DAS-6651:
Otimização e Suas Subáreas
DAS-6651 - MSPO
Eduardo Camponogara
1
0. Agenda
2
Conceitos
Programação Linear
Programação Linear Inteira
Programação Quadrática
Mínimos Quadrados Não-Linear
Equações Não-Lineares
Otimização Não-Linear Irrestrita
Otimização Não-Linear com Limites Sup/Inf
Otimização Não-Linear Restrita
Programação Semi-Definida
1. Conceitos
Otimização:
–
3
Área da matemática aplicada que se preocupa em
calcular e computar valores ótimos para variáveis
de decisão que induzam o desempenho ótimo, ao
mesmo tempo que satisfazem restrições, de um
modelo matemático.
1. Elementos de um Problema de
Otimização
Variáveis de Decisão:
–
–
4
parâmetros cujos valores definem uma solução para o
problema.
Em um sistema de produção, esses parâmetros podem definir
as quantidades produzidas e os recursos utilizados.
1. Elementos de um Problema de
Otimização
Variáveis de Decisão:
–
–
Função Objetivo:
–
–
5
parâmetros cujos valores definem uma solução para o
problema.
Em um sistema de produção, esses parâmetros podem definir
as quantidades produzidas e os recursos utilizados.
uma função das variáveis de decisão a ser minimizada ou
maximizada.
No sistema de manufatura, podemos estar interessados em
minimizar custos.
1. Elementos de um Problema de
Otimização
Variáveis de Decisão:
–
Função Objetivo:
–
uma função das variáveis de decisão a ser minimizada ou
maximizada. No sistema de manufatura, podemos estar
interessados em minimizar custos.
Restrições:
–
6
parâmetros cujos valores definem uma solução para o
problema. Em um sistema de produção, esses parâmetros
podem definir as quantidades produzidas e os recursos
utilizados.
conjunto de funções que definem o espaço factível de
soluções. No sistema de manufatura, as restrições
estabelecem os limites nos recursos utilizados.
1. Elementos de um Problema de
Otimização
Minimize f(x)
Sujeito a:
g(x) 0
h(x) = 0
x Rn
Onde f: Rn R,
g: Rn Rp
h: Rn Rq
7
1. Duas Exceções
Problemas sem objetivos
–
O usuário deseja apenas encontrar um conjunto de
decisões que sejam viáveis.
Encontre x Rn, tal que:
g(x) 0
h(x) = 0
8
1. Duas Exceções
Problemas com múltiplos objetivos
–
–
9
Em problemas reais, não é incomum procurar otimizar mais do
que um objetivo. No problema de manufatura, o usuário pode
estar interessado em maximizar lucro, maximizar qualidade e
minimizar tempo de produção.
Usualmente, estes problemas são reduzidos a problemas
envolvendo apenas um objetivo (combinando -se múltiplos
objetivos em apenas um ou, alternativamente, escolhendo-se
um objetivo e introduzindo restrições).
Exemplo:
Minimize f1(x)
Maximize f2(x)
2. Programação Linear
Problema:
–
–
Dados:
–
–
–
–
–
10
Um atleta deseja definir uma dieta, ou seja, tipos e quantidades de
alimentos que atendam as suas necessidades mínimas.
Os alimentos devem ser escolhidos de forma a minimizar o preço
total
N alimentos, tais como arroz, feijão, alface, etc.
M tipos de substâncias alimentares, como proteínas, lipídios, etc.
cn o preço unitário do alimento n
amn a quantidade de substância m em cada unidade de alimento n
bm a quantidade mínima de substância m a ser ingerida pelo atleta
2. Programação Linear
11
Exercício: modele o problema em
programação matemática.
2. Programação Linear
Variáveis:
xn quantidade de alimento n a ser comprada e ingerida, n=1,…,N
Restrições:
a11x1 + a12x2 + … + a1NxN b1
a21x1 + a22x2 + … + a2NxN b2
…
aM1x1 + aM2x2 + … + aMNxN bM
x1, x2, …, xN 0
12
2. Programação Linear
Função objetivo:
f = c1x1 + c2x2 + … + cNxN
Formulação compacta:
PL: Minimize cTx
Sujeito a:
Ax b
x0
x RN
13
3. Programação Linear Inteira
Em algumas aplicações, as variáveis de decisão são
inteiras. (Número de pessoas contratadas, número de
peças produzidas, etc.)
O mundo da programação linear inteira engloba os
seguintes problemas
Minimize cTx
Sujeito à:
Ax b
Cx = d
x0
x Zn
14
3. Programação Linear Inteira
Dados do Problema
–
–
–
–
–
–
15
Há um número m de possíveis locais para instalação de
depósitos.
Há um número n de clientes.
A demanda de aço do cliente i é di e esta deve ser suprida por
precisamente um depósito.
A capacidade de um possível depósito no local j é de uj.
O custo de transporte do depósito j para o cliente i é e cij.
O custo de instalação do depósito j é de fj.
3. Programação Linear Inteira
Tarefa
–
16
Formule o problema de definir quais depósitos devem ser
instalados de maneira a suprir a demanda e, ao mesmo
tempo, minimizar o custo total de instalação e transporte.
3. Programação Linear Inteira
Variáveis
xij = 1 se o cliente i é
atendido pelo depósito j
xij = 0 caso contrário
Formulação
n
m
m
Minimize S S cijxij + S fjyj
i=1 j =1
j =1
Sujeito a:
n
yj = 1 se o depósito j é
instalado
yj = 0 caso contrário
S dixij ujyj
i=1
m
S xij = 1
j=1
xij {0, 1} " i, j
yj {0, 1} " j
17
para j =1, ..., m
para i =1, ..., n
4. Programação Quadrática
Representação
Minimize xTQx + cTx
Sujeito a:
Ax b
Cx = d
onde Q é uma matriz simétrica.
Aplicações
–
18
Várias aplicações em identificação de parâmetros para
modelos de processos, modelos estruturais e sistemas de
controle, e em algoritmos como SQP.
4. Programação Quadrática
19
A dificuldade de se resolver tais problemas
depende da natureza da matriz Q.
Quais características de Q tornam o problema
difícil?
4. Programação Quadrática
20
A dificuldade de se resolver tais problemas
depende da natureza da matriz Q.
–
Se Q 0 (positiva semi-definida) ou Q > 0 (positiva
definida) o problema é relativamente fácil de se
resolver (ou seja, encontrar a solução ótima global).
–
Se Q é indefinida (ou negativa semi-definida,
definida) então o problema é muito difícil.
5. Mínimos Quadrados Não-Linear
O problema dos mínimos quadrados não-linear
consiste de um problema da seguinte forma:
P: Minimize 1/2||f(x)||2
x Rn
Onde a) |||| corresponde à norma Euclidiana e
b) f(x) : Rn Rm é uma função qualquer, contínua e diferenciável.
21
Tais problemas têm aplicações no casamento de
modelos com dados experimentais, tipicamente
encontrados em estudos econômicos, aprendizagem
automática e engenharia.
5. Mínimos Quadrados (Linear)
22
Seja w(h) um modelo que descreve a relação entre a
altura e o peso médio das pessoas do sexo feminino.
Suponha que o modelo escolhido é da forma
w(h) = x3h3 + x2h2 + x1h + x0,
um polinômio de ordem 3 representando o peso como
uma função da altura.
5. Mínimos Quadrados (Linear)
23
Os seguintes dados amostrais são fornecidos.
Exemplo (i)
Altura (hi) Peso (wi)
------------------------------------------------------------1
1.5
55
2
1.54
53
3
1.58
56
4
1.60
52
5
1.65
58
6
1.67
54
7
1.70
64
8
1.72
70
9
1.72
71
10
1.75
75
11
1.80
82
12 (n)
1.81
81
---------------------------------------------------------------
5. Mínimos Quadrados (Linear)
Problema
–
Encontre os parâmetros x3, x2, x1 e x0 que
minimizam a função, consistindo da soma dos
quadrados dos erros de predição.
n
Minimize
x1,x2,x3,x4
24
1/2 S || w(hi) - wi ||2
i=1
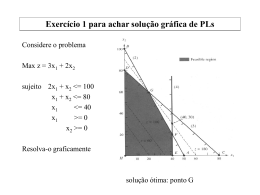
5. Mínimos Quadrados (Linear)
Solução Ótima
x1 = 100.0000
x2 = -33.1098
x3 = -62.9920
x4 = 41.7403
w (peso, kg)
predição
25
h (altura, m)
6. Equações Não-Lineares
26
Aplicações: sistemas de equações não-lineares aparecem em
problemas de otimização, mas também em equações diferenciais
e suas formas discretizadas, jogos dinâmicos e processos
iterativos.
Equações Não-Lineares
– Seja f(x) : Rn Rm uma função contínua e diferenciável
– Problema: encontre x* tal que f(x*) = 0
Observação: alguns algoritmos, transformam este problema em
um problema de otimização irrestrita:
Minimize ||f(x)||
x Rn
para alguma norma ||||.
6. Equações Não-Lineares
Aplicação em sistemas de controle: dado um sistema de
equações diferenciais, encontre um ponto de equilíbrio.
Exemplo
dx1/dt = - x1 - 1
dx2/dt = 2x1x2 - 2sqrt(2)x1 + 2x2 - 2sqrt(2) + sin(x2 - sqrt(2))
dx3/dt = 2x2 - 2sqrt(2)
x = [x1, x2, x3]
dx/dt = f(x) = 0
x* = [-1, sqrt(2), x3]
27
7. Otimização Não-Linear Irrestrita
28
Otimização irrestrita constitui um bloco fundamental no
desenvolvimento de software. Algoritmos para solução de
problemas de otimização restrita fazem uso de otimização
irrestrita.
Problema de Otimização Irrestrita
Minimize f(x)
x Rn
Tipicamente procura-se um ótimo local x*, ou seja, x* tal que
f(x*) f(x) para todo x B(x*, d) = {x : ||x - x*|| d} e d > 0.
Otimização global se preocupa em encontrar um vetor x*
cujo valor f(x*) f(x) para todo x.
7. Otimização Não-Linear Irrestrita
Problema Exemplo:
–
–
–
29
Seja z = (x, y) a coordenada onde será instalada
uma central telefônica.
Suponha que as chamadas são recebidas de um
conjunto S = {z1=(x1,y1), ..., zm= (xm,ym)} de
localidades com probabilidade uniforme.
Seja Z a variável randômica associada com o local
das chamadas.
7. Otimização Não-Linear Irrestrita
Tarefa
–
30
Qual deve ser a localização z da central telefônica para que
E[(Z - z)2] seja minimizado? (E[f(Z)] é o valor esperado da
função f(Z) da variável randômica Z.)
7. Otimização Não-Linear Irrestrita
Solução
m
E[(Z - z)2] = S (zk - z)2.Probabilidade{Z = zk}
k=1
m
= S [(xk,yk) - (x,y)]2 / m
k=1
31
8. Otimização Não-Linear com
Limites Sup/Inf
Formulação: problemas da seguinte classe:
Minimize f(x)
lxu
x Rn
f é uma função contínua, diferenciável
32
Aplicações: estes modelos têm aplicações em engenharia e na
identificação de modelos físicos, onde as grandezas (parâmetros)
são sujeitos a limites.
Algoritmos: alguns algoritmos de otimização restrita resolvem
sequências de problemas com limites superiores e inferiores.
9. Otimização Não-Linear Restrita
Modelo: os problemas de otimização não-linear restrita consistem
em minimizar uma função não-linear (contínua e diferenciável)
sujeita a restrições não-lineares (contínuas e diferenciáveis).
Minimize f(x)
Sujeito à:
g(x) 0
h(x) = 0
Onde f(x) : Rn Rm, g(x) : Rn Rp e h(x) : Rn Rq são
funções contínuas e diferenciáveis
33
Observação: modelos de otimização não-linear restritos são os
mais gerais no domínio da otimização contínua.
9. Otimização Não-Linear Restrita
Problema Exemplo
–
–
Desejamos instalar uma estação de bombeiros de forma que a
mesma esteja dentro de um raio r (km) de um conjunto S =
{(x1,y1), ..., (xp,yp)} de prédios nas proximidades.
Além disso, desejamos localizá-la o mais afastado possível de
outras estações de bombeiros T = {(x1,y1), ..., (xq,yq)}.
Tarefa
Formule este problema em linguagem de otimização.
34
9. Otimização Não-Linear Restrita
Tarefa
Formule este problema em linguagem de otimização.
35
9. Otimização Não-Linear Restrita
Formulação
Maximize d
Sujeito a:
||(x,y) - (xj,yj)|| r
para j = 1, ..., p
||(x,y) - (xj,yj)|| d
para j = 1, ..., q
Observações
d Min{ ||(x,y) - (xj,yj)|| : j = 1, ..., q }
r Max{ ||(x,y) - (xj,yj)|| : j = 1, ..., p }
36
10. Programação Semi-Definida
Caracterização
Problemas com função objetivo linear.
Restrições envolvendo matrizes e suas propriedades
(tais como, positiva definida e semi-definida).
Definições
Fi(x) = Fi,0 + Fi,1x1 + ... + Fi,nxn
onde Fi,j = Fi,jT é uma matriz simétrica
37
10. Programação Semi-Definida
Classe de Problemas
Minimize cTx
Sujeito a: Fi(x) 0
para i = 1, ..., m
(a matriz Fi(x) deve ser positiva semi-definida,
linear matrix inequality).
38
10. Programação Semi-Definida
Exemplo:
–
Considere o seguinte sistema dinâmico
dx/dt = Ax
–
Uma condição suficiente para que o sistema convirja para x* = 0,
para qualquer estado inicial x(0), quanto t é a existência de um
função V(x) com as seguintes propriedades:
–
–
39
V(x) é positiva definida, ou seja, para todo x 0 tem-se V(x) > 0 e
V(0) = 0
dV(x)/dt < 0 para x 0.
Problema: como encontrar tal função?
10. Programação Semi-Definida
Seja V(x) = xTPx para P > 0. Neste caso V(x) satisfaz a condição
de ser positiva definida.
Como fazer para satisfazer a segunda condição?
dV/dt = d(xTPx)/dt =
= (dx/dt)TPx + xTP(dx/dt) =
= (xTAT)Px + xTP(Ax) =
= xT( ATP + PA)x
Então a condição dV/dt < 0 é equivalente a ATP + PA < 0.
40
10. Programação Semi-Definida
Formulação do problema
Minimize cTx
Sujeito a:
P(x) > 0
ATP(x) + P(x)A < 0,
onde P(x) gera o espaço de matrizes simétricas
41
11. Referências
Optimization Tree
–
OR Notes
–
42
http://www-fp.mcs.anl.gov/otc/Guide/OptWeb/
http://www.ms.ic.ac.uk/jeb/or/contents.html
12. FIM
43
Obrigado!!!
Baixar