TRANSFORMAÇÕES LINEARES
♦ Transformação Linear
Sejam V e W espaços vetoriais reais. Dizemos que uma função T : V → W é uma transformação linear
se a função T preserva as operações de adição e de multiplicação por escalar, isto é, se os seguintes
axiomas são satisfeitos:
TL1. Para quaisquer v, u ∈ V , T (v + u) = T (v ) + T (u ) .
TL2. Para todo v∈V e para todo k ∈ R , T (k ⋅ v) = k ⋅ T ( v ) .
Exemplos:
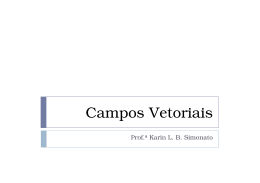
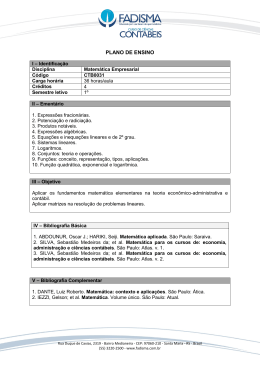
1) T : R 2 → R 2
( x , y ) a T ( x, y ) = ( − x, − y )
Verificando os axiomas:
TL1. T (( x , y ) + ( z , t )) = T ( x, y ) + T ( z, t) , para quaisquer ( x , y ), ( z, t ) ∈ R 2 ?
T ((x, y ) + ( z, t)) = T ( x + z, y + t ) = (−( x + z ),− ( y + t )) = (− x − z,− y − t)
T ( x , y ) + T ( z, t ) = ( − x,− y ) + (− z,− t ) = (− x − z ,− y − t )
Assim, a transformação linear T preserva a operação de adição de vetores.
TL2. T (k ⋅ ( x, y )) = k ⋅ T ( x , y ) , para todo ( x , y ) ∈ R 2 e para todo k ∈ R ?
T (k ⋅ ( x, y )) = T ( kx, ky ) = (− (kx ),−(ky )) = (k ( − x ), k ( − y )) = k ⋅ ( − x,− y ) = k ⋅ T ( x, y )
Assim, a transformação linear T preserva a operação de multiplicação por escalar.
Considere v = (1,2 ) e u = ( −1,3) .
T (v ) = T (1,2) = (−1, −2)
T (u ) = T ( −1,3) = (1, −3)
T (v ) + T (u ) = ( −1,−2 ) + (1, −3) = (0,−5)
T (v + u) = T ((1,2) + (−1,3)) = T (0,5) = (0, −5)
T (2 ⋅ v ) = T (2 ⋅ (1,2 )) = T (2,4) = (−2,−4 ) = 2 ⋅ (−1,−2) = 2 ⋅ T (1,2) = 2 ⋅ T ( v )
Y
Y
(x, y)
y
x
X
T
-x
T(x, y)=(-x, -y)
X
-y
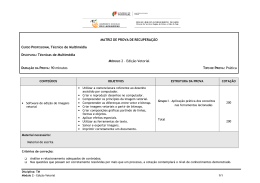
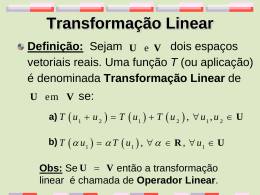
2) T : R 3 → R 3
( x, y , z ) a T ( x, y, z) = ( x , y ,0)
T é uma transformação linear (Verifique !)
Esta transformação linear associa a cada vetor do R3 sua projeção ortogonal sobre o plano XY.
61
Z
Z
(x, y, z)
Y
T
Y
T(x, y, z)=(x, y, 0)
X
X
A transformação linear T0 : V → W tal que v a T 0 ( v ) = 0W é denominada Transformação Nula.
Seja a transformação linear T : V → W . Se os conjuntos V e W são iguais, V = W , então T é
denominada um Operador Linear.
O operador linear I V : V → V tal que v a I V (v ) = v é denominado Operador Identidade.
As transformações lineares T : V → R são denominadas Funcionais Lineares.
Propriedades
1. Se T : V → W é uma transformação linear então T (0V ) = 0W .
dem.: T (0 V ) = T ( 0V + 0V ) = T (0 V ) + T (0 V ) .
Mas, T (0 V ) = T (0V ) + 0 W , pois T (0 V ) ∈ W e 0W é o elemento neutro em W.
Assim, , T (0 V ) + T (0V ) = T (0 V ) + 0W .
Logo, T (0V ) = 0W .
Portanto, se T (0V ) ≠ 0W então T não é uma transformação linear.
No entanto, o fato de T (0V ) = 0W não é suficiente para que T seja linear.
Por exemplo, T : R 2 → R 2 tal que T ( x , y ) = ( x 2 , y 2 ) .
T (1,2) = (12 ,2 2 ) = (1,4 )
T (3,5) = (3 2 ,5 2 ) = (9,25)
T (1,2) + T (3,5) = T (10,29)
T ((1, 2) + (3,5)) = T (4,7) = ( 4 2 ,7 2 ) = (16,49)
Assim, T (v + u) ≠ T (v ) + T (u )
Embora, T (0,0) = (0,0) , T não é uma transformação linear.
2. Seja T : V → W uma transformação linear.
Então T (k 1 ⋅ v1 + k 2 ⋅ v 2 + ... + k n ⋅ v n ) = k 1 ⋅ T (v1 ) + k 2 ⋅ T ( v 2 ) + ... + k n ⋅ T (v n )
v1 , v 2 ,..., v n ∈V e para quaisquer k1 , k 2 ,..., k n ∈ R .
para quaisquer
Corolário: Sabendo-se as imagens dos vetores de uma base do espaço vetorial V é possível
determinar a transformação linear T : V → W .
62
Obtendo a Lei de uma Transformação Linear
Seja T : R 2 → R 2 um operador linear tal que T (2,3) = (−1,5) e T (0,1) = (2,1) . Como encontrar a lei
que define este operador?
Solução:
{(2,3), (0,1)} é base para R2 .(Verifique!)
Portanto, qualquer vetor v ∈ R 2 pode ser escrito como combinação linear destes vetores.
v = ( x , y ) = k 1 ⋅ (2,3) + k 2 ⋅ (0,1) com k1 , k 2 ∈ R .
= ( 2k1 ,3k 1 ) + (0, k 2 )
= ( 2k1 ,3k 1 + k 2 )
Assim, x = 2k1 e y = 3k1 + k 2 .
x
2 y − 3x
Então, k1 = e k 2 =
.
2
2
2 y − 3x
x
Logo, ( x, y ) = ( 2,3) +
(0,1) .
2
2
Aplicando o operador linear,
2 y − 3x
x
T ( x , y ) = T ( (2,3) +
(0,1))
2
2
x
2 y − 3x
= ⋅ T ( 2,3) +
⋅ T (0,1)
2
2
x
2 y − 3x
= ⋅ ( −1,5) +
⋅ (2,1)
2
2
x 5x
2 y − 3x
= ( − , ) + ( 2 y − 3 x,
)
2 2
2
− 7x + 4 y
=(
, x + y)
2
− 7x + 4 y
Logo, T ( x , y ) = (
, x + y) .
2
♦ Operadores Lineares no Espaço Vetorial R2
Reflexão em torno do eixo X: T ( x, y ) = ( x,− y ) .
Reflexão em torno do eixo Y: T ( x , y ) = ( − x , y ) .
Reflexão em torno da origem: T ( x , y ) = (− x, − y ) .
Y
v+u
v
u
X
T(u)
T(v+u)
T(v)
63
Reflexão em torno da reta x = y : T ( x , y ) = ( y , x ) .
Reflexão em torno da reta x = − y : T ( x , y ) = (− y ,− x) .
Dilatação ou Contração de fator k na direção do vetor: T ( x , y ) = (kx, ky ) com k ∈ R .
Se k > 1 : dilatação.
T(v+u)
Y
T(v)
v+u
v
T(u)
u
X
Se k < 1 : contração.
Se k < 0 : troca de sentido.
Se k = 1 : operador identidade.
Dilatação ou Contração de fator k na direção do eixo X: T ( x , y ) = (kx, y ) com k ∈ R, k > 0 .
Se k > 1 : dilatação.
Se 0 < k < 1 : contração.
Dilatação ou Contração de fator k na direção do eixo Y: T ( x , y ) = ( x, ky ) com k ∈ R, k > 0 .
Se k > 1 : dilatação.
Se 0 < k < 1 : contração.
Cisalhamento na direção do eixo X: T ( x , y ) = ( x + ky , y ) com k ∈ R .
Y
v+u
u
v
T(v+u)
T(u)
T(v)
X
Cisalhamento na direção do eixo Y: T ( x , y ) = ( x, kx + y ) com k ∈ R .
64
Rotação: T ( x , y ) = ( x cosθ − y sen θ , x sen θ + y cos θ ) com 0 ≤ θ ≤ 2π .
Y
T(v+u)
T(u)
v+u
T(v)
v
u
X
♦ Núcleo e Imagem de uma Transformação Linear
Núcleo de uma transformação linear T : V → W é o conjunto de vetores do espaço vetorial V cuja
imagem é o vetor 0W .
Notação: N (T ) = Ker(T ) = {v ∈V | T (v ) = 0 W }
Imagem de uma transformação linear T : V → W é o conjunto de vetores de W que são imagem dos
vetores do conjunto V.
Notação: Im( T ) = T (V ) = {w ∈ W | T (v ) = w, para algum v ∈ V }
V
T
W
Im(T)
N(T)
0W
Propriedades
1. N (T ) é um subespaço vetorial de V.
2. Im(T ) é um subespaço vetorial de W.
3. Teorema do Núcleo e da Imagem : dimV = dim N (T ) + dim Im( T )
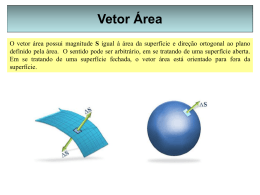
Exemplo: Seja T : R 2 → R 3 tal que T ( x, y ) = (0, x + y ,0) .
N (T ) = {( x , y ) ∈ R 2 | T ( x, y ) = (0,0,0)} .
Então, T ( x , y ) = (0, x + y,0) = (0,0,0) .
Assim, x + y = 0 ∴ x = − y .
Portanto, N (T ) = {( x , y ) ∈ R 2 | x = − y} = {(− y, y ), y ∈ R} .
Uma base é {(−1,1)} e dim N (T ) = 1 .
65
Representação gráfica,
Z
Y
(0,0,0)
X
Y
X
N(T) : x+y=0
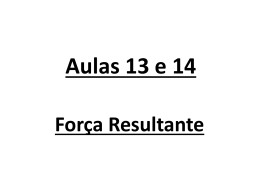
Im( T ) = {T ( x, y ) = (0, x + y,0), para todo ( x, y ) ∈ R 2 }
Uma base para o conjunto imagem é {(0,1,0)} e dim Im( T ) = 1 .
Y
Z
R2
X
T
Y : Im(T)
X
Observe que, dim R 2 = dim N (T ) + dim Im( T ) , isto é, 2 = 1 + 1 .
♦ Transformação Linear Injetora
Uma transformação linear T : V → W é injetora, se para quaisquer v, u ∈ V , se v ≠ u então
T (v ) ≠ T (u ) . O que é equivalente a, se T (v ) = T (u ) então v = u .
Exemplo:
1) A transformação linear T : R 2 → R 3 tal que T ( x , y ) = ( x , y , x + y ) é injetora.
Sejam ( x , y ), ( z, t ) ∈ R 2 .
Se T ( x , y ) = T ( z , t ) ∴( x, y, x + y ) = ( z , t, z + t ) .
x = z
Então y = t
x + y = z + t
Logo, ( x , y ) = ( z, t ) .
2) Seja o operador linear no R3 tal que T ( x , y , z ) = ( x,0,0) , que associa a cada vetor sua projeção
ortogonal no eixo X.
66
Considere os vetores (2,1,3) e (2,0,−4 ) .
Assim, T (2,1,3) = T ( 2,0,−4) = (2,0,0) .
Então, T não é injetora, pois T (v ) = T (u ) com v ≠ u .
Teorema: Uma transformação T : V → W é injetora se e somente se N (T ) = {0 V } .
Assim, basta verificar se N (T ) = {0 V } para garantir que uma transformação linear T é injetora.
Exemplo: Seja o operador linear em no R 2 tal que T ( x , y ) = (2 x, x + y ) é injetora, pois:
N (T ) = {( x , y ) ∈ R 2 | T ( x , y ) = (0,0)} = {( x, y ) ∈ R 2 | (2 x, x + y ) = (0,0)} .
2 x = 0
Assim,
x + y = 0
Então, N (T ) = {(0,0)} .
♦ Transformação Linear Sobrejetora
Uma transformação linear T : V → W é sobrejetora se o conjunto imagem de T é o conjunto W, isto é,
Im( T ) = W .
Exemplo: O operador linear em R2 do exemplo anterior é injetor.
Então, dim N (T ) = 0 .
Pelo Teorema do Núcleo e da Imagem, dim R 2 = dim N (T ) + dim Im( T ) .
Assim, 2 = 0 + dim Im( T ) ∴dim Im( T ) = 2 .
Logo, Im(T ) = R 2 .
♦ Transformação Linear Bijetora – Isomorfismo
Uma transformação linear T : V → W é bijetora quando for injetora e sobrejetora. Transformações
lineares bijetoras são também denominadas isomorfismos e, conseqüentemente, V e W são denominados
espaços vetoriais isomorfos.
Exemplos:
1) T : R 2 → R 2 tal que T ( x, y ) = ( y, − x ) .
2) I V : V → V tal que I V (v ) = v .
x y
3) T : Mat 2×2 (R ) → R 4 tal que T (
) = (t , z, y , x ) .
z t
Uma transformação T : V → W é denominada de transformação invertível quando existir uma
transformação T −1 : W → V tal que T o T −1 = I W e T −1 o T = I V . A transformação T −1 é denominada
a transformação inversa de T.
Teorema: Seja T : V → W uma transformação. A transformação T é bijetora se e somente se for
invertível.
Teorema: Seja T : V → W uma transformação linear invertível. Então a transformação T −1 : W → V é
linear.
Assim, transformações lineares bijetoras são transformações lineares invertíveis.
67
W
V
T
T(v)=w
v=T-1(w)
T-1
Obtendo a Lei da Transformação Linear Inversa T −1
Seja o operador linear T : R 2 → R 2 tal que T ( x , y ) = ( 2 x, − y ) . O operador linear inverso T −1 será
obtido da maneira a seguir:
{(1,0), (0,1)} é uma base para R2.
T (1,0) = (2,0) e T (0,1) = (0, −1) .
Portanto, T −1 (2,0) = (1,0) e T −1 (0,−1) = (0,1) .
Obtendo a lei de T −1 : ( x , y ) = k1 ⋅ (2,0) + k 2 ⋅ (0, −1) = (2 k1 ,0) + (0,− k 2 ) = (2 k1 ,− k 2 ) .
x = 2 k1
Assim,
y = −k 2
x
Tem-se que, k1 = e k 2 = − y .
2
x
Então, ( x, y ) = 2 ⋅ ( 2,0) + ( − y ) ⋅ (0, −1) .
T −1 ( x, y ) = T −1 ( 2x ⋅ (2,0) + (− y ) ⋅ (0,−1))
= x2 ⋅ T −1 (2,0) + ( − y ) ⋅ T −1 (0,−1)
= x2 ⋅ (1,0) + (− y ) ⋅ (0, −1)
= (2x ,− y )
Logo, a lei é T −1 ( x, y ) = (2x ,− y ) .
♦ Matriz Associada a uma Transformação Linear
Sejam V um espaço vetorial n-dimensional, W um espaço vetorial m-dimensional e T : V → W uma
transformação linear.
Considerando as bases A = {v1 , v 2 ,..., v n } de V e B = {w1 , w2 ,..., w m } de W e um vetor qualquer v∈V ,
tem-se:
v = k 1 ⋅ v 1 + k 2 ⋅ v 2 + ... + k n ⋅ v n
com k i ∈R, para todo i = 1,..., n .
Aplicando a transformação linear T,
T (v ) = T (k 1 ⋅ v 1 + k 2 ⋅ v 2 + ... + k n ⋅ v n )
T (v ) = k1 ⋅ T (v 1 ) + k 2 ⋅ T (v 2 ) + ... + k n ⋅ T (v n )
Além disso, T (v ) ∈W , portanto:
T (v ) = l1 ⋅ w1 + l 2 ⋅ w 2 + ... + lm ⋅ w m
com l j ∈R, para todo j = 1,..., m .
(1)
(2)
68
Como T (v i ) ∈ W , para todo i = 1,..., n .
T ( v1 ) = a11 ⋅ w1 + a 21 ⋅ w2 + ... + a m1 ⋅ wm
T ( v 2 ) = a12 ⋅ w1 + a 22 ⋅ w 2 + ... + a m 2 ⋅ w m
...
T (v n ) = a1n ⋅ w1 + a 2 n ⋅ w2 + ... + a mn ⋅ w m
(3)
Substituindo (3) em (1), tem-se:
T (v ) = k1 ⋅ (a11 ⋅ w1 + ... + a m1 ⋅ w m ) + k 2 ⋅ (a 12 ⋅ w1 + .. + a m2 ⋅ w m ) + ... + k n ⋅ (a 1n ⋅ w1 + ... + a mn ⋅ w m )
T (v ) = ( k1 a11 + k 2 a 12 + ... + k n a1n ) ⋅ w1 + ... + ( k1 a m1 + k 2 a m 2 + ... + k n a mn ) ⋅ w m
(4)
Comparando (2) e (4), tem-se:
l1 = k 1a 11 + k 2 a12 + ... + k n a1n
l2 = k 1a 21 + k 2 a 22 + ... + k n a 2 n
................................................
lm = k1 a m1 + k 2 a m 2 + ... + k n a mn
Na forma matricial:
l1
l2
... =
lm
a11
a 21
...
a n1
a 12
a 22
...
a n2
... a1n k 1
... a 2 n k 2
.
... ... ...
... a mn k n
ou seja,
[T (v )] B = [T ] AB .[v] A
A matriz [T ] BA é a matriz associada a transformação T em relação as bases A e B.
Exemplo: Seja a transformação linear T : R 2 → R 3 tal que T ( x , y ) = ( x , y , x + y ) . Sendo A a base
canônica do R2 e B a base canônica do R3, tem-se:
T (1,0) = (1,0,1) = 1 ⋅ (1,0,0) + 0 ⋅ (0,1,0) + 1 ⋅ (0,0,1) e
T (0,1) = (0,1,1) = 0 ⋅ (1,0,0) + 1 ⋅ (0,1,0) + 1 ⋅ (0,0,1) .
1 0
Então, [T ] = 0 1 .
1 1
A
B
2
Por exemplo, [(2,3)] A = .
3
2 1 0
2
Obtém-se, [T (2,3)] B = [(2,3,5)]B = 3 = 0 1 ⋅ .
5 1 1 3
Sejam as bases não canônicas A = {(1,2 ), (3,5)} e B = {(1,2,0), (2,−3,1), (0,−1,1)}.
1
7
Assim, T (1,2) = (1,2,3) = 2 ⋅ (1,2,0) + (− ) ⋅ ( 2, −3,1) + ⋅ (0,−1,1) e
2
2
16
7
55
T (3,5) = (3,5,8) = ⋅ (1,2,0) + (− ) ⋅ (2, −3,1) + ⋅ (0,−1,1) .
3
6
6
69
16
2
3
1
A
Então, [T ] B = − 2 − 76 .
7
55
6
2
− 1
Por exemplo, [(2,3)] A = .
1
16
103
2
3
− 1
Obtém-se, [T (2,3)] B = [(2,3,5)]B = − 12 − 76 ⋅ = − 23
1 17
7
55
6
3
2
As matrizes associadas a alguns dos operadores lineares no espaço vetorial R2 em relação a base
canônica
0 x
x 1
Reflexão em torno do eixo X:
=
⋅
− y 0 − 1 y
kx k 0 x
Dilatação ou Contração de fator k na direção do vetor: =
⋅
ky 0 k y
x 1 0 x
Cisalhamento na direção do eixo Y:
=
⋅
kx + y k 1 y
x cosθ − y senθ cosθ − senθ x
Rotação:
=
⋅
x sen θ + y cosθ senθ cosθ y
♦ Operações com Transformações Lineares
1. Adição
Sejam T1 : V → W e T 2 :V → W transformações lineares. Define-se a adição de T1 com T2 como
sendo a transformação linear:
(T1 + T2 ) : V → W
v a (T1 + T2 )(v) = T1 ( v ) + T2 (v )
Matricialmente, [T1 + T2 ] BA = [T1 ] BA + [T2 ]AB , onde A é uma base de V e B uma base de W.
Exemplo: Sejam T1 : R 3 → R 3 tal
T2 ( x, y , z ) = (0,0, z ) .
A transformação soma é (T1 + T2 ) : R 3
1 0 0
0
Ainda, [T1 ] = 0 2 0 , [T2 ] = 0
0
0 0 1
que
T1 ( x, y, z ) = ( x,2 y , z )
e T2 : R 3 → R 3 tal
que
→ R 3 tal que (T1 + T2 )( x , y , z ) = ( x,2 y,2 z).
0 0
1 0 0
0 0 e [T1 + T2 ] = 0 2 0 em relação a base canônica
0 0 2
0 1
do R3.
70
2. Multiplicação por Escalar
Sejam T : V → W uma transformação linear e k ∈ R um escalar. Define-se a transformação linear
produto de T pelo escalar k como sendo:
(k ⋅ T ) : V → W
v a ( k ⋅ T )(v ) = k ⋅ T ( v)
Matricialmente, [k ⋅ T ]BA = k ⋅ [T ] BA , onde A é uma base de V e B é uma base de W.
1 2
Exemplo: Seja [T ] = 0 1 e k = 2 .
3 0
Então, T ( x , y ) = ( x + 2 y, y,3 x ) e (2 ⋅ T )( x , y ) = (2 x + 4 y,2 y,6 x ) .
2 4
Ainda, [2 ⋅ T ] = 0 2 = 2 ⋅ [T ]
6 0
3. Composição
Sejam T1 : V → U e T2 : U → W transformações lineares. Define-se a composta de T1 com T2
como sendo a transformação linear:
(T2 o T1 ) : V → W
v a (T2 o T1 )(v ) = T2 (T1 (v ))
Matricialmente, [T 2 o T1 ]CA = [T2 ]CB ⋅ [T1 ] BA , onde A é uma base de V , B é uma base de U e C é uma
base de W.
Exemplo: Sejam os operadores lineares no R2, T1 ( x, y ) = ( 2 x + y, − y ) e T2 ( x, y ) = ( 2 y ,− x + 3 y ) .
(T1 o T 2 )( x, y ) = T1 (T2 ( x , y )) = T1 ( 2 y ,− x + 3 y )= (2( 2 y ) + (− x + 3 y ),−( − x + 3 y )) = (− x + 7 y, x − 3 y )
(T 2 o T1 )( x, y ) = T2 (T1 ( x, y )) = T 2 ( 2 x + y ,− y )= (2( − y ),−(2 x + y ) + 3( − y )) = ( −2 y ,−2 x − 4 y )
1
2
0 2
Com relação a base canônica: [T1 ] =
e [T2 ] =
.
0 − 1
− 1 3
1 0 2 − 1
7
1 0 − 2
2
0 2 2
Assim, [T1 o T 2 ] =
⋅
=
e [T 2 o T1 ] =
⋅
=
.
0 − 1 − 1 3 1 − 3
− 1 3 0 − 1 − 2 − 4
Propriedades de Transformações Invertíveis
Sejam T : V → W , T1 : V → W e T 2 : W → U transformações lineares invertíveis e k ∈ R, k ≠ 0 .
1. (T −1 ) −1 = T
2. (k ⋅ T ) −1 = k −1 ⋅ T −1
−1
3. (T 2 o T1 ) −1 = T1 o T 2
−1
71
♦ Exercícios
1) Verificar se as transformações são lineares:
T : R3 → R2
a)
( x, y , z ) a T ( x, y, z ) = ( x 2 , y + z )
b)
T : R3 → R2
( x , y , z ) a T ( x, y , z ) = ( x,2 y )
c)
T : R2 → R2
( x , y ) a T ( x, y ) = ( x + a, y + b), a , b ∈ R − {0}
d)
T : R3 → R
( x, y , z ) a T ( x, y, z ) = x − 3 y + 1
e)
T : R2 → R
( x, y ) a T ( x, y ) = x
2) Para que valores de k ∈ R a transformação no R3 tal que T ( x , y , z ) = (2 x + 3k , y ,3 z) é linear?
3) Seja Matn×n (R) o espaço vetorial das matrizes quadradas n × n sobre R e M ∈ Matn ×n (R ) uma
matriz arbitrária qualquer.
A transformação T : Mat n×n ( R) → Matn ×n (R ) tal que T ( A) = A ⋅ M + M ⋅ A é linear?
4) Sejam v = (0,1), u = (1,0), t = (2,1) e w = (1,2) e T : R 2 → R 2 tal que T ( x , y ) = (2 x,2 y ) , que define
a dilatação de fator 2 na direção do vetor.
Represente v, u , t, w, T (v ), T ( u), T (t ) e T (w) em um sistema de eixos cartesianos.
1 2 x
5) Considere a transformação linear T : R 2 → Mat2×1 (R ) tal que T ( x , y ) =
⋅ .
0 3 y
Determine T (1,1), T ( −3,4) e T ( x, y ) .
6) Encontre a lei que define a transformação linear
cada vetor v = ( x, y ) à sua reflexão em torno do eixo Y.
Determine T ( −2, −3) .
Represente no sistema de eixos cartesianos.
7) Seja T : R 3 → R 2 uma transformação
T (1,1,1) = (1,1) . Indique a lei de T.
linear
tal
que
T : R2 → R2
que
faz
associar
T (1,0,0) = ( 2,4 ), T (0,1,0) = (3,5) e
8) Seja T : R 3 → R 2 uma transformação linear definida por T (1,1,1) = (1,2), T (1,1,0) = (2,3) e
T (1,0,0) = (3, 4) .
a) Determine T ( x , y, z) .
b) Determine ( x, y , z ) ∈ R 3 tal que T ( x , y, z) = (−3,−2 ) .
c) Determine ( x, y , z ) ∈ R 3 tal que T ( x , y , z ) = ( 0,0) .
72
9) Calcule o núcleo e o conjunto imagem das transformações abaixo:
T : R3 → R2
a)
( x , y , z ) a T ( x, y, z ) = ( x + 2 y + 3 z,3x + 2 y + z )
b)
T : R2 → R3
( x, y ) a T ( x, y ) = ( x + y,2 x − y ,− x + 3 y )
10) Ache uma transformação linear T : R 3 → R 2 cujo núcleo seja gerado pelo vetor (1,1,0) .
11) Determinar um operador linear no R3 cujo conjunto imagem seja gerado por {(2,1,1), (1, −1,2)} .
12) Indique a lei de T −1 para cada uma das transformações lineares:
T : R2 → R2
a)
( x , y ) a T ( x, y ) = ( y, − x)
b)
IV :V → V
v a I V (v ) = v
T : Mat2× 2 (R ) → R 4
c)
13)
x
z
y
x
a T (
t
z
y
) = ( t , z, y , x )
t
Seja o operador linear T no R3 tal que T ( x , y, z) = ( x + 2 y , y, x + z) . Mostre que T é um
isomorfismo e indique sua inversa.
14) Considere B = {v, u , w} uma base do R3, onde v = (1,2,3) , u = (2,5,3) e w = (1,0,1) .
a) Ache uma fórmula para a transformação linear T : R 3 → R 2 tal que T (v ) = (1,0) , T (u ) = (1,0) e
T ( w) = (0,1) .
b) Encontre uma base e a dimensão do N (T ) .
c) Encontre uma base e a dimensão da Im(T ) .
d) T é invertível? Justifique sua resposta.
15) Seja T : R 3 → R 2 tal que T ( x , y, z) = ( x + y , x + z ) . Indique:
a) [T ] BA considerando A e B bases canônicas.
b) [T ] CD onde C = {(1,0,0), (0,−1,0), (0,0,2)} e D = {(1,2), (3,5)} .
c) [T ( v) ]D onde v = (1,1,0 ) .
16) Sejam S e T operadores lineares no R2 definidas por S ( x , y ) = ( x + 2 y , y ) e T ( x , y ) = ( x ,3 y ) .
Determine:
a) S + T
b) (2 ⋅ S ) + (4 ⋅ T )
c) S o T
d) S o S
73
17) Escolha alguns vetores de R2, represente-os no plano cartesiano. Em seguida encontre a imagem de
cada um deles em relação ao operador S anterior. Represente essas imagens no plano cartesiano.
Observe o que acontece.
18) Repita os mesmos passos do exercício anterior, para o operador T.
2 0
19) Seja T a transformação linear determinada pela matriz 4 0 .
0 − 4
a) Indique a lei da transformação.
b) Calcule T (−2,1) .
20) Seja T o operador linear no R3 definido por T ( x , y, z) = (2 y + z, x − 4 y,3x ) .
a) Encontre a matriz de T na base B = {(1,1,0), (1,0,1), (1,0,0)} .
b) Encontre [T (1,0, −1)]B utilizando [T ] BB .
1 0 2
21)Seja T a transformação linear associada a matriz 3 0 − 1 .
2 0 0
a) Ache uma base para N (T ) .
b) Ache uma base para Im(T ) .
c) T é sobrejetora ? E injetora?
d) Determine a matriz associada a T em relação a base {(1,2,0), (0,−1,1), ( 0,1,2)} .
22) Seja T : R 2 → R 3 a transformação linear definida por T ( x, y ) = ( x + 2 y, − x ,0) .
a) Ache a matriz associada a T relativa as bases A = {(1,3), (−2,4)} e B = {(1,1,1), (2,2,0), ( 3,0,0 )} .
− 1
b) Use a matriz para calcular [T (v )] B onde [v ] A = .
2
− 1 2
23) Seja T a transformação linear associada a matriz 3 0 .
2 1
a) Qual a lei que define T?
b) Determine o núcleo de T e uma base para N (T ) .
c) Determine a imagem de T e uma base para Im(T ) .
24) Seja a transformação linear T : R 3 → R 2 tal que T ( x , y , z ) = (2 x − y + 3z,4 x + 2 y + 3z ) .
a) Considerando A e B as bases canônicas do R3 e do R2 , encontre [T ]B .
b) Considerando A = {(1,1,0), (0,1,1), (1,0,1)} uma base do R3 e B = {(1,1), (1, −1)} uma base do R2,
A
encontre [T ]B .
A
25) Seja a transformação linear T : R 2 → R 3 tal que T ( x , y ) = (2 x + y, y, x + y ) . Encontre:
a) A matriz de T em relação a base canônica
b) A matriz de T em relação as bases A = {(1,−2), ( 0,1)} e B = {(1,0,0), (0,2,1), (0,0,3)} .
74
2 − 1
26) Considere [T ] = 1 0 onde A = {(1,0), ( −1,1)} e B = {(1,2,3), (0, −1,1), (0,0,2)} . Encontre as
0 2
coordenadas de [T (v )] B sabendo que as coordenadas de v em relação à base canônica do R2 são
− 1
.
2
A
B
27) Sabendo que a transformação linear Tθ : R 2 → R 2 , cuja matriz em relação à base canônica é
cos ? − sen ?
x
, aplicada a um vetor [v ] = indica a rotação do vetor v de um ângulo θ .
sen ? cos ?
y
cosθ − sen θ
Assim, [Tθ ] =
⋅ [v ] .
sen θ cos θ
Utilizando a matriz de rotação, determine o vértice C = ( x, y ) de um triângulo retângulo e isósceles
em A, onde A = (2,1) e B = (5,3) .
− 2 0 0
28) Seja 0 1 0 a matriz associada a um operador T em relação à base {(1,0,1), (0,−1,1), (0,0,1)} .
0 0 2
Determine a lei de T.
♦ Respostas
1) b) Sim
2) k = 0
3) Sim
3
5) T (1,1) =
3
5
T ( −3,4 ) =
12
x + 2y
T ( x , y ) =
3y
(S + T )( x, y ) = (2 x + 2 y ,4 y )
(2 ⋅ S + 4 ⋅ T )( x , y ) = (6 x + 4 y ,14 y )
(S o T )( x, y ) = ( x + 6 y ,3 y )
(S o S )( x, y ) = ( x + 4 y , y )
T ( x , y ) = (2 x,4 x ,−4 y )
T (−2,1) = (−4,−8, −4)
1
1
− 3
20) a) [T ] B = 3
3
3
2 − 3 − 4
16) a)
b)
c)
d)
19) a)
b)
1
b) [T (1,0, −1)] B = 3
− 5
21) a) base N (T ) : {(0,1,0)}
b) base Im( T ) : {(1,3,2 ), (2,−1,0)}
c) Nem injetora nem sobrejetora.
2
4
1
10
20
d) [T ] A = 0
3
3
1 − 5 − 10
3
3
75
6) T ( x , y ) = ( − x , y ) e T (−2, −3) = (2,−3)
7) T ( x , y, z) = (2 x + 3 y − 4 z ,4 x + 5 y − 8 z )
8) a) T ( x , y, z) = (3x − y − z,4 x − y − z)
b) {(1,6 − z, z), z ∈ R}
c) {(0, y ,− y ), y ∈ R}
9) a) N (T ) = {( z, −2 z, z), z ∈ R}
Im(T ) = R 2
b) N (T ) = {(0,0)}
Im( T ) = {( x , y, z) ∈ R 3 | −5 x + 4 y + 3 z = 0}
12) a) T −1 ( x, y ) = ( − y , x )
b) I V−1 = I V
t z
c) T −1 ( x , y , z , t ) =
y x
− 3x + y + 3 z 9 x − 3 y − z
14) a) T ( x , y, z) = ( 8 , 8 )
b) N (T ) = {( 3y , y ,0), y ∈ R}
base N (T ) : {(1,3,0)}
dim N (T ) = 1
c) Im(T ) = R 2
base Im(T ) : {(1,0), (0,1)}
dim Im( T ) = 2
d) Não, pois T não é injetora.
1 1 0
15) a) [T ] BA =
1 0 1
5
6
− 2
b) [T ]CD =
1 − 2 − 2
− 7
c) [T (v )] D =
3
0 0
0
1
22) a) [T ] = − 2 1 b) [T (v )] B = 52
8 4
0
3 3
23) a) T ( x , y ) = ( − x + 2 y ,3x ,2 x + y )
b) N (T ) = {(0,0)}
A
B
c) Im( T ) = {( x, y, z) ∈ R 3 | 3x + 5 y − 6 z = 0}
base Im( T ) : {(−1,3,2 ), (2,0,1)}
2 − 1 3
24) a) [T ] BA =
2 3
4
b) [T ] BA =
−
7
2
5
2
−
7
2
3
2
6
− 1
0 1
2 1
A
25) a) [T ] = 0 1 b) [T ] B = − 1 12
0 1
1 1
6
A
B
0
26) [T (v )] B = 1
4
27) C = (0,4) ou C = ( 4,−2)
28) T ( x, y, z ) = ( −2 x, y,−4 x + y + 2 z )
76
♦ Apêndice C – Teoremas
Teo33. Se T : V → W é uma transformação linear então T (0V ) = 0W .
Teo34. Seja T : V → W uma transformação linear.
Então T (k 1 ⋅ v1 + k 2 ⋅ v 2 + ... + k n ⋅ v n ) = k 1 ⋅ T (v1 ) + k 2 ⋅ T ( v 2 ) + ... + k n ⋅ T (v n ) , para quaisquer
v1 , v 2 ,..., v n ∈V e para quaisquer k1 , k 2 ,..., k n ∈ R .
dem.: (indução em n).
Base: Para k = 2 .
T (k 1 ⋅ v1 + k 2 ⋅ v 2 ) = T (k 1 ⋅ v 1 ) + T (k 2 ⋅ v 2 ) = k1 ⋅ T (v 1 ) + k 2 ⋅ T (v 2 ) por TL1 e TL2.
Passo: (Hipótese de Indução) Supor que vale a igualdade para k ∈ N, k > 2 , isto é,
T (k 1 ⋅ v1 + k 2 ⋅ v 2 + ... + k n ⋅ v n ) = k1 ⋅ T (v1 ) + k 2 ⋅ T (v 2 ) + ... + k n ⋅ T ( v n ) .
Vale a igualdade para k + 1 vetores ?
T ((k1 ⋅ v1 + k 2 ⋅ v 2 + ... + k n ⋅ v n ) + k n +1 ⋅ v n +1 ) =
por TL1.
T (k 1 ⋅ v 1 + k 2 ⋅ v 2 + ... + k n ⋅ v n ) + T ( k n +1 ⋅ v n +1 ) =
por TL2.
T (k 1 ⋅ v 1 + k 2 ⋅ v 2 + ... + k n ⋅ v n ) + k n +1 ⋅ T (v n +1 ) =
por hipótese de indução.
k1 ⋅ T ( v1 ) + k 2 ⋅ T (v 2 ) + ... + k n ⋅ T (v n ) + k n +1 ⋅ T ( v n +1 ) .
Assim, T (k 1 ⋅ v1 + ... + k n ⋅ v n + k n +1 ⋅ v n +1 ) = k1 ⋅ T ( v1 ) + ... + k n ⋅ T (v n ) + k n +1 ⋅ T ( v n +1 )
Logo, vale a igualdade para todo n ∈ N, n ≥ 2 .
Corolário34: Sabendo-se as imagens dos vetores de uma base do espaço vetorial V é possível
determinar a transformação linear T : V → W .
Teo35. Seja T : V → W é uma transformação linear.
Então i) T (− v ) = −T (v ) , para todo v∈V .
ii) T (v − u ) = T (v ) − T (u ) , para quaisquer v, u ∈ V .
Teo36. Seja T : V → W uma transformação linear e S um subespaço vetorial do espaço vetorial V então
T ( S ) = {w ∈W | existe s ∈ S tal que T ( s ) = w} é um subespaço vetorial do espaço W.
dem.: (Sub1) Por hipótese, S ≤ V .
Por Sub1, 0V ∈ S .
Pelo Teo33, T (0V ) = 0W .
Logo, 0W ∈ T (S ) .
(Sub2) Sejam w1 , w 2 ∈ T ( S ) .
Então, existem v1 , v 2 ∈ S tais que T (v1 ) = w1 e T (v 2 ) = w 2 .
Assim, w1 + w 2 = T ( v1 ) + T (v 2 ) = T (v1 + v 2 ) por TL1.
Como, S ≤ V .
Pelo fechamento para operação de adição em S, v1 + v 2 ∈ S .
Então, w1 + w 2 ∈ T ( S ) .
Logo, vale o fechamento para operação de adição em T (S ) .
(Sub3) Sejam w ∈T ( S ) e k ∈ R .
Então, existe v ∈ S tal que T (v ) = w .
Assim, k ⋅ w = k ⋅ T (v ) = T (k ⋅ v)
por TL2.
Como, S ≤ V .
Pelo fechamento para operação de multiplicação por escalar em S, k ⋅ v ∈ S .
Então, k ⋅ w ∈ T (S ) .
77
Logo, vale o fechamento para operação de multiplicação por escalar em T (S ) .
Teo37. N (T ) é um subespaço vetorial de V.
Teo38. Im(T ) é um subespaço vetorial de W.
Teo39. (Teorema do Núcleo e da Imagem)
Seja T : V → W uma transformação linear . Então dimV = dim N (T ) + dim Im( T ) .
dem.: Considere dim N (T ) = t e {v1 , v 2 ,..., v t } ⊆ N (T ) uma base para N (T ) .
Seja dim Im( T ) = s e {w1 , w 2 ,..., w s } ⊆ Im( T ) uma base para Im(T ) .
Existem u1 , u 2 ,..., u s ∈ V tais que T (u1 ) = w1 , T (u 2 ) = w 2 ,..., T (u s ) = w s .
(1)
Considere o conjunto {v1 ,..., v t , u1 ,..., u s } ⊆ V .
Se v∈V então T (v ) ∈ Im( T ) .
Como [w1 ,..., w s ] = Im( T ) , existem l1 ,..., l s ∈ R tais que T (v ) = l1 ⋅ w1 + ... + l s ⋅ w s . (2)
Considere o vetor u = l1 ⋅ u1 + ... + l s ⋅ u s − v .
(3)
Assim, T (u ) = T (l1 ⋅ u1 + ... + l s ⋅ u s − v) .
Pelo Teo34, T (u ) = l1 ⋅ T (u1 ) + ... + ls ⋅ T (us ) − T ( v) .
De (1), T (u ) = l1 ⋅ w1 + ... + l s ⋅ w s − T (v ) .
De (2), T (u ) = T ( v) − T (v ) .
Assim, T (u ) = 0 W .
Então, u∈ N (T ) .
Mas, [v1 ,..., v t ] = N (T ) .
Então, existem k1 ,..., k t ∈ R tais que u = k1 ⋅ v1 + ... + k t ⋅ v t .
(4)
De (3) e (4), l1 ⋅ u1 + ... + l s ⋅ u s − v = k1 ⋅ v1 + ... + k t ⋅ v t .
Assim, v = l1 ⋅ u1 + ... + l s ⋅ u s − k 1 ⋅ v1 − ... − k t ⋅ v t .
Então, [v1 ,..., v t , u1 ,..., u s ] = V .
(5)
Seja k1 ⋅ v1 + ... + k t ⋅ v t + k t +1 ⋅ u1 + ... + k t + s ⋅ u s = 0 V , com k1 ,..., k t +s ∈ R .
(6)
Assim, T (k 1 ⋅ v 1 + ... + k t ⋅ v t + k t +1 ⋅ u1 + ... + k t +s ⋅ u s ) = T (0V ) .
Pelo Teo33, T (k 1 ⋅ v1 + ... + k t ⋅ v t + k t +1 ⋅ u1 + ... + k t +s ⋅ u s ) = 0W .
Pelo Teo34, k1 ⋅ T (v 1 ) + ... + k t ⋅ T ( v t ) + k t +1 ⋅ T (u1 ) + ... + k t +s ⋅ T (u s ) = 0W
Mas, {v1 ,..., v t } ⊆ N (T ) .
Então, T (v1 ) = 0 W ,..., T ( v t ) = 0 W .
(7)
De (1) e (7), k1 ⋅ 0 W + ... + k t ⋅ 0 W + k t +1 ⋅ w1 + ... + k t +s ⋅ w s = 0 W .
Assim, k t +1 ⋅ w1 + ... + k t +s ⋅ w s = 0 W .
Como, {w1 ,..., w s } é uma base para Im(T ) .
Então, {w1 ,..., w s } é linearmente independente.
Tem-se, k t +1 = ... = k t + s = 0 .
Substituindo em (6), k1 ⋅ v1 + ... + k t ⋅ v t = 0V .
Como, {v1 ,..., v t } é uma base para N (T ) .
Então, {v1 ,..., v t } é linearmente independente.
Tem-se, k1 = ... = k t = 0 .
Então, {v1 ,..., v t , u1 ,..., u s } é linearmente independente.
(8)
78
De (5) e (8), {v1 ,..., v t , u1 ,..., u s } é uma base de V.
Logo, dimV = t + s = dim N (T ) + dim Im( T ) .
Teo40. Seja T : V → W é uma transformação linear. T é uma transformação linear injetora se e somente
se N (T ) = {0 V } .
dem.:
(→) Se T é uma transformação linear injetora então N (T ) = {0 V } ?
Considere v ∈ N (T ) qualquer.
Então, T (v ) = 0 W .
Pelo Teo33, T (0V ) = 0W .
Assim, T (v ) = T (0V ) .
Como T é uma transformação linear injetora.
Se T (v ) = T (0V ) então v = 0V .
Logo, N (T ) = {0 V } .
(←) Se N (T ) = {0 V } então T é uma transformação linear injetora ?
Sejam v, u ∈V tais que T (v ) = T (u ) .
Assim, T (v ) − T (u) = 0W .
Pelo Teo35, T (v − u ) = 0W .
Mas, N (T ) = {0 V } .
Assim, v − u = 0 V .
Então, v = u .
Logo, T é uma transformação linear injetora.
Teo41.Seja T : V → W é uma transformação linear injetora e {v1 , v 2 ,..., v n } ⊆ V um conjunto de vetores
linearmente independente. O conjunto {T ( v1 ), T ( v 2 ),..., T ( v n )} ⊆ W também é linearmente
independente.
Teo42.Seja T : V → W é uma transformação linear injetora e dimV = dim W . Então a transformação
linear T é sobrejetora.
Teo43.Seja T : V → W uma transformação. A transformação T é bijetora se e somente se for invertível.
Teo44. Seja T : V → W uma transformação linear e {v1 , v 2 ,..., v n } ⊆ V . Se [v1 , v 2 ,..., v n ] = V então
[T (v1 ), T (v 2 ),..., T (v n )] = Im( T ) .
Teo45. Sejam T : V → W e R : W → U transformações lineares.
Então a transformação composta ( R o T ) : V → U tal que ( R o T )(v ) = R (T (v )) é linear.
Teo46. Sejam T : V → W e R : W → U transformações lineares bijetoras.
Então i) a transformação inversa T −1 : W → V é linear.
ii) ( R o T ) −1 = T −1 o R −1
Teo47. Seja Q : V → W , R : V → W , S : W → U e T : W → U transformações lineares e k ∈ R .
Então i) (S + T ) o Q = (S o Q) + (T o Q)
ii) T o (Q + R ) = (T o Q ) + (T o R )
iii) (k ⋅ T ) o Q = k ⋅ (T o Q ) = T o (k ⋅ Q)
79
Teo48.Sejam V e W espaços vetoriais e {v1 , v 2 ,..., v n } uma base V. Se o vetor v i pode ser associado a
um vetor w i ∈W , para todo i = 1,..., n então existe uma única transformação linear T : V → W
tal que T (v i ) = wi , para todo i = 1,..., n .
Teo49. Seja L(V , W ) (ou Hom(V , W ) ) o conjunto de todas as transformações lineares de V em W e as
seguintes operações:
+ : L(V , W ) × L (V , W ) → L(V , W )
(T1 , T2 )
a T1 + T2 tal que (T1 + T2 )(v ) = T1 (v ) + T 2 (v )
⋅ : R × L (V , W ) → L(V ,W )
(k , T )
a k ⋅ T tal que ( k ⋅ T )(v ) = k ⋅ T (v )
Então [ L(V , W ), R ,+,⋅] é um espaço vetorial.
Teo50. Se dimV = n e dimW = m então dim L (V , W ) = nm .
O conjunto L(V , R ) ou Hom(V , R) ou V * de todos os funcionais de V em R é denominado espaço
vetorial dual de V.
Teo51. Seja V um R-espaço vetorial munido de um produto interno e um dado vetor u ∈ V . A
função f u : V → R tal que f (v) =< u, v > é um funcional.
Teo52. Seja V um R-espaço vetorial munido de um produto interno. A função T : V → V * tal que
T (v ) = f v é uma transformação linear.
Teo53. Sejam V um R-espaço vetorial munido de um produto interno e f : V → R um funcional. Então
existe um único vetor v ∈ V tal que f (u ) =< v, u > , para todo u ∈ V , isto é, a função
T : V → V * tal que T (v ) = f v é um isomorfismo.
Corolário53. Se dimV = n então dimV * = n .
80
Baixar