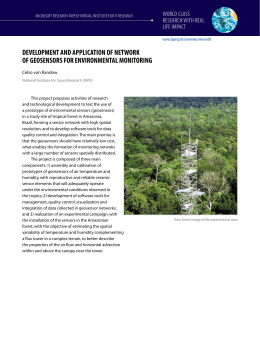
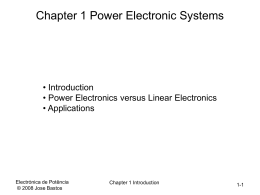
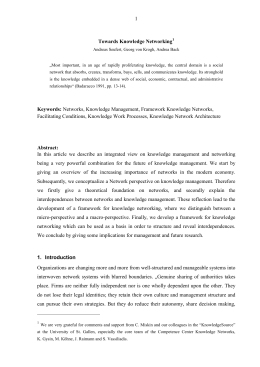
SMALL SIGNAL MODELS AND DYNAMIC PERFORMANCE OF QUASI-SQUARE-WAVE ZVS CONVERTERS WITH VOLTAGE-MODE AND CURRENT-MODE CONTROL J. M. F. Dores Costa, Member, IEEE M. Medeiros Silva, Senior Member, IEEE INESC, R. Alves Redol, 9, 1000 Lisboa, Portugal ABSTRACT Small-signal models of quasi-square-wave (QSW) converters are obtained by using state-space averaging. These models are used to perform a comparative study which shows that current-mode control of QSW converters does not provide the improved dynamic performance with respect to voltage-mode control that can be found in the case of PWM and quasi-resonant converters.1 I. INTRODUCTION Quasi-square-wave (QSW) converters are obtained from conventional PWM (Pulse Width Modulated) converters by adding a capacitor in parallel with one of switches [1]. This capacitor together with the existing inductor produces resonant transients that make it possible to have Zero Voltage Switching (ZVS). As a consequence, the switching losses are reduced: the switching frequency can be increased and, hence, a higher power density can be obtained. The voltage stress in the switch is kept at the same level as in the original PWM converter and this is an advantage over quasi-resonant (QR) converters. It is well known that the use of current-mode control in PWM [2,3] and QR converters [4,5] has significant advantages with respect to the more basic voltage-mode control: the output current is limited, and the dynamic performance is improved. It is the propose of this paper to investigate whether current-mode control of QSW converters is possible and, if so, whether it has similar advantages. In order to study the dynamic performance of QSW-ZVS converters with either voltage-mode or current-mode control, we develop their small-signal models, and we use them to perform a comparitive study of QSW-ZVS converters with both control modes. II. SMALL-SIGNAL MODEL OF PWM CONVERTERS IN DISCONTINUOUS INDUCTOR CURRENT MODE The operation of QSW converters has some resemblance to that of PWM converters in discontinuous conduction mode (DCM). In this section we will use state-space averaging to obtain the small-signal model of PWM converters in DCM. In the following sections, this model will be extended to QSW-ZVS converters. The state-variables of an ideal PWM converter are the current iL through the inductor L, and the voltage vC, which appears across the filtering capacitor C. These variables are the components of the state-vector x=[i , v ]t. Averaging over one L switching period Ts=1/fs will be denoted by placing a bar over the variable symbol: x = iL _ represented by vI, and, when averaged, by v I. C t vC . The input voltage is The state-equations after averaging are x& = Ax + BvI (1a) vO = Cx (1b) 1 where vO is the averaged output voltage, which is equal to vC for an ideal converter, and A, B and C are the averaged matrices, A = dA1 + d2A2 + d3A3 (2a) B = dB1 + d2B2 + d3B3 (2b) C = dC1 + d2C2 + d3C3 (2c) A1, B1, C1, A2, B2, C2 and A3, B3, C3 correspond to the three different circuit topologies that occur during one switching period and which last for dT, d2T and d3T, as shown in Fig. 1; d is the duty-ratio, d = 1 − d2 − d3 . In Fig.1, vON and vOFF are the voltages which appear across the inductor L when the active switch is on and off, respectivelly. These voltages are, for the buck, boost and buck-boost converters: TABLE I Buck Boost Buck-Boost vON vI − vO vI vI vOFF vO vO − vI vO We consider that the state-variables have a perturbation x$ superimposed to the DC value X, _ x = X + x$ (3) ^ ^ and, similarly, vI = VI + vI , d = D + d. ^ ^ To obtain the small-signal model we assume that the perturbations are small, i.e., v<<V I, d<<D, etc. We also assume that the perturbations do not vary significantly during one switching period, which means that the dynamic models that will be obtained are valid for frequencies much smaller than the switching frequency. If we substitute (3) in (1) and (2) and neglect second order terms, we obtain x&$ = Ax$ + Bv$I + Ed$ − E2 d$3 (4a) E = ( A1 − A2 ) X + ( B1 − B2 ) VI (4b) E2 = ( A2 - A3 ) X + ( B2 - B3 ) VI (4c) X = − A −1BVI (4d) iL iM V ON -VOFF L L 0 dT t1 d2 T t2 d3 T t3 t Fig. 1: Inductor current in DCM. 1This work was supported by JNICT under contract STDR/TIT/0082 2 Equation (4a) is the state-space averaged model of PWM converters in DCM; it can be used also with continuous conduction (d3=0). For any switching period of every PWM converter with DCM, the inductor current ripple iM and the averaged inductor current iL are, respectively, v iM = ON d L fs iL = iM (1 − d3 ) 2 (5) By perturbing these equations, the incremental factor d$3 can be obtained as, d$3 = K Li$L + K Dd$ + K I v$I + KOv$O + Ks f$s KL = −2 LFs VON D Ks = − D + D2 Fs KD = (6a) D + D2 D KO = − KI = D + D2 VON D D + D2 α VON D (6b) with α=1 for the buck converter, and α=0 for the boost and buck-boost converters. By replacing (6) in (4a) we obtain a small-signal model apllicable to the three types of the PWM converters in DCM, which has two possible control variables, d$ and f$s . With constant switching frequency, which is the usual case, f$s =0, and the the control variable is the duty-ratio d$ . With current-mode control both d$ and d$3 in equation (4a) must be expressed as a function of i$M ; this can be done by perturbing equations (5) and introducing these results in (4a). In this way, with f$s = 0, we obtain a small-signal model for PWM converters with DCM when current-mode control is used. III. EXTENSION TO QSW-ZVS CONVERTERS We will now extend the model expressed by equations (4) to QSW-ZVS converters. These converters are derived from PWM converters by introducing a new capacitor in parallel with the switch [1], as shown in Fig. 2, for the buck converster. We will assume that C1<<C. Any QSW converter presents four stages during a switching cycle. When S is on and D is off iL increases in an approximately linear fashion, since v1 and vO do not vary significantly during one switching period. At t=0, when S is switched off the value of the inductor current iL is iM , as shown in Fig. 3. After this, C1 charges through L, and when vC1 = vON + vOFF , at t=t1, the diode voltage is vD= 0 and the diode starts to conduct. There is a resonant transient involving C1 and L, but since the duration of this stage is very short , the charge of C1 can be considered as approximately linear with iL = iM . The duration T1=t1-t0 is T1 = ( vON + vOFF ) C1 iM (7) 3 vC 1 C 1 i L L S VI D v D C R V O Fig. 2: Buck QSW converter with ZVS. While diode D is conducting, i.e., from t1 to t2, the voltage across L is -vOFF and iL decreases linearly until t2 when iL = 0 . The duration of this stage is T2=t2-t1: T2 = iM L vOFF (8) After t2, there is a resonant transient involving C1 and L, and C1 will discharge until t3 , when vC1 = 0 , and S is switched on (this is the ZVS condition). During this third stage the inductor current and the switch voltage are: iL = − vOFF sin( ω 0t ) Z0 (9a) vC = vON + vOFF cos( ω 0t ) (9b) 1 where ω 0 = 1 LC1 and Z0 = L C1 . The duration of this stage is T3=t3-t2, −v 1 cos −1 ON T3 = ω0 v OFF (10) The value of the inductor current at t3 is, iL ( t3 ) = − i3 = − 1 Z0 2 2 vOFF − vON (11) After t3, the switch S is closed and the diode D is off, the voltage across L is vON and iL increases linearly until the end of the switching period when S is opened again. From equation (9b) we conclude that, for ZVS, VO must be limited as follows: Buck converter: VI 2 ≤ VO ≤ VI (12a) Boost converter: VO ≥ 2 VI (12b) Buck-Boost converter: VO ≥ VI (12c) The iL and the vC1 waveforms in Fig. 3 apply to the three types of QSW-ZVS converters. From Fig. 3, it is apparent that the operation of QSW-ZVS converters is similar to that of PWM converters in DCM, except during the resonant transitions. The 4 voltage across the switch has a square-like form, and the voltage stress is the same as in the corresponding PWM converter. The average value of the inductor current is (see Fig.3): iL = iM i 1 t1 1 t ( d 2 + d a ) − 3 db ∫t iL dt + ∫t 3 iL dt + T 2 T 0 2 2 da = L fsiM vON ; (13) db = L fsi3 vON (14) It is easy to show that if iL is assumed to be constant and equal to iM during interval T1, the two first terms in (13) are equal and have opposite sign, and iL depends only on the linear parts of the iL waveform (Fig. 3). If we introduce a parameter d3eq = 1 − d2 − da , iL can be written as: iL = i iM (1 − d3eq ) − 3 db 2 2 (15) v C1 0 iL iM VON+ VOFF t 0 t1 t2 t3 S OFF - V OFF db T t3 t4 t VON L L d2T 0 t t t2 0 1 dT S ON i3 d aT t4 t Fig. 3: iL and vC1 waveforms in a QSW-ZVS converter. By noting that equation (15) is similar to equation (5) except for the term − i3db 2 in (15), we propose to use equation (4a) as the basis for the small-signal model of QSW-ZVS converters. We make the key assunption, which is confirmed by the simulation results to be presented below, that the original duty-cycle d is replaced by da, and d3 is replaced by d3eq in (4a) and also in the definition of A, B and C in equations (2). Thus, the QSW-ZVS converters have a small-signal model given by, 5 x$& = Ax$ + Bv$ I + Ed$a − E2 d$3eq (16) It is convenient to express d$3eq and d$a in (16) in terms of f$s and i$M since these are the parameters that can be used as control variables. From (11), (14) and (15) we obtain, d$3eq = K Li$L + K M i$M + K I v$I + K0 v$0 + Ks f$s (17) where KL, KM, KI, KO and Ks are given in Table II. By perturbing da in (14) we obtain: d$a = HM i$M + HI v$I + HOv$O + Hs f$s HM = LFs VON HI = −D VON HO = (18a) D α VON Hs = D Fs (18b) By replacing (17) and (18) in (16) the desired small-signal model of QSW-ZVS converters is finally obtained: x&$ = G X x$ + G I v$I + Gs f$s + G M i$M G X = A + EH0C − E2 K L 0 − E2 K0C (19a) (19b) G I = B + EH I − E 2 K I G s = EHs − E2 Ks (19d) G M = EHM − E2 K M (19d) (19c) TABLE II - Coefficients KL, KM, KI, KO, Ks for QSW-ZVS converters KL KM Buck − 2 IM Da + D2 IM Boost − 2 IM Da + D2 IM 2 IM Da + D2 IM where: V M= O VI Buck-Boost − KI K− K+ 2 Db ( M − 1) I M Z0 2 M − 1 2 Db M 2 I M Z0 M − 2 M K+ I3 = K0 2 Db 2 I M Z0 M − 1 1 Z0 2 2 VOFF − VON −K − − Ks 2 Db I M Z0 2 M − 1 2 Db ( M − 1) 2 I M Z0 M − 2 M − 2 Db M 2 I M Z0 M − 1 K= I3 Db I M VON − I3 Db IM Fs − I3 Db IM Fs − I3 Db I M Fs Db = I3 LFs VON This model has f$s and i$M as control variables. Since it is possible to relate f$s and i$M (we will do this bellow), we can use either as a single control variable. If we chose f$s as the control variable, the model is suitable for voltage-mode control (Fig. 4), in which a VCO (Voltage Controlled Oscillator) is used, and f$s = K VCO v$E . For incremental values, and using Laplace transforms, 6 V$E ( s ) = − Av ( s ) β V$O ( s ) (20) If we use i$M as the control variable (by expressing f$s as a function of i$M ), the model is suitable for current-mode control (Fig. 5) in which S is turned off at t4, when the inductor current sample AIRSiL is increasing and reaches the error voltage level vE. S v Q R S C1 v VCO E V Ref Av β vO Fig. 4: Voltage-mode control of QSW-ZVS converters C1 S Q S vC1 L iL F/F R Al + - - + vE R s iL Av + β vO V Ref Fig. 5: Current-mode control of QSW-ZVS converters IV. QSW-ZVS CONVERTERS WITH CURRENT-MODE CONTROL In QSW-ZVS converters the voltage ratio v0 / vI is related to i$M and f$s , and this establishes an important difference with respect to PWM and QR converters (see, e.g. [5]). We will see that this has the consequence that the dynamic behaviour of QSW-ZVS converters is almost the same with voltage-mode and with current-mode control. In order to relate i$M and f$s , we note that for all QSW-ZVS converters, the averaged voltage across the switch S is, v C1 = 1 T v C dt = VON T ∫0 1 (21) 7 If we make the usual assumption that vON and vOFF are approximately constant during a switching period, and consider the vC1 waveform represented in Fig. 3, we can write, v ON T = t1 t3 ∫t0 vC1 dt + (vON + vOFF )T2 + ∫t2 vC1dt (22) Since T1<<T, we neglect the first term in (22) and the following result is obtained: v v2 v +v ≈ cos−1 ( − ON ) + OFF − 1 + ON OFF iM Z0 2 fs vOFF vON vOFF vON ω0 (23) From Table I and (12) it follows that all three topologies have vOFF>vON, and (23) can be approximated by, ω0 fs ≈ π 2 + vOFF vON + vOFF + i Z vON vON vOFF M 0 (24) For the three topologies, (24) leads to: ′ ω0 π iM m ≈ + + fs 2 1 − m (1 − m )m ω0 fs ω0 fs ≈ ≈ π 2 π 2 + m −1+ +m+ m iM ′ 1− m m +1 iM ′ m (buck ) (25) (boost ) (26) (buck-boost ) (27) where, iM ′ is a normalised value of iM , and m is the voltage ratio: iM ′ = Z0iM vI ; m = vO vI (28) By perturbing (25), (26), (27) and (28) we can relate i$M and f$s for the three basic QSW-ZVS converters. This result can be written as, f$s = WM i$M + WOv$O + WI v$I (29) Equation (29) is the control law for the QSW-ZVS converters. For the buck, boost and buck-boost converters the coefficients WM, WO and WI are given in Table III. By introducing (29) in (19), a complete small-signal model for QSW-ZVS converters with current-mode control is obtained. If, alternatively , from (29), i$M is expressed as a function of f$s , and this is introduced in (19), the small-signal model of QSW-ZVS converters with voltage-mode control is obtained. Thus, (29) is the general control law for QSW-ZVS converters, either with voltage-mode, or with current-mode control. This is different from what happens with PWM and QR converters, and it is a consequence of the fact that the voltage ratio m of QSW-ZVS converters depends both on fs and on iM. For both control-modes the small-signal model for QSW-ZVS converters can be written as: x&$ = Px$ + Qv$I + Rv$E (30) where, P, Q and R depend on the control-mode: 8 a) For voltage-mode control: P = GX − W0 G MC WM Q = GI − GM (31a) WI WM (31b) R = KVCO G s + G I WI−1 (31c) b) For current-mode control: P = G X + W0G sC (32a) Q = G I + G s WI (32b) R= 1 (G sWM + E H M − E2 K M ) AI Rs (32c) TABLE III - Control law coefficients for QSW-ZVS Converters WM Buck Boost Buck-Boost Z0 Fs2 2 Z0 Fs2 (1 − M )Z 0 Fs2 M ω 0 (1 − M )VI ω 0 ( M − M )VI γ WO − WI γM I M Z −V I 0 γ Z0 − WM W M ω π (1 − 2M ) 0 − − 2 M Fs 2 γ Z0 ω0 M VI − WM γM I M Z − V I 0 W M 1 ω0 π − + 1 − 1 M 2 Fs 2 γ Z0 WM γM I M Z −V I 0 W M ω0 π 1 2 F − 2 − M − 2M 2 ( M + 1) s V. SIMULATION RESULTS The line (input to output) transfer function TIO(s), and the control (error to output) transfer function TEO(s) are shown in the reduced block diagram of Fig. 6. These transfer functions can be obtained, from (32): TIO ( s) = C sI − P −1 TEO ( s) = C sI − P −1 (33) Q (34) R TIO(s) and TEO(s) can be conveniently obtained by an appropriate computer program, such as MATLAB In order to confirm the new model, we have considered examples of different converters, and compared the results obtained from the model with those obtained by direct simulation (using a specially developed program based on the Runge-Kutta method). One example is a QSW-ZVS buck converter with the following parameters: R=15 Ω AIRS=1Ω L=2 µH C=100 µF C1=6.8 nF 9 For this converter we considered two operating points: VI [V] VO [V] M fs [kHz] i'M Case (a) 14 7.5 0.54 774 1.84 Case (b) 10 7.5 0.75 459 2.57 In Table IV we present the theoretical transfer functions obtained from our model, for cases (a) and (b). The response curves corresponding to these transfer functions have been compared with those obtained by direct simulation, considering low amplitude sinusoidal perturbations of vI and of vE with different frequencies, and close agreement was obtained. In Fig. 7 we show the control response with current-mode control. (a) (b) Fig.6: Closed-loop block diagrams: (a) Current-mode control; (b) Voltage-mode control. 10 (a) (b) Fig. 7: Control response of a buck QSW-ZVS converter. (a) M=0.54; (b) M=0.75. 11 TABLE IV-Theoretical line and control transfer functions for the QSW-ZVS buck converter under simulation Current-mode control (a) TEO ( ) 3.36 103 6.09 106 − s s +5.0 106 (s +1371.6 ) ( ( ) ) (b) 3.47 103 6.35 106 − s s +5.0 106 (s +968.9 ) (a) −57.3 4.29 106 + s s +5.0 106 (s +953.7 ) TI O (b) ( ( ( ( ) ) ) ) −59.9 4.46 106 + s s +5.0 106 (s +968.9 ) ( ) Voltage-mode control ( ) 3.36 103 6.09 106 − s s +5.0 106 (s +1371.6 ) ( ( ) ) 3.47 103 6.35 106 − s s +5.0 106 (s +3558.4 ) ( ( ) ) 601 5.1 106 − s s +5.0 106 (s +1371.6 ) ( ( ) ) 2.11 103 6.04 106 − s s +5.0 106 (s +3558.4 ) ( ) Examples of a QSW-ZVS boost and buck-boost converters have also been considered. The same good agreement between simulated and theoretical results has been obtained. VI. COMPARISON OF CURRENT-MODE AND VOLTAGE-MODE CONTROLLED QSW-ZVS CONVERTERS The small-signal models obtained in this paper can be used to investigate whether the current-mode control leads to advantages with respect to voltage mode control similar to those obtained in the case of PWM and QR converters. It is seen in Table IV that TEO(s) does not differ significantly for the two control modes: only one of the poles is different, specially in case (b). However, TIO(s) is very different for the two control modes, specially in case (b), where the voltage ratio is higher. When the voltage feedback loop is closed, as shown in Fig. 6, and the same controler AV(s) is used, the loop gain is ßAV(s) KVCO TEO(s) for voltage-mode control and it is ßAV(s) TEO(s) for current-mode control (the control transfer functions TEO(s) are defined by (30) to (34) and vary with the control-mode. If we chose for KVCO the same value that we have for HM in the case of current-mode control, the closed-loop responses are almost invariant with the control-mode, and the current-mode control will not lead to an improved dynamic response for the same stability margins. However, the difference in the input-to-output response TIO(s) can lead to an improved line regulation since the low frequency value of |TIO(s)| is smaller with current-mode control. Similar results have been obtained for the other types of converters. VII. CONCLUSIONS We have derived small-signal models of QSW-ZVS converters, based on state-space averaging. These models can be used with either current-mode or voltage-mode control. The three basic topologies, buck, boost and buck-boost have been considered. 12 We have used the new models to perform a comparative study which has lead to the somewhat surprising conclusion that QSW-ZVS converters with current-mode control do not have improved stability and dynamic performance with respect to the usual voltage-mode control. However, current-mode control has still the advantage of inherent current limitation and improved load sharing of paralleled converters; in addition it provides better line regulation. REFERENCES [1] V.Vorpérian,“Quasi-Square-Wave Converters: Topologies and Analysis”, IEEE Trans. on Power Electronics, vol. 3, pp. 183-191, April 1988. [2] R.D.Middlebrook, "Topics in Multi-Loop Regulators and Current-Mode Programming", IEEE Trans. on Power Electronics, vol. 2, pp. 109-124, April 1987. [3] D. M. Sable, R. B. Ridley, B. H. Cho, "Comparison of Performance of Single-Loop and Current-Injection-Control for PWM Converters which Operate in Both Continuous and Discontinuous Modes of Operation", IEEE Trans. on Power Electronics, vol.7, pp. 74-79, January 1992. [4] R. B. Ridley, W. A. Tabisz, F. C. Lee, V. Vorperian, "Multi-loop control for quasi-resonant converters", IEEE Trans. Power Electronics, vol. 6, pp. 28-37, January 1991. [5] J.M.D.Costa, M.M.Silva, “Small-Signal Models and Dynamic Performance of Quasi-Resonant Converters with Current Mode Control", IEEE PESC’94, pp. 821-829. Published in Midwest Symposium on Circuits and Systems, Rio de Janeiro, Brazil, August 1995, Proc. pp. 1183-1188. 13
Baixar