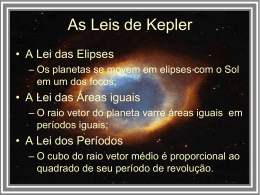
Universidade do Estado de Santa Catarina – UDESC Centro de Ciências Tecnológicas – CCT Departamento de Engenharia Mecânica – DEM Sistemas de Controle (CON) Modelagem de Sistemas de Rotação e Eletromecânicos Aula 03 e 04 2014/2 Prof. Eduardo Henrique Couto Plano de Aula 2 Sistemas mecânicos de rotação Engrenagens ideais Sistemas eletromecânicos Sistemas de nível de líquido Sistemas térmicos Exemplos Sistemas Mecânicos de Rotação 3 Lei fundamental da mecânica de rotação torques = momento de inércia ∙ aceleração angular Sistemas de Rotação Básicos 4 Sistema torque - momento de inércia 𝑑𝝎 𝒕 𝑑2 𝜽 𝒕 𝝉 𝒕 = 𝐽𝜶 𝒕 = 𝐽 =𝐽 𝑑𝑡 𝑑𝑡 2 𝜶(𝒕): vetor aceleração angular resultante em função do tempo 𝝎(𝒕): vetor velocidade angular resultante em função do tempo 𝜽(𝒕): vetor deslocamento angular resultante em função do tempo 𝝉(𝒕): vetor torque resultante em função do tempo 𝐽: momento de inércia total do eixo Sistemas de Rotação Básicos 5 Sistema torque - mola 𝝉 𝒕 = 𝐾𝜽 𝒕 = 𝐾 𝝎 𝒕 𝑑𝑡 = 𝐾 𝜶 𝒕 𝑑𝑡 𝜶(𝒕): vetor aceleração angular resultante em função do tempo 𝝎(𝒕): vetor velocidade angular resultante em função do tempo 𝜽(𝒕): vetor deslocamento angular resultante em função do tempo 𝝉(𝒕): vetor torque resultante em função do tempo 𝐾: constante elástica de torção da mola Sistemas de Rotação Básicos 6 Sistema torque - amortecedor 𝑑𝜽 𝒕 𝝉 𝒕 = 𝐵𝝎 𝒕 = 𝐵 =𝐵 𝑑𝑡 𝜶 𝒕 𝑑𝑡 𝜶(𝒕): vetor aceleração angular resultante em função do tempo 𝝎(𝒕): vetor velocidade angular resultante em função do tempo 𝜽(𝒕): vetor deslocamento angular resultante em função do tempo 𝝉(𝒕): vetor torque resultante em função do tempo 𝐵: constante de atrito viscoso do amortecedor Rotação - Engrenagens Ideais 7 Supostas rígidas Não possuem atrito Não possuem momento de inércia Rotação - Engrenagens Ideais 8 Rotação: Conjugado: Potência: 𝝎𝟏 (𝒕) 𝝎𝟐 (𝒕) = 𝑟2 𝑟1 = 𝑁2 𝑁1 𝝉𝟐 (𝒕) 𝝉𝟏 (𝒕) = 𝑟2 𝑟1 = 𝑁2 𝑁1 𝝉𝟏 (𝒕) 𝝎𝟏 𝒕 = 𝝉𝟐 (𝒕) 𝝎𝟐 𝒕 𝝎(𝒕): vetor velocidade angular em função do tempo 𝒗(𝒕): vetor velocidade no ponto de contato em função do tempo 𝝉(𝒕): vetor torque em função do tempo 𝒇(𝒕): vetor força no ponto de contato em função do tempo 𝑁: número de dentes da engrenagem 𝑟: raio da engrenagem Sistemas Mecânicos de Rotação 9 Exemplo 1 𝐽𝑟𝑒𝑓 = 𝐽𝑐𝑎𝑟𝑔𝑎 𝑁𝑟𝑒𝑓 𝑁𝑐𝑎𝑟𝑔𝑎 2 Na figura, temos a representação de um sistema de rotação dotado de um jogo de engrenagens supostas ideais. Os vetores de movimento e as constantes envolvidas, bem como o torque (conjugado motor) 𝐶𝑚 , que age sobre o primeiro rotor, estão devidamente indicados. Note que o segundo eixo, ao contrário do primeiro que é rígido, apresenta uma constante elástica de torção 𝐾. Desenvolva as equações que modelam esse sistema. Sistemas Eletromecânicos 10 Associação de dispositivos elétricos ou eletromagnéticos com dispositivos mecânicos. Variáveis de entrada e saída: Grandeza Elétrica Grandeza Mecânica Exemplo clássico: alto-falante Sistemas Eletromecânicos 11 Servomotor de corrente contínua controlado pelo circuito de armadura 𝒊𝒂 (𝒕): vetor corrente de armadura 𝒆(𝒕): vetor força eletromotriz 𝝎(𝒕): vetor velocidade angular resultante 𝑪𝒎 (𝒕): vetor conjugado motor (torque) 𝐽: momento de inércia do motor 𝐾𝑚 : constante de ganho do motor 𝐵: constante de atrito viscoso do motor Sistemas Eletromecânicos 12 Equação do circuito de armadura 𝑑𝒊𝒂 (𝒕) 𝒗𝒂 (𝒕) = 𝐿𝑎 + 𝑅𝑎 𝒊𝒂 (𝒕) + 𝒆(𝒕) 𝑑𝑡 Equação da força eletromotriz induzida 𝒆 𝒕 = 𝐾𝑚 𝝎(𝒕) Equação do conjugado eletromagnético 𝑪𝒎 (𝒕) = 𝐾𝑚 𝒊𝒂 (𝒕) Equação do conjugado eletromecânico 𝑑𝝎(𝒕) 𝑪𝒎 (𝒕) = 𝐽 + 𝐵𝝎(𝒕) 𝑑𝑡 Sistemas Eletromecânicos 13 Funcionamento em regime permanente 𝑑𝝎(𝒕) =0 𝑑𝑡 𝑑𝒊𝒂 (𝒕) =0 𝑑𝑡 𝒗𝒂 = 𝑅𝑎 𝒊𝒂 + 𝒆 𝒆 = 𝐾𝑚 𝝎 𝑪𝒎 = 𝐾𝑚 𝒊𝒂 𝑪𝒎 = 𝐵𝝎 Sistemas Eletromecânicos 14 Característica de conjugado em regime permanente 𝐾𝑚 𝑪𝒎 (𝝎) = (𝒗𝒂 − 𝐾𝑚 𝝎) 𝑅𝑎 Sistemas Eletromecânicos 15 Característica de velocidade em regime permanente 𝝎(𝒗𝒂 ) = 𝐾𝑚 2 𝐾𝑚 + 𝐵𝑅𝑎 𝒗𝒂 Sistemas Eletromecânicos 16 Característica de potência em regime permanente 𝐾𝑚 𝒗𝒂 𝐾𝑚 2 𝑃 𝝎 = − 𝝎 𝝎 𝑅𝑎 𝑅𝑎 𝑃𝑟𝑒𝑠𝑡 = 𝐵𝝎2 𝝎𝑚á𝑥 𝒗𝒂 = 𝐾𝑚 𝑃𝑚á𝑥 𝒗𝒂 2 = 4𝑅𝑎 Sistemas Eletromecânicos 17 Exemplo 2 Um servomotor de imã permanente tem resistência de armadura de 𝑅𝑎 = 2,33 Ω, conjugado máximo (para 𝜔 = 0), 𝐶𝑚á𝑥 = 0,25 𝑁𝑚 e tensão nominal de 𝑣𝑎 = 14 𝑉 . Determine para essa tensão: a) a velocidade máxima (𝜔𝑚á𝑥 ); b) a característica de conjugado; c) a potência máxima; d) o ponto de operação (𝜔, 𝑃) para um conjugado de carga constante 𝐶0 = 0,001 𝑁𝑚. Sistemas de Nível de Líquidos 18 Equação de variação de volume vazões = 𝜟volume Elementos Básicos de Nível 19 Resistência (de válvulas) Fluxo Laminar Fluxo Turbulento 𝒉(𝒕) 𝒒 𝒕 ∝ 𝒉 𝒕 → 𝒒 𝒕 = 𝐾𝒉(𝒕) → 𝑅 = 𝒒(𝒕) 𝒒 𝒕 ∝ 𝑑𝒉(𝒕) 𝑅= 𝑑𝒒(𝒕) 2𝒉(𝒕) 𝒉 𝒕 → 𝒒 𝒕 = 𝐾 𝒉 𝒕 → 𝑅(𝑡) = 𝒒(𝒕) 𝒉(𝒕): nível de fluido em função do tempo 𝒒(𝒕): vazão de fluido em função do tempo 𝑅: resistência à passagem de fluido Elementos Básicos de Nível 20 Capacitância (de reservatórios) 𝑑𝒗(𝒕) 𝐶= 𝑑𝒉(𝒕) Reservatórios com seção transversal constante 𝑑𝒗(𝒕) 𝐴𝑑𝒉(𝒕) 𝐶= = =𝐴 𝑑𝒉(𝒕) 𝑑𝒉(𝒕) 𝒗(𝒕): volume de fluido em função do tempo 𝒉(𝒕): nível de fluido em função do tempo 𝐴: área da seção transversal do reservatório 𝐶: capacitância do reservatório Sistemas de Nível de Líquidos 21 Exemplo 1 Considere o sistema de nível composto por dois tanques, como ilustrado. Adotando os referenciais nulos no ponto de equilíbrio da planta, desenvolva as equações que relacionam a vazão de entrada do primeiro tanque 𝑞𝑖𝑛 (𝑡) com o nível ℎ2 (𝑡) do segundo tanque. Sistemas Térmicos 22 Transferência de calor por condução ou convecção fluxo de calor ∝ 𝜟temperatura fluxo de calor = 𝐾𝜟temperatura = 𝑚𝑎𝑠𝑠𝑎 ∙ 𝑐𝑎𝑙𝑜𝑟 𝑒𝑠𝑝𝑒𝑐í𝑓𝑖𝑐𝑜 ∙ taxa variação temperatura [kcal/s] Sistemas Térmicos 23 Transferência de calor por condução ou convecção Coeficiente 𝐾 para condução [kcal/soC] 𝐴 𝐾=𝑘 𝑋 Coeficiente 𝐾 para convecção [kcal/soC] 𝐾 = 𝐻𝐴 𝑘: condutividade térmica [kcal/msoC] 𝐴: área normal ao fluxo de calor [m2] 𝑋: espessura do condutor [m] 𝐻: coeficiente de convecção [kcal/m2soC] Elementos Térmicos Básicos 24 Resistência térmica 𝑑𝜟𝜽(𝒕) 1 𝜟𝜽(𝒕) 𝑅= = = 𝑑𝒒(𝒕) 𝐾 𝒒(𝒕) 𝜟𝜽(𝒕): diferença de temperatura em função do tempo [oC] 𝒒(𝒕): fluxo de calor em função do tempo [kcal/s] 𝐾: coeficiente de condução ou convecção [kcal/soC] 𝑅: resistência térmica [oC/kcal] Elementos Térmicos Básicos 25 Capacitância térmica 𝐶 = 𝑀𝑐 𝑀: massa do meio térmico considerado [kg] 𝑐: calor específico do meio térmico [kcal/kgoC] 𝐶: capacitância térmica [kcal/oC] Sistemas Térmicos 26 Exercício 2 Considere um sistema formado por um termômetro de mercúrio de parede muito fina de vidro. Supondo que ele esteja a uma temperatura constante 𝜃 e seja mergulhado em um banho com temperatura 𝜃𝑏 obtenha o modelo matemático desse sistema. Estabeleça nesse sentido condições iniciais nulas, ou seja, considere a temperatura inicial do termômetro zero (ou de outro modo, considere 𝜃 a variação de temperatura com relação ao equilíbrio).
Baixar