alavancado pelo desenvolvimento dos seus componentes embarcados. São eles os responsáveis pelas particularidades de cada Veículo Aéreo Não Tripulado - VANT, cuja função estende-se desde verificações e colheitas de dados meteorológicos até operações de cunho militar, em que informações de topografia e ocupação humana são decisivas para ataques incisivos aos alvos estudados. É nesse contexto, que surge o plano de explorar os servo-mecanismos - dispositivos responsáveis pelo controle de partes móveis do avião, tais como: ailerons, leme e profundores. A importância dessa área de estudos, reside no fato de que servo-motores atuam intricadamente à atitude da aeronave aos comandos dados. Logo, o domínio desses mecanismos implicará em um controle acuraz do avião. Palavras chave:servo,vant 1. Introdução No contexto de aviação autônoma, servos são atuadores essenciais utilizados no acionamento das superfícies de aeronaves devido a alta capacidade de carga concentrada em pequenas dimensões. Servo mecanismos são aplicados no controle remoto de aeronaves e sistemas de navegação automático, mas o avanço da microeletrônica com o emprego de dispositivos semicondutores de potência, somado a microcontroladores com alto poder de processamento e diferentes interfaces mapeadas permitem, hoje, a montagem de circuitos de controle e acionamento do motor dos servos com maior eficiência, confiabilidade e miniaturização. No artigo MODELING OF ACTUATORS FOR UAV CONTROL SURFACES [2], modelos de servos comerciais foram estimados a partir de banco de testes automatizado. Dando sequência ao trabalho, nossa proposta para circuito de atuação do motor de servos comerciais permitirá estender a precisão no controle de posição e velocidade, bem como a capacidade de comunicação, a partir do uso de interfaces dedicadas, coletando parâmetros de posição, velocidade e consumo. 2. Realizações O modelo escolhido para o trabalho é a terceira versão do OpenServo (V3), que conta com as seguintes propriedades: 1.Controle de velocidade baseado em Back EMF; 2.Sensor de Temperatura; 3.Clock de 20MHz; 4.Interface I2C/TWI de 400kHz. A medição da velocidade baseada no Back EMF resulta na ausência de um sensor no servomecanismo.O princípio está no campo eletromagnético gerado pela rotação do motor, que induz uma tensão proporcional à velocidade no próprio circuito. Essa tensão é medida em intervalos muito pequenos de tempo, nos quais a alimentação do motor é cortada e, segundo a Lei de Faraday, a variação do fluxo do campo magnético gera uma diferença de potencial com sentido contrário ao da variação que a causou. Desse modo, elimina-se um componente e o substitui por um instrumento de medição de maior acurácia, que pode fornecer melhores respostas às atitudes do servo-motor. A Figura 2 exemplifica a diferença de comportamento de dois servo-motores iguais, porém com controles de velocidade diferentes. Anais do XVI Encontro de Iniciação Científica e Pós-Graduação do ITA – XVI ENCITA / 2010 Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, 20 de outubro de 2010 Figura 1: OpenServo. Imagem retirada de [1]. Figura 2: A curva verde mostra um controle baseado em Back EMF. No tempo 100, a velocidade é mudada do valor 0 para 150 e no tempo 300, de 150 para o valor 0. O mesmo acontece no motor da curva azul, contudo as respostas obtidas são visivelmente distintas. O motor representado pela curva verde possui maior adequação e melhor resposta ao comando dado que o outro motor. Imagem retirada de [1]. Anais do XVI Encontro de Iniciação Científica e Pós-Graduação do ITA – XVI ENCITA / 2010 Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, 20 de outubro de 2010 Sobre o I2C/TWI, é um protocolo bidirecional utilizado pelo OpenServo para a comunicação com o controlador. O protocolo foi criado pela Philips, que detem os direitos sobre sua invenção. Por esse motivo, algumas impresas adotaram nomes diferentes para o mesmo protocolo, a fim de usufruir da sua capacidade de comunicação. Coletadas as informações fundamentais para a consolidação do projeto, iniciou-se a fase de escolha dos materiais e o estudo de suas aquisições. Os componentes escolhidos estão disponíveis na página http://www.openservo.com/OpenServoV3 . Na presente data, os materiais não estão disponíveis para a viabilização e continuação do projeto. 3. Conclusões A partir dos estudos realizados, pôde-se vislumbrar a utilização de um servo mecanismo que operasse de maneira mais eficiente e direcionada para fins específicos. Desse modo, com o estudo do openservo, a viabilização desse objetivo tornou-se possível. Ressalva-se que devido a não aquisição dos materiais relacionados à montagem do protótipo, o projeto tomou um rumo essencialmente teórico. Sendo assim, houve apenas o estudo do caso e nenhum tipo de montagem de aparato físico do servomecanismo. 4. Agradecimentos Todo esse trabalho não seria possível, se não houvesse a matéria de MTP-02, iniciada em 2009, no ITA. Foi pelo intermédio do Prof. Dr. Jefferson, que tive contato com o caríssimo Prof. Osamu, o qual acolheu o projeto de Telemetria para a Equipe de Aerodesign, dos alunos do ITA. Sob as orientações do Eng. Fábio Rofino, demos os primeiros passos nesse trabalho pioneiro, cuja repercussão atingiu-me de forma positiva, consolidada pela bolsa de estudos mantida pelo CNPq. A todos esses e muitos outros, meus agradecimentos. Foram e continuam sendo essenciais para minha formação como engenheiro e cidadão. 5. Referências [1] OpenServo. http://www.openservo.org. [2] FRANCO, Glevson Diniz, 2007.
Baixar