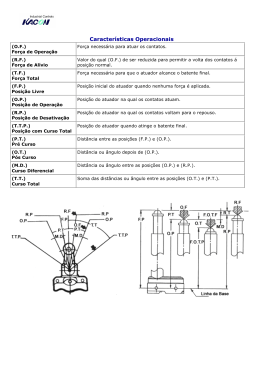
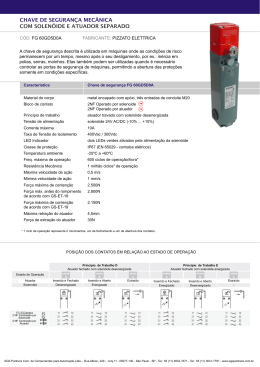
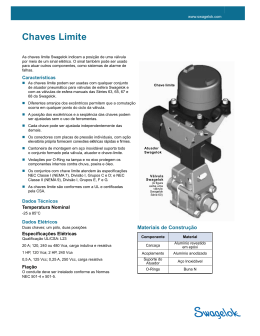
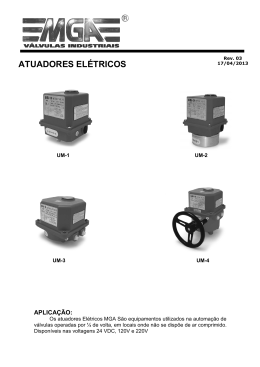
Trabalho de Conclusão de Curso Dezembro de 2009, São Paulo-SP, Brasil NUSP: 5432554 ATUADOR POR EXPANSÃO E CONTRAÇÃO SÚBITA Decio Romeu Kono Shiro [email protected] Fabio Yuzo Ueno [email protected] Orientador: Prof. Dr. Oswaldo Horikawa [email protected] Resumo O objetivo do presente trabalho é o estudo e a implementação de um Impact Drive Mechanism (IDM) que se movimenta pela expansão e contração súbita utilizando um atuador pneumático controlável. O IDM é um método de movimentar objetos através do atrito e do impulso dado pelo atuador. O mecanismo possui apenas 1 grau de liberdade, mas é possível combinar vários dispositivos e conseguir diferentes movimentos (com até 6 graus de liberdade). O IDM existe em pequenas dimensões para movimentos nanométricos, dando precisão ao movimento. Porém, este projeto visará à implementação desse mecanismo em dimensões maiores. As principais aplicações do IDM são em braços de robôs, sistema de centralização em suportes rotativos, dispositivo para posicionamento de placas impressas, máquinas onde é necessária precisão de movimento. Palavras chave: Mecanismo de Acionamento por Impacto, Pistão Pneumático, Válvula Solenóide, Atuador por Expansão e Contração. ****************************** 1.Introdução O atuador por expansão e contração súbita é um mecanismo desenvolvido para movimentar um corpo através da rápida expansão ou contração de um corpo, através de um atuador. O estudo desse mecanismo já foi desenvolvido por Toshiro Higuchi utilizando um atuador piezoelétrico. No entanto, neste projeto será utilizado um atuador pneumático. O atuador por expansão e contração piezoelétrico é muito utilizado na micro robótica devido a sua alta precisão de posicionamento (nanométrica) e estrutura simples. Devido também ao seu fácil manuseio e implementação, é possível combinar vários dispositivos e aumentar o numero de graus de liberdade. O método de movimento por expansão e contração súbita que estamos querendo desenvolver neste projeto, recebe o nome técnico de Impact Drive Mechanism (IDM). Esse método utiliza o atrito estático e a força impulso dado pelo atuador para movimentar o mecanismo. O mecanismo é composto por um corpo principal, um atuador e uma massa menor. 2.Metodologia O princípio de movimento do mecanismo é muito simples. A rápida expansão do atuador faz com que uma força impulso gerada pelo atuador, supere a força atrito estático no corpo principal e o movimenta em direção contrária. Quando a contração é feita de forma lenta, a força inercial é menor que o atrito estático, portanto o corpo principal permanece imóvel, movimentando apenas a massa menor. O movimento pode ser feito em sentido contrário se a expansão for lenta e a contração for rápida. Trabalho de Conclusão de Curso - Dezembro de 2009; Coordenadores: Prof. Dr. Lucas Moscato e Prof. Dr. Edson Gomes; Escola Politécnica da Universidade de São Paulo; Depto. Engenharia Mecatrônica e de Sistemas Mecânicos; Disciplinas: PMR2500 e PMR2550 Av. Prof. Mello Moraes 2231 CEP 05508-900 São Paulo – SP Figura 3: Atuador Higuchi (Ref. [1]) Figura 1: Princípio de movimento O processo do movimento ocorre da seguinte forma: a) O ciclo começa com o atuador estendido b) O atuador contrai lentamente para que apenas o peso menor se mova. c) Fim da contração. d) Uma súbita expansão do atuador causa uma força inercial impulsiva que move o corpo principal. e) Fim da expansão e o ciclo recomeça. Deste modo, para testes iniciais serão usados cilindros de alumínio de 77 mm de diâmetro, sendo um com 77 mm e o outro com 30 mm de comprimento. Este tamanho foi definido de acordo com a força que o pistão consegue exercer sobre as massas. O alumínio foi escolhido por ser um material de fácil usinagem. A densidade do alumínio é de 2697 kg/m3. As massas são de aproximadamente de 900g a massa maior e 350g a massa menor. 3.1.Pistão pneumático 3.Protótipo Figura 4: Construção interna do pistão (Ref. [5]) Neste projeto será utilizado um Pen-Cylinder de dupla ação da marca Koganei. Figura 2: Protótipo 3.2.Válvula Solenóide Para o projeto do protótipo foi considerado o estudo do atuador Higuchi para achar uma proporção entre as massas: Trabalho de Conclusão de Curso - Dezembro de 2009; Coordenadores: Prof. Dr. Lucas Moscato e Prof. Dr. Edson Gomes; Escola Politécnica da Universidade de São Paulo; Depto. Engenharia Mecatrônica e de Sistemas Mecânicos; Disciplinas: PMR2500 e PMR2550 Av. Prof. Mello Moraes 2231 CEP 05508-900 São Paulo – SP controlar a válvula solenóide através das pontes H do CI L298. De acordo com o sinal do computador, as válvulas irão se alternar, mantendo sempre uma aberta e a outra fechada, movimentando assim o pistão. O sinal do computador irá também controlar a velocidade do pistão para que tenha uma expansão súbita e uma contração lenta ou uma contração súbita e uma expansão lenta. 5. Testes Figura 5: Construção interna da válvula (Ref. [6]) Neste projeto será utilizada a válvula solenóide 030E1 da marca Koganei. Esta válvula foi escolhida pois funciona com uma pressão de até 0.7 Mpa o que é suficiente para o nosso projeto. Como é uma válvula 3/2 vias, serão utilizadas duas válvulas para o controle do pistão. Elas se alternarão no funcionamento de acordo com o controle via computador. M oviment o para Direita 180 160 140 120 100 80 60 40 20 0 0 2 4 6 8 10 12 10 12 P assos 4. Acionamento Gráfico 1: Movimento para direita M oviment o para Esquerda 160 140 120 100 80 60 40 20 0 0 2 4 6 8 P assos Gráfico 2: Movimento para esquerda Figura 6: Esquema de Acionamento O acionamento do pistão ocorrerá da seguinte forma: um programa em linguagem C do computador gerará um sinal via porta paralela para o circuito controlador. O circuito irá 6. Conclusões A partir dos testes realizados foi verificado o deslocamento é máximo quando o delay entre os pulsos na movimentação lenta é de 22ms para a esquerda e 35ms para a direita. A diferença dos tempos e do deslocamento deve-se à diferença nos solenóides e à diferença no impacto na contração e na expansão. Foi testado o acoplamento do dispositivo a um carrinho com resultado satisfatório. Assim, fica Trabalho de Conclusão de Curso - Dezembro de 2009; Coordenadores: Prof. Dr. Lucas Moscato e Prof. Dr. Edson Gomes; Escola Politécnica da Universidade de São Paulo; Depto. Engenharia Mecatrônica e de Sistemas Mecânicos; Disciplinas: PMR2500 e PMR2550 Av. Prof. Mello Moraes 2231 CEP 05508-900 São Paulo – SP confirmada a possibilidade de movimentação de massas ainda maiores. [4] Katsushi Furutani, Naotake Mohri and Toshiro Higuchi. “DESIGN NOTE - A built-in displacement sensor for an impact drive mechanism” - Meas. Sci. technol. 10 (1999). [5] Koganei, Actuators General Catalog – Pen Cylinder. <http://ww1.koganei.co.jp/en/shop/goods/series. aspx?category=A060010000> Acesso em 10 de Junho de 2009. [6] Koganei, Valves General Catalog – Solenoids Valves 030 Series. <http://ww1.koganei.co.jp/en/shop/goods/series. aspx?category=B010060000> Acesso em 10 de Junho de 2009. Referências Bibliográficas [1] T.Higuchi, Y.Yamagata, K.Furutani, and K.Kudoh "Precise positioning mechanism utilizing rapid deformations of piezoelectric elements", Proc. of IEEE Workshop on Micro Electro Mechanical Systems, pp.47-51 (1990) [2] Advanced Mechatronic Lab. Disponível em <http://www.aml.t.utokyo.ac.jp/research/pidm/pidm_e.html> Acesso 04 de Abril de 2009. [3] Effect of Lubrification on Impact Drive Mechanism. Precision Engeneering 22: 78-96, 1998. Elsevier Science Inc. =========================================================================== SUDDEN EXPANSION AND CONTRACTION ACTUATOR Abstract The objective of this work is the study and implementation of an Impact Drive Mechanism (IDM) that moves through the sudden expansion and contraction using a controllable pneumatic actuator. The IDM is a method of moving objects by friction and the impetus of the actuator. The mechanism has only 1 degree of freedom, but you can combine multiple devices and get different movements (up to 6 degrees of freedom). The IDM already exists on small dimensions for nanometric movements. However, this project will target the implementation of this mechanism in larger dimensions. The main applications of the IDM are in the arms of robots, system centralization in rotation device for positioning of printed wiring boards, machines where it is needed precision of movement. Keywords: Impact Drive Mechanism, Pneumatic Actuator, Solenoid Valve, Expansion Contraction Actuator. Trabalho de Conclusão de Curso - Dezembro de 2009; Coordenadores: Prof. Dr. Lucas Moscato e Prof. Dr. Edson Gomes; Escola Politécnica da Universidade de São Paulo; Depto. Engenharia Mecatrônica e de Sistemas Mecânicos; Disciplinas: PMR2500 e PMR2550 Av. Prof. Mello Moraes 2231 CEP 05508-900 São Paulo – SP
Baixar