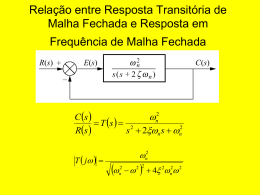
Controle Linear II Resposta no Tempo de Sistemas em Malha Fechada Resposta no Tempo de Sistemas em Malha Fechada Seja o sistema de controle digital em malha fechada apresentado na figura abaixo. Determine a resposta no tempo deste sistema a uma entrada degrau. Resposta no Tempo de Sistemas em Malha Fechada Como visto anteriormente, a função de transferência em malha fechada do sistema é: C ( z) G( z) R( z ) 1 G ( z ) Sendo G(z) determinado por: Resposta no Tempo de Sistemas em Malha Fechada Então, a função de transferência do sistema será: 0,368z 0,264 G( z) z 2 1,368z 0,368 T ( z) 1 G ( z ) 1 0,368z 0,264 z 2 1,368z 0,368 0,368z 0,264 0,368z 0,264 z 2 1,368z 0,368 z 2 1,368z 0,368 T ( z) 2 z 2 z 0,632 z 1,368z 0,368 0,368z 0,264 z 2 1,368z 0,368 z 2 1,368z 0,368 Resposta no Tempo de Sistemas em Malha Fechada Então, a função de transferência do sistema será: 0,368z 0,264 z 2 1,368z 0,368 T ( z) 2 z 1,368z 0,368 z 2 z 0,632 T ( z) 0,368z 0,264 z 2 z 0,632 Sendo a função degrau, na transformada Z, dada abaixo, a saída do sistema será: z R( z ) z 1 C ( z) T ( z) z z 1 Resposta no Tempo de Sistemas em Malha Fechada Saída do sistema: 0,368z 0,264 z 0,368z 2 0,264z C ( z) 2 3 z z 0,632 z 1 ( z 2 z 2 1,632z 0,632) C ( z ) 0,368z 1 z 2 1,4 z 3 1,4 z 4 1,15z 5 0,9 z 6 0,8 z 7 0,87z 8 0,99z 9 1,08z 10 1,08z 11 z 12 0,98z 13 ... O valor final de c(kT), quando k ∞: lim z 1 0,632 ( z 1)C ( z ) 1 0,632 Resposta no Tempo de Sistemas em Malha Fechada Simulação do sistema: Resposta no Tempo de Sistemas em Malha Fechada Simulação do sistema: Mapeamento entre Plano-S e Plano-Z Mapeamento entre Plano-S e Plano-Z Mapeamento entre Plano-S e Plano-Z Mapeamento entre Plano-S e Plano-Z Matematicamente, também podemos relacionar os pólos entre o plano-S e o plano-Z: Seja a função de transferência de segunda ordem no plano-S: Os pólos serão: Esses pólos no plano-S serão equivalentes aos pólos do plano-Z: Mapeamento entre Plano-S e Plano-Z Com a relação dada no slide anterior, e fazendo algumas manipulações matemáticas, obtemos os parâmetros de coeficiente de amortecimento, frequência natural e constante de tempo para o sistema de segunda ordem: Coeficiente de amortecimento: Frequência natural: Constante de tempo: n 1 ln 2 r 2 T 1 n T ln r ln r ln 2 r 2 Equação Característica Equação Característica Considere o sistema de malha fechada apresentado na figura abaixo: A função de transferência do sistema é: T ( z) G( z) 1 GH ( z ) A equação característica (EC) do sistema é: 1 GH ( z) 0 As raízes da EC são os pólos da função de transferência em malha fechada. Exemplo Seja o sistema apresentado abaixo: A função de transferência do sistema será: G( z ) 0,368z 0,264 2 1 G ( z ) z z 0,632 A equação característica do sistema é: 1 G( z ) 0 z 2 z 0,632 ( z 0,5 j 0,618)(z 0,5 j 0,618) 0 Exemplo Os pólos do sistema são complexos e localizados em: z 0,5 j 0,618 0,795 51 0,795 0,89 rad Com esses dados podemos obter o coeficiente de amortaecimento, a frequência natural e a constante de tempo do sistema: Lembrando que z r r T Logo, Exemplo Se compararmos os valores do coeficiente de amortecimento, frequência natural e constante de tempo do sistema, veremos que os valores quando o controle é totalmente analógico difere dos valores quando o controle é digital. Isto se deve ao fato do período de amostragem ser alto. 0,25 n 0,9191 rad / s 4,36s 0,5 n 1 rad / s 2s Exemplo Para que a amostragem não tenha efeito sobre o sistema, o período de amostragem T deve ser muito menor do que a constante de tempo τ do sistema. T 1 ou 1 T ln r A razão τ/T é simplesmente o número de amostras por constante de tempo. Estabilidade de Sistemas Discretos Estabilidade de Sistemas Discretos Nesta seção será estudada a estabilidade de sistemas de controle discretos no tempo. Considere o seguinte sistema: C( z) G( z ) R( z ) 1 GH ( z ) A estabilidade do sistema acima será determinada pela localização dos pólos em malha fechada no plano-Z: P( z) 1 GH ( z) Estabilidade de Sistemas Discretos Assim, tomando a EC do sistema analisamos: P( z) 1 GH ( z) Para o sistema ser estável, os pólos em malha fechada ou as raízes da EC devem estar dentro do círculo unitário no plano-Z. Qualquer pólo em malha fechada que estiver fora do círculo torna o sistema instável. Se um único pólo estiver em z=1 (ou pólos complexos em |z|=1), o sistema se torna criticamente estável. Mais de um pólo em cima do círculo unitário torna o sistema instável. Os zeros em malha fechada não afetam a estabilidade absoluta do sistema e portanto, podem estar localizados em qualquer lugar do Plano-Z. Estabilidade de Sistemas Discretos Exemplo Considere o sistema de controle da figura abaixo. Determine a estabilidade do sistema quando K =1. Solução 1 e Ts 1 G( s) s s( s 1) 1 e Ts 1 0,3679z 0,2642 G( z ) Z s s( s 1) ( z 0,3679)(z 1) Estabilidade de Sistemas Discretos Exemplo Sendo a função de transferência em malha fechada, C ( z) G( z) R( z ) 1 G ( z ) A equação característica é: 1 G( z) 0 1 0,3679z 0,2642 0 ( z 0,3679)(z 1) ( z 0,3679)(z 1) 0,3679z 0,2642 0 ( z 0,3679)(z 1) Estabilidade de Sistemas Discretos Exemplo Equação Característica: ( z 0,3679)(z 1) 0,3679z 0,2642 0 ( z 0,3679)(z 1) ( z 0,3679)(z 1) 0,3679z 0,2642 0 z 2 z 0,6321 0 z1 z2 1 As raízes da EC são: z 0,5 j 0,6181 Como, Logo, o sistema é estável. Estabilidade de Sistemas Discretos – Testes de Estabilidade Três testes de estabilidade podem ser aplicados diretamente a equação característica, P(z) = 0, sem ter que resolver as raízes dessa equação. Esses testes são: Teste de estabilidade Schur-Cohn Teste de estabilidade Jury Transformação bilinear (Critério de Routh-Hurwitz) Estabilidade de Sistemas Discretos – Testes de Estabilidade Os dois primeiros testes revelam a existência de possíveis raízes instáveis ( raízes que se localizam fora do círculo unitário no plano Z); Ambos os testes ( Schur-Cohn e Jury) podem ser aplicados a equações polinomiais com raízes reais ou complexas. Entre os testes, daremos ênfase ao teste de estabilidade de Jury. Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury Um critério de estabilidade para sistemas discretos muito utilizado é o critério de Jury (ou teste de estabilidade de Jury). O teste de Jury é aplicado a partir de uma equação característica P(z). Uma tabela será construída sendo os elementos da tabela dados pelos coeficientes da equação característica P(z). Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury Seja a equação característica de um sistema discreto expressa como: P( z) an z n an1z n1 ... a1z a0 0 A tabela para o teste de Jury é então formada como apresentada ao lado: Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury As linhas “pares” da tabela são os elementos da linha anterior, mas com a ordem invertida. Já os elementos das linhas “ímpares” são formados a partir dos determinantes: Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury As condições necessárias e suficientes para que a EC P(z) não tenha raízes fora do círculo unitário são: (1) P( z ) z 1 0 (2) (1) n P( z ) z 1 0 (3) a0 an b0 bn 1 c0 cn 2 d 0 d n 3 m0 m2 O teste de Jury pode ser aplicado da seguinte maneira: Teste as três primeiras condições (1), (2) e (3). Pare se uma dessas não for satisfeita. Construa a tabela e teste as condições seguintes. Pare se uma das condições não for satisfeita. Para sistemas de ordem n, serão necessárias um total de n+1 restrições. Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury Exemplo 2 Suponha que a eq. característica de um sistema discreto em malha fechada é dada pela expressão: P( z) z 3 1,8z 2 1,05z 0,2 0 Solução A ordem do sistema é 3 (n = 3). Para essa EC temos: P( z ) an z n an 1 z n 1 ... a1 z a0 0 P( z ) a3 z 3 a2 z 2 a1 z1 a0 0 a3 1 a2 1,8 a1 1,05 a0 0,2 Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury Exemplo 2 Primeiramente, iremos analisar as três primeiras condições: (1) P( z ) z 1 0 P(1) (1)3 1,8(1) 2 1,05(1) 0,2 ok P(1) 0,05 0 (2) (1) n P( z ) z 1 0 (1) 3 P(1) [(1) 3 1,8(1) 2 1,05(1) 0,2] (1) 3 P(1) 4,05 0 (3) a0 an a0 a3 0,2 1 ok ok Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury Exemplo 2 Passaremos para a construção da tabela de Jury: Como a ordem do sistema é 3, iremos analisar até a 4a restrição. Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury Exemplo 2 Passaremos para a construção da tabela de Jury: b0 bn1 b0 b2 0,96 0,69 ok Estabilidade de Sistemas Discretos – Teste de Estabilidade de Jury Portanto, como todas as restrições possíveis foram satisfeitas, concluímos que o sistema é estável. P ( z ) z 1 0 ( 1) n P ( z ) z 1 0 a0 a n ok b0 bn 1 Podemos ver essa mesma situação (sistema estável) ao fatorarmos a EC: P( z) ( z 0,5)2 ( z 0,8)
Baixar