Reconfiguração do robô ATLAS para
Implementação de Unidade Anti-colisão
Bruno Andrade
Prof. Vítor Santos
06-05-2010
Objectivos
-Substituição das placas de controlo antigas por placas redesenhadas já existentes;
-Análise, para eventual refinamento, das estruturas mecânicas em geral;
-Ajuste dos parâmetros de controlo da carta do motor de tracção, de modo a eliminar as
consequências dos picos de corrente que ocorrem nas grandes variações de velocidade;
-Desenvolvimento de uma carta electrónica para um sistema de segurança:
- Programação de um microprocessador para comunicar com um sensor de ultra-sons;
-Desenvolvimento de algoritmos anti-colisão utilizando o hardware desenvolvido.
Robô Atlas
Programa de controlo em bloco único
+
Electrónica fragmentada
=
Dificuldade em adicionar novas funcionalidades
Necessidade de reconfiguração/reabilitação
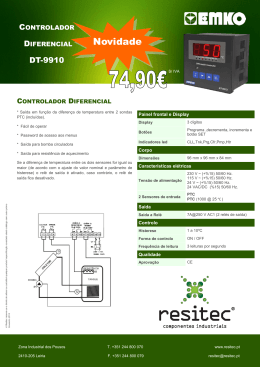
Sensores
Características:
- Detecção de obstáculos de 0 a 254 pulgadas
- Novas medidas a cada 50ms
- A sua calibração é feita no inicio de funcionamento (250ms)
- Preço atractivo
- Compacto
Interfaces:
- PWM
- RS232
- Analógica
LV-MaxSonar-EZ0
Ligação em série:
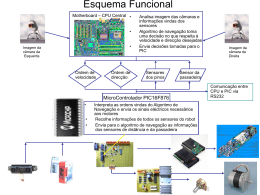
Trabalho desenvolvido
Programação do microcontrolador (18F258)
-Inicio do modo de funcionamento em serie ("kick start“)
-Adquirir e converter a tensão analógica dos sensores
-Enviar os valores das distancias de cada sensor
Clico de Aquisição
Clico de Envio
Quantas leituras faz por segundo?
Quantas vezes envia por segundo?
Protocolo de envio:
Byte de inicio
Byte de informação
1 1 1 1 1 1 1 1
XX XXX XXX
Unidades
Nº sensores
infravermelhos
Bytes com a distância
. . .
Nº sensores
ultra-sons
. . .
. . .
Trabalho desenvolvido
Placa electrónica para ligação e controlo dos sensores ultra-sons
Trabalho desenvolvido
Suportes para fixação dos sensores no robô
Cabos para ligação dos sensores
Trabalho desenvolvido
Novas Placas Electrónicas
Placa Mãe
Placas de expansão:
- Distribuição de tensão
- Ligação dos sensores
- Ligação das luzes
- Relés
- Ultra-sons
- Controlo sensores e das luzes
- Controlo motores e travão
Trabalho futuro
-Análise, para eventual refinamento, das estruturas mecânicas em geral
-Desenvolvimento de um sistema de emergência de baixo nível, para evitar colisões
-Desenvolvimento de um algoritmo de auxilio a navegação
Questões
QUESTÕES
Baixar