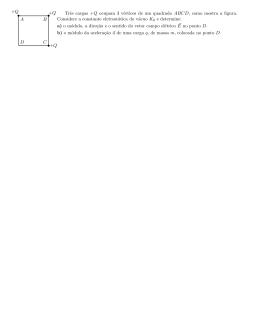
Universidade Salvador Departamento de Engenharia e Arquitetura Curso de Engenharia Elétrica Geometria Analı́tica e Álgebra Linear: Princı́pios e Aplicações na Engenharia Franklin Lima Danilo Barreto Igor Moreira Lucas Miranda Thiago Sousa Salvador 2010 Sumário 1 Introdução 3 2 Vetores 4 2.1 2.2 2.3 Soma de vetores e multiplicação por escalar . . . . . . . . . . . . . . . . . 5 2.1.1 Método geométrico . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2.1.2 Método analı́tico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Produto entre vetores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 2.2.1 Produto Escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 2.2.2 Produto Vetorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 3 Autovalores e Autovetores 11 3.1 Definição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 3.2 Exercı́cios Resolvidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 3.2.1 3.3 Autovalores e Autovetores . . . . . . . . . . . . . . . . . . . . . . . 12 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 3.3.1 Genética . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4 Sistemas de Equações Lineares 17 4.1 Eliminação Gaussiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 4.2 Solução por Matriz Inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 4.3 Exercı́cios Resolvidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 4.4 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 4.4.1 Redes Elétricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 4.4.2 Balanceamento de Equações Quı́micas . . . . . . . . . . . . . . . . 22 4.4.3 Matemática aplicada . . . . . . . . . . . . . . . . . . . . . . . . . . 22 5 Conclusão 24 Referências Bibliográficas 25 3 1 Introdução Uma das maiores dificuldades que os alunos de engenharia e áreas correlatas enfrentam é a ampla quantidade de assuntos apresentados e que, na maioria das vezes, necessitam de um alto nı́vel de abstração para o seu entendimento, uma vez que a sua comprovação prática se torna limitada por diversos motivos. Este trabalho propõe uma breve revisão de conceitos básicos relacionados com a Geometria Analı́tica e a Álgebra Linear com foco em suas aplicações, objetivando minimizar os problemas enfretados pelos alunos destes cursos de modo a mostrar-lhes as aplicações práticas dos estudos de determinados assuntos. O estudo se inicia através da noção de vetor, apresentando subsequentemente algumas propriedades e operações básicas com estes entes matemáticos muito usados na fı́sica. O capı́tulo 3 trata dos autovalores e autovetores, conceitos também matemáticos, mas com uma infinidade de aplicações, como na mecânica quântica, processamento de imagens, análise de vibrações, mecânica dos sólidos, estatı́stica, dentre outros. Por fim, mas não menos importantes, apresentaremos, no capı́tulo 4 os Sistemas de Equações Lineares, focando no métodos de eliminação Gaussiana e Matriz Inversa para a sua resolução. Os autores 4 2 Vetores Grandezas como temperatura, pressão, massa, potência e outras podem ser completamente definidas por um único valor numérico e sua unidade de medida, como por exemplo: 25 o C, 1 KPa, 2.800 kg. Elas são denominadas grandezas escalares porque, na forma gráfica, podem ser visualizadas como um ponto numa escala. Outras grandezas como velocidade, força, etc. precisam, no entanto, além do valor escalar, de uma direção e graficamente são representadas por um segmento de reta com seta. Estas grandezas são denominadas grandezas vetoriais. Um vetor é, portanto, um ente matemático, que para sua completa descrição deve ser conhecida a sua intensidade, ou módulo, ou ainda norma, direção e sentido. Notação Um vetor pode ser denotado por uma letra com uma seta em cima, ou ainda um acento → ~ ou por seu segmento de reta orientado, como em − circunflexo, por exemplo dˆ ou d, AB. Por ser um segmento de reta orientado, o vetor precisa de, no mı́nimo, dois pontos para a sua definição. Vejamos o exemplo abaixo. −→ Exemplo. Dados os pontos A = (0, 0, 0) e B = (2, 3, 1), o vetor AB, será −→ AB = B − A ⇒ (2, 3, 1) − (0, 0, 0) = (2, 3, 1), que pode ser chamado genericamente como ~u = (2, 3, 1), isto por que uma de suas coordenadas é a origem. −→ Importante! Note que existe também o vetor BA, que será −→ BA = A − B ⇒ (0, 0, 0) − (2, 3, 1) = (−2, −3, −1), ou pode ser chamado genericamente como ~v = (−2, −3, −1). Ressaltando-se que ~u 6= ~v , embora |~u| = |~v |. 2.1 Soma de vetores e multiplicação por escalar Sejam ~v1 e ~v2 dois vetores. A soma desses vetores é um terceiro vetor, o vetor resultante: ~v = ~v1 + ~v2 2.1.1 Método geométrico Adição de vetores Para determinarmos o módulo, a direção e o sentido desse vetor resultante, utilizamos a regra do paralelogramo. Primeiramente, desenhamos o paralelogramo definido a partir dos vetores ~v1 e ~v2 . a) Módulo do vetor resultante: É dado pelo comprimento da diagonal indicada na figura. Portanto, v2 = v12 + v22 + 2v1 v2 cosα, onde α é o ângulo entre os dois vetores. b) Direção: Aquela da reta que contém a diagonal. c) Sentido: A partir do vértice formado pelos dois vetores. Portanto o vetor resultante é obtido desenhando-se uma das figuras abaixo: 5 Subtração de vetores Consideremos os vetores ~v1 e ~v2 . A subtração de vetores ~v1 e ~v2 , resulta em um terceiro vetor (chamado resultante), cujas propriedades são inferidas a partir da soma dos vetores ~ 2 ). O vetor tem módulo e direção iguais ao do vetor mas tem o sentido oposto. ~v1 e (−v ~ 2. Reduzimos o problema da subtração de dois vetores ao problema da soma de ~v1 e −v 2.1.2 Método analı́tico Além da representação geométrica (ou gráfica) utilizada anteriormente, podemos fazer uso de uma outra representação, conhecida como representação analı́tica do vetor. Na representação analı́tica também utilizamos um conjunto de três atributos de um vetor (esses atributos são conhecidos como componentes do vetor). Para a definição de componentes, a melhor alternativa - e a mais fácil - é usar um sistema de eixos cartesianos. Componentes de um vetor Dado um sistema de eixos cartesianos (composto de um conjunto de três eixos ortogonais), podemos definir as componentes de um vetor nesse sistema de eixos tomando-se as projeções do vetor nesses eixos. Vamos tomar, por uma questão de simplicidade, um sistema com dois eixos ortogonais (x e y). Esses dois eixos estão contidos num plano. Consideremos um vetor nesse plano. A componente x do vetor ~v (designada por ~vx ) é dada pela projeção do vetor no eixo x. Para determinarmos a projeção do vetor ao longo de qualquer eixo, consideramos as extremidades do vetor e por elas traçamos linhas perpendiculares ao eixo até encontrá-lo. Tomamos então a distância entre as interseções como a projeção se a flecha estiver na mesma direção do eixo (isto é, se o ângulo entre o vetor e o sentido 6 positivo do eixo for um ângulo agudo). Caso contrário, a projeção será essa distância, mas com sinal negativo. A projeção, portanto, tem que levar em conta a orientação do vetor em relação ao eixo. A projeção fica melhor definida, matematicamente, em termos do ângulo θ (entre o vetor e o eixo x). Podemos escrever: ~vx = |v|cosθ, onde v é o módulo do vetor. Analogamente, a componente y é a projeção do vetor ~v ao longo do eixo y. A expressão para ~vy é, em termos de θ: ~vy = |v|senθ Multiplicação por um escalar Podemos multiplicar um vetor ~v por um número α. Dessa operação resulta um novo vetor: ~ = α~v , R com as seguintes caracterı́sticas: a) O módulo do novo vetor é o que resulta da multiplicação do valor absoluto de pelo módulo de ~v . b) A direção do novo vetor é a mesma de ~v . c) O sentido de R é o mesmo de ~v se α for positivo e oposto ao de ~v se α < 0. 7 2.2 Produto entre vetores Na seção anterior vimos o produto entre um vetor e um escalar, operação que resulta noutro vetor com mesma direção e sentido diferente caso o escalar seja negativo, ou mesmo sentido caso o escalar seja positivo. Veremos nesta seção dois outros tipos de produtos, agora entre vetores. São os produtos escalar e vetorial. 2.2.1 Produto Escalar Chama-se produto escalar (ou produto interno usual) de dois vetores ~u = x1~i+y1~j +z1~k e ~v = x2~i + y2~j + z2~k, e se representa por ~u · ~v , ao número real ~u · ~v = x1 x2 + y1 y2 + z1 z2 O produto escalar de ~u por ~v também é indicado por < ~u, ~v > e se lê u escalar v. Exemplo 1. Se ~u = 3~i − 5~j + 8~k e ~v = 4~i − 2~j − ~k, tem-se ~u · ~v = 3 × 4 + (−5) × (−2) + 8 × (−1) = 12 + 10 − 8 = 14 Propriedades do Produto Escalar I. ~v · w ~ =w ~ · ~v II. ~v · ~v = |~v | · |~v | = |v|2 III. ~u · (~v + w) ~ = ~u · ~v + ~u · w ~ IV. (k~v ) · w ~ = ~v · (k w) ~ = k(~v · w) ~ V. |k~v | = |k||~v | VI. |~u · ~v | < |~u| · |~v | (desigualdade de Schwarz) VII. |~u + ~v | < |~u| + |~v | (desigualdade triangular) 2.2.2 Produto Vetorial Dados os vetores ~u = x1~i + y1~j + z1~k e ~v = x2~i + y2~j + z2~k, tomados nesta ordem, chama-se produto vetorial dos vetores ~u e ~v , e se representa por ~u × ~v , ao vetor: ~u × ~v = (y1 z2 − z1 y2 )~i − (x1 z2 − z1 x2 )~j + (x1 y2 − y1 x2 )~k 8 Cada componente deste vetor pode ainda ser expresso na forma de um determinante de 2a ordem: y1 z1 x1 z1 x1 y 1 ~i − ~j + ~k ~u × ~v = y2 z2 x2 z2 x2 y 2 Exemplo 1. Cálculo do produto vetorial dos vetores ~u = 5~i + 4~j + 3~k e ~v = ~i + ~k, tem-se ~ ~ ~ i j k ~u × ~v = 5 4 3 1 0 1 Resolvendo o determinante, temos 4 3 ~u × ~v = 0 1 5 3 ~i − 1 1 5 4 ~j + 1 0 ~k ~u × ~v = (4 − 0)~i − (5 − 3)~j + (0 − 4)~k ~u × ~v = 4~i − 2~j − 4~k Propriedades do Produto Vetorial I. ~v × w ~ = −w ~ × ~v II. ~u × (~v + w) ~ = ~u × ~v + ~u × w ~ III. k(~v × w) ~ = (k~v ) × w ~ = ~v × (k w) ~ IV. ~i × ~i = ~j × ~j = ~k × ~k = 0 V. ~i × ~j = ~k; ~j × ~k = ~i; ~k × ~i = ~j VI. Se ~v × w ~ = 0 (~v e w ~ não nulos) então ~v e w ~ são paralelos 2.3 Aplicações Produto Escalar 1. Sabendo que um corpo se desloca do ponto A = (0, 0, 0) para o ponto B = (5, 4, 3), pois uma força F~ = 10~i + 8~j + 6~k atua sobre ele, e que o trabalho realizado por uma ~ determine W. força é dado por W = F~ · d, 9 −→ Solução: O vetor d~ = AB ⇒ B − A ⇒ (5, 4, 3) − (0, 0, 0) = (5, 4, 3) A força F~ = 10~i + 8~j + 6~k pode ser escrita como F~ = (10, 8, 6) ~ denotado por F~ · d~ O trabalho é dado pelo produto escalar de F~ e d, W = F~ · d~ W = (10, 8, 6) · (5, 4, 3) W = 10 × 5 + 8 × 4 + 6 × 3 = 50 + 32 + 18 = 100J Produto Vetorial 1. Uma partı́cula de carga −1, 6 · 10−19 C viaja a uma velocidade 3 · 108 m/s quando submetida a um campo magnético de 2, 08 · 1010 T . Qual a força que atua sobre esta partı́cula, sabendo que a direção de deslocamento é ortogonal ao campo? Solução: ~ ou ainda por Sabendo-se que a força magnética é dada por F~ = q · ~v × B, ~ · sen90o , temos: F~ = |q| · ~v · B F~ = | − 1, 6 · 10−19 | · (3 · 108 ) · (2, 08 · 1010 ) · 1 F~ ≈ 0, 8N 2. Dado um paralelogramo ABCD, onde A = (1, 2, 0), B = (2, 3, 1) e C = (1, 0, 4), determine a sua área. Solução: −→ −−→ Tomando o vetor AB e o vetor BC, temos que a área do paralelogramo é dada por: −→ −−→ A = |AB × BC| −→ AB = B − A ⇒ (2, 3, 1) − (1, 2, 0) = (1, 1, 0) e −−→ BC = C − B ⇒ (1, 0, 4) − (2, 3, 1) = (−1, −3, 3) −→ −−→ fazendo o produto vetorial, AB × BC, obtemos 1 u.a. 10 11 3 Autovalores e Autovetores Autovalores e autovetores são conceitos importantes de matemática, com aplicações práticas em áreas diversificadas como mecânica quântica, processamento de imagens, análise de vibrações, mecânica dos sólidos, estatı́stica, etc. Neste capı́tulo veremos as definições e aplicações dos autovalores e autovetores. 3.1 Definição Se A é a matriz n × n, então um vetor não-nulo x em Rn é chamado de um autovetor de A se A x é um múltiplo escalar de x, ou seja, Ax = λx (3.1) para algum escalar λ. O escalar λ é chamado um autovalor de A e dizemos que x é um autovetor associado a λ. Em R2 e R3 , a multiplicação por A manda cada autovetor x de A (se houver) sobre a mesma reta pela origem que x. Dependendo do sinal e da magnitude do autovalor λ associado a x, o operador linear Ax = λx comprime ou estica x por um valor λ, invertendo o sentido no caso de λ negativo, como a figura abaixo mostra. Exemplo 1. O vetor x = 1 2 é um autovetor de A= 3 0 8 −1 correspondendo ao autovalor λ = 3, pois Ax = 3 0 8 −1 1 2 = 3 6 = 3x Para encontrar os autovalores de uma matriz A de tamanho n × n nós reescrevemos Ax = λx como Ax = λIx (3.2) ou, equivalentemente, det(λI − A) = 0 Esta equação é a equação caracterı́stica de A; os escalares que satisfazem esta equação são os autovetores de A. Quando expandido, o determinante det(λI − A) é um polinômio p em λ que é chamado o polinômio caracterı́stico de A. Pode ser mostrado que se A é uma matriz n × n, então o polinônimo caracterı́stico de A tem grau n e o coeficiente de λn é 1, ou seja, o polinômio caracterı́stico p(x) de matriz n × n é da forma p(λ) = det(λI − A) = λn + c1 λn−1 + · · · + cn Pelo Teorema Fundamental da Álgebra segue que a equação caracterı́stica λn + c1 λn−1 + · · · + cn tem, no máximo, n soluções distintas, de modo que uma matriz n × n tem, no máximo, n autovalores distintos. 3.2 3.2.1 Exercı́cios Resolvidos Autovalores e Autovetores Questão 1. Dada a matriz A= 4 −5 2 −3 12 Calcule seus autovalores e autovetores Solução: Calculando os autovalores A= 4 −5 2 −3 ⇒ A − λI = 4−λ −5 −3 − λ 2 det(λI − A) = 0 (4 − λ)(−3 − λ) + 10 = 0 ⇒ λ2 − λ − 2 = 0 λ= √ 1± 9 2 ⇒ λ1 = −1 e λ2 = 2 Calculando os autovetores (A − λ1 I)x = 0 ⇒ (A − λ2 I)x = 0 ⇒ 3.3 3.3.1 5 −5 2 −2 2 −5 2 −5 x y x y = = 0 0 0 0 ⇒ x1 = ⇒ x1 = c c 5c 2c Aplicações Genética Caracterı́sticas Hereditárias: Vamos apenas analisar a herediriedade de animais ou plantas. Vamos supor que a caracterı́stica heriditária sob consideração é governada por um conjunto de dis genes, que nós denominamos A e a. Por hereditariedade autossômica cada indivı́duo de cada sexo possui dois destes genes, e os possı́veis pares são AA, Aa e aa. Este par de genes é chamado de o genótipo do indivı́duo e determina como o caráter controlado por estes genes se manisfeta no indivı́duo. Por exemplo, nas bocas-de-leão, um conjunto de dois genes controla a cor da flor. O genótipo AA produz flores vermelhas, o genótipo Aa produz flores roxas e o genótipo aa produz flores brancas. Nos humanos, a cor dos olhos é controlada por hereditariedda autossômica, Os genótipos AA e Aa têm olhos castanhos e o genótipo aa tem olhos azuis. Neste caso dizemos que o gene A domina o gene a, ou então que o gene a é recessivo em relação ao gene A, pois o genótipo A a apresenta a mesma caracterı́stica esterna que o genótipo AA. 13 Além da hereditariedade autossômica, nós também discutiremos a hereditariedade ligada ao sexo. Neste tipo de hereditariedade, o macho da espécie possui apenas um dos dois possı́veis genes ( A ou a) e a fêmea possu somente um par de dois dos possı́veis genes (AA, Aa ou aa). Nos humanos, o daltonismo, a calvice hereditária, a hemofilia e a distrofia muscular , para citar somente alguns, são caracterı́sticas controladas por hereditariedade ligada ao sexo. Hereditariedade Autossômica: Na hereditariedade autossômica, um in- divı́duo herda um dos genes de cada par de genes dos seus pais para formar seu próprio e particular par. Pelo que sabemos, é uma questão de sorte qual dos dois genes os pais passam aos filhos. Assim, se um dos pais é do genótipo Aa, é igualmente provável que o descendente herde o gene A ou o gene a daquele genitor. Se um dos pais é do genótipo aa e o outro genitor e do genótipo Aa, o descendente sempre receberá um gene a do genitor aa e receberá, com igual probabilidade, ou um gene A ou um gene a do genitor Aa. Consequentemente, cada descendente terá chances iguais de ser do genótipo Aa ou aa. Na tabela 1 nos listamos as probabilidades dos possı́veis genótipos dos descendentes para todas as prováveiscombinações de genótipos dos pais. Exemplo 1. Suponha que um agricultor tem uma grande população de plantas consistindo de alguma distribuição de todos os três possı́veis genótipos AA, Aa e aa. O agricultor deseja implementar um programa de criação no qual cada planta da população é sempre fertilizada por um genótipo AA. Nós queremos deduzir uma expressão para a distribuição dos três genótipos na população depois de um número qualquer de gerações. Para n = 0, 1, 2..., vamos escrever an = fração de plantas do genótipo AA na n-ésima geração bn = fração de plantas do genótipo Aa na n-ésima geração cn = fração de plantas do genótipo aa na n-ésima geração Assim, a0 , b0 e c0 especificam a distribuição inicial dos genótipos. Nós temos que 14 an + bn + cn = 1, para n = 0, 1, 2, ... Pela Tabela 1 nós podemos determinar a distribução de genótipos em cada geração e a partir da distribuição na geração precedente, pelas seguintes equações: an = an−1 + 21 bn−1 bn = cn−1 + 12 bn−1 n = 1, 2, ... cn = 0 Por exemplo, primeira destas três equações afirma que todos os descedentes de uma planta do genótipo AA serão do genótipo AA neste programa de criação e metade dos descendentesde uma planta do genótipo A a será do genótipo AA. As equações (1) podem ser escritas em notação matricial como: x(n) = M xn−1 , n = 1, 2, ... onde an an−1 x(n) = bn , xn−1 = bn−1 cn−1 cn 1 1 2 0 e M = 0 12 1 0 0 0 Observe que as três colunas da matriz M são iguais à três primeiras colunas da Tabela 1. Da equação (2) segue que x(n) = M xn−1 = M 2 xn−2 = · · · = M n x(0) Consequentemente, se nós encontrarmos uma expressão explı́cita para M (n) , nós podemos usar (3) para encontrar uma expressão explı́cita para x(n) . Para encontrar uma expressão explı́cita para M (n) , nós primeiro diagonalizamos M , ou seja, procuramos uma matriz invertı́vel P e uma matriz diagonal D tais que: M (n) = P DP −1 Com esta diagonalização, nós teremos então M (n) = P Dn P −1 para n = 1, 2, ... 15 onde Dn = λ1 0 ··· 0 n 0 0 .. . λ2 .. . 0 ··· .. . . . . 0 .. . 0 0 0 ··· λk λn1 0 0 ··· 0 0 = .. . 0 λn2 .. . 0 ··· .. . . . . 0 .. . 0 0 ··· λnk A diagonalização de M é obtida encontrando os autovalores e correspondentes autovetores. Segue-se que x (n) n = PD P 1 1 1 1 0 0 1 1 1 a0 1 n x 0) = 0 −1 −2 0 ( 2 ) 0 0 −1 −2 b0 0 0 1 0 0 0 0 0 1 c0 −1 ( Lembrando que an + bn + cn = 1, nós obtemos an = 1 − ( 21 )n b)0 − ( 21 )( n − 1)c0 bn = ( 12 )n b)0 + ( 12 )( n − 1)c0 n = 1, 2, ... cn = 0 Estas são fórmulas explı́citasparaa fração dos três genótipos na n-ésima geração deplantas em termos das frações de genótipos iniciais. Como 1n 2 tende a zero quando n tende ao infinito, segue destas equações an → 1 bn → 0 cn = 0 quando n tende ao infinito. Isto mostra que no limite de todas as plantas da população serão do genótipo AA. 16 17 4 Sistemas de Equações Lineares Qualquer linha reta no plano xy pode ser representada algebricamente por uma equação na forma a1 x + a2 y = b (4.1) onde a1 , a2 e b são constantes reais e a1 e a2 não são ambas nulas. Uma equação desta forma é chamada de equação linear nas variáveis x e y. Mais geralmente, nós definimos uma equação linear nas n variáveis x1 , x2 , ..., xn como uma equação que pode ser expressa na forma a1 x + a2 x 2 + · · · + an x n = b (4.2) onde a1 , a2 , ..., an e b são constantes reais. As variáveis de uma equação linear são, muitas vezes, chamadas incógnitas. Exemplo 1. As equações x + 3y = 7, y = 21 x + 3z + 1 e x1 + 2x2 − 3x3 + x4 = 7 são lineares. Observe que uma equação linear não envolve quaisquer produtos ou raı́zes variáveis. Todas as variáveis ocorrem somente na primeira potência e não aparecem como argumentos de funções trigonométricas, logarı́tmicas ou exponenciais. As equações √ x + 3 y = 5, 3x + 2y − z + xz = 4 e y = senx são não-lineares. Uma solução de uma equação linear a1 x1 + a2 x2 + · · · + an xn = b é uma sequência de n números s1 , s2 , ..., sn tais que a equação é satisfeita quando substituı́mos x1 = s1 , x2 = s2 , ..., xn = sn . O conjunto de todas as soluções de uma equação é seu conjunto-solução ou, às vezes, a solução geral da equação. 4.1 Eliminação Gaussiana O Método de Eliminação de Gauss (MEG) é um algoritmo sistemático e eficaz que permite determinar a solução geral de qualquer SEL m × n. A implementação deste método tem por base a aplicação sucessiva de um conjunto de operações (denominadas operações elementares) que transformam o SEL inicial num SEL mais simples mas com a mesma solução geral que o SEL de partida. Por definição, as operações elementares que se podem aplicar a um SEL são as seguintes: • Multiplicação de uma equação do SEL por qualquer número real não nulo; • Troca da ordem de duas equações do SEL; • Soma de uma equação do SEL com um múltiplo de outra das equações do SEL. 4.2 Solução por Matriz Inversa Consideremos o sistema com expressão geral dado abaixo e que tem n equações lineares com n incógnitas: a11 x1 + a12 x2 + a13 x3 + · · · + a1n xn a21 x1 + a22 x2 + a23 x3 + · · · + a2n xn a31 x1 + a32 x2 + a33 x3 + · · · + a3n xn ································· a31 x1 + a32 x2 + a33 x3 + · · · + a3n xn Que pode ser escrito na forma matricial A · X = B. A matriz A chama-se matriz do sistema, tem dimensão n × n e seus elementos são os coeficientes das incógnitas. A matriz X é uma matriz coluna, de dimensão n × 1, formada pelas incógnitas do sistema. Por último, a matriz B é uma outra matriz coluna, de dimensão n × 1, formada pelos termos independentes. Assim: A · X = B ⇔ A−1 · A · X = A−1 · B ⇔ X = A−1 · B 4.3 Exercı́cios Resolvidos Questão 1. Com base no sistema linear abaixo é possı́vel afirmar: x + 2x2 + 3x3 = 5 1 2x1 + 5x2 + 3x3 = 3 x + 8x = 17 1 3 18 I. O sistema é possı́vel e determinado II. S1 = (1, −1, 2) é uma solução particular do sistema. III. O sistema é impossı́vel 40 16 9 IV. A matriz inversa dos coeficientes é: 13 −5 −3 5 −2 −1 Solução: I. Verdadeira, pois o determinante da matriz dos coeficiente é diferente de zero 0 (exercı́cio ao leitor) II. Verdadeira, pois: 1 2 3 1 0 0 2 1 1 0 0 1 0 0 1 0 0 1 0 0 40 13 5 5 3 0 1 0 L2 = L2 − 2L1 e L3 = L3 − L1 0 8 0 0 1 2 3 1 0 0 1 −3 −2 1 0 L1 = L1 − 2L2 e L3 = L3 + 2L2 −2 5 −1 0 1 2 3 1 0 0 1 −3 −2 1 0 L3 = L3 (−1) −2 5 −1 0 1 0 9 5 −2 0 1 −3 −2 1 0 L1 = L1 − 9L3 e L2 = L2 + 3L3 0 1 5 −2 −1 0 0 40 16 9 1 0 13 −5 −3 0 1 5 −2 −1 16 9 5 1 × = −5 −3 3 −1 −2 −1 17 2 III. Falsa, comprovada pela proposição I. IV. Verdadeira, comprovada na proposição II. 19 Questão 2 (proposta). Com base no sistema linear abaixo é possı́vel afirmar: x + 2x2 + x3 = −1 1 x1 − x2 + x3 = 4 x + x = 17 1 2 I. O sistema não é possı́vel e determinado. II. Substituindo os valores dos termos independentes por (b1 = 5, b2 = 0, b3 = 0) os valores que x assumirá será (x1 = −5/3,x2 = 5/3, x3 = 10/3) −1/3 1/3 1 III. A matriz inversa dos coeficientes é: 1/3 −1/3 0 2/3 1/3 −1 IV. Substituindo os valores dos termos independentes por (b1 = −1, b2 = −1, b3 = 3) os valores que x assumirá será (x1 = 3, x2 = 0, x3 = 2) V. S1 = (16/3, −4/3, −11/3) é uma solução particular do sistema. 4.4 4.4.1 Aplicações Redes Elétricas Questão 1. Encontre o valor das correntes no circuito abaixo Suponhamos que em um circuito elétrico temos 3 correntes elétricas especificadas I1 , I2 e I3 . Aplicando a lei de corrente de Kirchhoff aos pontos A e B, obtemos: 20 I1 = I2 + I3 (Ponto A) I3 + I2 = I1 (Ponto B) Como ambas estas equações simplificam à mesma equação linear I1 − I2 − I3 = 0 (1) Nós precisamos de mais duas equações para determinar I1, I2 e I3 de modo único. Estas equações serão obtidas com a Lei de Voltagem de kirchhoff. Para aplicar a lei de voltagem de Kirchhoff a um circuito fechado, selecione um sentido positivo em torno do circuito (digamos, sentido horário) e faça a seguinte convenção de sinais: • Uma corrente passando por um resistor produz uma diferença de potencial positiva se flui no sentido positivo do circuito e uma diferença de potencial negativa se flui no sentido negativo do circuito. • Uma corrente passando por um capacitor produz uma diferença de potencial positiva se o sentido positivo do circuito é de + para - e uma diferença de potencial negativa se o sentido positivo do circuito é de - para +. Aplicando a Lei de Kirchhoff e a Lei de Ohm à malha interna da figura, obtemos 7I1 + 3I3 − 30 = 0 (2) E a malha interna 2, obtemos 11I2 − 3I3 − 50 = 0 (3) Combinando (1), (2) e (3) resulta o sistema linear I − I2 − I3 = 0 1 7I1 + 3I3 = 30 11I − 3I = 50 2 3 Resolvendo este sistema linear obtemos os seguintes valores para as correntes I1 = 570/131(A), I2 = 590/131(A), I3 = −20/131(A) 21 4.4.2 Balanceamento de Equações Quı́micas Questão 1. A combustão de amônia (N H3 ) em oxigênio produz nitrogênio (N2 ) e água. Encontre uma equação quı́mica balanceada para essa reação. Solução: wN H3 + xO2 → yN2 + zH2 O Comparando os números de átomos de nitrogênio, hidrogênio e oxigênio nos reagentes e nos produtos, obtemos o seguinte sistema de equações: Nitrogênio: w = 2y Hidrogênio: 3w = 2z Oxigênio: 2x = z Desta forma, montando o sistema, temos: w - 2y = 0 3w - 2z = 0 2x - z = 0 cuja solução é 4N H3 + 3O2 → 2N2 + 6H2 O 4.4.3 Matemática aplicada Questão 1. Dois alunos ao comparem suas notas perceberam algo de estranho, Joãozinho tirou 1 ponto na prova A e 1 ponto na prova B, já Pedrinho tirou 5 pontos na prova A e 6 na prova B e obtiveram, respectivamente, notas 2 e 9. Qual seria o peso de cada prova? Solução: 1 1 1 0 L2 = L2 − 5L1 5 6 0 1 22 1 1 1 0 L1 = L1 − L2 0 1 −5 1 1 0 6 −1 0 1 −5 6 −5 −1 1 1 × 2 9 = 3 1 Logo, os pesos são 3 e 1. 23 24 5 Conclusão Com o trabalho realizado pudemos rever os conceitos e assuntos abordados no programa semestral da matéria Geometria Analı́tica e Álgebra Linear, os quais são fundamentais para uma sólida formação matemática, indispensável para o curso de engenharia elétrica e áreas afins. Tivemos uma oportunidade ı́mpar de, além de revisar conceitos já vistos anteriormente, conhecer algumas das aplicações destes em campos de estudo e pesquisa, quebrando o contexto teórico em que são aplicados esses conteúdos, fazendo com que haja um maior interesse por estes e conseqüentemente uma maior absorção. Por exemplo, saber que assuntos como autovalores e autovetores são utilizados na investigação da propagação de uma caracterı́stica herdada em sucessivas gerações (Genética) e que os conceitos dos sistemas lineares são utilizados para resolver problemas através da Interpolação Spline Cúbica aumenta a importância dada a esses assuntos e traz motivação aos seu estudo. Essa atividade foi fundamental para mostrar que matemática não é apenas teoria, e suas aplicações são fundamentais tanto para a engenharia quanto para a medicina, para a arte entre outras áreas, e com isso seu estudo dedicado é peça indispensável para profissional de sucesso. Referências Bibliográficas [1] Callioli, Carlos A., Álgebra Linear e Aplicações, Atual, São Paulo, 1990. [2] Anton, H., Rorres, C., Álgebra Linear com Aplicações, Bookman, Porto Alegre, 2001. [3] Lipschutz, S. Álgebra Linear, Makron Books, 1994 (Coleção Schaum). [4] Steinbruch, A., Winterle, P. Álgebra Linear, Makron Books. [5] Boldrini/Costa/Figueiredo/Wetzler. Álgebra Linear. Harbra, 1980.
Baixar