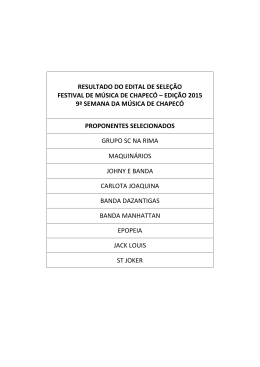
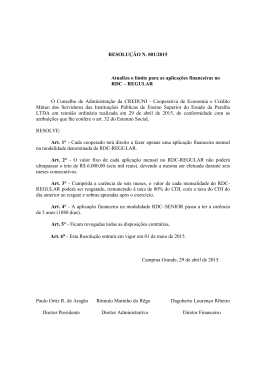
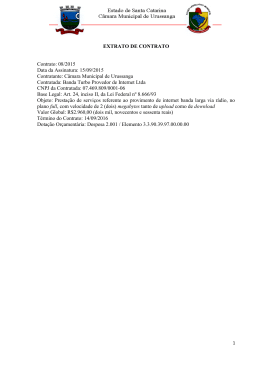
CDI – Comunicação Digital DeModulação em Banda Passante “Digital Communications – Fundamentals and Applications” Bernard Sklar 2ª edição – Prentice Hall Marcio Doniak www.sj.ifsc.edu.br/~mdoniak [email protected] CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 1/44 1. Introdução A modulação é o processo pelo qual os símbolos são convertidos em formas de onda que são compatíveis com as características do canal. Na modulação em banda base, estas formas de onda normalmente, assumem a forma de pulsos. Mas no caso de modulação em banda passante, os pulsos são modulados por uma sinusóide, chamada de portadora. E para a transmissão de sinais de radiofrequência, as formas de onda são convertidas em ondas eletromagnéticas (EM) para propagar até o destino. É necessário modular um sinal em bandabase para realizar uma transmissão de rádio? Para transmitir ondas EM no espaço é necessário o uso de antenas. E o tamanho da antena depende do comprimento de onda (λ) e da aplicação. Como, = c , logo quanto maior for a frequência f menor será o valor do λ, sendo que c = 3×10 8 m/ s. Tomando como exemplo um sinal em bandabase, com frequência de 3.000 Hz, sendo transmitido diretamente por uma antena, qual deve ser o tamanho da antena? Para especificar o tamanho da antena devemos recorrer a equação que relaciona o comprimento de onda e a frequência, = = c . Logo, o comprimento de onda desse sinal será: f 3×10 8 = 100.000. Pegando o exemplo de telefones, que trabalham com a dimensão da 3000 antena especificada em / 4, temos então, uma antena com 25.000 m. Desta forma, por aspectos físicos devemos multiplicar o sinal bandabase por uma portadora. Outros benefícios da modulação são: • Se mais de um sinal compartilha um mesmo canal, a modulação pode ser empregada para separar os dois sinais, como por exemplo, a técnica FDM (modulação por divisão em frequência). • Modulação pode ser usada para minimizar os efeitos da interferência. • A modulação também pode ser usada de forma colocar o sinal em uma faixa de frequência onde os requisitos de projeto, tais como, filtragem e amplificação do CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 2/44 sinal, podem ser facilmente satisfeitos. Este é caso onde são empregados o uso de frequências intermediárias (FI), sendo os sinais levados para a FI a fim de serem manipulados de forma mais consistente. 2. Uma Visão Vetorial dos Sinais do Ruído A representação geométrica ou vetorial dos sinais é muito útil para representar sinais tanto em bandabase como em banda passante. Um espaço ortogonal de dimensão N é definido como um espaço caracterizado por um conjunto de N funções linearmente independentes, { j t } , chamadas de funções base. Assim, qualquer função arbitrária no espaço pode ser gerada por uma combinação linear dessas funções base. A Figura 1 ilustra a representação de um sinal arbitrário no espaço. Figura 1: Representação vetorial de um sinal s m t . As funções base devem satisfazer as seguintes condições: T ∫ j t k t dt = K j jk , 0t T j , k = 1,2 ,... , N 0 onde: jk = CDI 20705 – Comunicação Digital para j = k {0,1, para o restante } DEMODULAÇÃO EM BANDA PASSANTE 3/44 jk é chamado de função delta de Kronecker. Quando as constantes K j são diferentes de zero, o espaço vetorial do sinal é dito ortogonal. Se K j = 1, então a base é dita ser ortonormal para todo j. Uma base é dita ortonormal quando cada função base dentro da representação geométrica devem ser independentes entre si e sua norma for unitária, ∥ j t ∥2 = 1. Uma das razões para para trabalhar com bases ortonormais é a medida da distância Euclidiana, fundamental no processo de detecção, é mais facilmente formulada. Embora muitos sinais não são ortogonais entre si, eles podem ser transformados em combinações lineares de bases ortonormais. Assim, qualquer forma de onda arbitrária, {s i t }, i = 1,2 ,... , M , onde cada membro do conjunto de formas de onda são fisicamente realizáveis com uma duração T, pode ser escrita como uma combinação linear de N bases ortonormais, 1 t , 2 t ,... , N t , onde N M . N si t = ∑ aij j t j=1 a ij → j-ésimo sinal da base com o i-ésimo sinal da constelação T 1 a ij = ∫ s t j t dt , Kj 0 i i = 1,2 ,... , M ; e j = 1,2 ,... , N ; 0t T Figura 2: Exemplo da projeção de um vetor em uma uma base ortonormal. O coeficiente a ij é o valor da componente j t do sinal si t. A forma da base { j t } não é especificada, pois, ela é convenientemente escolhida e depende da forma de onda do sinal, conforme está exemplificado na Figura 2. Assim, o conjunto de formas de onda, CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 4/44 {s i t } , pode ser visto como um conjunto de vetores dados por: {s i } = {a i1 , ai2 ,... , a i N }. Por exemplo, dado que N = 3, podemos escrever o vetor s m como: s m t = a m1 1 t a m2 2 t a m3 3 t . Sendo s m um ponto em um espaço Eucliano tridimensional com coordenadas a m1 , a m2 , a m3 , como está ilustrado na Figura 1. Durante uma transmissão todo sinal é perturbado por ruído. Assim, o vetor resultante que é recebido, é uma versão perturbada do sinal, por exemplo, s j n ou s k n , onde n representa o vetor de ruído. O ruído mostrado na Figura 3, é aditivo com distribuição Gaussiana. Logo, a distribuição de possíveis sinais recebidos é uma nuvem de pontos ao redor de s j ou sk . A seta marcada por r representa o vetor do sinal que pode chegar no receptor em um determinado instante de tempo. Assim, a tarefa do receptor é decidir quando o vetor r tem uma maior semelhança com s j ou com s k , no exemplo da Figura 3. Figura 3: Sinal e Ruído em espaço vetorial tridimensional. 2.1 Energia da Forma de Onda A energia do sinal si t é: 2 E i = 〈 s i t , s i t 〉 = ∥s i t ∥ CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 5/44 T T ∫ s i t Ei = 2 0 0 N N N j =1 k =1 ∫ [∑ a ij j t][ ∑ aik k t]dt dt = T N ∑ ∑ aij a ik ∫ j t k t dt Ei = j =1 k=1 0 T ∫ j t k t dt 0 { = 1, j=k 0, j≠k } N ∑ a 2ij Ei = 2 = ∥s i∥ → norma do vetor si j =1 2 2 2 2 2 E i = ai1 a i2 a i3 ... a i N = 〈 s i , s i 〉 = ∥s i∥ Observações: • Este somatório é um caso particular do Teorema de Parseval relacionando a integral do quadrado do sinal si t , ao somatório do quadrado dos coeficiente da série ortogonais. • A energia de si t é a norma quadrática do vetor que o representa. • A correlação entre si t e s j t é equivalente ao produto interno entre os vetores que representam os sinais si t e s j t A energia do sinal diferença é dada por: T Ed = T ∫ [ s 1 t−s 2 t ] 2 dt = 0 ∫ s 1 t 0 N Ed = ∑a T 2 T dt − 2∫ s 1 t s2 t dt ∫ s 2 t dt 2 0 0 N 2 1j 2 2j a − 2 a1j a 2j = j=1 ∑ a 1j−a 2j2 ≡ d 2E s 1−s 2 j=1 d 2E s1−s 2 → distância Euclidiana quadráNca Exemplo 2.1: Dados três sinais representados a seguir, s1 t , s 2 t e s 3 t , determine as bases ortonormais nos quais possa representar os três sinais e defina as equações dos sinais em função de suas bases ortonormais. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 6/44 (a) (b) (c) Figura 4: Vetores de representação dos sinais do Exemplo 1. As bases ortonormais para representar esses sinais podem ser: (b) (a) Figura 5: Vetores de representação das bases ortonormais do Exemplo 1. As equações dos sinais representadas em função das bases ortonormais são: s1 t = 1 t − 2 2 t s 2 t = 1 t 2 t s 3 t = 2 1 t − 2 t A energia dos sinais são: 2 2 E 1 = 1 −2 = 5 W 2 2 E 2 = 1 1 = 2 W E 3 = 22 −12 = 5 W E a distância Euclidiana quadrática entre os sinais s1 t e s 2 t é: T d 2E s1 , s 2 = ∫ [ s1 t − s 2 t ]2 dt = Ed 0 d 2E s1 , s 2 = 1−12 −2−12 = 32 = 9 Se escolhermos outra base ortonormal, quais serão as equações dos sinais nesta nova base ortonormal? CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 7/44 (a) (b) Figura 6: Vetores alternativos de representação das bases ortonormais do Exemplo 1. As equações dos sinais representadas em função das novas bases ortonormais representadas na Figura 6 são: s1 t = − 1 3 1 t − 2 t 2 2 s 2 t = 2 1 t 2 s 3 t = 1 3 1 t − 2 t 2 2 Uma vez que se tenha os sinais, o desafio é escolher as bases ortonormais nos quais os sinais são combinações lineares destas bases. Sejam M sinais, s1 t , s 2 t , s 3 t , ... , s M t , escolhemos um dos sinais para ser a base. 1 t = s1 t s t = 1 ∥s1 t ∥ E1 Aplica o método de ortogonalização de Gram-Schmidt. 2 t = s 2 t − 〈s 2 t , 1 t〉 1 t ∥s 2 t − 〈s 2 t , 1 t 〉 1 t ∥ Exemplo 2.2: Dados os sinais a seguir, defina uma base ortonormal para sua representação. s1 t = 10 cos 2 f c t /3 , 0 t T s 2 t = −3 cos 2 f c t − /8 , 0t T ⋮ si t = Acos 2 f c t − , 0t T As bases ortonormais são: 1 t = 2 cos 2 f c t , T CDI 20705 – Comunicação Digital 0t T DEMODULAÇÃO EM BANDA PASSANTE 8/44 2 t = 2 sen 2 f c t , T 0t T Considerando: si t = Ai cos 2 f c t − i , 0 t T , sendo Ai e i quaisquer. Vamos aplicar a seguinte relação trigonométrica: cos x − y = cos x cos y sen x sen y si t = Ai [cos 2 f c t cos i sen 2 f c t sen i ] si t = Ai cos i cos 2 f c t Ai sen i sen 2 f c t si t = Ai a i1 = Ai T cosi 1 t Ai 2 T cos i 2 e T sen i 2 t 2 a i2 = Ai T sen i 2 A representação do sinal si t em função das suas base ortonormais está ilustrado na Figura 7. Figura 7: Representação do sinal si t apresentado no Exemplo 2.2 em suas base ortonormais. 3. Representação Geométrica do Ruído Branco O Ruído Gaussiano Branco Aditivo (AWGN) pode ser expresso como uma combinação linear de formas de onda ortogonais da mesma forma que os sinais. Para o caso de detecção do sinal, o ruído pode ser paticionado em duas componentes: n t = n t n t n t → processo estocásNco que representa do ruído AWGN n t → é a projeção de n t na base ortonormal { i } n t → tudo o que está fora de { i } CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 9/44 Nosso interesse está na projeção de n t no espaço gerado por 1 t , 2 t , ... , N t , no qual os sinais s1 t , s 2 t , ... , s M t se encontram. N ∑ n j j t n t = j =1 T nj = ∫ n t j t dt , j = 1, 2, ... , N 0 n j → projeção do ruído no espaço j t. É uma variável aleatória. A média de n j é: T T E 〈n j 〉 = E {∫ nt j t dt } = 0 ∫ E {n t } j t dt = 0 0 Um ruído AWGN tem como características: • E {nt } = 0 • Rn = N0 2 • Sn f = N0 2 T T E {ni n j } = E { ∫ n t i t dt ∫ nt ' j t' dt' } 0 0 T T E {ni n j } = ∫∫ E { n t nt ' }i t j t' dt dt' 0 0 ' ' E { nt n t } = Rn t − t = T E {ni n j } = ∫ 0 N0 ' t − t 2 N0 t j t dt 2 i Considerando um processo estacionário no sentido amplo, temos: E {ni n j } = N0 2 De acordo com a ortonormalidade da base: CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 10/44 2 E {ni n j } = 0 ij Logo: 20 = N0 → representa a potência do ruído para cada dimensão, ou a variância 2 para cada dimensão. 3. Técnicas de Modulação Digital Seja o sinal sinusoidal: s t = A cos , sendo = w 0 t O sinal tem como parâmetros livres para escolha: • amplitude: A • frequência: w 0 • fase: A informação pode estar contida em um ou mais desses parâmetros. 3.1 Modulação por Deslocamento em Fase – PSK A expressão analítica que define um sinal PSK é: si t = 2E cos w0 t i t , T {0t T } i = 1, 2, ... , M Sendo que a informação está contida no termo da fase, i t , que tem M valores discretos, tipicamente definidos como: i t = 2 i, M i = 1, 2, 3, ... , M Para um sinal binário PSK (BPSK), ilustrado na Figura 8, M é 2. O parâmetro E representa a energia de símbolo e T a duração do símbolo. Na modulação BPSK, os dados modulados deslocam a fase do sinal si t dentre dois estados, zero e 180° (π). CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 11/44 Figura 8: Forma de onda e vetorial de um sinal BPSK. Qual a energia de si t para i = 0 ? T E = T ∫ s t dt 2 i = 0 cos 2 w0 t dt 0 1 cos 2 w 0 t dt , ∫ 2 0 T 2E E = T E = ∫ 2TE como w 0 ≫ 2 T 2E 1 T − 0 = E T 2 3.2 Modulação por Deslocamento em Frequência – FSK A expressão geral analítica da modulação FSK é: si t = {i0=1,t 2, T... , M } 2E cos wi t T Sendo as frequências w i escolhidas de modo que os sinais si t sejam ortogonais entre si. Desta forma: T 〈 si , s j 〉 = ∫ si t s j t dt 0 = {E0,, i= j i≠ j } Seja o exemplo ilustrado na Figura 9, de um sinal 3-FSK. Quais seriam as bases ortonormais i t da modulação 3-FSK? Como os sinais si t já são ortogonais entre si, basta normalizar a constelação. Desta forma, temos: i t = s i t E i = 1, 2, ... , M = N Figura 9: Forma de onda e vetorial de um sinal FSK com M = 3. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 12/44 Figura 10: Exemplo das bases ortonormais de uma modulação 3-FSK. Note que todos os sinais são equidistantes entre si. 3.3 Modulação por Deslocamento em Amplitude (ASK) A expressão analítica da modulação FSK é: si t = ± 2 Ei cos w 0 t T {i0=1,t 2, T... , M } Note que a informação está contida na amplitude, E i . A Figura 11 ilustra um exemplo de modulação 2-ASK. Neste caso, o sinal representado na base ortonormal é igual ao BPSK, apresentado na Figura 8. Veja o exemplo apresentado na Figura 12 (a) de uma modulação 4-ASK, como se torna diferente de uma modulação 4-PSK (ou QPSK), apresentado na Figura 12 (b). Figura 11: Forma de onda e vetorial de um sinal ASK. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 13/44 (a) (b) Figura 12: (a) Exemplo de uma modulação 4-ASK. (b) Exemplo de uma modulação QPSK. 3.4 Modulação por Deslocamento em Amplitude e em Fase Combinados Trata-se da combinação das modulações ASK e PSK, sendo chamada de APK. Neste tipo de modulação encontramos a M-QAM (Quadrature Amplitude Modulation), no qual tem a seguinte expressão analítica: si t = ± 2 Ei cos w 0 t i T {i0=1,t 2, T... , M } A Figura 13 ilustra a modulação 8-APK. Figura 13: Forma de onda e vetorial de um sinal 8-APK. A Figura 14 ilustra o exemplo de uma modulação QAM. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 14/44 Figura 14: Exemplo de uma modulação QAM. A energia média da modulação QAM é: 2 2 2 2 2 2 4 1 1 8 1 3 4 3 3 E = 16 2 2 2 E = 4×2 2 8×10 2 4×18 2 16 E = 160 2 = 10 2 16 2 2 2 4. Detecção de Sinais Modulados na Presença de Ruído Gaussiano O modelo em banda passante do processo de detecção é praticamente igual ao modelo em bandabase. Pois, o sinal recebido em banda passante é primeiramente convertido em um sinal bandabase antes de realizar a etapa de detecção. E para sistemas lineares, a matemática envolvida no processo de detecção não é afetada por um deslocamento na frequência. Assim, podemos definir um teorema de equivalência como segue: Realizando o processamento de sinal linear em banda passante, seguido por um CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 15/44 demodulador heterodino para converter o sinal em bandabase, produz o mesmo resultado que usar um demodulador hetorodino para converter o sinal em bandabase, seguido pelo processamento do sinal linear em banda base. O termo heterodino refere-se ao processo de conversão em frequência ou mixing, que produz um deslocamento em frequência no sinal. Como resultado deste teorema, todo processamento de sinal pode ser realizado em bandabase, que é desejável devido a simplicidade, tendo os mesmos resultados do que em banda passante. 4.1 Regiões de Decisão Considere o espaço bidimensional apresentado na Figura 15, cujos os sinais s1 t e s 2 t são perturbados por ruído. O vetor de ruído, n , é um vetor aleatório com média nula, e o vetor recebido, r , é um vetor aleatório com média s1 ou s 2 . Logo, a tarefa do detector é decidir qual dos sinais s1 ou s 2 , foi de fato transmitido. Para o caso de sinais binários, igualmente prováveis, na presença de ruído AWGN, o critério de decisão é equivalente a escolher entre qual sinal possui a menor distância Euclidiana. d E r , si = ∥r − s i∥ → distância Euclidiana entre o vetor que representa o sinal recebido, r , e os vetores de sinal s 1 e s 2 . Esta regra é normalmente definida através de regiões de decisão, como apresenta a Figura 15. Assim, decide-se por s1 se r Região 1, ou d E r , s1 d E r , s 2 . CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 16/44 Figura 15: Regiões de decisão de dois sinais com mesma amplitude. 4.2 Receptor com Correlator Seja uma constelação com M sinais em um espaço linear de N dimensões, sendo N M , gerado pelas bases ortonormais: 1 t , 2 t , ... , N t , como ilustram a Figura 16 e a Figura 17. Sendo que na Figura 16 é aplicado o filtro casado e na Figura 17 emprega-se o correlator. Para detecção binária, o correlator de recepção pode ser projetado com dois filtros casado ou com dois produtos integradores (fazendo uso das funções base ortonormais). Mas existe um limiar de decisão ótimo que pode ser definido pelo sinal diferença, como ilustra a Figura 18. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 17/44 Figura 16: Receptor com correlator referenciado aos Sinais. Figura 17: Receptor com correlator referenciado as funções base ortonormal. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 18/44 (a) (b) Figura 18: (a) Limiar de decisão ótimo para o caso binário. (b) Circuito para o limiar de decisão ótimo binário. 5. Receptor Coerente O receptor é dito coerente quando a referência de FASE é conhecida no receptor. 5.1 Receptor Coerente do PSK Considere o seguinte exemplo de sinal binário PSK (BPSK): s1 t = s 2 t = s 2 t = − 2E cos w 0 t , T 0t T 2E cos w0 t T 2E cos w0 t , T 0t T Onde o termo é uma constante arbitrária, então, a análise não será afetada se atribuírmos = 0. O parâmetro E é a energia do símbolo, e T representa a duração do símbolo. A função base ortonormal para este caso antipodal ou bipolar é: 1 t = 2 cos w 0 t . T Os sinais transmitidos podem ser definidos como: CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 19/44 s1 t = E 1 t s 2 t = − E 1 t Assumindo que o sinal s1 t foi transmitido na presença de ruído AWGN com média zero, o valor esperado dado é: T E {z 1 / s 1} = E { ∫ T 1 n t 1 t dt } 2 0 T E {z 1 / s 1} = E { ∫ 0 2 T E cos2 w0 t n t 2 cos w0 t dt } = T E T E {z 2 / s 1 } = E { ∫ − T 21 n t 1 t dt } 0 T E {z 2 / s 1 } = E { ∫ − 0 2 T E cos2 w0 t n t 2 cos w0 t dt } = − E T 5.1 Receptor Coerente do M-PSK Um sistema M-PSK típico pode ser expresso como: si t = {i0=1,t 2, T... , M } 2E 2 i cos w 0 t − , T M Com as seguintes bases ortonormais: 1 t = 2 cos w 0 t T e 2 t = 2 sen w 0 t T Seja o exemplo de um sinal QPSK, com M = 4. No transmissor, os dígitos binários são coletados 2 a cada período T, e para cada intervalo de símbolo, a sequência de 2 dígitos binários informa ao modulador qual das 4 formas de onda do sinal de informação deve ser transmitida. E o sinal de informação pode ser reescrito como: si t = a i1 1 t ai2 2 t si t = E cos {i0=1,t 2, T... , M } 2 i 2 i 1 t E sen 2 t M M No exemplo do sinal QPSK, M = 4, mostra que os sinais de informação estarão sobre o eixo 1 t ou 2 t . A partir da descrição destes sinais nos seus eixos é possível definir a região de decisão para cada sinal, como está ilustrado na Figura 19. E os sinais gerados são: CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 20/44 s1 t = E 1 t s 2 t = s 3 t = − E 1 t E 2 t s 4 t = − E 2 t Figura 19: Regiões de decisão para um sistema QPSK coerente. O demodulador QPSK ilustrado na Figura 20 utiliza apenas dois integradores para fazer a detecção do sinal transmitido, ao invés de usar um integrador para cada sinal. Isto é posível porque as formas de onda dos sinais podem ser expressas como combinações lineares das duas funções base ortonormais. Assim, o vetor do sinal recebido, r , pode ser projetado nas duas funções base ortonormais, conforme ilustra a Figura 21. Sendo o sinal decidido com base no ângulo recebido . = arctan Y X e i = 2 i M Sendo que pode ser visto como o ruído estimado do sinal transmitido. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 21/44 Figura 20: Demodulador para sinais MPSK. Figura 21: Componentes em fase (X) e em quadratura (Y) do vetor de sinal recebido r . 5.1 Receptor Coerente do M-FSK Relembrando que os sinais FSK possuem a informação contida na componente de frequência. E os sinais são ortogonais entre si. Os sinais FSK são descritos como: si t = 2E cos wi t T {i0=1,t 2, T... , M } A base ortonormal é: j t = si t = 2 cos w j t T { j0=1,t 2,T... , N = M } E i t CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 22/44 O espaço vetorial de um sistema 3-FSK é ilustrado na Figura 21. A distância entre dois símbolos é: d E si , s j = ∥s i − s j∥ = E 2 2 E = 2 E , para i ≠ j . Figura 22: Espaço vetorial para um sinal 3-FSK. A detecção é realizada pela correlação do sinal r t com as M bases ortonormais, sendo decidido pelo maior valor das correlações. 6. Detecção Não Coerente Neste caso o conhecimento da referência da fase não é requerido. 6.1 Detecção PSK Diferencial (DPSK) O termo PSK Diferencial (DPSK) muitas vezes precisa de esclarecimento porque dois aspectos separados do formato da modulação/demodulação vem sendo referenciado ao: procedimento de codificação e procedimento de decodificação. O termo codificação diferencial se CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 23/44 refere ao procedimento de codificar os dados diferencialmente; ou seja, a presença de um sinal binário um ou zero está baseada na semelhança ou diferença quando comparado com o símbolo precedente. O termo detecção coerente diferencial de uma codificação diferencial PSK, usualmente chamado de DPSK, refere-se frequentemente ao esquema de detecção classificado como não coerente porque ele não necessita da referência de fase da portadora recebida. Ocasionalmente, a codificação diferencial PSK é coerentemente detectada. O sinal PSK transmitido é: si t = 2E cos w 0 t i T 0t T E o sinal recebido é: si t = 2E cos w0 t i T 0t T Onde é uma constante arbitrária, e é tipicamente uma variável aleatória uniformemente distribuída entre 0 e 2 . No DPSK supomos que é uma constante dentro de um intervalo de tempo igual a 2T segundos, o que é razoável na prática, e associamos a informação à diferença de fase, e não ao valor absoluto dela. A informação transmitida em t = kT : kT = kT − [k −1T ] No receptor teremos: kT − [ k −1T ] kT = kT = kT − {[k −1T ] } kT = kT Ou seja, a rotação desconhecida da fase não afeta a recuperação da informação. A Tabela 1 mostra um exemplo de uma transmissão binária DPSK – DBPSK. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 24/44 Tabela 1: Exemplo de uma transmissão DBPSK. k 0 1 2 3 4 Informação b kT 0 1 1 0 1 Diferença de fase kT 0 0 Fase transmitida kT = kT [k −1T ] 0 −0= =0 00=0 0= Recuperação informação kT – − 0= 0− = 0− 0=0 − 0= – 1 1 0 1 kT kT Bit de informação 0 → 0 1 → É possível calcular a diferença de fase sem conhecer as fases? A Figura 23 ilustra o esquema de detecção DBPSK na forma de diagrama de bloco. Note que, assim como no PSK coerente, nós seguimos correlacionando o sinal recebido com a referência. A diferença está no fato do sinal de referência ser simplesmente uma versão atrasada do símbolo recebido no instante anterior. Ou seja, é a correlação do sinal em fase ou em oposição de fase, como está ilustrado na Figura 24. Figura 23: Detector coerente diferencial do DBPSK. O limiar de decisão é: = k − k −1 CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 25/44 (a) (b) Figura 24: (a) Sinal DBPSK recebido e sua amostra atrasada de T segundos em fase. (b) Sinal DBPSK recebido e sua amostra atrasada de T segundos em oposição de fase. (a) (b) Figura 25: Detector coerente diferencial ótimo. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 26/44 O detector apresentado na Figura 23 é considerado subótimo do ponto de vista de performance de erro. O detector diferencial ótimo para DPSK necessita de uma portadora no domínio da frequência, mas não necessariamente em fase com a portadora recebida. O diagrama de bloco deste detector diferencial ótimo está ilustrado na Figura 25. A Figura 26 exemplifica o fato de que o sinal recebido não precisa necessariamente estar em fase com a portadora. Figura 26: Exemplo de um sinal DPSK-binário recebido que não está em fase com a portadora. 6.2 Detecção Não Coerente do FSK: Sejam os sinais BFSK: CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 27/44 s1 t = s 2 t = 2E cos w 1 t T 0t T 2E cos w2 t T 0t T Onde w 1 e w 2 são escolhidos tal que: cos w 1 t 1 seja ortogonal a cos w 2 t2 para quaiquer 1 e 2 . O espaço vetorial dos sinais s1 t e s 2 t está apresentado na Figura 27. Figura 27: Espaço Vetorial para sinais BFSK. Um detector projetado para detectar formas de onda de sinais FSK não coerente podem ser implementados com correlatores similares aos da detecção coerente. Entretanto, o hardware deve ser configurado como um detector de energia, sem tirar partido das medidas de fase. Por esta razão, o detector não coerente necessita tipicamente duas vezes mais correlatores do que o detector coerente. A Figura 28 ilustra o diagrama de blocos do detector não coerente para o sinal BFSK. E a Figura 29 ilustra os espaços vetoriais em fase e em quadratura descritos no diagrama de blocos da Figura 28. Conforme está ilustrado na Figura 28 será necessário realizar 4 correlações: T z 1 t = ∫ r t [ 0 T z 2 t = ∫ r t [ 0 CDI 20705 – Comunicação Digital 2 cos w 1 t ] dt T 2 sen w1 t] dt T DEMODULAÇÃO EM BANDA PASSANTE 28/44 T z 3 t = ∫ r t [ 0 T z 4 t = ∫ r t [ 0 2 cos w 2 t ] dt T 2 sen w 2 t ] dt T Figura 28: Diagrama de blocos do detector não coerente BFSK. Figura 29: Espaço vetorial das componentes em fase e em quadratura dos sinais s1 t e s 2 t de um detector não coerente BFSK. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 29/44 Para exemplificar, vamos supor que o sinal s1 t tenha sido transmitido: Situação 1: = 0 O sinal recebido será: r t = s 1 t Assim: z1 = E z2 = z3 = z 4 = 0 Situação 1: = / 2 O sinal recebido será: r t = z2 = 2E cos w1 t = T 2 2E sen w1 t T E z1 = z3 = z4 = 0 Situação 1: arbitrário O sinal recebido será: r t = z1 = 2E cos w1 t T E cos z2 = E sen z3 = z4 = 0 z 21 z 22 = E ∀ = z 23 z 24 = 0 ∀ = Logo, será decidido que o sinal s1 t foi transmitido. Observação: O espaçamento entre portadoras no FSK coernte é coerente é 1 , e no FSK não 2T 1 . A prova está no livro de referência deste texto entre as páginas 200 e 204. 2T CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 30/44 7. Desempenho de Erro para Sistemas Binários Uma importante medida de performance usada para comparar esquemas de modulação digital é a probabilidade de erro. A probabilidade de erro está associada na medida de probabilidade do detector tomar uma decisão errada sobre o símbolo transmitido. As medidas de erro são: P E ou P S → probabilidade de erro de símbolo P B ou BER → probabilidade de erro de bit P E = PB . Para sistemas binários, onde M = 2, 7.1 Probabilidade de erro para o BPSK Coerente Sejam os sinais: s1 t = 1 t = Onde, E b 1 t s 2 t = − E b 1 t e 2 cos w 0 t T 0t T E b é a energia de bit. Considerando que os sinais são equiprováveis na presença de ruído AWGN, então temos: P s1 = P s 2 = 0,5 P B = P H 2 / s 1 P s1 P H 1 /s 2 P s 2 Dado que o AWGN é um canal simétrico e o sinais são equiprováveis: P H 2 / s 1 = P H 1 / s 2 Relembrando do caso em banda básica: P B = Q a 1−a 2 2 0 T ai = ∫ s i t 1t dt 0 CDI 20705 – Comunicação Digital = { Eb , − E b , i =1 i=2 } DEMODULAÇÃO EM BANDA PASSANTE 31/44 ∞ Q x = ∫ 21 e−z / 2 dz 2 x Logo, P B = Q E b−− E b 2 0 = Q Eb 0 Como, T 2 = E {[∫ n t 1 t dt ] } = 2 0 0 N0 2 Então, P B = Q 2 Eb N0 Exemplo: Encontre a probabilidade de erro de bit para um sistema BPSK com taxa de 1 Mbit / s. As formas de onda recebidas s1 t = A cos w 0 t e s 2 t = −A cos w 0 t , são coerentemente detectadas com um filtro casado. O valor de A = 10 mV. Considere que a densidade espectral de potência de um lóbulo do ruído é N 0 = 10−11 W / Hz , a potência do sinal e a energia de bit são normalizadas com relação a carga de 1 ohm. A = T = 1 1 −6 = = 10 s 6 Rb 10 2 Eb −2 = 10 V T 2 2 Eb −2 2 = 10 T → 2 Eb = 10−4 T → Eb 10−6 = 10−4 2 E b = 5 × 10−11 J Logo, 2 Eb = N0 P B = Q 2 × 5 × 10−11 = 3,16 10−11 2 Eb = Q 3,16 = 8 × 10−4 N0 CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 32/44 7.3 Probabilidade de erro para o caso geral Seja a seguinte modulação binária descrita na Figura 30. Como podemos obter a probabilidade de erro desta modulação? Figura 30: Caso geral de uma modulação binária. Onde, E b → energia de bit. Vamos recorrer a seguinte expressão de probabilidade de erro: P B = Q Ed 2N 0 T Ed = ∫ [s 1 t − s2 t ]2 dt → energia do sinal diferença 0 T Ed = T T 0 0 ∫ s t dt − 2 ∫ s 1 t s2 t dt ∫ s22 t dt 2 1 0 E d = E b − 2 ∥s 1∥ ∥s 2∥ cos E b Ed = 2 Eb − 2 E b E b cos = 2 E b − 2 E b cos E d = 2 E b 1− = cos → correlação normalizada entre s1 t e s 2 t −1 1 Logo, CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 33/44 P B = Q P B = Q Ed 2 E b 1 − = Q 2N 0 2 N0 E b 1 − N0 Casos particulares: • = −1 → = → BPSK → P B = Q • = 0 → = / 2 → BFSK → P B = Q 2 Eb N0 Eb N0 7.3 Probabilidade de erro para o DBPSK Coerente Vamos supor que k−1 = k = 0, ou seja, k = 0 (informação). Quando haverá um erro no BPSK Diferencial? O erro ocorrerá quando durante um intervalo de bit ocorrer uma inversão de fase, o que neste caso, seria obter um k = , e isso ocorre se: Decisões do receptor coerente BPSK k−1 k 0 0 0 Vai ocasionar erro 0 Vai ocasionar erro A probabilidade de erro no DBPSK é: = P k−1 = , k = 0 P B = P k = 0, k−1 PB = 2 Q 2 Eb 2 Eb 1 − Q N0 N0 7.4 Probabilidade de erro para o BFSK coerente Recorremos ao caso geral da seção 7.2, com = 0. Assim, CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 34/44 P B = Q Eb N0 7.5 Probabilidade de erro para o BFSK NÃO coerente Sejam os sinais BFSK: si t = {0i =t 1, T2 } 2E cos wi t T Supondo que o sinal s 2 t foi transmitido: z 1 t = n1 t z 2 t = s 2 t n 2 t E se desconsiderarmos o ruído: z 1 t = 0 z 2 t = s 2 t = 2 Eb N0 Agora considerando o ruído, a probabilidade de erro dado que o sinal s 2 t foi transmitido é: P H 1 / s 2 = P z 1 z 2 / s 2 Para isso precisamos saber as funções densidade de probabilidade de p z 1 / s 2 e p z 2 / s 2 . p z 1 / s 2 = { z1 z 21 0 0, 2 20 exp − 2 , para z 1 0 para z 1 0 } Note que p z 1 / s 2 representa apenas o ruído e tem uma distribuição Rayleigh. p z 2 / s2 = { z2 exp − 2 0 0, 2 Eb 2 T I 0 z 2 2 20 z 22 2 Eb 20 , para z 2 0 para z 2 0 } Sendo que a p z 2 / s 2 representa a envoltória do sinal mais o ruído e tem uma distribuição Ricean. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 35/44 1 I 0 x = 2 2 ∫ exp x cos d → função de Bessel modificada de ordem zero e Npo 0 1. Assim, ∞ ∫ P z 1 z 2 / s2 , z2 P B = P z 1 z 2 / s 2 = p z 2 /s 2 dz 2 0 Note que z 2 foi fixado no primeiro termo da integral. PB = ∞ z2 0 0 ∫ [∫ p z 1 / s 2 dz 1] PB = −E b 1 exp 2 2T 20 PB = −E b 1 exp 2 2N0 p z 2 / s 2 dz 2 20 = N0 N0 2W = 2 T 7.6 Probabilidade de erro para o DPSK NÃO coerente Vamos inicialmente considerar o caso BPSK: x 1 t = x 2 t = 2E cos w0 t T 0t T 2E cos w 0 t = − x 1 t T 0t T O DPSK pode ser visto como: bit 0: s1 t = x 1 , x 1 ou x2 , x2 0 t 2T bit 1: s 2 t = x 1 , x 2 x 2 , x 1 0 t 2T ou Logo, é interessante verificar a ortogonalidade entre s1 t e s 2 t: CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 36/44 2T T ∫ s1 t s 2 t dt = 0 2T ∫ x 1 t x 1 t dt ∫ x 1 t x 2 t dt 0 2T T T 2T ∫ s 1 t s 2 t dt = 2TE ∫ cos2 w 0 t dt − 2TE ∫ cos2 w 0 t dt 0 0 T 2T T ∫ s 1 t s 2 t dt = 0 2T ∫ s 1 t s 2 t dt = 0 2T 2 E 1cos 2w 0 t 2 E 1cos w 0 t dt − dt ∫ ∫ T 0 2 T T 2 2E 1 2E 1 T − 0 − 2T − T = E−E = 0 T 2 T 2 Seguindo o mesmo raciocínio: 2T T ∫ s 1 t s 2 t dt = 2T ∫ x 1 t x 2 t dt ∫ x 1 t x 1 t dt 0 0 T 2T T 2T ∫ s 1 t s 2 t dt = ∫ x 2 t x1 t dt ∫ x 2 t x 2 t dt = 0 0 0 T 2T T 2T ∫ s 1 t s 2 t dt = 0 = 0 ∫ x 2 t x 2 t dt ∫ x 2 t x 1 t dt = 0 0 T Então, concluímos que os sinais s1 t e s 2 t são ortogonais entre si, e portanto, o DPSK não coerente é semelhante ao FSK(2T) não coerente. O receptor não coerente para o DPSK pode ser equivalente ao do FSK não coerente. A probabilidade de erro é igual à do FSK, sendo que a energia do sinal é 2 vezes maior, uma vez que si t dura 2T segundos. Para o FSK não coerente temos: PB = E 1 exp− b 2 2N0 Assim, para o DPSK não coerente (receptor diferencial ótimo), temos: PB = E 1 exp− b 2 N0 7.7 Comparação da PB dentre diversos moduladores digitais A Figura 31 ilustra uma comparação dentre diversos moduladores digitais coerente e não CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 37/44 coerente. Figura 31: Probabilidade de erro de bit para diversos tipos de modulação digital. 8. Relação Sinal-Ruído e Eficiência Espectral A relação sinal-ruído possui as seguintes nomenclaturas: • S/R → relação do sinal sobre o ruído • SNR → relação do sinal sobre o ruído • Eb/N0 → energia de bit sobre a densidade espectral de potência do ruído Algumas definições: CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 38/44 • T → duração do bit (dado em segundos) • R= • W → largura de banda do sinal • Sn f = • S → potência média do sinal • N → potência média do ruído 1 → taxa de bit (bits por segundo – bps) T N0 [W / Hz] → densidade espectral de potência do ruído 2 Em comunicação digital, adotamos a nomenclatura para a relação sinal-ruído, E b / N 0 : Eb Energia de bit = N0 Densidade espectral de potência do ruído E b [ Joule] = S [Watt ] × T [seg ] N = 2× N0 [Watt / Hz ] × W [ Hz ] 2 N = N 0 [Watt ] Eb S ×T S/R S W = = = N0 N /W N /W N R Chamamos de eficiência espectral: R bits /s = W Hz E a relação sinal-ruído: Eb S/N = N0 R/W 9. Modulação M-ária Em uma modulação M-ária, o modulador gera uma das M formas de onda, onde M = 2k . Sendo que o sinal binário é um caso especial para k = 1. A partir deste estudo poderemos responder a algumas perguntas, tais como: CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 39/44 • Sinais M-ários podem melhorar ou piorar a performance do modulador digital? • Por que o MFSK tem uma melhor P B quando k cresce? • Por que, então, não abandonamos o MPSK e adotamos o MFSK? • Como melhorar o desempenho do MPSK? Para responder as essas perguntas, vamos analisar as figuras 32 e 33 a seguir. Figura 32: Performance de erro da modulação M-ária FSK para valores de k variando entre 1 e 20. CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 40/44 Figura 33: Performance de erro da modulação M-ária PSK para valores de k variando entre 1 e 5. No PSK a medida que aumentamos a quantidade de sinais, M, diminuimos a distância Euclidiana entre os M pontos da constelação. Já no FSK esta distância permanece constante, pois, cada sinal é ortogonal a todos os demais. E nas figuras 32 e 33 foi considerado apenas o critério da probabilidade de erro de bit sobre à relação sinal-ruído. Não foi considerado, por exemplo, a largura de banda, a potência de cada sinal, a taxa de transmissão, a complexidade e o custo, o que pode mudar o cenário apresentado. Para responder a pergunta: Como melhorar o desempenho do MPSK? Devemos olhar para a Figura 34 e verificar que nesta constelação quando aumentamos a quantidade de pontos, diminuimos a distância entre os pontos. Então, para compensar a melhora no desempenho do MPSK em termos de BER, temos que aumentar a energia de bit a medida que aumentamos os pontos da constelação. Assim, manteremos os pontos bem afastados entre si. É claro, que existem CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 41/44 limitantes de potência, como por exemplo, normatizações da Anatel. Note que a distância para o BPSK e para o QPSK é a mesma, ou seja, eles têm a mesma BER. Pois, o seu aumento exponencial de pontos é igual ao aumento linear de energia, 2 2 = 2×2. Figura 34: Constelação M-PSK para k = 1, 2 e 3. O QPSK com taxa de R bps e potência média S watts pode ser visto como 2 BPSK ortogonais e independentes, cada um com taxa R/ 2 bps e potência média S /2 watts. • QPSK: Eb S W = N0 N R • BPSK: Eb S /2 W S W = = N0 N R/2 N R Como a relação sinal-ruído, Eb , é a mesma nos dois casos, então, o BPSK possui a N0 mesma BER que o QPSK. No MFSK uma vez fixada a energia E s a distância Euclidiana não muda entre os sinais com o aumento de k bits, pois a distância entre dois sinais será sempre igual a 2 E s para qualquer valor de k. Fazendo uma análise da relação sinal-ruído, temos: Eb S W = N0 N R R = k Ts CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 42/44 T s → taxa de símbolo W = 1 → largura de faixa de detecção Ts Logo, Eb 1 S = N0 k N A Figura 35 ilustra a probabilidade de símbolo versus a SNR e versus E b / N 0 para o MFSK dado os valores de k = 1 e k = 10. Figura 35: Probabilidade de errro de símbolo versus SNR e E b / N 0 do MFSK. A Figura 35 ilustra uma probabilidade de erro de símbolo fixa em 10−3 . Para este valor temos: Eb/ N 0 SNR BFSK 10 dB 10 W 10 dB 10 W 10-FSK 13 dB 20 W 3 dB 2W 10. Probabilidade de Erro de Símbolo para Modulação M-ária CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 43/44 CDI 20705 – Comunicação Digital DEMODULAÇÃO EM BANDA PASSANTE 44/44
Download