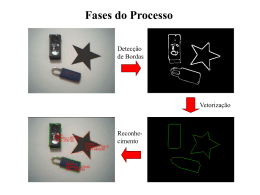
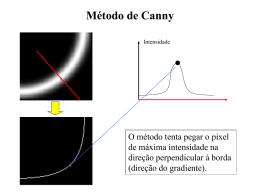
Seminário Introdução à Visão Computacional - The Cyclops Project CPGCC - INE -UFSC Domínio do Espaço - Parte I 2. Domínio do Espaço Parte I - Operações utilizando Convolução E3. Detecção de Bordas com Convolução Simples • E3.1 Roberts • E3.2 Sobel • E3.3 Robinson E3’ Operadores Avançados de Detecção de Bordas • E 3.4 Canny E3’’ Detecção de Estruturas Salientes • E 3.5 Sha’aShua E3. Operações de Detecção de Bordas O que é borda ? É o contorno entre um objeto e o fundo indicando o limite entre objetos sobrepostos Variações de intensidade complexas que ocorrem em uma região são geralmente chamadas de textura. Bordas são definidas como picos da magnitude do gradiente, ou seja, são variações abruptas da textura que ocorrem ao longo de curvas dadas pelos valores do gradiente da imagem. As bordas são regiões da imagem onde ocorre uma mudança de intensidade em um certo intervalo do espaço, em uma certa direção. Isto corresponde a regiões de alta derivada espacial. E3. Operações de Detecção de Bordas E3. Operações de Detecção de Bordas O borda unidimensional E3. Operações de Detecção de Bordas O borda bidimensional E3. Operações de Detecção de Bordas Como realizamos a detecção ? Como uma borda é definida por uma mudança no nível de cinza, quando ocorre uma denscontinuidade na intensidade, ou quando o grandiente da imagem tem uma variação abrupta, um operador que é sensível a estas mudanças operará como um detector de bordas. Um operador de derivada faz exatamente esta função. Uma interpretação de uma derivada seria a taxa de mudança de uma função, e a taxa de mudança dos níveis de cinza em uma imagem é maior perto das bordas e menor em áreas constantes. E3. Operações de Detecção de Bordas Como realizamos a detecção ? Se pegarmos os valores da intensidade da imagem e acharmos os pontos onde a derivada é um ponto de máximo, nós teremos marcado suas bordas. Dado que as imagens são em duas dimensões, é importante considerar mudanças nos níveis de cinza em muitas direções. Por esta razão, derivadas parciais das imagens são usadas, com as respectivas direções X e Y. Uma estimativa da direção atual da borda pode ser obtida usando as derivadas x e y como os componentes da direção ao longo dos eixos, e computar o vetor soma. O operador envolvido é o gradiente, e se a imagem é vista como uma função de duas variáveis A(x,y) então o gradiente é definido como: E3. Operações de Detecção de Bordas Como implementamos a detecção ? Um detector de bordas gera: • uma imagem de gradientes expresso em tons de cinza (sempre!) • uma imagem de bordas (onde os pixel com gradientes irrelevantes foram eliminados) • uma matriz de vetores de orientação do gradiente (onde na posição de cada pixel está um valor indicando a direção principal do gradiente naquele ponto) E3.1. Operador de Roberts É o mais antigo e simples algoritmos de detecção de bordas. Utiliza um par de matrizes 2x2 para encontrar os gradientes nas direções x e y: E3.1. Operador de Roberts Para determinar onde o pixel avaliado é ou não um pixel de borda, o gradiente é calculado da seguinte forma: Se a magnitude calculada é maior do que um valor limite (parâmetro), o pixel é considerado ser parte de um borda. E3.1. Operador de Roberts A direção do gradiente da borda, perpendicular à direção da borda, é encontrada com a seguinte fórmula: E3.1. Operador de Roberts Problemas: • O pequeno tamanho da máscara para o operador de Roberts torna o mesmo fácil de se implementar e rápido para calcular a máscara de resposta. As respostas, porém, são muito sensíveis ao ruído na imagem. • Como a máscara é de tamanho par, a imagem resultante terá uma linha e uma coluna a menos que a imagem original • de fato, o operador calcula o gradiente na posição de um pixel virtual entre as suas linhas e colunas... • encher resultante com uma linha e uma coluna pretas... E3.2. Operador de Sobel Utiliza duas máscaras para encontrar os gradientes vertical e horizontal das bordas. E3.2. Operador de Sobel • A fórmula para encontrar o gradiente e o ângulo são muito similares ao operador de Roberts. • A computação de |G| se torna mais complexa. Na prática |G| é aproximada da seguinte forma: |G|= |Gx| + |Gy|. • O módulo do gradiente é proporcional a derivada local da intensidade. • O ângulo do gradiente corresponde direção de máxima variação da intensidade • Devido as máscaras serem 3X3 ao invés de 2X2, Sobel é muito menos sensível ao ruído do que Roberts e os resultados são mais precisos. E3.3. Operador de Robinson É similar em operação ao de Sobel, porém usa um conjunto de oito máscaras, onde quatro delas são as seguintes: As outras quatro são simplesmente negações destas quatro. E3.3. Operador de Robinson • A magnitude do gradiente é o valor máximo obtido ao aplicar-se cada uma das as oito máscaras ao pixel. • O ângulo do gradiente pode ser aproximado como o ângulo na linha de zeros na máscara fornecendo a resposta máxima. • Este algoritmo aumenta a precisão de |G|, mas requer mais computação do que Roberts e Sobel,devido ao número de máscaras que deve ser aplicado. • Por outro lado, a determinação do ângulo é simplificada porque escolhe-se um dentre 8 valores possíveis ao invés de calculá-lo. E3.4. Operador de Canny Proposto por J. Canny em: A computational approach to edge detection, IEEE Transactions on pattern analysis and machine intelligence, 8(6), pp 679 – 698 (1986) Definiu um conjunto de requisitos que um detector de bordas deveria atender: 1.Taxa de erro: o detector de bordas deve detectar e achar somente bordas, nenhuma borda deve faltar; 2.Localização: a distância entre os pixels de borda encontradas pelo detector de bordas e a borda real deve ser a menor possível; 3.Resposta: o detector de bordas não deve identificar múltiplos pixels de borda onde somente existir um único pixel. E3.4. Operador de Canny E3.4. Operador de Canny O detector de bordas de Canny é um filtro de convolução f que uniformiza o ruído e localiza as bordas. O problema é identificar um filtro que otimize os três critérios do detector de bordas: • Se considerarmos uma borda de uma dimensão variando no contraste e então convolucionando a borda com a função de uniformização de Gauss, o resultado será uma variação contínua do valor inicial ao final, com uma inclinação máxima no ponto onde existe um "degrau". • Se esta continuidade é diferenciada em relação a x, esta inclinação máxima será o máximo da nova função em relação a original. E3.4. Operador de Canny E3.4. Operador de Canny Os máximos da convolução da máscara e da imagem indicarão bordas na imagem. Este processo pode ser realizado através do uso de uma função de Gauss de 2-Dimensões na direção de x e y. Os valores e o tamanho das máscaras de Gauss dependem da escolha do sigma (variância) na eq: E3.4. Operador de Canny • A aproximação do filtro de Canny para detecção de bordas é G'. • Convolucionando a imagem com G' obtemos uma imagem I que mostrará as bordas, mesmo na presença de ruído. • A convolução é relativamente simples de ser implementada, mas é cara computacionalmente, especialmente se for em 2D. • Uma convolução de Gauss de 2D pode ser separada em duas convoluções de Gauss de 1D. • O custo computacional do detector de bordas de Canny é relativamente alto e os resultados são geralmente pósprocessados para maior clareza. • Entretanto, o algoritmo é mais eficiente no processamento de imagens com ruídos ou com bordas difusas. E3.4. Algoritmo do Operador de Canny 1.Ler a imagem I a ser processada; 2.Criar uma máscara de Gauss de 1D G para convolucionar I. A variância s de Gauss é um parâmetro fornecido ao detector de bordas; 3.Criar uma máscara de 1-D para a primeira derivada de Gauss nas direções x e y; nomear como Gx e Gy. O mesmo valor s é usado; 4.Convolucionar a imagem I com G percorrendo as linhas na direção x (Ix) e percorrer as colunas na direção y (Iy); 5.Convolucionar Ix, com Gx, para dar I´x, o componente x e de I convolucionado com a derivada de Gauss, e convolucionar Iy, com Gy para dar I´y; 6.O resultado num ponto é a combinação dos componentes I´x e I´y. A magnitude do resultado é computada para cada pixel (x,y). E 3.5 Estruturas Salientes Sha´aShua • Introdução • Estruturas Salientes • A Rede de Saliência • O Cálculo da Saliência • Exemplos • Alguns Problemas • Conclusão E 3.5 Estruturas Salientes Sha´aShua • Percepção humana detecta estruturas e formatos salientes naturalmente • Shashua e Ullman propõem um método para se obter esta percepção • Rede de Saliência • Avalia a saliência de curvas • Baseia-se no comprimento e variação de curvatura • Corrige espaços em branco e tremidos nas linhas • Gera um Mapa de Saliência • Representa os locais salientes da imagem E 3.5 Estruturas Salientes Sha´aShua • Saliência Local • Elemento se destaca através de suas propriedades locais • • • • Orientação Cor Contraste Saliência Global • Um conjunto de elementos locais torna uma estrutura globalmente saliente quando se pode relacioná-los de alguma forma E 3.5 Estruturas Salientes Sha´aShua E 3.5 Estruturas Salientes Sha´aShua E 3.5 Estruturas Salientes Sha´aShua E 3.5 Estruturas Salientes - Sha´aShua Requisitos da Rede de Saliência • O tempo de detecção de estruturas salientes não pode depender da complexidade das curvas de fundo • As curvas salientes podem conter falhas e inconsistências • O número de computações deve ser pequeno E 3.5 Estruturas Salientes - Sha´aShua Requisitos da Rede de Saliência • Locais destacados no mapa de saliência não precisam ser curvas explícitas na imagem inicial • A medida de saliência não deve ser modificada após alterações de tamanho, posição e orientação E 3.5 Estruturas Salientes - Sha´aShua A Rede de Saliência • Processo computacional • • • Possui tamanho proporcional ao tamanho da imagem Realiza iterações locais entre os pontos • • • • • • Trata os pixels de uma imagem como pontos conectados de uma rede Reduz ruídos Completa espaços em branco Agrupa segmentos de curvas Suaviza curvas Mede a saliência das curvas Gera um mapa de saliência • Exibe a curva mais saliente E 3.5 Estruturas Salientes - Sha´aShua O Cálculo da Saliência • • Shashua e Ullman definiram uma função para calcular a saliência dos fragmentos de uma curva - Gera Rede de Saliência • Cresce de acordo com o comprimento da curva • Decresce com a variação da curvatura e com a quantidade de fragmentos A medida final é a soma das contribuições das medidas de saliência dos segmentos E 3.5 Estruturas Salientes - Sha´aShua O Cálculo da Saliência E 3.5 Estruturas Salientes - Sha´aShua O Cálculo da Saliência • Para cada pixel existe um conjunto fixo de elementos de orientação que conecta o pixel aos seus vizinhos. • Virtual • • Corresponde a uma área vazia na imagem Real • Corresponde a uma área preenchida E 3.5 Estruturas Salientes - Sha´aShua O Cálculo da Saliência E 3.5 Estruturas Salientes - Sha´aShua O Cálculo da Saliência E 3.5 Estruturas Salientes - Sha´aShua O Cálculo da Saliência E 3.5 Estruturas Salientes - Sha´aShua O Cálculo da Saliência E 3.5 Estruturas Salientes - Sha´aShua O Cálculo da Saliência Convolução de Gauss Threshold Mapa de Saliência Curva mais Saliente
Baixar