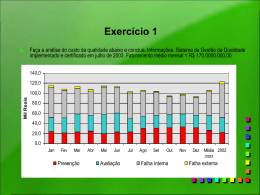
TCC Título: Cálculo de volume efetivo de objetos em movimento usando estereoscopia Aluno: Renato Campelo de Barros Orientador: Wellington Pinheiro dos Santos Sumário Apresentação do trabalho; Introdução sobre estereoscopia; Aspectos conceituais; Apresentação do artefato construído; Metodologia utilizada; Resultados obtidos; Conclusão e trabalhos futuros; Apresentação do trabalho Visão computacional; Estereoscopia; Fotogrametria; “Uso de visão estéreo e fotogrametria para calcular o volume de objetos em movimento numa esteira” Estereoscopia Do grego: Stereos – sólido, relevo + skopein – ver, visão. ◦ Ver em relevo; ◦ Visão sólida. Segundo o dicionário Aurélio: ◦ “estereoscopia é o processo fotográfico que produz efeito tridimensional graças à utilização de dois registros simultâneos, em duas perspectivas diferentes, do mesmo assunto”. Estereoscopia Visualização de um objeto a partir de dois pontos de observação distintos e próximos entre si. Experimento de visão estéreo: Estereoscopia A visão estéreo proporciona sensação tridimensional ao observador; Imagem estereoscópica Ivan Monsão, UNICAMP. Estereoscopia Efeitos passivos: ◦ ◦ ◦ ◦ Perspectiva; Iluminação; Oclusão; Sombras Inerentes ao mundo externo; Estereoscopia Perspectiva Iluminação Oclusão Sombra Estereoscopia Efeitos Ativos ◦ Não está presente diretamente na imagem, sendo interpretado pelo nosso cérebro. Aspectos Conceituais Fotogrametria ◦ Técnica de obtenção de medições de imagens fotográficas; Técnicas de medições de altura ◦ Através da sombra; ◦ Método do deslocamento; ◦ Método da disparidade de paralaxe; Aspectos Conceituais Medição através da sombra Aspectos Conceituais Método do deslocamento Aspectos Conceituais Paralaxe Paralaxe é o deslocamento aparente de um referencial, causado pelo deslocamento do observador ◦ Absoluta; ◦ Relativa; Aspectos Conceituais Método da disparidade de paralaxe Artefato construído Protótipo do sistema de esteira Metodologia Aquisição do par de imagens Metodologia Calibrar equipamento ◦ Encontrar razão pixel/cm; Metodologia Calibrar equipamento ◦ Resolução da imagem; Resolução da imagem precisa ser constante. ◦ Altura da câmera; Altura da câmera influencia na escala pixel/cm. Altura do objeto << Altura da câmera Metodologia Processos Sugestão como trabalho futuro Metodologia Fase 1: Pós-processamento [imA] ◦ Binarização; Eliminar o corpo da esteira; ◦ Abertura; Eliminar ruídos; [imB] ◦ Equalização; Aumentar o contraste; Metodologia Aquisição da imagem Binarização Abertura Equalização AND Metodologia Histograma Metodologia Fase II: Análise e processamento Execução do algoritmo; Entrada: ◦ Par de imagem estéreo Meta: ◦ Encontrar posição de transição de contraste Saída: ◦ Paralaxe relativa em pixels Metodologia Fase II: Análise e processamento Cálculo da Altura Medição da área superior ◦ Execução do algoritmo no sentido vertical e horizontal; ◦ Imagem ortogonal a câmera; Resultados Obtidos Objetos utilizados Caixa-1 Caixa-2 Caixa-3 Caixa-4 Resultados Obtidos Dimensões dos objetos Dimensões dos objetos Nome Caixa-1 Caixa-2 Caixa-3 Caixa-4 Largura(cm) Comprimento(cm) Altura(cm) Volume(cm3) 8,658 8,658 8,000 599,688 5,950 4,190 15,700 391,409 5,098 5,246 3,030 81,035 24,500 16,600 7,000 2846,900 Resultados Obtidos Altura calculada Altura calculada Imagem Paralaxe absoluta caixa1 caixa2 caixa1 caixa1 caixa2 caixa2 caixa3 caixa3 caixa4 Valor Real (cm) 30 30 45 60 45 60 45 60 45 8,0000 15,7000 8,0000 8,0000 15,7000 15,7000 3,0000 3,0000 7,0000 Altura Medida (cm) 6,9153 14,4719 7,2602 7,3127 13,8759 14,1005 2,7779 2,7193 4,8388 Erro Absoluto (cm) 1,0847 1,2281 0,7398 0,6873 1,8241 1,5995 0,2221 0,2807 2,1612 Erro Relativo 13,5593% 7,8222% 9,2478% 8,5916% 11,6188% 10,1878% 7,4026% 9,3567% 30,8738% pixel/cm 320 320 249,00 249,00 249,00 249,00 249,00 249,00 249,00 Altura da Câmera 70,0000 70,0000 90,0000 90,0000 90,0000 90,0000 90,0000 90,0000 90,0000 Resultados Obtidos Valores Encontrados Valores Calculados Nome do Objeto caixa1 caixa2 caixa1 caixa1 caixa2 caixa2 caixa3 caixa3 caixa4 Altura da Câmera 70 70 90 90 90 90 90 90 90 Paralaxe Absoluta Altura Largura Comprimento Volume 30 6,9153 8,8529 8,8529 541,9690 30 14,4719 6,5180 4,6055 434,4320 45 7,2602 8,7102 8,7102 550,8148 60 7,3127 8,7125 8,7125 555,0901 45 13,8759 6,3952 4,5081 400,0447 60 14,1005 6,3818 4,4986 404,8180 45 2,7779 5,3814 5,1474 76,9501 60 2,7193 5,3847 5,1506 75,4185 45 4,8388 1,2598 17,0067 103,6685 Resultados Obtidos Análise do erro Objeto Objeto caixa1 caixa1 caixa2 caixa2 caixa1 caixa1 caixa1 caixa1 caixa2 caixa2 caixa2 caixa2 caixa4 caixa4 Erro ErroRelativo Absoluto Atura dada Câmera Volume Atura CâmeraParalaxe Paralaxe Largura Largura Comprimento ComprimentoAltura Altura Volume 7070 cmcm 3030cm 2,2505% 2,2505% 9,6248% cm 0,1949 0,1949 13,5593% 1,0847 57,7187 7070 cmcm 3030cm 9,5464% 9,9175% 7,8222% 10,9919% cm 0,5680 0,4155 1,2281 43,0231 9090 cmcm 4545cm 0,6032% 0,6032% 8,1497% cm 0,0522 0,0522 9,2478% 0,7398 48,8729 90 cm 60 cm 0,6297% 0,6297% 8,5916% 7,4368% 90 cm 60 cm 0,0545 0,0545 0,6873 44,5976 90 cm 45 cm 7,4826% 7,5919% 11,6188% 2,2064% 90 cm 45 cm 0,4452 0,3181 1,8241 8,6359 90 cm 60 cm 7,2571% 7,3662% 10,1878% 3,4259% 90 cm 60 cm 0,4318 0,3086 1,5995 13,4091 90 cm 45 cm 94,8581% 2,4500% 30,8738% 96,3585% 90 cm 45 cm 23,2402 0,4067 2,1612 2743,2315 Conclusão e trabalhos futuros É possível utilizar a técnica proposta no contexto industrial; Resultados considerados aceitáveis para objetos com textura uniforme; Dificuldades na precisão do protótipo artesanal; Conclusão e trabalhos futuros Sugestão para trabalhos futuros: ◦ Criação de algoritmo de threshold automático; ◦ Ajuste automático da escala pixel/cm;
Baixar